 電子發(fā)燒友App
電子發(fā)燒友App



引言
在五自由度主動磁懸浮軸承控制系統(tǒng)中,采用由工控PC+DSP控制器的架構(gòu)是一種較好的方法,而DSP核心控制器則是磁懸浮軸承控制系統(tǒng)中非常重要的一部分,對主軸位置信號的精確采集是DSP控制器的首要任務(wù)。在本控制器中采用MAX115對主軸位置的模擬信號進行采集。

圖1 磁懸浮軸承DSP控制器的結(jié)構(gòu)簡圖

圖2 MAX115與TMS320F240 DSP之間的接口電路圖
磁懸浮控制器中的ADC選擇
在磁懸浮主軸控制器的設(shè)計中,對主軸位置的測量是至關(guān)重要的。位置傳感器的信號經(jīng)過適當?shù)男盘栒{(diào)理電路處理后被傳送到A/D采樣通道,ADC把得到的模擬信號轉(zhuǎn)換成相應(yīng)的數(shù)字信號,芯片采樣的精度和分辨率以及采樣轉(zhuǎn)換時間是非常重要的技術(shù)參數(shù),它們直接決定著控制速度和控制精度。本控制器中采用的傳感器是一種電渦流位移傳感器。它是一種高精度無接觸式傳感器。
本系統(tǒng)要求能分辨1mm位置信號,根據(jù)傳感器的傳感特性,必須要求有至少為12位的分辨率。同時本系統(tǒng)中要求絕對精度不低于±1LSB。 由于磁力軸承系統(tǒng)要求的控制周期很短(一般小于200ms),故要求ADC的采樣時間也必須很快(一般在20ms內(nèi))。
綜上考慮選用Maxim公司的MAX115作為ADC來完成主軸位置信號的采集。MAX115是12位2×4通道同步采樣逐次比較型ADC,其具有兩組ADC,每組4通道連續(xù)采集保持;單通道轉(zhuǎn)換時間為2ms;轉(zhuǎn)換精度±1/2LSB;4通道傳輸率為16ksps;并且內(nèi)部具有2.5V參考電壓和10MHz時鐘,極大地精簡了外部附加電路;其高速的并行接口可以方便地與DSP相連。
MAX115與TMS320F240
的接口電路
圖1是磁懸浮軸承DSP控制器的結(jié)構(gòu)簡圖。圖中4路主軸位置信號經(jīng)由MAX115進行A/D轉(zhuǎn)換后,采集結(jié)果通過中斷方式輸入到DSP內(nèi)。DSP經(jīng)過濾波算法處理后,將采集數(shù)據(jù)寫到雙口RAM內(nèi),計算機通過ISA總線訪問雙口RAM并將其中的數(shù)據(jù)取走,進行上位機的圖形顯示、數(shù)據(jù)分析等功能。同時DSP進行控制算法計算,計算之后將控制數(shù)據(jù)通過控制器板卡上的4路DAC輸出給功率放大器,從而實現(xiàn)對主軸的控制。這樣,利用DSP處理速度快的特點來完成算法的計算,利用PC機強大的多媒體處理特點來實現(xiàn)主軸位置監(jiān)視和數(shù)據(jù)分析,DSP和PC同時相對獨立工作,互不影響,從而加快了系統(tǒng)的處理速度。
MAX115和DSP硬件的接口設(shè)計如圖2所示,MAX115引腳A0-A3和引腳D0-D11是具有三態(tài)的雙向接口,可以直接和DSP相關(guān)引腳進行連接。為簡化電路設(shè)計和增加可靠性,系統(tǒng)中使用的是內(nèi)部基準電源,此時要將REFIN引腳接上一個0.1mF的旁路電容;同時使用內(nèi)部時鐘10MHz,并將CLK引腳接上VCC。
MAX115與TMS320F240進行接口設(shè)計時主要考慮兩個問題:一是MAX115數(shù)據(jù)線和控制模式線共用問題。由于MAX115的D1/A3,D0/A2為數(shù)據(jù)和地址共用引腳,但實際設(shè)計時不能將此引腳同時連接到DSP的地址線和數(shù)據(jù)線,此處即為DSP和MAX115接口連接的難點。本系統(tǒng)設(shè)計時用一種全新的方法來實現(xiàn),因為DSP有16位的數(shù)據(jù)線,而MAX115只需要12位數(shù)據(jù)線和2根工作模式控制引腳,所以通過將DSP的14根數(shù)據(jù)線直接接到MAX115上的地址和數(shù)據(jù)線,即D0接AD_A0,D1接AD_A1,D2接AD_D0,D3接AD_D1,D4接AD_D2......D13接AD_D11,當對MAX115進行編程時,通過可編程邏輯器件MAX7128進行地址選通,MAX7128編程采用Altera公司的Max+plusⅡ集成環(huán)境,使用AHDL語言編寫。
... ...
MAX115的和信號線由DSP的和分別直接連接即可。通過DSP的數(shù)據(jù)線的D0-D3作為編程地址線從而對其工作模式進行編程。當A/D轉(zhuǎn)換結(jié)束后,要從ADC中讀取數(shù)據(jù),讀到14位數(shù)據(jù)D13-D0時,再將所得數(shù)據(jù)左移2位,即屏蔽掉低2位無效的輸入后,即可得到12位A/D采集數(shù)據(jù)。另一個問題是MAX115與DSP接口的速度匹配問題,由于DSP速度過快,會導致MAX115無法正常工作,所以系統(tǒng)中采用軟件的方法插入等待狀態(tài),具體操作見下文的軟件設(shè)計。
控制器中MAX115的片選()信號、轉(zhuǎn)換開始()信號及讀()寫()信號都是由MAX7128產(chǎn)生的。MAX7128編程方便,易于調(diào)試,用其實現(xiàn)快速地址選通等功能來加快系統(tǒng)的處理速度。其中DSP的參與地址譯碼。
軟件設(shè)計
DSP作為下層的CPU來控制數(shù)據(jù)采集的整個過程。本控制器設(shè)計使用的編程軟件是TI公司的CCS,采用C語言及嵌入式匯編編程,這樣編寫的程序簡潔,易于讀懂。
本控制器采用4通道連續(xù)轉(zhuǎn)換,A3A2A1A0=0011。上電后DSP給MAX115寫入工作方式,然后送信號,A/D轉(zhuǎn)換開始,轉(zhuǎn)換完成后,MAX115發(fā)出請求AD_INT變低,DSP中斷立刻開始讀取A/D轉(zhuǎn)換結(jié)果。MAX115的與DSP的XINT1相連,作為DSP的外部中斷輸入。當A/D轉(zhuǎn)換完成后,變低,DSP進入中斷服務(wù)程序,在中斷服務(wù)程序中將A/D轉(zhuǎn)換結(jié)果讀出。這種方法應(yīng)用于快速轉(zhuǎn)換,只要中斷來了便進行轉(zhuǎn)換,充分利用了CPU的資源。下面給出了中斷方式下DSP控制A/D轉(zhuǎn)換的部分程序。其中主要以中斷子程序為主,其它中斷初始化及其DSP中斷向量程序均省略。
_____ A/D轉(zhuǎn)換電路 _____
data=0X03; /*MAX115工作方式選擇A3A2A1A0=0011*/
asm(" OUT _data,0003h ");
/*選擇ADC,并寫入工作模式*/
asm("rpt XXX ");
/*XXX為一個數(shù)值 其大小應(yīng)根據(jù)實際調(diào)試而決定*/
asm(" nop ");
/*延時 匹配速度*/
asm(" OUT _data,1003h ");
/*A/D轉(zhuǎn)換開始用地址1003h來選中信號*/
_____A/D轉(zhuǎn)換結(jié)果的讀取_____
void AD_INT()
{ asm(" IN _ad_result1,0003h "); /*讀入AD_CH1A轉(zhuǎn)換結(jié)果*/
ad_result1=ad_result1&0x0fff;
ad_result1=ad_result1*2;
/* CH1A通道最后結(jié)果ad_result1*/
asm(" rpt XXX ");
asm(" nop ");
asm(" IN _ad_result2,0003h "); /*讀入AD_CH2A轉(zhuǎn)換結(jié)果*/
ad_result2=ad_result2&0x0fff;
ad_result2=ad_result2*2;
/* CH2A通道最后結(jié)果ad_result2*/
asm(" rpt XXX ");
asm(" nop ");
asm(" IN _ad_result3,0003h "); /*讀入AD_CH3A轉(zhuǎn)換結(jié)果*/
ad_result3=ad_result3&0x0fff;
ad_result3=ad_result3*2;
/* CH3A通道最后結(jié)果ad_result3*/
asm("rpt XXX ");
asm(" nop ");
asm(" IN _ad_result4,0003h "); /*讀入AD_CH4A轉(zhuǎn)換結(jié)果*/
ad_result4=ad_result4&0x0fff;
ad_result4=ad_result4*2;
/* CH4A通道最后結(jié)果ad_result4*/
}
調(diào)試程序時一定要注意MAX115與DSP的時序配合問題,參考Maxim公司的MAX115產(chǎn)品資料,根據(jù)資料所標示出的時序圖來調(diào)試電路。在送A/D工作模式后,再送信號,12ms后MAX115輸出信號,此信號可以作為A/D轉(zhuǎn)換已經(jīng)完成的標志。如果是多通道A/D采集,在讀轉(zhuǎn)換數(shù)據(jù)時,要在讀每通道之間加不小于45ns的延時,這樣才能保證讀出數(shù)據(jù)是可靠真實的模擬信號。
結(jié)語
本文主要探討了12位ADC MAX115與TMS320F240之間的硬件接口電路,并給出了采集程序的流程,在實際的磁懸浮軸承控制系統(tǒng)中采用了中斷采集法,實現(xiàn)了對磁懸浮主軸位置的精確測量,達到了很好的效果。
- 接口設(shè)計(30677)
- 磁懸浮軸(5735)


基于數(shù)字信號處理器和PID控制算法實現(xiàn)磁軸承控制器的設(shè)計
 2664
2664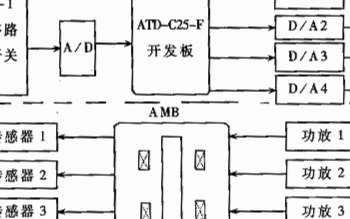
磁懸浮儲能飛輪上的逆變器
7741MAX115
磁懸浮列車
磁懸浮慣性動量輪是由哪些部分組成的?磁懸浮慣性動量輪各部分的功能有哪些?
磁懸浮用線性霍爾元件 磁懸浮霍爾應(yīng)用
磁懸浮科普介紹
CAN總線控制器與DSP的接口
FS50B線性霍爾 磁懸浮產(chǎn)品專用 電壓2.7V-7V
STM32下推式磁懸浮裝置介紹
【EVB-335X-II申請】磁懸浮平臺控制
介紹STM32下推式磁懸浮裝置的PCB設(shè)計思路
基于L298Nah3503控制器的下推式磁懸浮制作材料模塊實現(xiàn)
如何利用MAX115的電網(wǎng)數(shù)據(jù)采集和模/數(shù)轉(zhuǎn)換對已使用多年的系統(tǒng)進行改進?
手工DIY創(chuàng)意磁懸浮陀螺的制作方法圖解
無軸承永磁電機懸浮波動抑制策略
求大神msp430g2launch pad 控制的磁懸浮裝置設(shè)計!
電磁小白求問,磁懸浮電路聯(lián)通有關(guān)問題
誰能教一下磁懸浮玩具的...
近期要做個試驗,求會磁懸浮和電路的大神指教
霍爾元件在磁懸浮技術(shù)上的應(yīng)用與解析
基于力控制的磁懸浮硬盤驅(qū)動器研究
 20
20磁懸浮軸承同步數(shù)據(jù)采集與實時處理系統(tǒng)
11磁懸浮系統(tǒng)機械耦合的研究
15磁懸浮系統(tǒng)機械耦合的研究
8基于電力電子技術(shù)的DSP磁懸浮系統(tǒng)設(shè)計
26EMS型磁懸浮列車模塊懸浮系統(tǒng)的模型參考自適應(yīng)控制
20基于CPLD的飛輪磁懸浮軸承低功耗開關(guān)功率放大器研究
23磁懸浮列車牽引控制的Simulink仿真
27
磁懸浮列車試驗線的電源系統(tǒng)簡介
2857
長定子同步直線電動機電磁設(shè)計在磁懸浮列車中的應(yīng)用
2264
基于TMS320VC33的磁懸浮列車速控系統(tǒng)
2009
帶鋼磁懸浮防抖系統(tǒng)研究
0磁懸浮列車運行控制系統(tǒng)仿真
4961
功率放大器OPA544在主動磁懸浮控制系統(tǒng)中的應(yīng)用
0空間電磁懸浮系統(tǒng)中樣品監(jiān)視系統(tǒng)的研制
16電磁懸浮驅(qū)動器技術(shù)測試分析
11基于磁懸浮球的自適應(yīng)反演滑模控制器
33基于DSP的磁懸浮系統(tǒng)的設(shè)計
23磁懸浮列車原理_磁懸浮列車原理圖解
171552磁懸浮軸承開關(guān)功率放大器數(shù)字單周期控制
27磁懸浮軸承的有哪些類型?如何使用COMSOL軟件來模擬磁懸浮軸承?
13409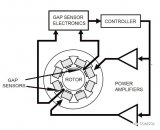
如何制作一個簡易的磁懸浮?
82801磁懸浮陀螺制作方法
22009磁懸浮的原理及制作
148659海爾磁懸浮中央空調(diào)銷量領(lǐng)先 正將磁懸浮行業(yè)帶向一個全新高度
1740基于Multisim仿真的用于磁懸浮系統(tǒng)的新型混合功率放大器設(shè)計概述
2367
如何實現(xiàn)常導和超導磁懸浮演示試驗裝置的控制論文資料概述
17磁懸浮技術(shù)使用的是什么原理磁懸浮實驗原理圖解
62383磁懸浮間隙傳感器在磁懸浮列車中的應(yīng)用原理解析
5734基于工控PC+DSP控制器實現(xiàn)磁懸浮軸承控制系統(tǒng)的設(shè)計
2663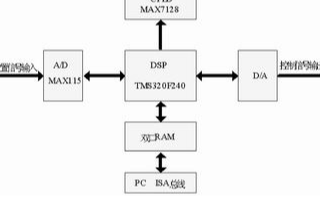
磁懸浮小球控制系統(tǒng)的實驗說明
25磁懸浮列車比高鐵快多少?
11592格力公開磁懸浮床墊相關(guān)專利
2812直線電機磁懸浮列車或落地廣東
1422直線馬達在磁懸浮列車中的應(yīng)用
1290基于DSP的磁懸浮軸承控制器設(shè)計與實現(xiàn)
37基于DSP的立式磁浮軸承控制系統(tǒng)
11基于DSP的單電磁浮列車懸浮控制器
32磁懸浮輸送線系統(tǒng)的特點及應(yīng)用
6420直線電機助力的磁懸浮鼓風機進入調(diào)試運行階段
1943線性霍爾傳感器在磁懸浮產(chǎn)品上的應(yīng)用
3380
磁懸浮輸送系統(tǒng)——誕生與機遇——sTrak
1497
變頻器試驗——國防科大磁懸浮變頻器測試系統(tǒng)
0磁懸浮軸承——電力電子在高速旋轉(zhuǎn)機械領(lǐng)域的應(yīng)用
2894
安泰高壓功率放大器如何研究磁懸浮實驗
455
飛創(chuàng)解讀磁懸浮直線模組:原理、優(yōu)勢與多元應(yīng)用
853
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論