") 使用位置傳感器進(jìn)行無刷電機(jī)控制
使用位置傳感器進(jìn)行無刷電機(jī)控制

引言
當(dāng)前,電機(jī)設(shè)計(jì)正朝著“無位置傳感器”的方向發(fā)展。 那么,電機(jī)中是否還需要位置傳感器呢?這個(gè)問題的完整答案相當(dāng)復(fù)雜,但總體而言,位置傳感器仍將長(zhǎng)期存在。在電動(dòng)工具等應(yīng)用中,采用無傳感器設(shè)計(jì)的方波驅(qū)動(dòng)無刷直流電機(jī)或場(chǎng)定向控制 (FOC) 無刷交流電機(jī),確實(shí)可以實(shí)現(xiàn)無需任何旋轉(zhuǎn)角度傳感器即可工作。但實(shí)際情況是,工業(yè)和人形機(jī)器人、自主移動(dòng)機(jī)器人和直線電機(jī)運(yùn)輸系統(tǒng)等終端設(shè)備,旋轉(zhuǎn)角度傳感器或線性位置傳感器依然是不可或缺的關(guān)鍵組件。
使用位置傳感器進(jìn)行無刷電機(jī)控制
位置傳感器不僅用于無刷直流電機(jī)或無刷交流電機(jī)的定子電流換向,還用于速度和位置控制。工業(yè)多軸機(jī)器人通常在電機(jī)軸和機(jī)器人軸之間裝有一個(gè)齒輪。與電機(jī)軸耦合的旋轉(zhuǎn)角度傳感器不僅需要檢測(cè)轉(zhuǎn)子角度,還需要計(jì)算電機(jī)軸的轉(zhuǎn)數(shù),從而控制相應(yīng)機(jī)器人軸的等效絕對(duì)角度位置。編碼器類型因具體應(yīng)用而異。
增量和絕對(duì)編碼器
增量編碼器通常使用 ABZ 數(shù)字或模擬單向接口,其中兩個(gè)正交編碼的數(shù)字脈沖序列信號(hào)(A 和 B)或兩個(gè)模擬正弦/余弦信號(hào)(A 和 B)可實(shí)現(xiàn)低延遲相對(duì)角度測(cè)量,分辨率從約 10 位到最高 28 位不等。可選索引(Z 或 I)可提供絕對(duì)機(jī)械角度信息。增量編碼器不會(huì)在啟動(dòng)時(shí)提供絕對(duì)角度,而需要在索引出現(xiàn)之前旋轉(zhuǎn)最多一周。因此,這些編碼器非常適合需要極低延遲 (<1μs) 但不需要在啟動(dòng)時(shí)獲得絕對(duì)角度的變速應(yīng)用。
相反,單轉(zhuǎn)或多轉(zhuǎn)絕對(duì)旋轉(zhuǎn)編碼器在啟動(dòng)時(shí)可提供絕對(duì)角度位置。它們配備雙向 RS-485 接口,支持特定于供應(yīng)商的協(xié)議,還可實(shí)現(xiàn)時(shí)間觸發(fā)角度測(cè)量并提供旋轉(zhuǎn)速度和旋轉(zhuǎn)圈數(shù)等信息。角度分辨率通常從 10 位到 >30 位不等,延遲低至 10μs,可滿足各種工業(yè)應(yīng)用。位置分辨率通常取決于通過數(shù)字接口傳輸?shù)臄?shù)據(jù)格式。例如,采用 20 位整數(shù)格式的角度分辨率為 360/220;0h = 0 度、0xFFFFF = 360 度 - 360/220。系統(tǒng)整體噪聲明顯高于量化噪聲;該效應(yīng)由有效位數(shù) (ENOB) 表征。
方程式 1 通過角度的標(biāo)準(zhǔn)偏差(以度為單位測(cè)得)計(jì)算角度的 ENOB:

方程式 1
角度噪聲信號(hào)的均方根等于標(biāo)準(zhǔn)偏差 (1 σ)。圖 1 展示了角度精度;相關(guān)角度誤差大于標(biāo)準(zhǔn)偏差。角度精度不僅取決于通常采用 6 σ 值的峰值噪聲,還取決于單轉(zhuǎn)范圍內(nèi)的非線性度。
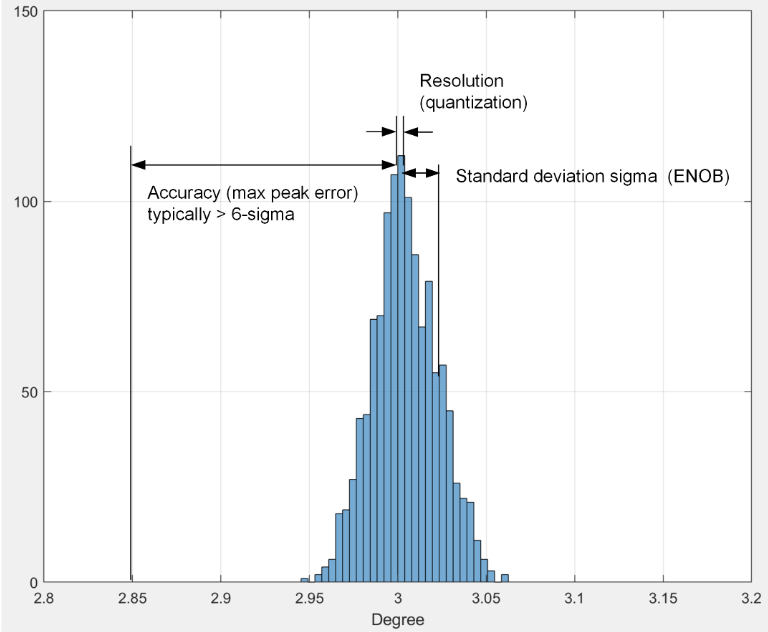
圖 1:靜態(tài)角度分布
編碼器的 FOC 電機(jī)控制技術(shù)和要求
圖 2 中顯示的FOC 方法是一種高性能技術(shù),可根據(jù)轉(zhuǎn)子磁通角控制生成的定子電流矢量,從而通過永磁同步電機(jī)最大限度地增加轉(zhuǎn)矩。FOC可提供平滑的轉(zhuǎn)矩以及從靜止到高速運(yùn)行的快速瞬態(tài)響應(yīng)。精確、低延遲的轉(zhuǎn)子磁場(chǎng)角度測(cè)量會(huì)將三個(gè)定子相電流(iU、iV和 iW)分解至轉(zhuǎn)子磁場(chǎng)定向坐標(biāo)系中,其中 iq為轉(zhuǎn)矩生成電流、id為弱磁電流。
在人形機(jī)器人等終端設(shè)備中,絕對(duì)旋轉(zhuǎn)角度的測(cè)量精度通常為 1 度至 0.1 度,ENOB 為 12 位至 15 位,采樣率為 8kHz 至 32kHz。旋轉(zhuǎn)角度與電機(jī)相電流同時(shí)檢測(cè)。低于 20μs 的低延遲角度測(cè)量為微控制器 (MCU)提供了足夠的時(shí)間來運(yùn)行控制算法和在下一個(gè) PWM 周期更新脈寬調(diào)制器 (PWM)。
不同于旋轉(zhuǎn)電機(jī),基于直線電機(jī)的運(yùn)輸系統(tǒng)需要絕對(duì)線性位置檢測(cè),但仍然應(yīng)用FOC來獲得最大轉(zhuǎn)矩。12 位位置分辨率(延遲低于 100μs)通常足夠。
此外,要在工業(yè)機(jī)械中實(shí)現(xiàn)國(guó)際電工委員會(huì) 62061 或國(guó)際標(biāo)準(zhǔn)化組織 (ISO) 13849 等標(biāo)準(zhǔn)規(guī)定的功能安全,需要根據(jù)安全完整性等級(jí)或性能等級(jí)確定經(jīng)安全認(rèn)證的編碼器,并使用位置傳感器進(jìn)行額外診斷,從而檢測(cè)隨機(jī)硬件故障。在汽車應(yīng)用中,根據(jù) ISO 26262 標(biāo)準(zhǔn)設(shè)計(jì)的系統(tǒng)會(huì)在系統(tǒng)啟動(dòng)期間運(yùn)行診斷,而工業(yè)系統(tǒng)通常全天候運(yùn)行,因此需要在正常運(yùn)行期間進(jìn)行持續(xù)診斷。
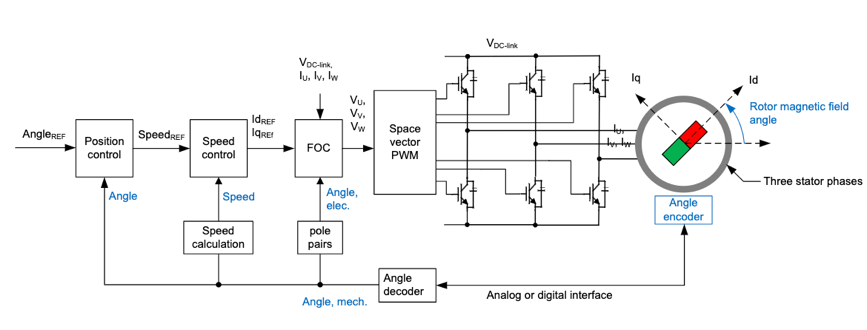
圖 2:級(jí)聯(lián)位置、速度和 FOC
位置傳感器技術(shù)
主要類型的位置傳感器包括光學(xué)傳感器、磁傳感器、電感式傳感器或電容式傳感器。光學(xué)傳感器通常可提供最高分辨率(但磁傳感器和電感式傳感器更可靠),并且可以降低系統(tǒng)總成本。在工業(yè)或汽車系統(tǒng)中,附近線路中存在大電流流動(dòng),這就要求使用不受雜散磁場(chǎng)影響的傳感器技術(shù)(例如電感式)。電容式傳感器的分辨率通常低于電感式傳感器和磁傳感器,而且電容式傳感器并不常見。
對(duì)于惡劣環(huán)境(例如電機(jī)集成導(dǎo)致的高溫)中的成本敏感型系統(tǒng),TI 提供磁性和電感式位置傳感器。
磁性位置傳感器
磁編碼器提供了一種經(jīng)濟(jì)高效的方法,可用于檢測(cè)旋轉(zhuǎn)或線性運(yùn)動(dòng),同時(shí)在含有灰塵、油和水的惡劣環(huán)境中保持抗擾性。磁性位置傳感器可檢測(cè)磁場(chǎng)變化,將磁場(chǎng)變化轉(zhuǎn)換為電信號(hào)并生成輸出信號(hào)。磁性位置傳感器技術(shù)種類繁多,包括霍爾效應(yīng)、AMR、隧穿磁阻 (TMR) 和巨磁阻 (GMR)。表 1 列出了每種傳感器的優(yōu)缺點(diǎn)。

表 1:磁傳感器技術(shù)比較:主要特性和規(guī)格
(1) 增益和偏移校準(zhǔn)后
(2) 增益、偏移和正交性校準(zhǔn)后
采用 3D 霍爾效應(yīng)線性傳感器的線性位置示例
在有效載荷載體以 5m/s 至 15m/s 的速度快速移動(dòng)的直線電機(jī)運(yùn)輸系統(tǒng)中,12 位位置分辨率(延遲低于 100μs 且采樣率 ≤8kHz)通常足夠,而多個(gè)位置傳感器通過高速串行外設(shè)接口 (SPI) 總線連接到單個(gè) MCU,如圖 3 中所示。
TMAG5170 3D 霍爾效應(yīng)傳感器具有三個(gè)主要優(yōu)勢(shì):高精度、低延遲和電路板靈活放置。全溫度范圍內(nèi)的靈敏度誤差漂移小于 2.8%。10MHz SPI 可實(shí)現(xiàn)低延遲。此外,板載 3D 感應(yīng)元件支持可配置的 XY、YZ 或 XZ 感應(yīng)方向,從而提高相對(duì)于磁體放置傳感器時(shí)的靈活性。
具有四通道 3D 霍爾效應(yīng)傳感器的低延遲精確線性位置檢測(cè)參考設(shè)計(jì)采用以 25mm 間隔放置的 TMAG5170,以實(shí)現(xiàn)精確的低延遲線性位置檢測(cè)。C2000 MCU以 ≥ 8kHz 的采樣率從全部四個(gè)TMAG5170傳感器讀取磁場(chǎng) Z 和 X 的數(shù)據(jù),并計(jì)算移動(dòng)磁體的位置,誤差小于 0.15mm、延遲低于 57.5μs。
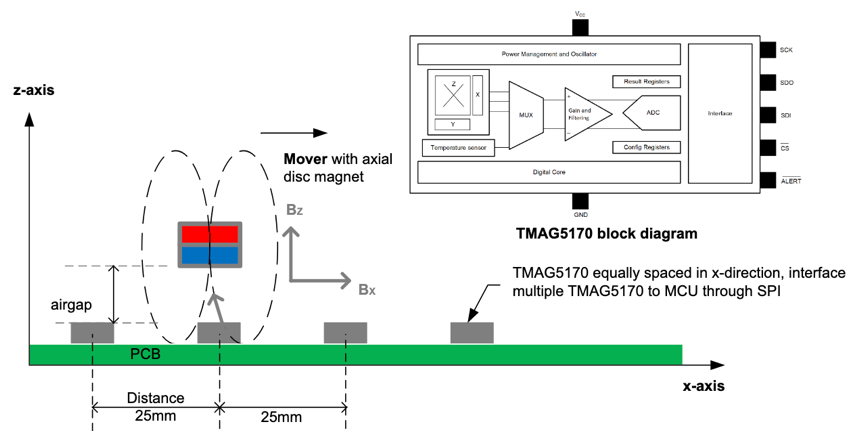
圖 3:直線電機(jī)運(yùn)輸系統(tǒng)中的 TMAG5170
采用 AMR 傳感器的旋轉(zhuǎn)角度示例
AMR 傳感器包含四個(gè)磁阻惠斯通電橋,其中兩個(gè)電橋的輸出端子的電壓差將反映外部磁場(chǎng)強(qiáng)度。
與霍爾效應(yīng)傳感器相比,AMR 傳感器具有更高的工作頻率和更高的信噪比 (SNR)。與 GMR 和 TMR 傳感器相比,AMR 傳感器的正交誤差相對(duì)可以忽略不計(jì)。在需要高精度編碼器的伺服驅(qū)動(dòng)器等應(yīng)用中,AMR 傳感器通常更適合,因?yàn)樗鼈兙哂懈叩拇艌?chǎng)耐受度,可實(shí)現(xiàn)更強(qiáng)的整體抗擾性。
TMAG6180-Q1 2D AMR 角度傳感器可測(cè)量磁場(chǎng),并產(chǎn)生兩個(gè)與這些磁場(chǎng)成正比的差分(或單端)電壓輸出。TMAG6180-Q1的延遲低于 2μs,還可以更大限度地降低高速運(yùn)動(dòng)引起的角度誤差。集成的霍爾效應(yīng)開關(guān)可產(chǎn)生兩個(gè)數(shù)字象限輸出(Q0 和 Q1),從而將角度檢測(cè)范圍擴(kuò)展到 360 度。結(jié)合正弦和余弦波形,Q0 和 Q1 數(shù)字輸出足以確定絕對(duì)旋轉(zhuǎn)角度。圖 4 是 TMAG6180-Q1 的功能方框圖,圖 5 則顯示了輸出波形。
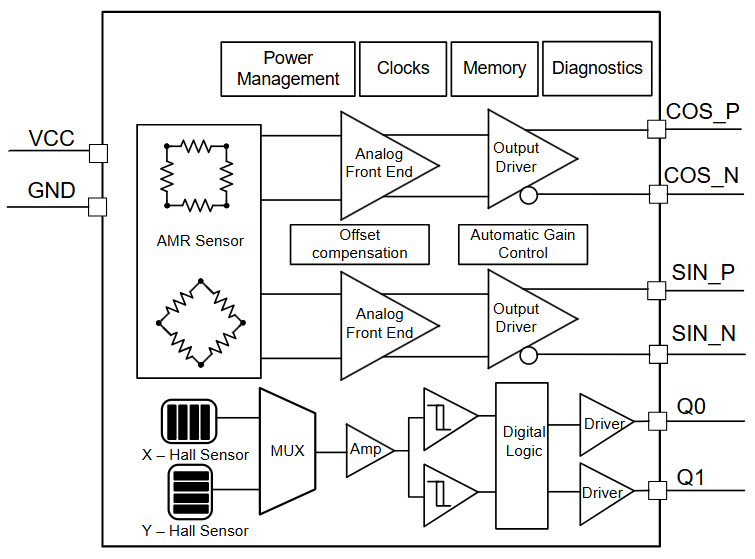
圖 4:TMAG6180-Q1 方框圖
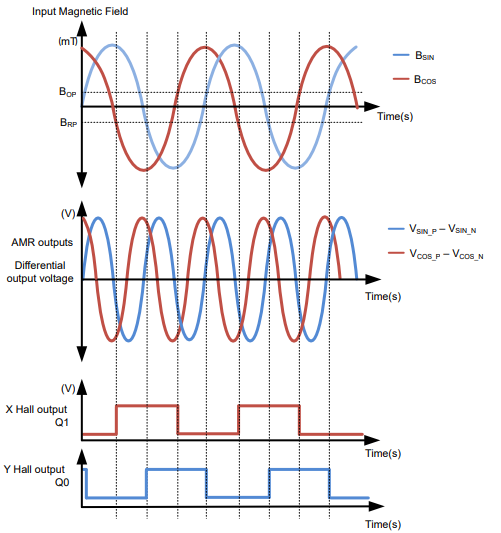
圖 5:TMAG6180-Q1 輸出波形
為了獲得更高的精度,MCU 應(yīng)集成一個(gè)高速、高 ENOB 的模數(shù)轉(zhuǎn)換器,應(yīng)能夠運(yùn)行有限脈沖響應(yīng)濾波器等數(shù)字濾波器來消除信號(hào)鏈噪聲,并應(yīng)具有額外的補(bǔ)償算法來消除機(jī)械容差及信號(hào)鏈增益和偏移不匹配造成的誤差。采用 AMR 傳感器的高分辨率低延遲緊湊型絕對(duì)角度編碼器參考設(shè)計(jì)是一種小尺寸(直徑為 3cm)參考設(shè)計(jì),采用TMAG6180-Q1和MSPM0G3507 MCU,集成雙 12 位 ADC(支持高達(dá) 128 倍的過采樣)并配備一個(gè)數(shù)學(xué)加速器,有助于提高效率并降低系統(tǒng)成本。該系統(tǒng)可用于角度測(cè)量,SNR 達(dá) 94.7dB(相當(dāng)于 15.4 ENOB)且角度誤差低于 0.05°,如圖 6 所示。
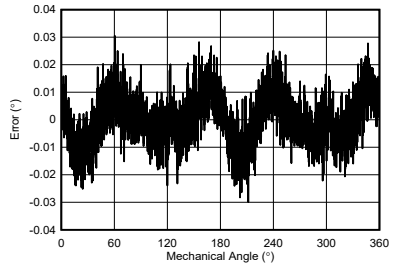
圖 6:偏移校準(zhǔn)后 25°C 溫度下單轉(zhuǎn)范圍內(nèi)的角度誤差
電感式位置檢測(cè)
與磁傳感器相比,電感式角度傳感器具有多項(xiàng)優(yōu)勢(shì)。它們的主要優(yōu)勢(shì)是對(duì)外部直流電場(chǎng)具有固有的磁場(chǎng)抗擾性。此外,在電感技術(shù)中,只需要將一個(gè)導(dǎo)電金屬靶標(biāo)(無需磁體)靠近感應(yīng)線圈,即可確定金屬靶標(biāo)圍繞電機(jī)軸旋轉(zhuǎn)時(shí)的位置。
圖 7 顯示了使用兩個(gè)LDC5072-Q1電感式傳感器(每個(gè)感應(yīng)線圈一個(gè))的絕對(duì)編碼器。游標(biāo)編碼需要使用兩個(gè)感應(yīng)線圈:外部傳感器靶標(biāo)可以有 16 個(gè)金屬位置;內(nèi)部靶標(biāo)可以有 15 個(gè)金屬位置。等間距排布兩個(gè)靶標(biāo),這樣可在整個(gè)旋轉(zhuǎn)過程中強(qiáng)制形成獨(dú)特模式,從而能夠以較高的精度獲得絕對(duì)角度。
機(jī)械旋轉(zhuǎn)變壓器的功能與絕對(duì)電感式編碼器相同,但尺寸和重量等方面存在不足。電感式編碼解決方案可直接構(gòu)建在印刷電路板上,而旋轉(zhuǎn)變壓器則構(gòu)建在具有銅線繞組齒槽的厚鋼疊層上。旋轉(zhuǎn)變壓器的機(jī)械結(jié)構(gòu)也導(dǎo)致其構(gòu)建成本昂貴。最后,功耗問題也尤為突出:旋轉(zhuǎn)變壓器極易消耗 500mW 的功率(假設(shè) 7VRMS下 70mA 電流)。
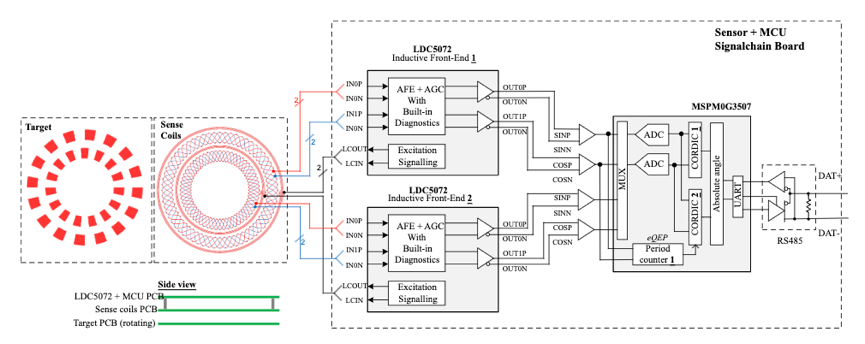
圖 7:使用 LDC5072-Q1 的絕對(duì)編碼器
結(jié)語
如何選擇最合適的位置傳感器取決于電機(jī)驅(qū)動(dòng)系統(tǒng)的要求,其中成本、性能、工作溫度和尺寸均是最重要權(quán)衡因素。另一方面,還需考慮是否在工業(yè)或汽車解決方案中添加額外的診斷或功能安全設(shè)計(jì)。每種電機(jī)和編碼器類型都有各自的要求,因此必須選擇最適合應(yīng)用的傳感器類型。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
31227瀏覽量
223054 -
電機(jī)控制
+關(guān)注
關(guān)注
3601文章
2147瀏覽量
278367 -
編碼器
+關(guān)注
關(guān)注
45文章
3984瀏覽量
143083 -
德州儀器
+關(guān)注
關(guān)注
123文章
1994瀏覽量
145240 -
位置傳感器
+關(guān)注
關(guān)注
3文章
306瀏覽量
28665
原文標(biāo)題:技術(shù)干貨 | 如何選擇電機(jī)控制中的位置傳感器?
文章出處:【微信號(hào):tisemi,微信公眾號(hào):德州儀器】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
無刷電機(jī)位置傳感器布局的示意圖解讀
無位置傳感器直流無刷電機(jī)的退磁控制
無位置傳感器直流無刷電機(jī)軟件起動(dòng)
位置傳感器有哪些應(yīng)用
無傳感器無刷電機(jī)驅(qū)動(dòng)控制器系統(tǒng)簡(jiǎn)介
無位置傳感器的直流無刷電機(jī)控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
位置傳感器與直流無刷電機(jī)有什么關(guān)系
霍爾傳感器應(yīng)用于無刷電機(jī)驅(qū)動(dòng)控制
基于FPGA的無位置傳感器無刷電機(jī)控制器
超高速永磁無刷電機(jī)無位置傳感器半閉環(huán)啟動(dòng)法
艦船電機(jī)無位置傳感器控制
為什么說BLDC無刷電機(jī)采用無位置傳感器更具優(yōu)勢(shì)?
直流無刷電機(jī)轉(zhuǎn)子位置傳感器特點(diǎn)/工作原理/分類
闡述直流無刷電機(jī)無位置傳感器控制的發(fā)展
無刷電機(jī)位置傳感器的作用及其布局方面的注意事項(xiàng)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論