解決方案創(chuàng)新公司,宣布推出其 Flash CMOS 圖像傳感器系列,該系列專(zhuān)為 3D 激光輪廓分析/位移分析應(yīng)用和高速、高分辨率檢測(cè)量身定制。
2019-10-03 09:37:00 6734
6734 激光三角測(cè)距法作為低成本的激光雷達(dá)設(shè)計(jì)方案,可獲得高精度、高性價(jià)比的應(yīng)用效果,并成為室內(nèi)服務(wù)機(jī)器人導(dǎo)航的首選方案,本文將對(duì)激光雷達(dá)核心組件進(jìn)行介紹并重點(diǎn)闡述基于激光三角測(cè)距法的激光雷達(dá)原理。
2023-12-27 18:20:332376 
過(guò)程中,它常用激光作為光源,用CCD相機(jī)作為檢測(cè)器。這種方式主要用于工業(yè)勘探、工件表面粗糙度檢測(cè)、輪胎檢測(cè)、飛機(jī)檢測(cè)等工業(yè)、航空、軍事領(lǐng)域,在消費(fèi)電子類(lèi)產(chǎn)品還不曾涉及。 基于激光三角法測(cè)量系統(tǒng)簡(jiǎn)圖
2020-12-01 15:08:04
瞬時(shí)改變接收光強(qiáng)。傳感器探頭到被測(cè)物體的距離可以由三角計(jì)算法則精確得到。采用這種方法能夠得到微米級(jí)的分辨率。根據(jù)不同型號(hào),測(cè)量得到的數(shù)據(jù)會(huì)由外置或內(nèi)置控制器通過(guò)多種接口進(jìn)行評(píng)估。點(diǎn)激光傳感器投射到被
2018-09-11 10:49:40
最新在學(xué)習(xí)PWM電流跟蹤這塊,有個(gè)在APF中常用的三角波比較法PWM跟蹤算法,我的程序思路是設(shè)置2812計(jì)數(shù)器增減計(jì)數(shù),上溢中斷和下溢中斷,在中斷中采樣輸出電流,然后和電流指令信號(hào)比較,經(jīng)PI控制器
2015-09-25 15:02:04
如何測(cè)量三角波的占空比,有什么方案可以把三角波的占空比轉(zhuǎn)換成方波的占空比?
2014-07-25 22:49:36
簡(jiǎn)介:介紹了機(jī)器人中常用的傳感器的原理。包括:紅外傳感器,超聲波傳感器,陀螺儀,GPS,電子羅盤(pán),激光傳感器,編碼盤(pán)以及多普勒傳感器。同時(shí)也介紹了TOF 測(cè)量法和三角測(cè)量法。關(guān)鍵字:傳感器,紅外傳感器
2012-07-11 09:28:06
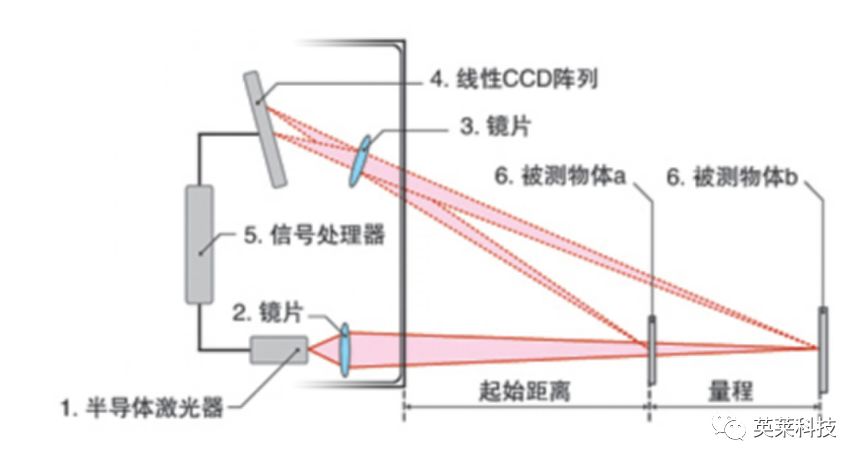
``德國(guó)米銥激光三角反射式傳感器原理激光三角反射式測(cè)量原理基于簡(jiǎn)單的幾何關(guān)系。激光二極管發(fā)出的激光束被照射到被測(cè)物體表面。反射回來(lái)的光線通過(guò)一組透鏡,投射到感光元件矩陣上,感光元件可以是CCD
2018-03-07 17:48:40
個(gè)像素組成的,先進(jìn)的激光傳感器是基于光學(xué)三角測(cè)量原理工作的,其結(jié)合了線性成像器。線性圖象用于精確測(cè)量被測(cè)物在傳感器前方的位置,最終實(shí)現(xiàn)精確、穩(wěn)定的測(cè)量。激光發(fā)射器將可見(jiàn)激光透過(guò)透鏡,射向被測(cè)物體。激光
2021-02-20 11:44:52
激光測(cè)距傳感器是新一代的測(cè)距設(shè)備,功能強(qiáng)大、堅(jiān)固耐用,專(zhuān)為工業(yè)測(cè)量市場(chǎng)設(shè)計(jì)。該設(shè)備擁有許多卓越的性能,是一種當(dāng)前最為先進(jìn)的經(jīng)濟(jì)型在線位置檢測(cè)系統(tǒng),具有驚人的測(cè)試精度和極高的穩(wěn)定性。
2020-03-17 09:01:34
到高速或者重要路口的龍門(mén)架上,激光發(fā)射和接收垂直地面向下,對(duì)準(zhǔn)一條車(chē)道的中間位置,當(dāng)有車(chē)輛通行時(shí),激光測(cè)距傳感器能實(shí)時(shí)輸出所測(cè)得的距離值的相對(duì)改變值,進(jìn)而描繪出所測(cè)車(chē)的輪廓。這種測(cè)量方式一般使用測(cè)距
2018-11-12 11:07:16
激光位移傳感器能夠利用激光的高方向性、高單色性和高亮度等特點(diǎn)可實(shí)現(xiàn)無(wú)接觸遠(yuǎn)距離測(cè)量。激光位移傳感器(磁致伸縮位移傳感器)就是利用激光的這些優(yōu)點(diǎn)制成的新型測(cè)量儀表,它的出現(xiàn),使位移測(cè)量的精度、可靠性得到極大的提高,也為非接觸位移測(cè)量提供了有效的測(cè)量方法。
2020-03-26 06:01:37
激光輪廓傳感器采用激光三角反射式原理,實(shí)現(xiàn)物體任一輪廓線尺寸測(cè)量,如高度差、寬度、角度、半徑等,也可以實(shí)現(xiàn)缺陷檢測(cè)、外觀尺寸掃描、表面特征跟蹤等功能。速度快、精度高、非接觸,易安裝、可同時(shí)測(cè)量一
2020-12-09 14:12:04
Dimetix AG致力于為各種需要多用途測(cè)距傳感器、激光傳感器的行業(yè)提供設(shè)備。基于徠卡測(cè)量系統(tǒng)許可使用的DISTO技術(shù),Dimetix開(kāi)發(fā)的激光測(cè)距設(shè)備特別適用于工業(yè)環(huán)境。近日,Dimetix
2018-10-24 14:09:11
(infrared emitting diode)以及信號(hào)處理電路三部分組成。由于采用了三角測(cè)量的方式,被測(cè)物體的材質(zhì)、環(huán)境溫度以及測(cè)量時(shí)間都不會(huì)影響測(cè)量精度。傳感器輸出電壓值對(duì)應(yīng)探測(cè)距離。通過(guò)測(cè)量電壓...
2022-01-24 07:28:42
測(cè)距傳感器 激光測(cè)距傳感器 激光測(cè)距儀 LDM4x 激光測(cè)距離傳感器 真尚有科技旗下的LDM4x系列測(cè)距傳感器用途廣泛,如集裝箱定位、大型工件裝配定位、江河湖海的水位測(cè)量等。LDM4x系列測(cè)距傳感器
2014-06-23 23:01:10
比較全的傳感器產(chǎn)品介紹 激光測(cè)距傳感器獲取距離信息。當(dāng)激光投射到障礙物上時(shí),會(huì)在傳感器里形成光斑。同時(shí),圖像傳感器會(huì)根據(jù)光斑的像素序號(hào)來(lái)計(jì)算到激光測(cè)距傳感器的中心距離。全向壓力傳感器LDS激光測(cè)距傳感器上蓋配備全向壓力傳感器,頂面360度全方位靈敏感應(yīng)輕微碰撞,防止機(jī)器人上方卡住。超聲波傳感器...
2021-09-14 07:44:50
°C 時(shí)的典型使用壽命為 50000 h光源類(lèi)型調(diào)制可見(jiàn)紅光激光額定值激光等級(jí)2波長(zhǎng)650 nm光斑表示大約 1,5 mm x 3 mm 當(dāng) 100 mm測(cè)量方法激光三角測(cè)量分辨率< 0.1
2021-08-31 14:32:29
baumer激光測(cè)距傳感器獨(dú)特應(yīng)用BAUMER堡盟的創(chuàng)新型多點(diǎn)測(cè)量原理以光切法為基礎(chǔ)。該傳感器可記錄多達(dá)600個(gè)測(cè)量值,然后基于智能分析計(jì)算出被測(cè)物體的距離。它每秒鐘可采集500個(gè)距離測(cè)量值,分辨率
2018-04-27 12:32:51
optoNCDT2300 系列傳感器是德國(guó)米銥公司激光三角反射式傳感器中的高端產(chǎn)品。非常適合高速應(yīng)用,如監(jiān)測(cè)震動(dòng)或者復(fù)雜表面的測(cè)量。 該傳感器不僅適合漫反射表面,還同樣適合鏡面表面。 通過(guò)多峰值測(cè)量
2014-11-10 17:23:11
距離]1 mm [650 mm]測(cè)量數(shù)據(jù)測(cè)量范圍50 ... 650 mm分辨率0.1 mm精度1 %精度參考值測(cè)量距離再現(xiàn)性(1σ)0.1 mm參考否光學(xué)測(cè)距原理光三角測(cè)量電氣數(shù)據(jù)性能數(shù)據(jù)供電電壓
2022-01-07 13:46:17
(Range-Free)的兩類(lèi)定位算法,基于距離的定位算法通過(guò)測(cè)量節(jié)點(diǎn)間點(diǎn)到點(diǎn)的距離或角度信息,使用三邊測(cè)量法、三角測(cè)量法或最大似然估計(jì)法等計(jì)算節(jié)點(diǎn)位置,主要有RSSI、TOA、TDOA、AOA等。距離無(wú)關(guān)的定位算法
2020-08-28 06:07:05
29 毫米、每層 70 匝的 2 層 PCB 線圈作為傳感器線圈。之所以選擇該線圈,是因?yàn)樗闹睆匠^(guò)了該形狀目標(biāo)的最寬部分。圖 1 是我在該實(shí)驗(yàn)中使用的線圈和三角銅帶目標(biāo)。圖 1:…
2022-11-22 06:59:58
工業(yè)激光測(cè)距傳感器跟一般的測(cè)距儀的區(qū)別是什么?
2015-08-21 10:10:08
可視玻璃厚度傳感器,采用了激光三角測(cè)量網(wǎng)并以高達(dá)每秒2000個(gè)讀數(shù)的速度測(cè)量厚達(dá)1.5mm的玻璃板,以及厚達(dá)3.0mm的其它平板玻璃。此種傳感器對(duì)于厚度與距離的在線/離線測(cè)量而言,是理想的。無(wú)論是固定
2018-11-19 15:11:50
間接測(cè)量法的原理是什么?間接測(cè)量法的工作工程是怎樣的?
2021-05-27 06:22:02
小體積高性能激光測(cè)距傳感器:100khz高速測(cè)量,精度0.7mm,距離0-300m
2019-07-27 19:41:16
從理論和應(yīng)用兩方面分析了三角法激光測(cè)量系統(tǒng)的誤差,得出:定點(diǎn)標(biāo)定和插值可以消除光學(xué)放大率隨測(cè)量點(diǎn)位置變化的影響;雙光路方案或標(biāo)準(zhǔn)點(diǎn)校準(zhǔn)方法可以消除光線路徑隨環(huán)
2009-06-25 08:31:30 30
30 基于光纖傳感技術(shù)和三角測(cè)量方法,提出了一種用于曲面檢測(cè)的新型光纖三角傳感器。根據(jù)所設(shè)計(jì)的輪輻式接收光纖結(jié)構(gòu),可以在測(cè)量曲面與傳感頭間位移時(shí),首先獲取被測(cè)點(diǎn)處微面元
2009-07-17 08:25:4713 【摘 要】 敘述了激光三角法測(cè)厚的原理,對(duì)板材在線測(cè)厚系統(tǒng)進(jìn)行了硬件設(shè)計(jì)和軟件設(shè)計(jì)并給出了系統(tǒng)測(cè)量指標(biāo)。
2009-05-16 19:47:283158 
激光位移傳感器原理之激光三角測(cè)量法原理:
激光發(fā)射器通過(guò)鏡頭將可見(jiàn)紅色激光射向被測(cè)物體表面,經(jīng)物體反射的激光通過(guò)接收器鏡頭,被內(nèi)部的CCD線性相機(jī)接收,根據(jù)不同的距離,CCD線性相機(jī)可以在
2018-10-17 08:54:0011519 激光三角法測(cè)距傳器的
2011-01-07 17:24:1499 激光三角反射式位移傳感器 - 非接觸、無(wú)磨損 - 安裝距離大 - 測(cè)量光斑小 - 高頻率 - 高精度 - 幾乎適用于任何表面 激光二極管在被測(cè)物體表面上投射一個(gè)可見(jiàn)光斑,其反射光(漫反射)通過(guò)精密的接受光鏡組后,在感光片上成像。當(dāng)傳感器與被測(cè)物體間的距離發(fā)生
2011-01-28 23:40:3483 為了正確反映基于光電位置敏感器(PSD)的微位移傳感器的特性,首先介紹了一維光電位置敏感器的工作原理并分析了利用PSD結(jié)合光學(xué)三角測(cè)量法將位移信號(hào)轉(zhuǎn)換成電壓信號(hào)的工作原理,
2012-07-11 14:24:090 一種大范圍激光三角測(cè)距傳感器的標(biāo)定方法,下來(lái)看看
2017-01-02 19:33:2812 和精度,但是在實(shí)際試驗(yàn)中存在局限性:試驗(yàn)條件苛刻,實(shí)際可控程度不高(環(huán)境光照、飛機(jī)起飛滑跑距離不確定等);后者盡管能確保測(cè)距傳感器激光束始終與地面垂直以獲得精確的測(cè)量值,然而受本型飛機(jī)氣動(dòng)布局限制,且在重構(gòu)
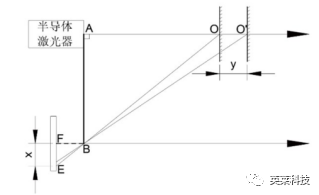
2017-11-08 10:59:289 三角測(cè)量的基本原理,半導(dǎo)體激光發(fā)出的激光束照射在目標(biāo)上。接受器透鏡集目標(biāo)反射的光線并聚焦到感光元件上。當(dāng)與目標(biāo)之間的距離發(fā)生改變時(shí),通過(guò)接收器透鏡的反射光的角度會(huì)隨之改變,光線聚焦在感光元件上的位置也有所不同。
2018-01-08 10:51:2425 目前,激光位移傳感器按照原理可分為激光三角測(cè)量法和激光回波分析法兩種,其中激光三角測(cè)量法適用于高精度、短距離的測(cè)量,激光回波分析法則用于遠(yuǎn)距離測(cè)量。在當(dāng)前的工業(yè)機(jī)器人應(yīng)用中,通常采用三角測(cè)量法,這種方法最高線性度可達(dá)1um,分辨率可達(dá)到0.1um的水平。
2018-10-22 17:09:101460 激光位移傳感器可以測(cè)量位移、厚度、振動(dòng)、距離、直徑等精密的幾何測(cè)量。激光有直線度好的優(yōu)良特性,同樣激光位移傳感器相對(duì)于我們已知的超聲波傳感器有更高的精度。但是,激光的產(chǎn)生裝置相對(duì)比較復(fù)雜且體積較大,因此會(huì)對(duì)激光位移傳感器的應(yīng)用范圍要求較苛刻。
2018-12-05 14:35:239202 
GP2Y0A21YK0F是一種距離測(cè)量傳感器單元,由PSD(位置靈敏探測(cè)器)、IRED(紅外發(fā)光二極管)和信號(hào)處理電路集成組成。由于采用了三角測(cè)量法,物體的反射率、環(huán)境溫度和工作持續(xù)時(shí)間的變化不易對(duì)距離檢測(cè)產(chǎn)生影響。該裝置輸出對(duì)應(yīng)于檢測(cè)距離的電壓。因此,該傳感器也可以用作接近傳感器。
2018-12-06 08:00:00204 激光位移傳感器可以測(cè)量位移、厚度、振動(dòng)、距離、直徑等精密的幾何測(cè)量。激光有直線度好的優(yōu)良特性,同樣激光位移傳感器相對(duì)于我們已知的超聲波傳感器有更高的精度。但是,激光的產(chǎn)生裝置相對(duì)比較復(fù)雜且體積較大,因此會(huì)對(duì)激光位移傳感器的應(yīng)用范圍要求較苛刻。
2019-01-09 14:33:2615086 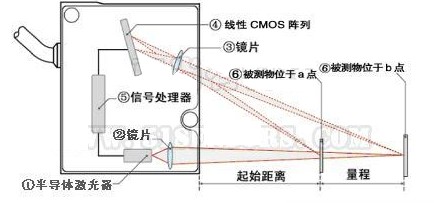
檢查立體形狀的方法一般為三角測(cè)量法。已經(jīng)開(kāi)發(fā)了利用三角測(cè)量法檢出焊料引線部的截面形狀的裝置。然而因?yàn)?b class="flag-6" style="color: red">三角測(cè)量法是從光入射的不同方向進(jìn)行觀測(cè),本質(zhì)上在對(duì)象物面為光擴(kuò)散性的情況下,這種方法最適宜。焊料面接近于鏡面條件的情況下,這種方法不適宜。
2019-08-12 15:36:204342 
ADI的專(zhuān)有光子技術(shù)支持一種全新的物體位置和三角測(cè)量方法,為距離檢測(cè)的范圍和時(shí)間提供一種切實(shí)可行的替代方案,并且具備強(qiáng)大的噪音性能和環(huán)境光抗擾度。
2019-06-24 06:08:002383 檢查立體形狀的方法一般為三角測(cè)量法。已經(jīng)開(kāi)發(fā)了利用三角測(cè)量法檢出焊料引線部的截面形狀的裝置。然而因?yàn)?b class="flag-6" style="color: red">三角測(cè)量法是從光入射的不同方向進(jìn)行觀測(cè),本質(zhì)上在對(duì)象物面為光擴(kuò)散性的情況下,這種方法最適宜。焊料面接近于鏡面條件的情況下,這種方法不適宜。
2019-05-22 14:38:461106 【工程師小貼士】二維三維傳感器開(kāi)發(fā)大不同?細(xì)小電阻值測(cè)量法大公開(kāi)
2019-07-12 16:17:412560 【工程師小貼士】二維三維傳感器開(kāi)發(fā)大不同?低阻值四線測(cè)量法大公開(kāi)
2019-07-12 16:17:412822 檢查立體形狀的方法一般為三角測(cè)量法。已經(jīng)開(kāi)發(fā)了利用三角測(cè)量法檢出焊料引線部的截面形狀的裝置。
2019-08-21 15:42:16699 激光測(cè)距傳感器技術(shù)按照測(cè)程分為絕對(duì)距離測(cè)量法和微位移測(cè)量法。按照測(cè)距方法細(xì)分,絕對(duì)距離測(cè)距法主要脈沖式激光測(cè)距和相位式激光測(cè)距,微位移測(cè)量法主要有三角法激光測(cè)距和干涉法激光測(cè)距。
2019-09-26 09:02:124165 本文檔的主要內(nèi)容詳細(xì)介紹的是激光束指向控制激光三角位移傳感器的研制PPT課件免費(fèi)下載主要內(nèi)容包括了:LTD簡(jiǎn)介,激光抖動(dòng)對(duì)LTDS測(cè)量精度的影響,測(cè)量方法,實(shí)驗(yàn)測(cè)試,結(jié)論
2019-11-20 08:00:005 距離測(cè)量是基于三角測(cè)量原理。激光束打在物體上形成一個(gè)小點(diǎn),傳感器(光電二極管陣列)的接收器對(duì)該點(diǎn)的位置進(jìn)行探測(cè)。入射角隨距離而變化,因而激光點(diǎn)在接收器上的位置也相應(yīng)變化。
2020-04-14 15:33:074881 如圖3所示。由圖3可知,三角形質(zhì)心算法比三邊測(cè)量法,定位精度更高,當(dāng)測(cè)距誤差變大時(shí),用三角形質(zhì)心算法得出的平均定位誤差比用三邊測(cè)量法得出的小得多。
2020-04-19 09:50:585257 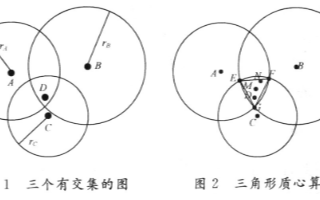
激光位移傳感器可精確非接觸測(cè)量被測(cè)物體的位置、位移等變化,主要應(yīng)用于檢測(cè)物體的位移、厚度、振動(dòng)、距離、直徑等幾何量的測(cè)量。
2020-07-30 16:27:541480 optoNCDT1900提供了速度,尺寸,性能和應(yīng)用多功能性的獨(dú)特組合。這種緊湊的三角測(cè)量傳感器可實(shí)現(xiàn)很高的測(cè)量精度和高達(dá)10kHz的測(cè)量速率。
2020-08-21 15:56:381309 傳感器中激光發(fā)射器通過(guò)鏡頭將可見(jiàn)激光射向被測(cè)物體表面,經(jīng)物體反射的激光通過(guò)接收器鏡頭,被內(nèi)部的CCD線性相機(jī)接收,根據(jù)不同的距離,CCD線性相機(jī)可以在不同的角度下“看見(jiàn)”這個(gè)光點(diǎn)。
2020-08-28 14:51:0720937 傳感器應(yīng)用來(lái)自傳感器專(zhuān)家Micro-Epsilon的optoNCDT 1220、1320和1420激光三角測(cè)量傳感器為位移和距離測(cè)量設(shè)定了新標(biāo)準(zhǔn)。這些小巧、智能、精確的傳感器具有微型光斑尺寸,可以
2020-09-22 15:29:323390 激光三角測(cè)量技術(shù)的應(yīng)用與前景 作者簡(jiǎn)介 陶衛(wèi)(1975),女,博士,研究員,上海交通大學(xué)電子信息與電氣工程學(xué)院,主要從事光電傳感器與檢測(cè)技術(shù)、生物信息檢測(cè)技術(shù)方向的研究,E-mail
2020-10-22 17:46:416735 
激光位移傳感器測(cè)距的原理,其中一種方法是通過(guò)組合發(fā)射元件和位置敏感器件(PSD)進(jìn)行三角測(cè)量以執(zhí)行測(cè)距(檢測(cè)位移量)。
2020-11-17 17:24:1013442 在基于激光的三角測(cè)量系統(tǒng)中,將一條狹窄的光帶投影到3D表面,在非投影器的觀察視角將會(huì)看到一條呈現(xiàn)扭曲的光線 (圖1)。分析這些光線圖像的形狀,其結(jié)果可被用來(lái)進(jìn)行物體表面形狀的精確幾何重構(gòu)。
2021-03-20 09:26:282859 。因?yàn)樗鼡碛懈呔取⑦h(yuǎn)距離測(cè)距、可視紅外激光、小視場(chǎng)角等特性。室內(nèi)測(cè)量距離0.05~80m,室外測(cè)量距離0.05~50m。 特點(diǎn)之一:可視紅外激光 小視場(chǎng)角 傳感器發(fā)出紅外激光,對(duì)射在物體上會(huì)顯示紅外激光點(diǎn),室內(nèi)80米內(nèi)也能測(cè)量5x5cm大小物體的距
2021-06-24 17:13:499928 摘要: 在中國(guó)制造2025的大背景下,隨著智能制造與裝備、高新精密加工及工業(yè)物聯(lián)網(wǎng)技術(shù)的發(fā)展,對(duì)非接觸精密測(cè)量的要求不斷提高。激光三角測(cè)量法以其精度高、穩(wěn)定性好、壽命長(zhǎng)、響應(yīng)速度快等優(yōu)勢(shì),被廣泛應(yīng)用
2021-11-01 11:06:196992 二維激光掃描儀能夠非接觸地測(cè)量被測(cè)物的位置、位移等變化,主要應(yīng)用于檢測(cè)物的位移、厚度、振動(dòng)、距離、直徑等幾何量的測(cè)量。根據(jù)測(cè)量原理,二維激光掃描原理分為激光三角測(cè)量法和激光回波分析法,激光三角測(cè)量法
2021-11-03 11:05:013457 粗糙度,符合ISO2587國(guó)際標(biāo)準(zhǔn)。激光位移傳感器完全無(wú)法實(shí)現(xiàn)粗糙度測(cè)量,日系和國(guó)產(chǎn)光譜共焦傳感器因?yàn)楣獍哌^(guò)大,分辨率不夠也無(wú)法實(shí)現(xiàn)粗糙度測(cè)量。 光譜共焦傳感器測(cè)量的特點(diǎn) 1、傳統(tǒng)三角測(cè)距法對(duì)比 三角測(cè)距是利用感光元件
2021-12-18 14:06:141132 激光位移傳感器可以非接觸測(cè)量被測(cè)物體的位置、位移等變化,主要應(yīng)用于檢測(cè)物的位移、厚度、振動(dòng)、距離、直徑等幾何量的測(cè)量。按照測(cè)量原理,激光位移傳感器原理分為激光三角測(cè)量法和激光回波分析法,激光三角測(cè)量法
2022-01-25 13:42:431776 三角測(cè)距是什么意思?三角測(cè)距原理圖解 三角測(cè)距是什么意思? 三角測(cè)距法是一種低成本的激光雷達(dá)測(cè)距方案,三角測(cè)距是利用激光這把尺子,根據(jù)各種參數(shù)設(shè)定和距離分辨率;以及測(cè)量策略的不同,來(lái)測(cè)定距離。 三角
2022-06-21 17:33:4841563 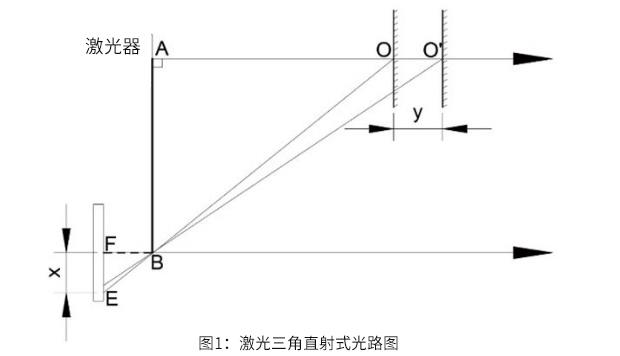
從原理上來(lái)說(shuō),三角測(cè)距的目標(biāo)物體距離越遠(yuǎn),在CCD上的位置差別就越小,以致于在超過(guò)某個(gè)距離后,CCD幾乎無(wú)法分辨,而TOF激光雷達(dá)采用脈沖激光采樣,并且還能?chē)?yán)格控制視場(chǎng)以減少環(huán)境光的影響,可以測(cè)量的距離更遠(yuǎn)。
2022-07-05 14:23:5710701 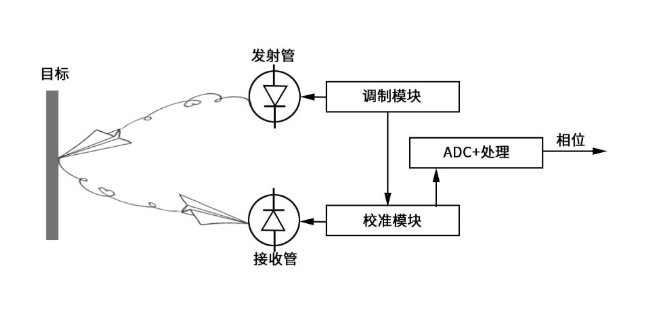
、航空與軍事工業(yè)、冶金和材料工業(yè)的精密測(cè)量檢測(cè)。今天由深圳立儀科技廠家為大家介紹激光位移傳感器激光三角測(cè)量法原理。
2022-07-13 17:33:313408 從名字就可以看出來(lái),激光位移傳感器就是利用激光技術(shù)進(jìn)行測(cè)量的傳感器,目前激光位移傳感器按照原理分成兩種,分別是激光三角法和激光回波分析法。
2022-09-01 15:27:374881 小型激光位移傳感器采用三角測(cè)量法,三角測(cè)量法的原理是通過(guò)鏡頭將可見(jiàn)紅色激光射向被測(cè)物體表面,經(jīng)物體反射的激光通過(guò)接收器鏡頭,被內(nèi)部接收到的光信號(hào)會(huì)出現(xiàn)在CMOS圖像傳感器所對(duì)應(yīng)的位置上。
2022-09-01 15:55:012201 工業(yè)生產(chǎn)中,經(jīng)常需要對(duì)物體表面的相對(duì)距離和方位進(jìn)行測(cè)量,主要有兩種方式:接觸式和非接觸式。最常見(jiàn)的為非接觸式激光傳感器,它是利用激光技術(shù)進(jìn)行測(cè)量的傳感器。它的優(yōu)點(diǎn)是能實(shí)現(xiàn)無(wú)接觸遠(yuǎn)距離測(cè)量,速度快,精度高,量程大,抗干擾能力強(qiáng)等。
2022-10-10 16:10:322740 分辨率高、測(cè)量精度高的測(cè)距傳感器。今天由深圳立儀科技廠家為大家介紹激光測(cè)距傳感器在建筑物的界限測(cè)量中的應(yīng)用: 激光測(cè)距傳感器在建筑物的界限測(cè)量中的應(yīng)用 1、與被測(cè)物體的反射率關(guān)系不大。 許多人擔(dān)心使用激光測(cè)距傳感
2022-10-17 17:43:401433 激光測(cè)距傳感器作為一種新型的一種測(cè)量技術(shù),其主要通過(guò)二極管,對(duì)準(zhǔn)被測(cè)物體發(fā)射激光脈沖,進(jìn)行折射,從而達(dá)到測(cè)量目的。有激光測(cè)距傳感器是一種非接觸式測(cè)量的傳感器,且適用于不同材質(zhì)各種領(lǐng)域,下面小編就為
2022-11-05 14:34:012427 摘要:激光位移傳感器是一種通過(guò)三角定位法、測(cè)量光斑與傳感器之間的距離的傳感器,通過(guò)對(duì)距離數(shù)據(jù)的檢測(cè),我們可以檢測(cè)產(chǎn)品的有無(wú)、位移的距離、料堆存料情況等等。 一、激光位移傳感器原理 激光位移傳感器
2022-11-18 10:53:114784 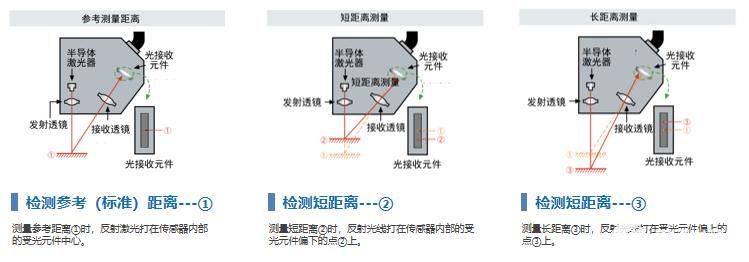
集成式激光三角測(cè)量輪廓儀使用和設(shè)置更方便,并且不需要特殊的照明布置。通過(guò)巧妙平衡輪廓儀設(shè)計(jì)的各種構(gòu)成模塊(圖像傳感器、激光能力、光路、機(jī)械和電子部件),可以以相對(duì)較低的成本獲得準(zhǔn)確的測(cè)量結(jié)果。
2022-12-21 10:09:131297 通過(guò)使用多個(gè)傳感器,三角測(cè)量程序可以比較反射的激光束,來(lái)準(zhǔn)確確定位置和距離。可用于檢查制造系統(tǒng)的位置或用于自動(dòng)化運(yùn)輸中。
2023-02-16 09:42:261651 激光測(cè)距傳感器 VDM28-8-L1/73c/136 測(cè)距傳感器的工作原理主要方式: 三角反射原理型: 非接觸測(cè)距的第一種方法,主要通過(guò)接收器上感應(yīng)接受光源的位置不同,來(lái)測(cè)量距離。此種方法常用
2023-04-26 11:17:102480 當(dāng)今市場(chǎng)上的大多數(shù)非接觸式激光三角位移傳感器都使用相同的測(cè)量原理,即激光三角測(cè)量技術(shù),將目標(biāo)距離轉(zhuǎn)換為輸出信號(hào)。然而,傳感器機(jī)械、光學(xué)、機(jī)械穩(wěn)定性和信號(hào)處理算法的個(gè)性化設(shè)計(jì)可能因供應(yīng)商而異。有許多
2021-12-16 17:06:091036 
使用特殊性強(qiáng)的激光測(cè)距傳感器是罕見(jiàn)的測(cè)量儀器,在激光運(yùn)用的基礎(chǔ)上實(shí)現(xiàn),不斷導(dǎo)入正確的測(cè)量技術(shù),具體運(yùn)用功能更全面,能發(fā)揮的價(jià)值也越大,在此基礎(chǔ)上聲譽(yù)良好的激光測(cè)距傳感器與時(shí)俱進(jìn)激光雷達(dá)第一、能更好
2021-05-27 15:20:251916 
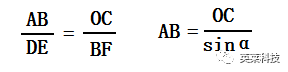
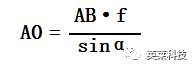
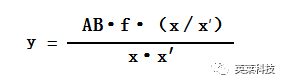
激光雷達(dá)根據(jù)原理可以分為T(mén)OF(飛行時(shí)間),三角法測(cè)距和相位測(cè)距三種方式。 三角法測(cè)距為 三角測(cè)距法是利用相似三角形本地可以測(cè)得透鏡中心和照射到CMOS/CCD上的距離,就可以得到物距,本地的分辨率
2023-07-08 09:40:228601 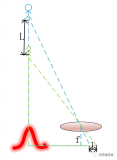
激光位移傳感器是采用激光進(jìn)行高精度位移(距離)測(cè)量的一種傳感器,與傳統(tǒng)測(cè)量方式相比,激光位移傳感器因其高精度、非接觸且快速測(cè)量等優(yōu)勢(shì)在工業(yè)中得到了廣泛的應(yīng)用。
2023-07-30 11:49:191637 什么是激光位移傳感器?激光位移傳感器是利用激光技術(shù)進(jìn)行測(cè)量的傳感器。它由激光器、激光檢測(cè)器和測(cè)量電路組成。激光傳感器是新型測(cè)量儀表。能夠精確非接觸測(cè)量被測(cè)物體的位置、位移等變化。可以測(cè)量位移、厚度
2023-08-02 08:09:082834 
激光位移傳感器的工作原理是基于光的三角測(cè)量法。其工作過(guò)程是,傳感器的激光發(fā)射器以某一角度從鏡頭發(fā)射出激光射向被測(cè)物體表面,而物體的表面會(huì)出現(xiàn)一系列反射的情況,其中一束光線會(huì)從另一角度反射回激光位移傳感器中而形成光斑。
2023-09-29 10:38:003544 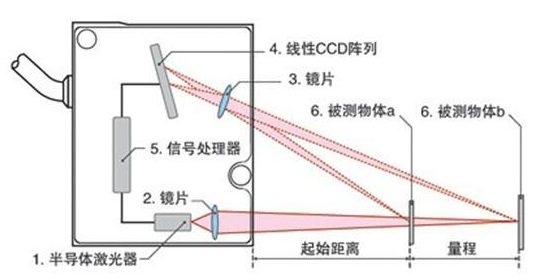
激光測(cè)距傳感器是一種廣泛應(yīng)用于工業(yè)、測(cè)量和科學(xué)領(lǐng)域的高精度測(cè)量設(shè)備,它可以通過(guò)激光束測(cè)量目標(biāo)距離。但是,如何選擇適合自己需要的激光測(cè)距傳感器呢?本文將從以下幾個(gè)方面為您介紹如何選擇激光測(cè)距傳感器
2023-10-10 17:11:101987 
在基于激光的三角測(cè)量系統(tǒng)中,將一條狹窄的光帶投影到3D表面,在非投影器的觀察視角將會(huì)看到一條呈現(xiàn)扭曲的光線 (圖1)。分析這些光線圖像的形狀,其結(jié)果可被用來(lái)進(jìn)行物體表面形狀的精確幾何重構(gòu)。
2023-10-27 10:05:471292 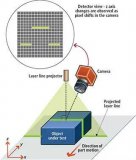
目前激光雷達(dá)的測(cè)量原理主要有脈沖法、相干法和三角法3種,脈沖法和相干光法對(duì)激光雷達(dá)的硬件要求高,但測(cè)量精度比激光三角法要高得多,故多用于軍事領(lǐng)域。而激光三角測(cè)距法因其成本低,精度滿足大部分商用及民用要求,故得到了廣泛關(guān)注。
2023-12-25 10:04:562137 
激光測(cè)距傳感器原理和應(yīng)用實(shí)例 激光測(cè)距傳感器是一種通過(guò)激光技術(shù)進(jìn)行距離測(cè)量的傳感器。它利用激光器產(chǎn)生的激光束,經(jīng)過(guò)目標(biāo)物體后,通過(guò)接收器接收反射回來(lái)的激光束,通過(guò)計(jì)算激光的回程時(shí)間來(lái)確定目標(biāo)物體
2024-03-05 16:29:553300 從古老三角法到現(xiàn)代高精尖掃描儀當(dāng)我們對(duì)對(duì)物體進(jìn)行三維測(cè)量時(shí),一個(gè)非常重要的話題,便是如何捕捉被測(cè)點(diǎn)的空間三維坐標(biāo)信息,而比較常用的方法就是三角測(cè)量法。人類(lèi)對(duì)于三角測(cè)量法的應(yīng)用由來(lái)已久,早在古埃及
2024-07-01 18:05:231433 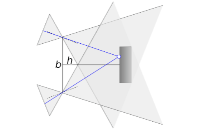
基于激光雷達(dá)技術(shù)的傳感器,它通過(guò)發(fā)射激光脈沖并接收反射回來(lái)的激光信號(hào)來(lái)測(cè)量距離。LiDAR傳感器可以同時(shí)測(cè)量多個(gè)點(diǎn)的距離,從而生成三維空間的點(diǎn)云數(shù)據(jù)。 激光測(cè)距傳感器(Laser Range Finder)是一種基于激光技術(shù)的傳感器,它通過(guò)發(fā)射激光脈沖并接收反射回來(lái)的激光信號(hào)來(lái)測(cè)量距離。激光測(cè)距傳
2024-08-29 15:56:521572 激光測(cè)距傳感器是一種利用激光技術(shù)進(jìn)行距離測(cè)量的高精度儀器。它具有測(cè)量速度快、精度高、抗干擾能力強(qiáng)等優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)、科研、軍事等領(lǐng)域。 一、激光測(cè)距傳感器的工作原理 激光測(cè)距傳感器的基本原理
2024-08-29 15:58:382743 激光測(cè)距傳感器是一種利用激光技術(shù)進(jìn)行距離測(cè)量的傳感器,具有測(cè)量速度快、精度高、抗干擾能力強(qiáng)等優(yōu)點(diǎn),在工業(yè)、科研、軍事等領(lǐng)域得到了廣泛應(yīng)用。但是,激光測(cè)距傳感器也存在一些缺點(diǎn),以下是對(duì)這些缺點(diǎn)的分析
2024-08-29 16:01:402005 激光測(cè)距傳感器輸出的信號(hào)類(lèi)型多樣,這些信號(hào)類(lèi)型根據(jù)應(yīng)用場(chǎng)景、傳輸距離、抗電磁干擾能力等因素進(jìn)行選擇。 一、激光測(cè)距傳感器概述 激光測(cè)距傳感器是一種利用激光技術(shù)進(jìn)行距離測(cè)量的傳感器,其工作原理
2024-08-29 16:08:431914 激光測(cè)距傳感器是一種利用激光技術(shù)進(jìn)行距離測(cè)量的傳感器,廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人導(dǎo)航、無(wú)人駕駛等領(lǐng)域。 一、激光測(cè)距傳感器的工作原理 激光測(cè)距傳感器的工作原理是利用激光發(fā)射器發(fā)射一束激光,激光經(jīng)過(guò)
2024-08-29 16:13:213142 、信號(hào)處理單元和控制單元組成。激光發(fā)射器發(fā)出激光束,激光束照射到目標(biāo)物體上后,部分光線被反射回來(lái),被接收器捕捉。根據(jù)光束往返的時(shí)間,可以計(jì)算出距離。 激光傳感器的類(lèi)型 三角測(cè)量激光傳感器 :通過(guò)測(cè)量激光束在物體表
2024-09-04 14:48:002136 激光位移傳感器的工作原理主要基于光的反射和激光三角測(cè)量法(或回波分析法),通過(guò)精確地測(cè)量目標(biāo)物體與傳感器之間的距離,獲取位移或高度等信息。以下是對(duì)其工作原理的介紹: 一、激光發(fā)射與接收 激光發(fā)射
2025-02-13 15:57:462333 激光位移傳感器數(shù)據(jù)采集系統(tǒng)的原理主要基于激光三角測(cè)量法或回波分析法,并通過(guò)一系列硬件和軟件組件實(shí)現(xiàn)數(shù)據(jù)的采集、處理與輸出。以下是關(guān)于激光位移傳感器數(shù)據(jù)采集系統(tǒng)原理的介紹: 一、基本原理 激光三角測(cè)量法
2025-02-13 18:03:101287 信號(hào)的特性(如相位、頻率或振幅的變化)來(lái)確定目標(biāo)物體與傳感器的距離或位移值。具體原理分為激光三角測(cè)量法和激光回波分析法,前者適用于高精度、短距離的測(cè)量,后者則用于遠(yuǎn)距離測(cè)量。 傳統(tǒng)位移傳感器 :其測(cè)量原理多種多
2025-02-13 18:09:101329 國(guó)產(chǎn)光子精密PDH/PDM系列激光位移傳感器,正是基于優(yōu)化后的激光三角測(cè)量法,實(shí)現(xiàn)了微米級(jí)檢測(cè)精度,且采樣頻率可達(dá) 260kHz,即使是高速運(yùn)動(dòng)的微小工件(如硬盤(pán)磁頭、壓電陶瓷),也能實(shí)時(shí)捕捉位移變化。
2025-09-18 14:12:261109 
3D傳感器是實(shí)現(xiàn)深度感知的核心技術(shù)。這些傳感器廣泛應(yīng)用于多種常見(jiàn)的3D視覺(jué)技術(shù)中,例如立體相機(jī)、激光雷達(dá)(LiDAR)、飛行時(shí)間(ToF)相機(jī)和激光三角測(cè)量。通常根據(jù)應(yīng)用場(chǎng)景和技術(shù)要求選擇合適的3D
2025-11-28 17:03:371713 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論