基于STM32F407設計并制作一套簡易旋轉倒立擺及其控制裝置。旋轉倒立擺的結構如圖 1 所 示。電動機 A 固定在支架 B 上,通過轉軸 F 驅動旋轉臂 C 旋轉。擺桿 E 通過轉軸 D 固定
2019-08-26 20:45:23
前一段時間參加了電子設計大賽,做的是旋轉倒立擺,在網上看了看別人的作品,大多數都是簡單的一級倒立擺,現在想嘗試一下做二級倒立擺。看了看該款主控芯片的資源,能滿足該作品的需求,所以最終決定做二級倒立擺,懇請組委會審核!
2013-10-28 10:02:39
正在做一個環形倒立擺(C51單片機控制)!!遇到問題如下 請大家指點迷津{:1:};我用的是10位絕對型倒立擺 ,有10條數據線,輸出格雷碼. 請問這10條數據線是否直接與單片機 IO口相連,連完之后又該如何對這組格雷碼進行檢測并輸出二進制數!!{:21:}大神大神 請幫助一下
2014-07-28 22:03:58
國賽c題的倒立擺題目,大家是選什么材料當轉軸D的?滑輪?滑輪會不會太滑,不好控制?還有什么其他好的材料用轉軸的?
2013-09-05 13:54:37
目錄一、倒立擺系統簡介二、二級倒立擺模型構建三、二級倒立擺的線性化模型四、二級倒立擺的狀態空間模型一、倒立擺系統簡介倒立擺控制系統作為實驗裝置在控制理論領域的教學與科研工作中擔任著不可或缺的角色
2021-09-01 07:14:57
什么是倒立擺?倒立擺該如何去實現呢?
2021-12-23 06:18:33
模糊控制倒立擺程序
2018-10-04 10:42:46
本帖最后由 wherelse 于 2017-6-30 15:46 編輯
板子在手上也有一個多月了,在經過充分的熟悉之后,準備開始著手準備倒立擺項目了。倒立擺作為倒立擺控制系統是一個復雜
2017-06-29 15:59:40
一級倒立擺的Simulink仿真 單級倒立擺穩定控制 直線一級倒立擺系統在忽略了空氣阻力及各種摩擦之后,可抽象成小車和勻質擺桿組成的系統,如圖1所示。m g?桿長為 ?2u圖1 直線一級倒立擺系統圖
2021-09-01 06:45:42
你們做倒立擺時對倒立擺進行建模了嗎?感覺數學水平不夠,建模有點難。但是做倒立擺時對PID的整定不建模怎么辦,就通過不斷的試嗎?有在搞這個的么,求經驗!!
2015-07-29 18:29:44
在調節倒立擺時如何將精密電位器的角度值與電機的pwm調節聯系起來,想通過增量式pid算法調節倒立擺。還有,pid參數調節有沒有相關軟件,麻煩推薦一下。O(∩_∩)O謝謝!!!
2017-07-27 10:47:46
倒立擺分析、建模與仿真引言倒立擺是機器人學中一個非常重要的模型,火箭、導彈、雙足機器人、四足機器人,基本都是倒立擺的變形。問題描述關于倒立擺的問題描述如下:如圖所示的倒立擺系統。擺的關節連接在一個可
2021-09-07 06:59:42
最近需要設計單級倒立擺,可是對此一竅不通,有知道或者設計過的的大神么?求指導!!!
2014-03-22 18:50:20
倒立擺制作全過程最近在練習pid的控制算法,就選用了2013年的電子設計國賽題目:倒立擺。首先給你們看看我的成果注意哦:倒立擺不是靠上面黃色的傳感器保持平衡的,而是通過下面的電機左右扭動使得擺桿不掉
2022-01-14 07:22:02
目錄物理設置創建世界框架和基本配置組裝底盤和推車擺放在一對手推車連接到擺選擇用于控制器和角度轉換的輸出為擺錘和手推車創造原型閉環設置控制器實施物理設置在本節中,我們將展示如何使用Simscape
2021-07-07 06:16:10
小車倒立擺控制能有效反映控制中的許多關鍵問題,如鎮定問題、非線性問題、魯棒性問題、隨動問題及跟蹤問題,因此成為學習自動控制理論,研究自動控制算法較為合適的實驗對象之一。同時,它還具有工程應用背景,為
2020-04-01 07:11:00
怎么用單片機很好控制倒立擺呢
2015-08-01 15:38:31
1 緒論1.1倒立擺系統簡介倒立擺系統是一種很常見的又和人們的生活密切相關的系統,它深刻揭示了自然界一種基本規律,即自然不穩定的被控對象,通過控制手段可使之具有良好的穩定性。倒立擺系統是一個非線性
2021-09-15 07:23:55
#具體操作寫好倒立擺程序的關鍵是確定pid算法的程序和參數值。我根據網上查找的資料寫了用stm32F407控制倒立擺的pid程序,現在我將程序分享給大家。我的程序主要是根據位置式離散pid公式pwm
2022-01-14 07:33:37
一、倒立擺系統的研究目的和意義倒立擺控制系統(InvertedPendulumSystem簡稱IPS)是一個復雜的、不穩定的、非線性系統,是進行控制理論教學及開展各種控制實驗的理想實驗平臺。倒立擺
2021-09-01 07:04:20
簡易旋轉倒立擺及控制裝置中如何使直流電機加快轉速?
2013-09-04 16:01:18
簡易旋轉擺倒立控制裝置報告中的擺桿狀態檢測,是要測什么啊?!具體點
2013-09-05 10:10:13
萌新求助,求大佬分享一級倒立擺MATLAB仿真程序
2021-11-01 07:32:44
請問一下倒立擺系統的原理是什么?
2021-10-29 07:05:38
想學習倒立擺,誰有程序借來學習學習
2015-06-09 08:29:17
全國計算機二級試題含有從,二級筆試試題BASIC,筆試試題FORTRAN,1994-2002年的二級C、二級Pascal、二級QBasic、二級Fortran、二級Foxbase筆試試題。非常的豐富和詳多。
2008-12-30 10:20:55 27
27 本文通過拉格朗日方程推導出環形一級倒立擺系統的數學模型,用能量方法對該模型進行擺起控制;在倒立擺成功擺起后,在倒立平衡點對系統模型進行線性化,并用線性二次型
2009-05-25 15:07:0220 本文通過拉格朗日方程推導出環形一級倒立擺系統的數學模型,用能量方法對該模型進行擺起控制;在倒立擺成功擺起后,在倒立平衡點對系統模型進行線性化,并用線性二次
2009-05-25 15:36:0126 為了有效解決倒立擺實驗教學中器材相對不足,設計開發了基于計算機網絡的倒立擺遠程控制系統。它由實驗用戶、中心服務器、實驗服務器和實驗設備等四層組成,運用功能強
2009-06-01 14:23:0314 本文以倒立擺控制系統控制為例,介紹Borland C++ Builder 在數據采集、處理中的應用,并根據系統控制算法控制電機左右運動,從而保證倒立擺能穩定地站立在豎直位置。關鍵詞: C
2009-06-15 09:26:3127 針對單級倒立擺系統的單輸入雙輸出、強非線性、強耦合的不穩定系統,提出了雙回路PID 控制方案。通過仿真試驗研究了雙回路PID 多種組合控制方案的可行性,并選出最佳方案——
2009-06-17 09:34:2833 本文提出了一種基于數據融合的模糊控制器設計方法,該方法運用最優控制方法設計融合函數,降低模糊控制器的輸入變量維數,大大減少了模糊控制的規則數,成功的解決了模
2009-06-19 11:21:0214 本文簡要說明了二級倒立擺系統及其建模,并分析了這個系統的特點。著重于建立一個單片機系統,在狀態反饋的基礎上實現對倒立擺的控制。關鍵詞:倒立擺 單片機 狀態反饋
2009-06-26 10:32:1349 本文研究具有柔性連接的倒立擺系統的動力學特性,通過數學分析提出應用線性二次型最優控制策略設計狀態反饋控制器,利用降階狀態觀測器獲得不易測量的振動小車位置,控制
2009-07-07 15:00:3923 研究基于動態查詢表的模糊控制策略及其在轉臂式倒立擺中的應用Z 采用一種新的倒立擺系統的控制方法, 將傳感器檢測的倒立擺的兩個角度信息傳送到控制器, 控制器利用該信息的
2009-07-15 09:01:2022 本文在MATLAB 環境下建立了二級倒立擺的半物理實時仿真模型,并應用線性二次型最優控制策略,設計了一個二級倒立擺LQR 控制器。在實驗中,運行該半實物仿真模型,成功的
2009-07-31 08:51:3127 本文介紹了一種基于SPCE061A 單片機的二級倒立擺控制系統。主要闡述了狀態空間法在本系統中的應用以及功能設計,并簡要介紹了系統的軟件設計思路。關鍵詞:單片機; 狀
2009-08-04 08:42:0925 針對倒立擺的非線性采用T-S模糊控制的方法對倒立擺進行控制,建立了倒立擺的數學模型,并用Matlab 進行了仿真,仿真結果表明該控制方法對倒立擺具有好的控制效果。關鍵
2009-08-10 09:39:3215 倒立擺控制系統是一個典型的高階次、不穩定、多變量、非線性和強藕合控制系統。本文研究對象是基于研華公司數據采集卡PCI—1710—B 的倒立擺控制系統。通過對一級倒立擺系統
2009-08-15 08:13:4525 本文針對LQR 控制在單級倒立擺控制中的不足,設計了一個LQR 結合PID 的復合控制。并在Borland c 語言環境下編寫控制程序,成功實現倒立擺的控制,其控制效果比單一LQR控制的抗擾
2009-08-15 10:54:1621 選用 LabVIEW 作為倒立擺控制系統的界面設計開發工具。為了在LabVIEW 圖形化編程環境下使用倒立擺控制器Windows 環境下的動態鏈接庫,本文將動態鏈接庫中的函數全部轉換設計為在LabV
2009-08-26 09:40:3527 提出了利用TS-PID 對單級小車倒立擺進行控制的方法,并且對TS-PID 控制器進行了簡要的理論分析,最后利用matlab 的simulink 工具對該控制系統進行了仿真,其結果表明該控制方法可行
2009-08-31 08:20:2720 倒立擺控制系統是一個典型的高階次、不穩定、多變量、非線性和強藕合控制系統。本文研究分析了單節倒立擺控制系統的數學模型,介紹了線性二次型最優調節器(LQR)的基本原
2009-09-02 16:38:2724 利用Lagrange 方程建立了系統的動力學方程,對n 級倒立擺系統的建模問題進行了具體研究,經過嚴密的數學推導,給出了n 級倒立擺系統建模的基本過程,獲得了一組可普遍性地描
2009-12-14 13:55:4916 針對一級倒立擺系統,基于局部反饋線性化方法將系統的動力學轉換為便于控制器設計的級聯系統模型,并利用線性矩陣不等式設計了滿意PID 控制器。實驗結果表明,該方案實現
2010-01-18 15:22:1213 倒立擺是控制領域中典型的被控對象。本文通過智能控制算法實現倒立擺的起擺控制。當擺桿的角度進入穩定區域時,通過PID控制算法使擺桿穩定。整個控制過程由基于DSP(Digital Sig
2010-08-05 15:24:5729 針對多輸入多輸出的倒立擺系統平衡控制,利用牛頓-歐拉方法建立了直線型一級倒立擺系統的數學模型。在分析的基礎上,采用狀態反饋控制中極點配置法設計了用于直線型一級
2010-12-17 16:28:020 倒立擺系統是多變量、非線性、強耦合的控制系統。采用模糊控制理論研究二級倒立擺控制問題。運用最優控制方法設計融合函數以降低模糊控制器的維數,減少模糊控制規則數,
2010-12-29 17:29:0846 引言
倒立擺系統在控制理論研究中是一種較為理想的實驗裝置。倒立擺系統可以用多種理論和方法來實現其穩定控制,如PID、自適應、狀態反饋、智
2009-01-01 21:05:33 902
902 
概述
倒立擺控制系統是一個復雜的、不穩定的、非線性系統,是進行控制理論教學及開展各種控制實驗的理想實驗平臺。對倒立擺系統的研究能有效的反映控制中
2010-08-05 15:26:581763 倒立擺系統是一種典型的非線性、多變量、不穩定系統,目前,對于這種復雜對象的控制問題在控制領域具有十分重要的研究價值。針對此種非線性系統的控制問題,提出一種智能控制方法來解決這個問題。通過應用神經網絡控制和模糊控制相結合的方式,集合二者的優
2011-01-15 16:47:4346 本文利用拉格朗日方程建立了直線一級倒立擺控制系統的數學模型,在此基礎上分析了該系統的性能,并利用LQR控制器進行控制。結果表明,LQR控制器對該系統具有良好的控制作用
2011-03-31 10:38:328866 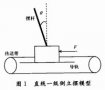
固高科技的環形倒立擺系列產品采用開放的控制解決方案和模塊化的實驗平臺,以旋轉運動模塊為基礎平臺,輕松構建環型一級倒立擺,環形串聯兩級倒立擺、環形并聯兩級倒立擺,甚至
2011-04-05 22:30:30136 墓于 視覺伺服 的倒立擺系統可為機器視覺和智能控制領域的研究提供一個很好的實驗平臺。對該實驗平臺的視覺采集系統、運動控制系統和系統軟件結構進行了詳細的介紹, 對各組成部
2011-06-28 11:01:1534 對一維 倒立擺 系統的穩定和起擺進行了深入研究。通過$% 理論對系統進行坐標和輸入量的變換,實現了系統的局部線性化,使得倒立擺系統的穩定控制不再需要對數學模型中的非線性
2011-07-06 17:59:0041 本文詳細地闡述了 倒立擺 系統及其在自動控制領域中的應用
2011-07-06 18:00:2257 闡述了 倒立擺 實驗系統及其在自動控制領域中的應用
2011-07-06 18:02:0353 針對 倒立擺 的起擺控制建立了環形單級倒立擺基于拉格朗日方程的運動方程,在此基礎上提出了能量控制的概念,并將能量補償控制應用在環形單級倒立擺系統上,仿真和實際控制結果表
2011-07-06 18:03:4967 在對 二級倒立擺 系統的動力學方程進行建模的基礎上將其轉化為線性定常系統的狀態控制問題,提出了基于matlab的二級倒立擺控制系統
2011-07-06 18:05:25111 在 智能控制 系統分層遞階結構的基礎上,結合倒立擺的特點,根據被控對象的不同情況,分別采用了不同的看法,提出了基于分層遞階智能控制的倒立擺研究
2011-07-06 18:07:3625 倒立擺 系統是一個復雜的!非線性的!不穩定的高階系統 倒立擺的控制一直是控制理論及應用的典型課題分析了如何利用拉格朗日方程對直線柔性連接兩級倒立擺系統建模采用法設計最優
2011-07-06 18:17:2242 倒立擺 系統是一個復雜的非線性系統本文建立了倒立擺的一種非線性數學模型在分析的基礎上為倒立擺系統設計了一種模糊控制方案我們對一級倒立擺系統進行了控制取得了較好的效果
2011-07-06 18:19:4856 為了實現一級倒:芷擺系統自擺起和穩定控制,該文采用了最優控制與PID控制相結合的控制方法。首先,采用BangBang控制理論設計開環時間最優控制器,實現倒立擺的平穩快速擺起,同
2012-01-18 15:00:3492 為實現二級倒立擺系統的實時穩定控制,以深圳固高直線二級倒立擺裝置作為控制對象,在MATLAB環境下,利用基于二次型最優控制理論的線性二次型(Linear Quadratic Regulator,LQR)最優控制器
2012-01-18 15:07:3053 本文建立一級倒立擺的數學模型,闡述了變速積分的PID優點,對一級倒立擺的變速積分的PID控制進行仿真,對比傳統PID控制有明顯的性能改進。
2012-02-03 17:14:5073 利用stm32控制平板倒立擺使用了紅外遙控,pwm控制,串口調試角加速度傳感器,里面就是代碼。
2012-07-24 17:39:33209 倒立擺系統是一種典型的控制系統模型,能夠將實際與理論相結合,可以開發出新的控制算法來應用在系統模型之上。采用模糊控制算法研究二級倒立擺系統的控制問題,設計模糊控制
2012-08-29 15:04:08111 基于MATLAB的模糊控制倒立擺系統研究,感興趣的可以下載看看。
2015-11-03 13:49:5836 移動的倒立擺!資料來源網絡,如有侵權,敬請見諒
2015-11-20 15:39:400 倒立擺控制系統是一個復雜的、不穩定的、非線性系統,是進行控制理論教學及開展各種控制實驗的理想實驗平臺。對倒立擺系統的研究能有效的反映控制中的許多典型問題:如非線性問題、魯棒性問題、鎮定問題、隨動問
2015-12-11 11:06:5214 為進行性線控制器的設計首先需要對被控制系統進行建模.二級倒立擺系統數學模型的建立
2016-06-14 15:29:5616 旋轉倒立擺源程序,有興趣可以看看的。
2016-07-15 16:03:0938 本文介紹了一種簡易環形倒立擺控制系統的設計實現
2016-08-23 16:27:2420 一級倒立擺的PID控制設計
2016-11-08 18:51:1665 模糊趨近律滑模變結構的二級倒立擺系統控制仿真_張志強
2017-01-30 23:17:311 基于變量分組模糊控制算法的倒立擺系統_魏勝男
2017-03-16 08:00:000 基于STM32的倒立擺系統
2017-04-08 08:55:1917 STM32,倒立擺
2017-07-29 14:38:5619 通過對一階旋轉倒立擺系統原理的分析,選用單片機作為控制器,直流電機作為執行器,電位器式角度傳感器作為反饋環節,采用PID控制算法設計實現了一階旋轉倒立擺控制系統。實驗結果表明該系統在穩定的基礎上具有
2017-10-19 15:21:0959 進行控制,而且還能影響衛星的飛行姿勢。因此,倒立擺的研究在理論突破和實踐應用等方面具有重要意義。 起擺控制和穩定控制是學術界對倒立擺研究的兩大內容。所謂起擺控制就是倒立擺從初始位置進行運動達到指定工作位置的
2017-11-09 14:50:5625 基于塔吊吊物的高效運行和安全性為目的,采用了一種基于模糊PID控制的算法來進行塔吊消擺。通過塔吊防擺控制系統的模糊PID控制器對小車移動的位移進行控制,同時用模糊控制算法對擺角進行控制,即控制塔吊變
2017-11-13 10:17:1313 倒立擺控制系統(InvertedPendulumSystem簡稱IPS)是一個復雜的、不穩定的、非線性系統,是進行控制理論教學及開展各種控制實驗的理想實驗平臺。對倒立擺系統的研究能有效的反映控制中
2017-11-27 16:36:0258838 倒立擺的matlab仿真
2018-01-02 20:00:5063 倒立擺PID算法源代碼參考
2018-01-09 17:02:0720 ,機器人行走過程中的平衡控制等,故倒立擺系統控制實驗己成為控制理論界學者研究的熱點。倒立擺控制系統是進行控制理論教學及開展各種控制實驗的理想實驗平臺,其作為典型的非線性、強耦合、多變量控制系統,要求控制系統應
2018-02-04 11:25:280 針對存在模型參數不確定性和外部擾動的直線型二級倒立擺系統的穩擺控制問題,對如何實現倒立擺系統魯棒穩定的同時,還保證其達到期望的最優控制性能和H性能指標的穩定性控制問題進行了研究。基于狀態反饋
2018-03-06 14:11:581 自動起擺控制器Swing-up Controller能夠控制直線一級倒立擺由靜止下垂的穩定平衡狀態自動轉化到豎直向上的不穩定平衡狀態,而無需給擺桿施加力的作用,就可以實現擺桿的自動擺起。
2019-08-23 08:05:0010512 
本文檔的主要內容詳細介紹的是PID參數如何設定調節及倒立擺說明匯總與倒立擺程序免費下載
2019-10-29 08:00:008 倒立擺系統在控制理論研究中是一種較為理想的實驗裝置。倒立擺系統可以用多種理論和方法來實現其穩定控制,如PID、自適應、狀態反饋、智能控制、模糊控制及人工神經元網絡等多種理論和方法,都能在倒立擺
2020-05-03 10:29:002137 
建立直線一級倒立擺的仿真模型如圖3所示。“GLlIPState—Space”為直線一級倒立擺的狀態空間模型。雙擊圖3中的“Poles Control”模塊,打開圖4中的設置窗口。
2020-05-03 18:11:008089 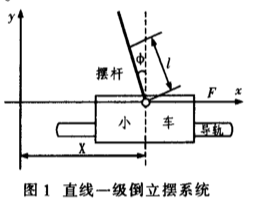
#具體操作寫好倒立擺程序的關鍵是確定pid算法的程序和參數值。我根據網上查找的資料寫了用stm32F407控制倒立擺的pid程序,現在我將程序分享給大家。我的程序主要是根據位置式離散pid公式pwm
2022-01-14 11:26:554 倒立擺制作全過程最近在練習pid的控制算法,就選用了2013年的電子設計國賽題目:倒立擺 。首先給你們看看我的成果注意哦:倒立擺不是靠上面黃色的傳感器保持平衡的,而是通過下面的電機左右扭動使得擺桿
2022-01-14 11:28:5621 倒立擺作為一種典型的控制系統實驗裝置,具有非線性、自然不穩定等特性,常用來作為檢驗某種控制理論或方法是否合理的典型方案。一階倒立擺系統能用多種理論和方法來實現其穩定控制,如PID、自適應、狀態反饋、模糊控制及人工神經元網絡等多種理論和方法都能在倒立擺系統控制上得到實現。
2022-02-10 11:46:563 倒立擺系統的整定是自動控制理論中的典型問題,在網路上或者書籍中可以找到不少相關的資料知識,整定算法也多式多樣,模糊PID、LQR、以及本文用到的PID等。
2023-12-08 14:05:496517 
 電子發燒友App
電子發燒友App


















 工商網監
工商網監
評論