 電子發(fā)燒友App
電子發(fā)燒友App



|
無傳感器的直流無刷電機(jī)控制器ML4435及其應(yīng)用?? 摘要:ML4435脈寬調(diào)制式電動(dòng)機(jī)控制器,為起動(dòng)和控制△接或Y接繞組的直流無刷(LBDC)電機(jī)速度(無霍爾效應(yīng)傳感器)提供了所有必要的功能。從電機(jī)繞組傳感的反電勢電壓,經(jīng)鎖相環(huán)可確定恰當(dāng)?shù)膿Q向相位時(shí)序。 關(guān)鍵詞:三相直流無刷電機(jī);無傳感器;反電勢取樣器 Sensorless BLDC Motor Controller ML4435 and Its Applications LIU Sheng-li, LIU Ning-ning Abstract:The ML4435 PWM motor controller provides all of the function necessary for starting and controlling the speed of delta or wye wound brushless DC motors without Hall Effect sensors.Back EMF voltage is sensed from motor windings to determin the proper commutation phas sequence using a phase locked loop(PLL). Keywords:Three-phase BLDC motors;Sensorless;Back EMF sampler? ??? ML4435是2001年3月最新推出的電機(jī)控制器專用IC,屬于無傳感器型、直流無刷(BLDC)電動(dòng)機(jī)控制系統(tǒng),它比ML4425/ML4426有新的改進(jìn)和簡化,外部引腳從28個(gè)減少到了20個(gè),同樣集成了所有必要的自動(dòng)檢測和控制功能。圖1是ML4435的外形引腳圖,圖2是它的內(nèi)部功能方框。
1?? ML4435的主要特性及性能 ??? ML4435的主要特性如下: ??? ——專有的反電勢傳感換向技術(shù),以實(shí)現(xiàn)無霍爾效應(yīng)傳感器的電機(jī)通信; ??? ——PWM逐個(gè)脈沖式電流限制,可保護(hù)電機(jī)和MOSFET驅(qū)動(dòng)器; ??? ——可單臺(tái)工作;——軟起動(dòng)功能可限制起動(dòng)電流; ??? ——脈寬調(diào)制PWM速度控制可提高效率,并盡量減小MOSFET尺寸; ??? ——機(jī)載欠壓閉鎖和斷電檢測; ??? ——電機(jī)的轉(zhuǎn)速輸出傳感換向。 ??? ML4435為三相直流無刷電機(jī)無傳感器型速度控制提供了所有的電路。控制功能包括:起動(dòng)電路、反電勢換向控制、脈寬調(diào)制PWM速度控制、逐個(gè)脈沖式電流限制、電機(jī)的慣性跟蹤、欠壓保護(hù)。 ??? 電機(jī)的起動(dòng)是通過電機(jī)換向來完成的,它在低頻下產(chǎn)生低速運(yùn)動(dòng)。低速運(yùn)動(dòng)用以產(chǎn)生一個(gè)反電勢信號。反電勢取樣電路自動(dòng)跟蹤電機(jī)的位置,并由一個(gè)鎖相環(huán)(PLL)控制換向時(shí)間。換向控制電路還輸出一個(gè)速度反饋信號,用于速度控制環(huán)。速度控制環(huán)由誤差放大器和PWM比較器組成,它產(chǎn)生一個(gè)PWM占空比作速度調(diào)節(jié)控制。 ??? 電機(jī)的電流受限于逐個(gè)脈沖式PWM關(guān)閉比較器,它由外部電流傳感電阻器兩端的電壓來關(guān)閉。換向控制、PWM速度控制和電流限制綜合產(chǎn)生輸出驅(qū)動(dòng)器信號。六路輸出驅(qū)動(dòng)器用于提供柵極信號給外部三相橋功率級,以適應(yīng)LBDC直流無刷電機(jī)的電壓和電流的要求。 ??? 附加的功能包括:電機(jī)的慣性跟蹤功能與欠壓閉鎖輸出電路,一旦加到ML4435的電壓VCC過低時(shí),可關(guān)閉輸出驅(qū)動(dòng)器。ML4435的各引腳功能見表1,主要電氣參數(shù)見表2。 表2?? ML4435的主要電氣參數(shù) 〔除另有說明外,Ta為工作溫度范圍,VCC=(1±10%)12V,RT=50kΩ〕
表1?? ML4435引腳功能
2?? ML4435功 能 詳 解 2. 1?? ML4435的 外 部 元 件 選 擇 ??? 外 部 元 件 的 選 擇 需 要 根 據(jù) 電 動(dòng) 機(jī) 的 電 氣 參 數(shù) 和 機(jī) 械 參 數(shù) 進(jìn) 行 計(jì) 算 , 下 面 列 出 計(jì) 算 所 需 的 電 機(jī) 參 數(shù) : ??? — —最 大 直 流 電 機(jī) 電 源 電 壓VMOTOR(V) ; ??? — —最 大 工 作 電 流Imax(A) ; ??? — —測 量 引 線 間 的 繞 組 電 阻R1-1(Ω); ??? — —磁 極 的 數(shù) 目N; ??? — —反 電 勢 常 數(shù)Ke(V·s/rad); ??? — —電 機(jī) 的 轉(zhuǎn) 矩 常 數(shù)Kτ(N·m/A) ; ??????????? Kτ=Ke(SI單 位); ??? — —最 大 轉(zhuǎn) 速nmax(r/min) ; ??? — —電 機(jī) 和 其 負(fù) 載 的 轉(zhuǎn) 動(dòng) 慣 量J(kg·m2) ; ??? — —電 機(jī) 和 其 負(fù) 載 的 粘 滯 阻 尼 因 數(shù) ξ 。 ??? 若 上 述 數(shù) 值 有 幾 個(gè) 不 知 道 , 仍 能 通 過 實(shí) 驗(yàn) 來 確 定 元 件 的 最 佳 值 。 下 述 公 式 和 元 件 選 擇 圖 可 作 為 優(yōu) 化 應(yīng) 用 的 起 點(diǎn) 。 可 選 用 最 靠 近 近 似 計(jì) 算 結(jié) 果 的 標(biāo) 準(zhǔn) 值 元 件 。 2. 2?? 電 源 和 芯 片 電 壓 基 準(zhǔn) ??? 10腳 電 源 電 壓VCC=(12±10% )V, 推 薦 在VCC腳 與 地 之 間 接 一0. 1μF的 旁 路 電 容 器 , 并 盡 量 靠 近VCC端 接 地 。 在ML4435內(nèi) 部 產(chǎn) 生6 V基 準(zhǔn) 電 壓 , 它 出 現(xiàn) 在RT腳 , 在 該 腳 對 地 接 一 只 電 阻 可 設(shè) 定PWM頻 率 。 可 用 電 位 器 取 代 該 電 阻 來 設(shè) 置 速 度 指 令 ( 詳 見2? 16) 。 注 意 : 若 要 在6腳 加 外 部 電 路 , 則 要 用 一 輸 入 阻 抗 至 少 為1 MΩ 的 運(yùn) 算 放 大 器 作 該 腳 的 緩 沖 器 。 2. 3?? 輸 出 驅(qū) 動(dòng) 器 ??? 輸 出 驅(qū) 動(dòng) 器LA、LB、LC和HA、HB、HC為 三 相 橋 功率級提供圖騰柱式輸出驅(qū)動(dòng)信號。ML4435的全部控制功能都從這6個(gè)腳輸出。其中LA、LB、LC分別為三相功率極的A、B、C提供低邊驅(qū)動(dòng)信號,其有效高電平信號為12V。而HA、 HB、 HC分別為三相功率級的A、B、C相提供高邊驅(qū)動(dòng)信號,其有效低電平信號為12V。 2.4?? 三相橋式功率級的電流限制 ??? 圖3中電流傳感電阻RSENSE安設(shè)在三相功率級,可調(diào)節(jié)功率級和直流無刷電機(jī)的最大電流。如RSENSE二端電壓超過19腳SOFTSTART設(shè)置的電流限制門限電平,則電流調(diào)節(jié)是在PWM周期的剩余段關(guān)斷輸出驅(qū)動(dòng)器LA、LB、LC來實(shí)現(xiàn)的。RSENSE最大功耗見圖4。
2.5?? 軟起動(dòng) ??? SOFTSTART(19腳)上電壓設(shè)定電流限制門限電平。ML4435有一個(gè)1?1V電源電壓的內(nèi)部分壓器,見圖5。分壓器由兩只225kΩ電阻組成,它把電流限制門限電平設(shè)定在0?55V左右。可用外部分壓器或外部基準(zhǔn)來取代SOFTSTART的設(shè)置,其電流大于內(nèi)部分壓器10倍。可在該腳對地接一只電容器,作功率上升時(shí)電流限制的軟斜升。可用圖6選擇斜升時(shí)間。
2.6?? RSENSE ??? RSENSE提供與電機(jī)電流成比例的電壓,作電流限制。RSENSE端的失效閉鎖電壓是0.6V,它由SOFTSTART(19腳)設(shè)定。電流傳感電阻應(yīng)是低電感的,例如碳膜電阻。用線繞mΩ級的電阻,應(yīng)盡力降低電感。其額定功率正比于功耗Imax2RSENSE。 2.7?? ISENSE濾波器 ??? ISENSE輸入端(1腳)需要接一個(gè)RC低通濾波器,以消除電流傳感信號前沿的尖峰電壓,它由二極管反向恢復(fù)時(shí)的穿透電流引起。若無該濾波器會(huì)出現(xiàn)電流限制的虛假觸發(fā)。此電路推薦的標(biāo)準(zhǔn)值R=1kΩ,C=1000pF,可濾除窄于1μs的尖峰干擾。電容值不宜超過3300pF。濾波前后的波形見圖7。
2.8?? 逐個(gè)脈沖式電流限制 ??? 當(dāng)ISENSE腳電壓超過SOFTSTART腳電壓時(shí),電流限制電路被激活,它在PWM周期的剩余階段關(guān)閉驅(qū)動(dòng)器LA、LB和LC。 2.9?? 換向控制 ??? 一臺(tái)三相直流無刷電機(jī)需要電子換向,以實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng)。電子換向要求開通和關(guān)斷三相半橋式功率開關(guān)。為了讓轉(zhuǎn)矩實(shí)現(xiàn)單一方向,由轉(zhuǎn)子的位置給出換向指令。要實(shí)現(xiàn)ML4435的電子換向,是通過適當(dāng)時(shí)序來開通和關(guān)斷一相低輸出L和另一相高輸出H。總共存在六種L和H輸出組合(即六種開關(guān)狀態(tài)),如表3標(biāo)出的狀態(tài)A~狀態(tài)F,它們構(gòu)成一個(gè)完整的換向循環(huán)周期。這一開關(guān)時(shí)序被編程在圖8所示的換向狀態(tài)機(jī)中,該換向狀態(tài)機(jī)的時(shí)鐘是由VCO的輸出提供。 表3?? 6種換向控制狀態(tài)
2. 10?? 壓 控 振 蕩 器 ??? VCO在TACH(2腳 ) 輸 出 一TTL兼 容 的 時(shí) 鐘 脈表示驅(qū)動(dòng)器導(dǎo)通沖 , 它 正 比 于SPEED FB( 18腳 ) 輸 入 電 壓 。 頻 率 與 電 壓 或 與 VCO常 數(shù) KV的 比 例 , 由 圖 9中 的 RVCO( 4腳 ) 接 地 電 阻 和 CVCO( 20腳 ) 接 地 電 容 器 來 設(shè) 定 。
??? RVCO設(shè)定的電流正比于VCO輸入電壓SPEEDFB減去0.7V。該電流用于門限電壓在2~3.75V之間對CVCO充電和放電,見圖9。RVCO限制在0.2V較低電壓。這導(dǎo)致CVCO的三角波形對應(yīng)于TACH腳時(shí)鐘,也見圖9。當(dāng)VCO的輸入等于或稍小于6V時(shí),KV被設(shè)定在VCO輸出頻率對應(yīng)于最大換向頻率fmax,即對應(yīng)于最大電機(jī)速度。CVCO和RVCO可由首次計(jì)算的fmax值來選擇: fmax=0.05×nmax×N 2.11?? TACH ??? TACH(2腳)輸出VCO頻率,它6倍于換向頻率。當(dāng)電機(jī)在最低轉(zhuǎn)速時(shí)(即SPEEDFB低于0?97V),TACH輸出還表示因TTL停留在高電平而使電機(jī)處于低轉(zhuǎn)速。 2.12?? 反電勢取樣器電路 ??? 輸入到VCO的SPEEDFB(18腳)受反電勢取樣器控制。反電勢傳感腳FBA、FBB、FBC輸入到反電勢取樣器,需要來自電機(jī)各相引線的信號,該信號低于ML4435的VCC值。相位傳感的輸入阻抗是8.7kΩ。如果電機(jī)電壓大于ML4435的VCC值,則需要串接電阻RFB到電機(jī)各相引線,見圖10。RFB可從圖11曲線選擇或利用下式算出: ??? RFB=8.7kΩ(VMOTOR/12-1)
??? 反電勢取樣器把電機(jī)各相電壓分壓為低于VCC=12V(正常值)的信號電壓,并由下述方程式計(jì)算電機(jī)的中性點(diǎn)電壓: ??? VNEUTRAL=(VFBA+VFBB+VFBC)/3。 ??? 這就允許ML4435能比較反電勢信號與電機(jī)中性點(diǎn),而不需要從Y接繞組的電機(jī)中引出一信號線。對△接繞組的電機(jī),因不存在物理中點(diǎn),故必須計(jì)算該基準(zhǔn)參考點(diǎn)。 ??? 反電勢取樣器所獲電機(jī)相位,是未被驅(qū)動(dòng)時(shí)的值:也就是如果LA和HB均導(dǎo)通,那么相位A被驅(qū)動(dòng)為低電平,相位B被驅(qū)動(dòng)為高電平,相位C則被取樣。被取樣相位提供一個(gè)反電勢信號,它對照電機(jī)的中性點(diǎn)作比較。取樣器受換向狀態(tài)機(jī)器控制。取樣的反電勢經(jīng)一個(gè)誤差放大器與中性點(diǎn)比較。誤差放大器的輸出端送出充電或放電電流到SPEEDFB(18腳),它向VCO提供電壓。 2.13?? 反電勢傳感的鎖相環(huán)換向控制 ??? 由換向狀態(tài)機(jī)、VCO、反電勢取樣器三者構(gòu)成一個(gè)鎖相環(huán)路,以使換向時(shí)鐘自動(dòng)跟蹤反電勢信號。完整的鎖相環(huán)路見圖12。該鎖相環(huán)需要一個(gè)超前—滯 后 濾 波 器 , 它 由SPEED FB(18腳 ) 外 部 元 件 來 設(shè) 置 。
2.14?? 電機(jī)的起動(dòng) ??? 當(dāng)電源首先加到ML4435時(shí),電機(jī)處于靜止,故反電勢等于零。電機(jī)需要轉(zhuǎn)動(dòng),以使反電勢取樣器自動(dòng)跟蹤電機(jī)位置,并使電機(jī)換向。ML4435用最低的VCO頻率開始使電機(jī)換向。該低頻換向由RVCO上的0?2V箝位設(shè)定,這就提供一為fmax/30的換向頻率。 2.15?? 轉(zhuǎn)動(dòng)狀態(tài) ??? 在反電勢傳感后,PLL自動(dòng)跟蹤電機(jī)位置,電機(jī)則按閉合環(huán)路控制轉(zhuǎn)動(dòng)。在這一點(diǎn)上,速度控制環(huán)應(yīng)迫使電機(jī)速度相應(yīng)于SPEEDSET電壓設(shè)置的速度。 2.16?? PWM速度控制 ??? 速度控制是由在SPEEDSET(5腳)設(shè)置的速度指令來完成的,該腳輸入電壓為0.2~6V。速度指令的精度由外部元件RVCO和CVCO確定。控制ML4435的速度指令有幾種方法:其一是用一電位器接在RT與地之間,而將滑動(dòng)觸頭接在SPEEDSET。若用微處理器控制5腳,則可用RT作數(shù)模轉(zhuǎn)換器(DAC)輸入基準(zhǔn)。RT電壓應(yīng)經(jīng)緩沖器接外部電路。經(jīng)跨導(dǎo)誤差放大器,速度指令與比SPEEDFB(18腳)低0?7V的傳感速度相比較。速度誤差放大器的輸出端是SPEEDCOMP(3腳),它被箝位在8.2~2.2V之間。8?2V信號與全PWM占空比相對應(yīng),而2?2V則對應(yīng)0%占空比。速度環(huán)路補(bǔ)償元件接該腳,見圖13。可用下式來計(jì)算補(bǔ)償元件:
??? CSC2=
??? RSC= ??? CSC1=10×CSC2 式中:freq是速度環(huán)路的帶寬(Hz)。
??? 圖13中3腳電壓與三角波振蕩器比較,產(chǎn)生一PWM占空比。PWM振蕩器產(chǎn)生一個(gè)3~7V的三角波函數(shù),而三角波振蕩器頻率由RT(6腳)的接地電阻設(shè)定。RT可由圖14曲線來選擇。來自速度控制環(huán)的PWM占空比,選通逐個(gè)脈沖式電流限制電路,以控制輸出驅(qū)動(dòng)器LA、LB、LC。
2.17?? 慣性跟蹤 ??? 當(dāng)CVCO(20腳)被拉低到1?5V時(shí),6路輸出驅(qū)動(dòng)器均關(guān)斷。慣性跟蹤C(jī)OAST功能切斷所有的電源使電機(jī)隨慣性至停止。20腳的慣性跟蹤功能見圖15,它可由一只接地開關(guān)或由圖15中20腳的接地的開路集電極接地的開關(guān)管來驅(qū)動(dòng)。
2.18??? 欠壓保護(hù) ??? 欠壓保護(hù)用于保護(hù)低VCC狀況下的三相功率級。欠壓保護(hù)是在 VCC=9.2V或更低時(shí)被啟動(dòng)。欠壓保護(hù)也關(guān)斷全部輸出驅(qū)動(dòng)器LA、LB、LC和HA、HB、HC。啟動(dòng)過電壓的比較器具有500mV的滯后。 2.19?? 輸出驅(qū)動(dòng)器到三相橋功率級的接口電路 ??? 大多數(shù)靈活的電路結(jié)構(gòu),是采用高邊驅(qū)動(dòng)器來控制N溝道MOSFET或IGBT,它允許的應(yīng)用范圍是12~170V。 3?? 的典型應(yīng)用電路 ??? 圖16給出了典型應(yīng)用中的ML4435及所有支持電路,圖17則給出了采用IR公司的IR2118作高邊驅(qū)動(dòng)器的功率級電路和高壓MOSFET。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
無傳感器的直流無刷電機(jī)控制器ML4435及其應(yīng)用
















- 無傳感器(13713)
- 電機(jī)控制芯片(33026)
- ML4435(5803)


相關(guān)推薦
熱點(diǎn)推薦
使用位置傳感器進(jìn)行無刷電機(jī)控制
刷直流電機(jī)或場定向控制 (FOC) 無刷交流電機(jī),確實(shí)可以實(shí)現(xiàn)無需任何旋轉(zhuǎn)角度傳感器即可工作。但實(shí)際情況是,工業(yè)和人形機(jī)器人、自主移動(dòng)機(jī)器人和直線電機(jī)運(yùn)輸系統(tǒng)等終端設(shè)備,旋轉(zhuǎn)角度傳感器或線性位置傳感器依然是不可或缺的關(guān)鍵組件。
2025-08-07 14:25:08 5648
5648
5648
最經(jīng)典電動(dòng)自行車控制器設(shè)計(jì)方案
無刷電機(jī)又可分為有傳感器和無傳感器兩類,對于無位置傳感器的無刷電機(jī),必須要先將車用腳蹬起來,等電機(jī)具有一定的旋轉(zhuǎn)速度以后,控制器才能識(shí)別到無刷電機(jī)的相位,然后控制器才能對電機(jī)供電。
2015-10-02 15:40:0010077
10077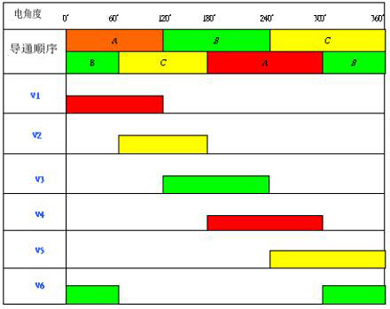
用于驅(qū)動(dòng)無傳感器 BLDC 電機(jī)的優(yōu)化控制方案
我們將討論用于驅(qū)動(dòng)無傳感器 BLDC 電機(jī)的優(yōu)化控制方案,并展示微控制器外設(shè)互操作在這些應(yīng)用中的重要性和優(yōu)勢。我們還將向您介紹一些可用于無傳感器 BLDC 電機(jī)控制應(yīng)用的最新微控制器。 隨著
2021-06-17 09:56:495443
5443
帶霍爾傳感器的三相無刷直流電機(jī)控制
無刷直流電動(dòng)機(jī) (BLDC),也稱為電子換向電動(dòng)機(jī)(ECM、EC 電動(dòng)機(jī))或同步直流電動(dòng)機(jī),是由直流電通過逆變器或開關(guān)電源供電的同步電動(dòng)機(jī),該同步電動(dòng)機(jī)會(huì)產(chǎn)生交流電流來驅(qū)動(dòng)各相通過閉環(huán)控制器控制電機(jī)
2021-10-14 15:37:4912312
12312
無刷直流 (BLDC) 電機(jī)和控制器的接線方式
AN186——無刷直流 (BLDC) 電機(jī)的連接 無刷直流 (BLDC) 電機(jī)的連接 無刷直流 (BLDC) 電機(jī)和控制器的接線沒有既定的標(biāo)準(zhǔn),因此,霍爾傳感器和相位引線可能標(biāo)記為 ABC、UVW
2023-08-18 17:08:446534
6534
無傳感器無刷直流電機(jī)的工作原理是什么?
近年來,國內(nèi)市場上電動(dòng)車使用的電機(jī)主要有三種:有刷電機(jī)、有位置傳感器無刷電機(jī)和無位置傳感器無刷電機(jī)。使用有刷直流電機(jī)容易解決換相問題,但是噪音大,而且碳刷容易磨損或損壞,這會(huì)增大維護(hù)、維修難度,增加
2019-09-03 07:03:34
無傳感器無刷直流電機(jī)部分代碼分析與運(yùn)行結(jié)果如何?
無傳感器無刷直流電機(jī)控制原理是什么?怎樣去分析無傳感器無刷直流電機(jī)開發(fā)板的部分硬件電路?無傳感器無刷直流電機(jī)部分代碼分析與運(yùn)行結(jié)果如何?
2021-07-22 06:14:51
無傳感器無刷電機(jī)驅(qū)動(dòng)控制器系統(tǒng)簡介
無位置傳感器無刷電機(jī)控制器在浙江永康紫微單片機(jī)開發(fā)成功,該 項(xiàng)技術(shù)完全擁有自主知識(shí)產(chǎn)權(quán),并首先應(yīng)用于電動(dòng)車直流無刷電機(jī)的控制,該技術(shù)的研制成功,必將極大地推動(dòng)直流無刷電機(jī)的發(fā)展。 該項(xiàng)技術(shù)
2018-10-30 16:00:02
無傳感器BLDC電機(jī)控制怎么引入低成本應(yīng)用?
。無傳感器系統(tǒng)已出現(xiàn)相當(dāng)長一段時(shí)間,但在過去,它們需要昂貴的控制器才能運(yùn)行除去傳感器所需的算法。數(shù)字信號控制器(DSC)(例如 Microchip 的dsPIC33FJ15MC102,批量訂購時(shí),單價(jià)僅約1美元)使無傳感器BLDC電機(jī)控制得以大規(guī)模應(yīng)用。
2020-04-15 08:00:49
無傳感器的直流無刷電機(jī)控制器ML4435及其應(yīng)用
本帖最后由 eehome 于 2013-1-5 10:01 編輯
無傳感器的直流無刷電機(jī)控制器ML4435及其應(yīng)用
2012-08-20 10:53:48
無位置傳感器無刷直流電機(jī)的+FPGA+控制實(shí)現(xiàn)
采樣值較大,響應(yīng)速度慢而導(dǎo)致速度不是很低時(shí)過零檢測失敗而使電機(jī)停轉(zhuǎn),為了能使電機(jī)在不改變算法的前提下降低到更低速,并且提高系統(tǒng)運(yùn)行穩(wěn)定可靠性,提出了一種全數(shù)字化的無刷直流電動(dòng)機(jī)速度伺服系統(tǒng)控制器的數(shù)字
2025-07-10 16:35:19
無位置傳感器無刷直流電機(jī)矢量控制研究
針對無刷直流電機(jī)傳統(tǒng)控制的不足,在 STM32 控制框架內(nèi)設(shè)計(jì)了無位置傳感器電機(jī)矢量控制系統(tǒng),采用基于鎖相環(huán)的滑模觀測器對轉(zhuǎn)子位置及轉(zhuǎn)速精確估計(jì)并完成電機(jī)矢量控制。給出控制系統(tǒng)的總體設(shè)計(jì)框架及其
2025-08-04 14:42:11
無位置傳感器直流無刷電機(jī)弱磁調(diào)速控制的優(yōu)化
在無位置傳感器直流無刷電機(jī)的弱磁控制過程中,隨著弱礁程度加深,電流波動(dòng)會(huì)越來越嚴(yán)重,導(dǎo)致電機(jī)電礁轉(zhuǎn)矩波動(dòng)的厲害。實(shí)驗(yàn)表明,不同的 PWIM 控制方式會(huì)使得電流波動(dòng)的大小不同。從理論上分析為什么PWM
2025-08-04 14:51:12
無位置傳感器直流無刷電機(jī)的退磁控制
本文闡述了無位置傳感器直流無刷電機(jī)控制中退磁與轉(zhuǎn)子位置檢測的關(guān)系,通過對退磁過程的分析,提出了通過 PWM 配置使斷電繞組具有最大反向電壓的加速退方法。
純分享帖,點(diǎn)擊下方附件免費(fèi)獲取完整資料
2025-08-04 14:45:50
無位置傳感器直流無刷電機(jī)軟件起動(dòng)
為了解決無位置傳感器直流無刷電機(jī)在起動(dòng)時(shí)基于反電動(dòng)勢的位置檢測方法無法提取出位置信息的問題,分析了無位置傳感器直流無刷電機(jī)的起動(dòng)方法,針對電動(dòng)車這一特殊的應(yīng)用場合進(jìn)行了相應(yīng)的改進(jìn),電動(dòng)車在起動(dòng)時(shí)有
2025-08-04 14:49:53
無位置傳感器的直流無刷電機(jī)控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
引言 傳統(tǒng)上把具有梯形波反電勢的永磁同步電機(jī)稱為直流無刷電機(jī)。直流無刷電機(jī)的轉(zhuǎn)矩控制需要轉(zhuǎn)子位置信息來實(shí)現(xiàn)有效的定子電流控制。而且,對于轉(zhuǎn)速控制,也需要速度信號,使用位置傳感器是直流無刷電機(jī)
2018-11-07 10:41:54
無刷直流電機(jī)與控制器相位快速匹配的方法分享
接法能讓無刷電機(jī)正常速度運(yùn)轉(zhuǎn),且120度控制器的這6種接法里有3種接法是正轉(zhuǎn),另3種接法是反轉(zhuǎn)。60度控制器有4種接法能讓無刷直流電機(jī)正常速度運(yùn)轉(zhuǎn),其中兩種正轉(zhuǎn)和兩種反轉(zhuǎn)。所以我們實(shí)際只需要最多120
2023-03-13 14:14:58
無編碼器控制無刷直流電機(jī)
這只是一個(gè)控制直流無刷電機(jī)的快速文章,沒有編碼器。本文適用于通常使用霍爾傳感器進(jìn)行換向的無刷電機(jī)。這篇文章不適用于通常以非常高的速度運(yùn)行的無霍爾ESC(電子速度控制)電機(jī),用于四軸和船只等。回到
2018-07-25 16:44:07
無刷電機(jī)控制器原理是什么?
無刷電機(jī)為什么會(huì)誕生?無刷電機(jī)的優(yōu)點(diǎn)及缺點(diǎn)是什么?無刷電機(jī)控制器原理是什么?
2021-07-21 06:53:54
直流無刷電機(jī)控制
自己做的直流無刷電機(jī)控制器主控stc12驅(qū)動(dòng)芯片2104mos irf540程序下載后 就只轉(zhuǎn)一下反轉(zhuǎn)擰電機(jī)寧不動(dòng)不知道是為啥求大神指導(dǎo)
2017-06-02 10:12:58
直流無刷電機(jī)控制器工作原理是什么
一、控制器基本工作原理 控制器跟據(jù)電機(jī)換相信號(三個(gè)霍爾傳感器 hall-sensor 輸出的六種不同信號)輸出相應(yīng)的控制信號來驅(qū)動(dòng)功率晶體管順序?qū)ㄊ?b class="flag-6" style="color: red">電機(jī)旋轉(zhuǎn),如下圖1中AH、BH、CH
2023-03-14 14:32:38
直流無刷電機(jī)霍爾傳感器的2種安裝方式
無刷電機(jī)的轉(zhuǎn)子的位置,從而控制換相功率,在三相直流無刷電機(jī)里,用三個(gè)霍爾傳感器就可以記錄六個(gè)相位的位置。隨著電力電子技術(shù)的發(fā)展,無刷直流電機(jī)得到了越來越廣泛的應(yīng)用,在電動(dòng)車輛、家用電器、紡織機(jī)械等領(lǐng)域
2019-10-31 08:00:00
A4962三無刷直流(BLDC)電機(jī)控制器有哪些應(yīng)用
A4962是什么?A4962無刷直流(BLDC)電機(jī)控制器有哪些特色及優(yōu)點(diǎn)?A4962三無刷直流(BLDC)電機(jī)控制器有哪些應(yīng)用?
2021-08-13 06:19:28
【案例分享】無傳感器BLDC驅(qū)動(dòng)控制系統(tǒng)的設(shè)計(jì)
功能;剎車及時(shí),制動(dòng)柔和,完全能實(shí)現(xiàn)單片機(jī)對無傳感器直流無刷電機(jī)的基本控制。行程計(jì)量采用浮點(diǎn)數(shù)累加,結(jié)果在LCD上顯示,簡易直觀。該控制器成本低廉,操作簡單,可靠性高。本設(shè)計(jì)雖在BLDC反電勢控制上取得
2019-07-22 04:00:00
一種無傳感器無刷直流電機(jī)的控制算法
Microchip 的應(yīng)用筆記 AN1083 詳細(xì)地講述了一種無傳感器無刷直流電機(jī)的控制算法,其配套的開源算法采用 dsPIC? 數(shù)字信號控制器實(shí)現(xiàn),此前在淘寶購入了一塊基于 STM32 的無刷直流電機(jī)開發(fā)板,于是試著將該開源代碼移植至手上這塊開發(fā)板上。開發(fā)板如下圖所示: 因硬件平臺(tái)不...
2021-08-17 06:39:53
一種大電流無傳感器BLDC電機(jī)控制器電路
在這篇文章中,我們將討論一種大電流無傳感器 BLDC電機(jī)控制器電路,該電路不依賴于霍爾效應(yīng)傳感器來啟動(dòng)操作,而是利用電機(jī)的反電動(dòng)勢進(jìn)行順序輸入
對于正確的換向,大多數(shù)三相 BLDC 驅(qū)動(dòng)器
2023-09-14 16:09:43
位置傳感器與直流無刷電機(jī)有什么關(guān)系
控制它們的導(dǎo)通與截止,使電動(dòng)機(jī)電樞繞組中的電流隨著轉(zhuǎn)子位置的變化按次序換向,形成氣隙中步進(jìn)式的旋轉(zhuǎn)磁場,驅(qū)動(dòng)永磁轉(zhuǎn)子連續(xù)不斷地旋轉(zhuǎn)。位置傳感器來測量轉(zhuǎn)子的位置,電機(jī)控制器通過接受位置傳感器信號來讓
2019-06-28 04:20:10
位置傳感器有哪些應(yīng)用
序換向,形成氣隙中步進(jìn)式的旋轉(zhuǎn)磁場,驅(qū)動(dòng)永磁轉(zhuǎn)子連續(xù)不斷地旋轉(zhuǎn)。直流無刷電機(jī)需要位置傳感器來測量轉(zhuǎn)子的位置,電機(jī)控制器通過接受位置傳感器信號來讓逆變器換相與轉(zhuǎn)子同步來驅(qū)動(dòng)電機(jī)持續(xù)運(yùn)轉(zhuǎn)。盡管直流無刷電機(jī)也
2016-10-09 15:13:14
關(guān)于BLDC電機(jī)控制的所有信息:無傳感器無刷直流電機(jī)控制器
了解無傳感器無刷直流電動(dòng)機(jī)控制器,一些示例IC以及使用此類電動(dòng)機(jī)的一些缺點(diǎn)。有刷和無刷直流電動(dòng)機(jī)的快速回顧無刷直流(BLDC)電機(jī)已比其前身有刷直流電機(jī)(參見下圖)大受歡迎。顧名思義,“有刷
2019-10-25 09:51:07
基于836M直流無刷電機(jī)無傳感器磁場定向控制方案201210MC_BLDCA
參考方案: 基于836M直流無刷電機(jī)無傳感器磁場定向控制方案方案介紹直流無刷電機(jī)由于其效率高、體積小、可靠性高等優(yōu)點(diǎn),使用范圍越來越廣。通常采用梯形波控制,控制簡單,但換向噪聲較大,在一些特定
2018-12-04 09:57:38
基于STM32無位置傳感器無刷直流電機(jī)控制C程序
請問誰做過基于STM32無位置傳感器無刷直流電機(jī)控制系統(tǒng),有沒有STM32無刷直流電機(jī)控制部分的C程序,發(fā)給我參考下吧。
2014-01-18 09:24:22
基于TMS32芯片研制直流無刷電機(jī)控制技術(shù)
設(shè)計(jì)的一種無刷直流電機(jī)的控制器。系統(tǒng)采用TMS320F28027作為控制核心或者純硬件控制系統(tǒng),設(shè)計(jì)電機(jī)驅(qū)動(dòng)電路、電流檢測電路、速度檢測電路、位置檢測電路以及保護(hù)電路等,建立實(shí)物驗(yàn)證平臺(tái),進(jìn)行實(shí)驗(yàn)
2021-04-16 10:35:55
如何去開發(fā)一款基于DSPic33的直流無刷電機(jī)無傳感器控制系統(tǒng)?
如何去開發(fā)一款基于DSPic33的直流無刷電機(jī)無傳感器控制系統(tǒng)?直流無刷電機(jī)無傳感器控制系統(tǒng)的作用是什么?
2021-07-27 07:53:40
如何將無傳感器BLDC電機(jī)控制引入低成本應(yīng)用
。無傳感器系統(tǒng)已出現(xiàn)相當(dāng)長一段時(shí)間,但在過去,它們需要昂貴的控制器才能運(yùn)行除去傳感器所需的算法。數(shù)字信號控制器(DSC)(例如Microchip 的dsPIC33FJ15MC102,批量訂購時(shí),單價(jià)僅約1美元)使無傳感器BLDC電機(jī)控制得以大規(guī)模應(yīng)用。
2020-08-28 08:04:03
怎么使用PSoC 4 BLE的無傳感器磁場定向控制?
我感興趣的是開發(fā)一種藍(lán)牙低能量使能的無刷直流電機(jī)控制器,它使用無傳感器的磁場定向控制來處理電機(jī)速度。研究不同的替代品,我發(fā)現(xiàn)這一應(yīng)用注意到在CyPress PSoC4中實(shí)現(xiàn)無傳感器焦點(diǎn)技術(shù)。同樣
2019-10-17 10:27:11
怎么實(shí)現(xiàn)無刷直流電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)?
直流無刷電機(jī)的工作原理是什么?電機(jī)霍爾傳感器工作原理是什么?怎么實(shí)現(xiàn)無刷直流電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)?
2021-10-09 07:04:15
怎樣去設(shè)計(jì)一種基于STM32的BLDC直流無刷電機(jī)控制器
STM32 BLDC直流電機(jī)控制器由哪些部分組成?怎樣去設(shè)計(jì)一種基于STM32的BLDC直流無刷電機(jī)控制器?
2021-09-17 07:03:26
怎樣通過霍爾傳感器去控制無刷直流電機(jī)呢
什么是直流電機(jī)?有刷直流電機(jī)是怎樣工作的?無刷直流電機(jī)是怎樣工作的?怎樣通過霍爾傳感器去控制無刷直流電機(jī)呢?
2021-09-17 06:19:37
深圳無刷電機(jī)控制器單片機(jī)芯片—EN8F156
。在設(shè)計(jì)中,由于程序在測量轉(zhuǎn)速時(shí),有一個(gè)等待延時(shí)時(shí)間,如果電動(dòng)機(jī)轉(zhuǎn)速較低,則傳感器傳輸?shù)膬蓚€(gè)高電平間隔較大,則必然影響到電機(jī)換向,使電機(jī)失步而停車。無刷電機(jī)控制器單片機(jī)方案設(shè)計(jì)并實(shí)現(xiàn)的無刷直流
2019-03-05 10:08:12
請問怎樣去設(shè)計(jì)無刷電機(jī)控制器?
怎樣去設(shè)計(jì)無刷電機(jī)控制器?無刷電機(jī)控制器的實(shí)現(xiàn)有什么參考價(jià)值?
2021-04-29 07:09:40
采用56F801X的3相無刷直流電機(jī)無傳感器控制參考設(shè)計(jì)
該參考設(shè)計(jì)是3相無刷直流(BLDC)電機(jī)的無傳感器用于風(fēng)機(jī),泵和壓縮機(jī)基于低成本NXP驅(qū)動(dòng)? 56F801X數(shù)字信號控制器(DSC)。該概念是閉環(huán)速度控制的BLDC驅(qū)動(dòng)器,無需位置或速度傳感器它是
2018-07-18 14:13:44
基于MEGA8單片機(jī)的無傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)
基于MEGA8單片機(jī)的無傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)-De ign of Control Sy tem Ba ed on MEGA8 Single Chip Computer for Sen orle and Bru hle DC Motor
摘要針對航模用無傳感器無刷直流電機(jī)具有體
2009-02-09 10:42:40 135
135
135無刷直流電機(jī)無傳感器PWM智能控制器ML4428及其應(yīng)用
ML 4428廣泛應(yīng)用于無刷直流電機(jī)的控制系統(tǒng)。在該控制系統(tǒng)中, 不需要采用霍爾傳感器就可實(shí)現(xiàn)啟動(dòng)和調(diào)速的一切功能,并能確保啟動(dòng)時(shí)電機(jī)不會(huì)反轉(zhuǎn),而且還可縮短啟動(dòng)時(shí)間。本文較詳
2009-04-25 16:07:06110
110基于擾動(dòng)觀測器的無刷直流電機(jī)無位置傳感器控制
討論了無刷直流電機(jī)無位置傳感器控制 提出一種基于擾動(dòng)觀測器的無位置傳感器控制方案。無刷直流電機(jī)電勢平衡方程的非線性由反電勢所引起 如果假設(shè)反電勢為常值擾動(dòng) 就
2009-07-10 15:49:0466
66MC68HC908GP32在無刷無傳感器型直流電機(jī)控制中的應(yīng)
文章介紹了新型微控制器MC68HC908GP32 的主要功能、特點(diǎn),及其在無刷無傳感器型直流電機(jī)控制中的應(yīng)用策略。并介紹了控制系統(tǒng)的硬件實(shí)現(xiàn)及軟件編程技術(shù)。關(guān)鍵詞 MC68HC908GP32
2009-07-16 09:56:0625
25無位置傳感器無刷直流電機(jī)的控制策略
研究了無位置傳感器無刷直流電機(jī)的控制方法,深入分析了反電勢法的原理以及啟動(dòng)等技術(shù)要點(diǎn)。
2009-07-18 16:04:0735
35基于ML4428的無刷直流電機(jī)無傳感器的控制
介紹了目前常用的無位置傳感器無刷直流電動(dòng)機(jī)的控制策略,分析了反電勢檢測換相原理以及ML4428的功能、參數(shù)設(shè)定及應(yīng)用。ML4428 無傳感器平滑
2009-09-04 09:00:26106
106霍爾傳感器應(yīng)用于無刷電機(jī)驅(qū)動(dòng)控制
霍爾傳感器應(yīng)用于無刷電機(jī)驅(qū)動(dòng)控制:討論了利用霍爾元件在無刷電機(jī)控制系統(tǒng)中使用的問題,并對霍爾集成傳感器進(jìn)行了探討。介紹了2種利用霍爾集成傳感器組成無刷電機(jī)控制電路
2009-11-14 14:39:23481
481基于直流變頻技術(shù)的壓縮機(jī)控制器設(shè)計(jì)
基于直流變頻技術(shù)的壓縮機(jī)控制器設(shè)計(jì)
闡述直流無刷電機(jī)的工作原理及其控制器的原理, 分析了其中位置切換、位置檢測、電機(jī)啟動(dòng)3 個(gè)關(guān)鍵技術(shù)。
This paper
2010-02-22 11:48:2748
48基于MI A425的無傳感器無刷直流電機(jī)控制電路設(shè)計(jì)
摘 要:針對航模用無傳感器無刷直流電機(jī)具有體積小、質(zhì)量輕、效率高和可靠性好等特點(diǎn),設(shè)計(jì)開發(fā)了它的專用調(diào)速控制系統(tǒng)。首先分析了無傳感器無刷直流電機(jī)的電路原理。接著
2010-04-26 09:50:2548
48無位置傳感器無刷直流電機(jī)數(shù)字控制系統(tǒng)
介紹了一種基于DSP+CPLD的全數(shù)字方式的無位置傳感器無刷直流電動(dòng)機(jī)控制系統(tǒng),采用速度和電流雙閉環(huán)對無刷電機(jī)進(jìn)行控制,運(yùn)用高度集成化的芯片6AM15作為電機(jī)的驅(qū)動(dòng)電路,同時(shí)選用電
2010-07-14 14:42:2096
96基于FPGA的無位置傳感器無刷電機(jī)控制器
針對Actel公司推出的Fusion系列混合信號FPGA,介紹了一種基于Fusion FPGA的無刷電機(jī)無位置傳感器的控制器。試驗(yàn)結(jié)果表明,采用Fusion混合信號FPGA的無刷電機(jī)控制器具有集成度高,性能
2010-12-17 16:37:5931
31無傳感器無刷直流電機(jī)控制原理
無傳感器無刷直流電機(jī)控制原理
目前常用的無刷直流電機(jī)控制方法可分為開環(huán)控制、轉(zhuǎn)速負(fù)反饋控制和電壓負(fù)反饋加電流正反饋控制
2009-02-09 10:46:563986
3986
無傳感器的直流無刷電機(jī)控制器ML4425及其應(yīng)用(2)
無傳感器的直流無刷電機(jī)控制器ML4425及其應(yīng)用(2)
?
摘要:介紹了ML4425脈寬調(diào)制
2009-07-08 14:19:556257
6257
無傳感器的直流無刷電機(jī)控制器ML4425及其應(yīng)用(1)
無傳感器的直流無刷電機(jī)控制器ML4425及其應(yīng)用(1)??
摘要:介紹了ML4425脈寬調(diào)制電機(jī)控制器的功能及其應(yīng)用。
關(guān)
2009-07-09 10:31:053565
3565
應(yīng)用于光伏水泵系統(tǒng)中的無位置傳感器無刷直流電機(jī)的控制
應(yīng)用于光伏水泵系統(tǒng)中的無位置傳感器無刷直流電機(jī)的控制
摘要:介紹了應(yīng)用于光伏水泵系統(tǒng)中的直流無刷電機(jī)及其控制方法,利用
2009-07-11 10:29:361342
1342
基于DSP的直流無刷電機(jī)控制器的硬件設(shè)計(jì)
基于DSP的直流無刷電機(jī)控制器的硬件設(shè)計(jì)
隨著電力電子技術(shù),新的永磁材料以及具有快速運(yùn)算能力的DSP(數(shù)字信號處理器)的發(fā)展,直流無刷電機(jī)
2009-10-30 07:56:593645
3645
微型無刷直流電機(jī)的無位置傳感器控制
微型無刷直流電機(jī)的無位置傳感器控制
0 引言
??? 在一些應(yīng)用場合要求使用的電機(jī)體積小、效率高、轉(zhuǎn)速高,微型永磁無刷直流電機(jī)能夠較好地滿足要
2009-12-02 09:32:202042
2042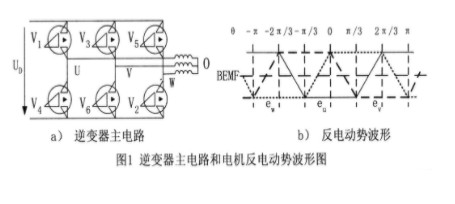
無位置傳感器無刷直流電動(dòng)機(jī)控制方法及其DSP實(shí)現(xiàn)
摘 要:介紹了無位置傳感器無刷直流電動(dòng)機(jī)系統(tǒng)的控制原理,討論了該系統(tǒng)控制的實(shí)現(xiàn)方法,最后對基于數(shù)字信號處理器(DSP)芯片TMS320LF2407A的無位置傳感器無刷直流電動(dòng)機(jī)控制系統(tǒng)的軟、硬件實(shí)現(xiàn)作了詳細(xì)論述。 關(guān)鍵詞:無位置傳感器;無刷直流電機(jī);反電動(dòng)勢
2011-03-01 01:37:58269
269BLMC-H-S-II高壓直流無刷電機(jī)控制器產(chǎn)品技術(shù)手冊
BLMC-H-S-II是為高壓三相六步全波有霍爾傳感器直流無刷電機(jī)設(shè)計(jì)的控制器,最大負(fù)載驅(qū)動(dòng)電流10A至15A。
2011-04-21 11:15:53143
143永磁直流無刷電機(jī)的控制器的研究設(shè)計(jì)
永磁直流無刷電機(jī)的控制器的研究設(shè)計(jì),有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-27 15:28:3938
38基于MEGA8單片機(jī)的無傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)
基于MEGA8 單片機(jī)的無傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)
2016-05-05 11:37:3941
41無位置傳感器無刷直流電機(jī)數(shù)控調(diào)速器設(shè)計(jì)
無位置傳感器無刷直流電機(jī)數(shù)控調(diào)速器設(shè)計(jì)
2016-12-20 22:55:157
7無位置傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)_沈鵬程
無位置傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)_沈鵬程
2017-03-15 11:24:327
7艦船電機(jī)無位置傳感器控制
艦船電機(jī)的傳感器控制是保障艦船電機(jī)穩(wěn)定供電輸出的關(guān)鍵技術(shù),電機(jī)控制容易受到電磁耦合小擾動(dòng)干擾,導(dǎo)致控制精度不高,提出基于滑模觀測器的艦船電機(jī)無位置傳感器控制方法,采用滑模觀測器進(jìn)行艦船電機(jī)輸出的電流
2018-01-19 16:12:400
0進(jìn)行對無刷電機(jī)控制器ML4425/4426的介紹并運(yùn)用
ML4425/4426是Micro Linear公司推出的智能型無刷電機(jī)專用控制器,可用于為三相無刷電機(jī)提供封閉回路的換向控制信號,同時(shí)利用PWM模式還可對電機(jī)速度進(jìn)行控制并對電機(jī)進(jìn)行必要的保護(hù)。ML4425/4426的特點(diǎn)如下:
2018-09-26 15:19:0012394
12394
ML4425對無位置傳感器電機(jī)驅(qū)動(dòng)的注意事項(xiàng)
直流電機(jī)的主控制芯片。ML4425是MicroLinear公司推出的一種智能型無位置傳感器永磁無刷電機(jī)控制器專用電路。該電路內(nèi)置起動(dòng)電路、鎖相環(huán)邏輯換相電路、PWM速度控制電路和過電流保護(hù)電路。該芯片集成度高,應(yīng)用范圍廣,適合各種負(fù)載和電壓的Δ形或Y形繞組的無刷電機(jī)控制系統(tǒng)。
2018-09-30 08:34:007078
7078
如何使用AVR單片機(jī)的直流無刷電機(jī)智能控制系統(tǒng)設(shè)計(jì)
分析目前直流無刷電機(jī)控制器的現(xiàn)狀,設(shè)計(jì)了一種直流無刷電機(jī)通用的控制系統(tǒng),通過開關(guān)選擇有位置傳感器或者無位置傳感器控制模式,實(shí)現(xiàn)了相同額定電壓額定功率的直流無刷電機(jī)控制器的通用,并可通過RS
2018-10-16 10:33:4226
26無霍爾直流無刷電機(jī)轉(zhuǎn)子位置信號如何檢測?
相反的反電動(dòng)勢的過零點(diǎn),就可以獲得轉(zhuǎn)子的幾個(gè)關(guān)鍵位置來實(shí)現(xiàn)無霍爾傳感器的直流無刷電機(jī)換相控制了。2、反電動(dòng)勢三次諧波法將濾波之后的三次諧波通過電壓過零比較器,反映三次諧波相位信息的方波直接輸入DSP
2019-04-28 20:19:0313413
13413基于微控制器實(shí)現(xiàn)無傳感器BLDC電機(jī)平順快速啟動(dòng)的設(shè)計(jì)淺析
低噪音且高耐用性的無刷直流電機(jī)廣泛用于許多領(lǐng)域,包含工業(yè)應(yīng)用、汽車及家庭。本文說明借由使用微控制器偵測轉(zhuǎn)子初始位置以進(jìn)行電機(jī)控制的方法,對此等電機(jī)的控制非常有幫助。此方法解決許多容易發(fā)生在無傳感器電機(jī)上的各種問題,借由平順且快速的高扭力啟動(dòng),實(shí)現(xiàn)極致高效系統(tǒng)。
2019-03-06 13:38:383678
3678
直流無刷電機(jī)中霍爾傳感器的2種安裝方式
就用來記錄直流無刷電機(jī)的轉(zhuǎn)子的位置,從而控制換相功率,在三相直流無刷電機(jī)里,用三個(gè)霍爾 傳感器 就可以記錄六個(gè)相位的位置。 隨著 電力電子 技術(shù)的發(fā)展,無刷直流電機(jī)得到了越來越廣泛的應(yīng)用,在電動(dòng)車輛、家用電器、紡織機(jī)械等領(lǐng)
2019-07-17 10:02:1611485
11485
為什么說BLDC無刷電機(jī)采用無位置傳感器更具優(yōu)勢?
很多特定的條件下,無位置傳感器的無刷電機(jī)就成為了很多用戶的理想選擇。風(fēng)機(jī)驅(qū)動(dòng)用無位置傳感器BLDC無刷電機(jī)采用有位置傳感器驅(qū)動(dòng)零碎,是一種正在發(fā)展的新型直流無刷電機(jī)。因?yàn)樵谕ǔ5牡?b class="flag-6" style="color: red">直流無刷電機(jī)及中擱置
2019-07-30 18:46:457009
7009直流無刷電機(jī)驅(qū)動(dòng)控制采用無位置傳感器的優(yōu)缺點(diǎn)
無位置控制技術(shù)的關(guān)鍵在于轉(zhuǎn)子位置準(zhǔn)確測試,無位置傳感器控制技術(shù)發(fā)展至今,已經(jīng)出現(xiàn)很多控制策略,直流無刷電機(jī)驅(qū)動(dòng)推薦其中應(yīng)用比較的廣泛的有:反電動(dòng)勢過零測試法、線反電動(dòng)勢過零法、滑模觀測器法等。而直流
2019-08-14 22:46:567680
7680直流無刷電機(jī)轉(zhuǎn)子位置傳感器特點(diǎn)/工作原理/分類
直流無刷電機(jī)控制系統(tǒng)中,電機(jī)的換相是由轉(zhuǎn)子的位置決定的,因此必須有轉(zhuǎn)子位置傳感器對轉(zhuǎn)子位置進(jìn)行實(shí)時(shí)檢測。
2020-04-03 10:27:5513353
13353
無感直流無刷電機(jī)的轉(zhuǎn)子位置檢測分析
直流無刷電機(jī)為獲得轉(zhuǎn)子當(dāng)前位置,需要采用某種轉(zhuǎn)子位置檢測環(huán)節(jié)。在有位置傳感器的系統(tǒng)中,轉(zhuǎn)子位置的檢測是通過一系列霍爾效應(yīng)傳感器來實(shí)現(xiàn)的。霍爾效應(yīng)傳感器能夠感知轉(zhuǎn)子永磁磁極的位置。但位置傳感器的存在
2020-04-22 11:39:058248
8248
闡述直流無刷電機(jī)無位置傳感器控制的發(fā)展
如前所述,直流無刷電機(jī)的工作原理必須有轉(zhuǎn)子磁場位置的信息,以控制逆變器功率器件的開/關(guān)實(shí)現(xiàn)繞組的換相。例如,三相六狀態(tài)運(yùn)行的無刷電機(jī)在內(nèi)部安放三個(gè)轉(zhuǎn)子位置傳感器確定六個(gè)換相點(diǎn)時(shí)刻。傳統(tǒng)的直流無刷電機(jī)
2020-05-09 15:01:111834
1834直流無刷電機(jī)方波控制
方波直流無刷電機(jī)轉(zhuǎn)子位置傳感器和控制器比較簡單、體積小、控制成本低,在直流無刷電機(jī)中占有很高的比例。控制器的產(chǎn)量很大,特別是電動(dòng)自行車的控制器,全國的產(chǎn)量非常大,每年要生產(chǎn)數(shù)千萬只,其中
2020-05-11 09:46:363911
3911東昊電機(jī)永磁無刷直流電機(jī)驅(qū)動(dòng)的無傳感器控制
系統(tǒng)的電子部分,然而位置傳感器需要相當(dāng)大的工時(shí)和電機(jī)的空間用于安裝。這使得在永磁無刷直流電機(jī)驅(qū)動(dòng)系統(tǒng)的控制中,無位置傳感器的運(yùn)行更加重要。 lw
2020-05-28 08:39:051352
1352簡單介紹一下常用的幾種無位置傳感器的控制方式
近年來,直流無刷電機(jī)的無位置傳感器技術(shù)日益受到人們的關(guān)注,無位置傳感器控制技術(shù)已成為直流無刷電機(jī)控制技術(shù)的一個(gè)發(fā)展方向。下面就簡單介紹一下常用的幾種無位置傳感器控制方式: 1、反電勢過零檢測法 在
2020-08-05 11:22:306881
6881直流無刷電機(jī)控制器程序流程圖
直流無刷電機(jī)控制器程序流程圖(新型電源技術(shù)論文)-直流無刷電機(jī)控制器程序流程圖? ? ? ? ? ? ? ? ? ? ? ? ?
2021-09-18 18:02:25132
132基于單片機(jī)24V直流無刷電機(jī)電動(dòng)車控制器設(shè)計(jì)
該設(shè)計(jì)為24V 有感無刷電機(jī)直流電機(jī)控制器電路板設(shè)計(jì),電路采用單片機(jī)STC12C5A60S2,IR公司生產(chǎn)的IR2104作為驅(qū)動(dòng)電路的驅(qū)動(dòng)芯片。霍爾為0°、60°、120°,功率變換電路采用6個(gè)N道
2021-11-05 14:06:0350
50知識(shí)篇:直流無刷電機(jī)控制器之方波控制
直流無刷電機(jī)控制器被廣泛應(yīng)用無電動(dòng)自行車的控制,中國自行車協(xié)會(huì)數(shù)據(jù)顯示,2021年我國電動(dòng)自行車的保有量達(dá)到了3.4億輛,截至去年底,我國機(jī)動(dòng)車的保有量為3.95億輛,而直流無刷電機(jī)控制器是不可或缺
2023-01-04 13:56:494886
4886
無刷電機(jī)位置傳感器的作用及其布局方面的注意事項(xiàng)
本文將介紹“無刷電機(jī)位置傳感器的作用及其布局”相關(guān)的內(nèi)容,這也是在“無刷電機(jī)有傳感器驅(qū)動(dòng)和無傳感器驅(qū)動(dòng)的特征及區(qū)分使用”中“無刷電機(jī)有位置傳感器的驅(qū)動(dòng)”應(yīng)注意的要點(diǎn)。在無刷電機(jī)使用的位置傳感器通常是磁傳感器(霍爾元件,霍爾IC)。
2023-02-15 16:12:074186
4186
無刷電機(jī)常見故障 無刷電機(jī)控制器壞了怎樣維修
無刷電機(jī)控制器(也稱為驅(qū)動(dòng)器)是控制無刷電機(jī)正常運(yùn)行的關(guān)鍵部件,如果控制器壞了,無刷電機(jī)就不能正常工作。
2023-03-08 16:44:2619503
19503
無刷直流電機(jī)控制器接線說明
無刷直流電機(jī)(BLDC)控制器的接線是一個(gè)技術(shù)性很強(qiáng)的過程,涉及到電機(jī)、控制器、傳感器等多個(gè)組件的配合。 無刷直流電機(jī)控制器接線概述 了解組件 :在開始接線之前,首先需要了解無刷直流電機(jī)、控制器
2024-09-03 10:28:364991
4991無刷直流電機(jī)控制器的工作過程
無刷直流電機(jī)(BLDC)控制器的工作過程是一個(gè)涉及電機(jī)控制理論、電子電路設(shè)計(jì)、微控制器編程和電機(jī)驅(qū)動(dòng)技術(shù)等多個(gè)領(lǐng)域的復(fù)雜話題。 無刷直流電機(jī)控制器概述 無刷直流電機(jī)(BLDC)控制器的主要任務(wù)是控制
2024-09-03 10:30:061342
1342利用無刷直流電機(jī)簡化傳感器式電機(jī)控制
電子發(fā)燒友網(wǎng)站提供《利用無刷直流電機(jī)簡化傳感器式電機(jī)控制.pdf》資料免費(fèi)下載
2024-09-24 11:07:140
0直流無刷電機(jī)應(yīng)用原理與控制方法是什么?
自動(dòng)化、電動(dòng)汽車和航空航天等,直流無刷電機(jī)都得到了廣泛的應(yīng)用。 一、直流無刷電機(jī)的應(yīng)用原理 直流無刷電機(jī)主要由定子、轉(zhuǎn)子和控制器三部分組成。定子由繞組和磁鐵組成,轉(zhuǎn)子由永磁體和導(dǎo)體組成。控制器負(fù)責(zé)驅(qū)動(dòng)電機(jī)的運(yùn)行。 定子:定子是電機(jī)的固定部
2024-10-21 14:15:421930
1930直流無刷電機(jī)控制,國產(chǎn)芯片解決方案推薦——NSUC1610控制器+MT6701霍爾傳感器
直流無刷電機(jī)控制,國產(chǎn)芯片解決方案推薦——NSUC1610控制器+MT6701霍爾傳感器。
2025-12-15 10:28:151177
1177
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論