 機器人PLC控制要點
機器人PLC控制要點


機器人安全控制程序


機器人安全控制程序-機器人急停反饋控制

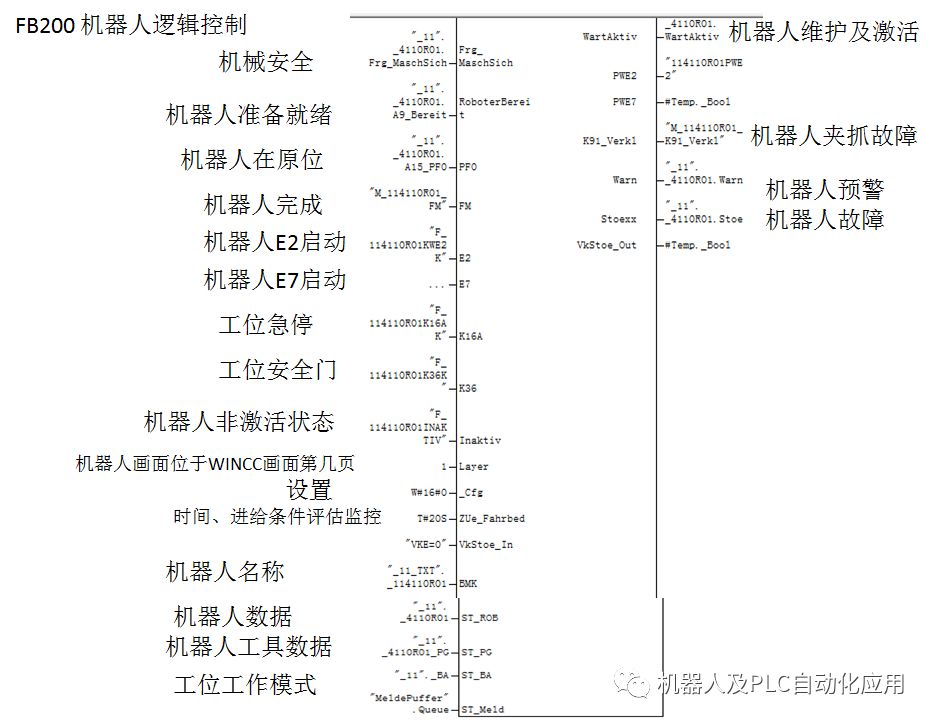
FB200 機器人邏輯控制

1.KRC-PLC BEREIT ----------1- O_R_Bereit=9 A9機器人準備就緒$RC_RDY1 $OUT[9]
2.KRC-PLC RK9 ----------1- O_R_Auto=12$I_O_ACTCONF$OUT[12]機器人自動模式
3.KRC-PLC RK100 ----------1-O_R_RK100=10 A10機器人控制系統啟動RK100=10 $OUT[RK100]=MERK1 ,MERK1=$ALARM_STOP AND $USER_SAF$ALARM_STOP:報警停止,$USER_SAF:安全門監視用戶安全 $USER_SAF $OUT[4059]機器人安全信息滿足。
4.KRC-PLC PF0----------1 -$OUT[PF0]=(P0_MERKER OR (DownLoadActive AND ($Mode_OP==#EX))) AND$IN_HOME -$IN_HOME :$OUT[4036]–在FOLGE程序的首部存儲當前的軸坐標為初始點VW(#VW_AUE_WAIT,TRUE )
5.PLC-KRC ANTEIN----------2-I_R_Ant_Ein=10驅動接通 E10
6.KRC-PLC SAK ----------3-O_R_SAK=16在軌跡上$NEAR_POSRET:$OUT[16]
7.PLC-KRC FLGNO----------4 -PRG_NR $IN[1] TO $IN[8]程序號給入
8.KRC-PLC FLGNO----------5-PRG_NR_REFL$OUT[1] TO $OUT[8]程序號返回
9.PLC-KRC SRB----------6-程序啟動I_R_SRB=9 -E9
10.KRC-PLC PF0----------7 -機器人不在原位
11.KRC-PLC LPTK ----------8–程序到達最后一點LPKT=14-在FOLGE程序中最后執行VW (#VW_AUE_END,TRUE)發出程序在最后1點,等待一段時間后再關閉。
12.PLC-KRC FLGNO ----------9-PRG_NR關閉
13.KRC-PLC FLGNO ----------10- PRG_NR_REFL關閉
14.KRC-PLC LPTK----------11- 機器人最后一點關閉
15.KRC-PLC PF0----------12- 機器人在原位


FB205機器人完成信號
如果是非標的PLC和機器人項目可自行規定機器人完成信號區域

機器人之間的連鎖信號之間的控制:需要認為設定一個IO區域用來控制機器人之間互鎖區域.

當1號 進入干涉區 會關閉與2號機器人的安全信號,而2 號機器人在進入安全區時會等待這個安全信號,等1 號 機器人離開后發出允許信號后再進入。



工位運行順序控制,需要設定一定的區域范圍。

機器人給PLC反饋的工具控制狀態
-
控制系統
+關注
關注
41文章
6952瀏覽量
114087 -
機器人
+關注
關注
213文章
31073瀏覽量
222182 -
plc
+關注
關注
5051文章
14592瀏覽量
486882
原文標題:機器人PLC控制要點
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
小蘿卜機器人的故事
機器人競技幕后:磁傳感器芯片激活 “精準感知力”

工業機器人的特點
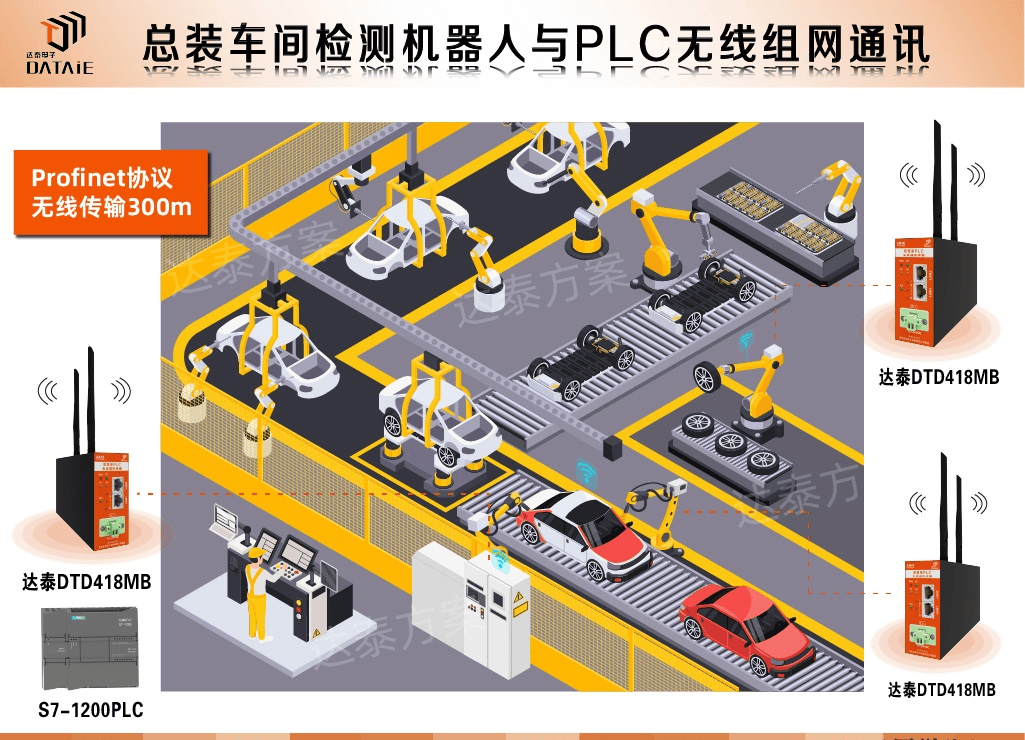
汽車制造車間檢測機器人與PLC無線以太網實時控制方案
跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
雅特力科技助力宇樹科技推動智慧機器人創新應用:深入布局機器人電機控制核心

工業機器人4大控制方式,你知道幾種?




 工商網監
工商網監
評論