和 靜止 目 標對動 目 標檢測 的千擾 。4. 2 經典恒虛警 算法分析 圖 4-1 為雷達信 號處理流程 , 如 圖表示 回 波信 號經處理后在距離 維和速度維的能量分布情況。 若 當 前檢測
2018-02-28 09:19:59
和 靜止 目 標對動 目 標檢測 的千擾 。4. 2 經典恒虛警 算法分析圖 4-1 為雷達信 號處理流程 , 如 圖表示 回 波信 號經處理后在距離 維和速度維的能量分布情況。 若 當 前檢測 單元 為
2018-03-29 10:53:32
、雷達目標動態監測、高分辨率雷達遙感圖像數據分析等領域,更是要求高速度、高精度、高實時性以及高可靠性的高速數據采集與處理技術。另一方面,雷達回波系統的應用領域也在不斷擴展。近些年來已廣泛應用于各種
2016-07-01 11:47:58
本人近段時間對雷達信號檢測與判決做了一些學習和研究,還處在入門階段,現應用一個仿真實例對動目標信號的檢測判決算法做了分析和驗證。其中包括MTI,脈沖多普勒處理,CFAR自適應門限檢測等。這里分享一下,大家一起研究研究,還請各位前輩指點。謝謝。
2013-11-02 22:23:25
)/顯示控制等內容。目前正在研究項目是基于FPGA ZCU102平臺的點云算法開發(YOLO-Complex),希望借助北醒TFmini-S 測距/避障激光雷達傳感器可以進行特定場景的點云數據采集,以供算法
2020-05-28 17:32:37
象素點的灰度變化具有連續性,目標邊界的灰度是漸變的,不是突變的,如下圖所示。 經實踐證明,文獻[1]中的算法不適合印刷電路板,分割的效果也不是很好,因為平均灰度不一定是直方圖的波谷,而且在PCB
2018-08-29 10:53:08
在圖像處理時,受外界光線的干擾一般比較大,假如在閾值分割時采用固定閾值,那么在環境改變時分割效果受影響極大,那么為了避免此影響就必須采用動態閾值,自動求出合適的閾值,將目標圖像和背景圖像分割
2016-04-27 14:22:58
這是一個基于ARM920T內核的24GHZ微波雷達測速儀設計與算法研究的方案,希望能對大家有參考幫助。導讀:為了提高目前公路交通中對車輛速度的監測手段,提出一種基于ARM(advancedRISC
2014-07-24 14:14:20
,采用該方法獲得圖像的邊緣點集;將邊緣點集中曲率較大的邊緣點作為候選邊界點推薦給用戶;用戶通過主觀判斷,在候選邊界點中選擇合適的“初始邊界點”,算法便可采用GAC模型完成對目標的分割。實驗結果表明,改進
2009-09-19 09:19:45
視頻目標跟蹤,本文將首先向大家介紹常用的粒子濾波視頻目標跟蹤算法,對其原理進行簡單的分析,為后續進一步選擇和應用算法實現目標跟蹤提供基礎。一、機器視覺及相關理論及OpenCv 機器視覺是人工智能領域正在
2018-09-21 10:42:31
實時性的前提下,進一步提升了近兩個百分點的精度。在本文的研究中,基于 YOLOX 目標檢測算法 進行損失函數的優化,以改善遮擋目標和小目標等困難目標檢測精度較低的問題。簡而言之,本文的主要貢獻如下
2023-03-06 13:55:27
目標跟蹤算法,并實現穩定、可靠而精確的目標跟蹤意義重大。 本文選用當今最為流行、應用最廣泛的雷達和紅外作為傳感器,在紅外/雷達雙模導引頭的多傳感器平臺下展開研究,設計并仿真實現了更接近真實的軍事與民用
2018-12-05 15:16:23
,對圖像目標的提取、測量等都離不開圖像分割。分割的準確性直接影響后續任務的有效性,因此圖像分割具有十分重要的意義。 遺傳算法具有全局搜索能力,是一種迭代式的優化算法,在分割圖像時常用來幫助確定最佳
2009-09-19 09:36:47
效果。
方法
如前所述,我們的方法由手勢點云模型和定制的CNN組成。首先,該模型可以描述手勢的變化趨勢,然而,在空間中,構建模型時存在著一個挑戰:由于毫米波雷達是全向的,因此遠程手勢會受到周圍任何反射
2024-06-05 19:09:46
多站低頻雷達具有全天候全天時的工作能力,可以探測葉簇遮蔽環境下的運動目標,能夠滿足安防和生態保護領域對叢林目標探測的迫切需求,具有低成本、低硬件復雜度和大范圍目標探測的優點。本文基于實際多站低頻
2021-12-20 15:49:31
進行驗證。能夠實現LFMCW雷達多目標檢測方法的硬件電路設計。弄清LFMCW雷達的工作原理,系統中傳輸的信號特點;研究檢測算法的特點,用verilog語言實現檢測算法,在獲得滿意仿真結果的基礎上,完成電路的FGPA驗證分析。QQ2784829569
2018-04-08 23:48:36
點擊上方“AI算法修煉營”,選擇“星標”公眾號精選作品,第一時間送達這篇文章是激光雷達點云數據分割算法的嵌入式平臺上的部署實現。主要的創新點有兩點:一是利用多路分支采用不同分辨率輸入后再...
2021-12-21 08:28:22
看到這種低成本的激光雷達,從研發、樣品到商用,可能會比原來預想的周期更快。因為不是一家激光雷達公司在努力,而是整個產業鏈都在努力。點云是在同一空間倡導系下表達目標空間分布和目標表面特性的海量點云數據。點
2017-09-08 17:24:48
,大大提高了背景抑制能力。但是這種利用強度像均值的背景抑制算法要求目標區占有較大的面積,對于小目標圖像其抑制效果變差。分析了強度像的直方圖特征,提出了一種熵閾值分割抑制距離像背景算法,此算法將強度像
2009-08-08 09:40:21
雷達系統具有較強的吸引力,主要在于發射機可以根據接收機的反饋、并結合先驗知識及測量、儲存信息實現發射波形的最佳動態選擇。例如,若接收機在某方向檢測到由于雜波或非威脅目標反射的回波時,可通過發射波束形成
2018-08-04 09:19:48
車載雷達通信系統的研究意義車載雷達通信系統的研究現狀
2020-12-18 07:32:53
車輛牌照識別系統的原理及算法研究本文對車輛牌照自動識別系統中圖象預處理、特征提取和字符識別等環節涉及的新算法、新技術以及系統整體設計做了一個比較全面的論述,同時針對目前的研究現狀,對一些關鍵
2009-12-02 12:59:27
了具體的匹配準則和算法流程;對車載終端與監控中心交互數據的傳輸流程進行了詳細分析,設計了監控中心數據庫,并根據通信協議,解析了具體的數據包實例;最后,在對高速公路GPS 車輛動態監控技術研究的基礎上
2009-04-16 13:47:49
孤立點挖掘是數據挖掘的重要研究方向之一,其目標是發現數據集中不具備數據一般特性的數據對象。傳統孤立點挖掘算法通常基于項集屬性,不適用于多目標決策和綜合評價。該
2009-04-14 09:12:24 19
19 全局閾值分割對于小目標物效果不理想,動態閾值容易產生陰影等干擾,但綜合考慮全局閾值和動態閾值可以達到比較理想的結果。模糊C均值算法用于灰度圖像分割是一種非監督模
2009-05-24 12:01:2220 針對防空導彈武器系統所面臨的各種復雜環境,提出了一種最優的正六邊形雷達組網方案,建立了目標的數學模型并探討了多傳感器自適應數據融合算法,給出了計算流程圖,得到了目標
2009-07-01 10:59:2918 針對區域分割包分類算法存在的規則分布差異較大的缺陷,該文提出一種基于啟發式分割點計算的區域分割包分類算法。首先依據規則集的分布規律進行分割點計算,然后再進行結
2009-11-13 14:53:414 本文通過對常用動態聚類方法的分析,提出了基于“約簡-優化”原理的兩階段動態聚類算法的框架,此方法克服了動態聚類搜索空間過大的問題,提高了聚類的精度和效率。
2010-01-09 11:31:1412 該文利用2 維圓形散射點模型,研究了窄帶頻率和空間分集MIMO 雷達接收通道中的目標回波的統計特性,結果表明目標回波信號本身服從高斯分布,目標回波信號之間的相關系數是等
2010-02-09 14:00:5118 基于非下采樣Contourlet變換的運動點目標背景抑制算法??
摘 要:為了解決機載紅外預警探測系統檢測地面運動點目標時的結構化背景抑制,提出了一種基于非下
2010-05-12 09:10:1616 、校正和逆向工程等領域。GTS激光跟蹤儀系統由計算機、跟蹤測量站和目標鏡組成,通過球坐標測量系統獲取空間幾何元素的測點信息,并結合三維數據分析軟件進行尺寸、公差及形貌
2025-02-06 15:37:44
紅外背景抑制與小目標分割檢測
紅外尋的導引頭小目標圖像的分割與檢測是地空導彈和艦空導彈的關鍵技術.本文研究用六種高通濾波器抑制大面積
2009-10-21 18:43:30 1552
1552 
摘要:在總結以往紅外項目實現的基礎上,著重學習研究了小波變換點目標檢測技術,并就其工程實現進行了論證,嘗試將模極大值小波算法應用到紅外點目標檢測項目中. 關鍵詞:模極大;小波變換;點目標;多分辨率分析
2011-02-28 15:43:3187 針對實際 圖像成像 過程中,由于圖像傳感器件的特性和光學衍射效應造成的目標輪廓模糊,形成了斜坡邊緣。分析了模糊輪廓的邊緣特性,研究了不同算子對階躍邊緣和斜坡邊緣的影
2011-07-21 10:43:2121 基于雷達目標一維距離像非衰減指數和模型,文中將遺傳算法和Relax算法相結合求取目標散射中心參數,充分發揮兩種算法的優勢,通過仿真分析證明了文中方法的有效性。
2012-02-13 15:20:1732 在逆向工程的數據處理中點云采樣是一項關鍵技術,它可以實現點云精簡,從而提高后續的建模效率。文中介紹了基于曲率的點云采樣算法,并進行了相關的實驗,對其有效性進行了驗
2012-07-06 16:59:4236 圖像分割在圖像處理過渡到圖像分析這個過程中起著非常重要的作用,它是圖像工程的核心,圖像分割的研究具有重要的理論和應用價值。介紹了圖像分割的基本理論和常用方法,借助Matlab平臺對閾值的分割、區域
2016-01-04 15:10:490 架空導線動態載流量的分析及改進算法_李天助
2017-01-05 15:33:030 網絡雷達對Swerling_目標檢測性能分析_劉月平
2017-01-07 16:06:320 目標特性對MIMO雷達檢測性能影響研究_姜秋喜
2017-01-07 16:06:320 一種大場景有序點云的快速_準確分割方法
2017-01-07 20:32:203 基于演化硬件的多目標進化算法的研究
2017-01-08 14:47:530 云環境下基于動態蟻群遺傳算法的調度方法研究_尚志會
2017-01-30 23:17:310 車牌字符分割的算法研究與實現_李志敏
2017-03-19 11:28:164 針對傳統閾值分割算法的一些缺點,通過將數字形態學與閾值分割算法相互結合提出了一種改進的閾值分割算法來進行脊椎圖像分割,并將分割結果與傳統圖像分割方法得到的結果進行分析對比。結果顯示本論文改進的閾值
2017-11-03 09:47:093 針對基于模糊c均值聚類( FCM)的圖像分割算法僅利用像素的灰度信息、噪聲抑制不理想、算法魯棒性不高的問題,提出了一種基于像素鄰域信息約束的FCM圖像分割算法。該算法在模糊目標函數中引入鄰域信息約束
2017-11-06 16:27:328 圖像分割技術研究,指依據圖像的一些特性(如灰度強度、顏色、紋理等)將網像中的各個像素歸類成互相都不相交的、具有某種相似性的均勻子區域的過程,是圖像處理領域中的一項重要內容。本文根據分割方法的不同特點
2017-11-07 14:05:415 針對復雜運動背景中慢速小目標檢測誤檢率高,實時性差等問題,提出了基于自適應閡值分割的慢速小目標檢測算法。首先計算連續兩幀圖像特征點的金字塔光流場,對光流場進行濾波,獲取匹配特征點集合。然后對圖像運動
2017-11-09 15:17:321 提出了一種目標飛機分割提取方法,該方法采用改進的使用金字塔式分割策略的以彩色高斯混合模型CMM(Gaussian Mixture Model)和迭代能量最小化為基礎的CJrabCut算法,達到將目標
2017-11-10 15:46:297 -濾波算法是一種高效濾波算法,常用于對勻速直線運動的跟蹤。為了解決船用ARPA雷達追蹤定位實時性和準確性的矛盾,提出使用-濾波算法對目標航跡進行濾波。在確保精度要求的同時,能夠快速定位目標,并計算
2017-11-14 11:43:343 基于對日益復雜的戰場電磁環境的適應性以及提高目標探測跟蹤能力的目的,本文分析了彈載雷達紅外復合系統的技術優勢,著重研究了作為雷達紅外復合系統技術關鍵的信息融合處理算法,采用數據關聯融合檢測和多傳感器
2017-11-15 14:46:143 視頻圖像中運動目標檢測是機器視覺領域的重要研究內容,旨在將序列圖像中的背景和前景進行有效分離。在研究幾種典型運動目標檢測算法的基礎上,提出了一種基于低秩表示動態更新投影的在線運動目標檢測算法。采用低
2017-11-24 15:14:490 圖像分割在許多圖像處理和機器視覺問題中是一個非常重要的過程,是將一幅圖分割成幾個顯著的區域,然而不能將其中最顯著的目標直接分割出來,需要進一步處理。為此本文采用顯著性檢測的算法實現了對目標的分割
2017-12-06 14:27:170 目標分割方法是工業自動化、在線產品檢驗、生產過程控制等領域的關鍵技術之一。基于特征匹配策略,研究了如何增強紋理特征的區分能力以及如何快速分割特定的目標。在紋理特征提取方面,首先通過形態學處理獲取圖像
2017-12-07 16:48:300 針對高分辨率圖像像素分割時間復雜度高的問題,提出了超像素分割算法。采用超像素代替原始的像素作為分割的處理基元,將Hadoop分布式的特點與超像素的分塊相結合。在分片過程中提出了基于多任務的靜態與動態
2017-12-09 11:37:310 針對傳統點云簡化算法效率低且處理點數少的缺陷,結合快速成型領域的切片原理顧及特征計算復雜度低的特點,設計并實現了適合千萬級海量激光雷達( LiDAR)點云的并行切片簡化算法。該算法根據切片原理對點云
2017-12-14 14:08:171 點互信息(PMI)邊界檢測算法能準確檢測圖像中的邊界,但算法效率受制于采樣點的提取。針對采樣過程中存在隨機性和信息冗余的問題,提出一種利用超像素分割提供的中層結構信息來指導點對選取的方法。首先使用超
2017-12-14 17:11:340 圖像分割就是把圖像分成若干個特定的、具有獨特性質的區域并提出感興趣目標的技術和過程。它是由圖像處理到圖像分析的關鍵步驟。現有的圖像分割方法主要分以下幾類:基于閾值的分割方法、基于區域的分割方法、基于邊緣的分割方法以及基于特定理論的分割方法等。
2017-12-18 18:19:339647 
閥值分割法是一種傳統的圖像分割方法,因其實現簡單、計算量小、性能較穩定而成為圖像分割中最基本和應用最廣泛的分割技術。閥值分割法的基本原理是通過設定不同的特征閥值,把圖像像素點分為具有不同灰度級
2017-12-19 09:13:1331785 
社團的數目和時間平滑性的平衡因子一直是基于進化聚類的動態網絡社團發現算法的最大的問題.提出一種基于標簽的多目標優化的動態網絡社團發現算法(LDMGA).借鑒多目標遺傳算法思想,將進化聚類思想轉換
2017-12-27 13:38:300 針對三維點云數據模型在去噪光順中存在不同尺度噪聲的問題,提出一種基于噪聲分類的雙邊濾波點云去噪算法。該算法首先將噪聲細分為大尺度和小尺度噪聲,并使用統計濾波結合半徑濾波對大尺度噪聲進行去除;然后
2018-01-05 10:51:022 本文將彩色分割立體匹配和簡化點云技術用于三維目標的快速重建。對于采集的左右兩幅三維目標圖像,首先采用均值漂移算法進行彩色圖像分割,然后按區域匹配算法進行快速立體匹配,獲得初始視差,再應用置信傳播法
2018-01-08 11:36:200 針對彩色圖像分割算法中小目標區域容易錯分割以及計算復雜度高的問題,提出一種基于HSI空間的結合粗糙集理論與分層思想的彩色圖像分割方法。首先,由于彩色圖像HSI空間的奇異點對應于RGB空間的灰色像素點
2018-01-08 14:12:230 解析計算法進行評估,存在計算量大、適應性差等問題。本文基于跟蹤系統為黑箱的事實,實際結合現代雷達工作模式多變的特點,提出了一種新的基于點跡與航跡時間關聯的雷達目標跟蹤能力評估模型,通過飛行檢驗驗證了該方法的有效性和評判
2018-01-10 15:48:180 傳統的雙雷達地面目標定位算法因測量數據本身固有的誤差和量測噪聲,使得基于非線性估計定位算法的定位精度不高。本文研究了一種新的雙雷達地面目標定位算法,該算法將已知雷達探測數據以幾何方式加以表示,通過
2018-03-13 14:09:443 合成孔徑雷達圖像海陸分割在海面目標檢測、海岸線提取等海洋應用方面具有重要的意義。針對合成孔徑雷達圖像的特點,本文了提出粗閾值與精確閾值相結合的海陸分割算法,并提供了一套完整的海陸分割方案。首先利用
2018-03-19 10:50:326 針對視頻安防監控系統中出現的監視區域有限、目標定位困難等問題,利用雷達監測范圍廣、不受光學條件影響的特性,建立了雷達引導的視頻聯動監控模型,并在此基礎上提出了目標定位算法和多目標選擇算法。首先,根據
2018-12-20 11:20:2921 圖像分割主要是指將圖像分成各具特性的區域并提取出感興趣目標的技術。圖像分割是數字圖像分析中的重要環節,在整個研究中起著承前啟后的作用,它既是對所有圖像預處理效果的一個檢驗,也是后續進行圖像分析與解譯
2018-12-20 15:21:586 傳統ICP算法精度受點云初始位姿影響較大,收斂速度慢,不能滿足精細化點云建模的要求。基于此問題,通過基于快速點特征直方圖的采樣一致性配準方法進行粗配準。首先將兩幀待配準點云進行體素濾波,其次進行表面
2019-03-01 09:34:0714 與二維圖像中會相互遮擋的物體不同,三維點云中的物體都是天然分離的,使得三維目標內部各個部分的相對位置可以精確獲取,這些方法將有效提高目標檢測方法的性能。基于這樣的觀察結果,研究人員提出了一個部分感知和聚合的網絡結構來進行三維點云目標檢測。
2019-08-02 14:18:474168 
ICP(Iterative Closest Point迭代最近點)算法是一種點集對點集配準方法。如下圖所示,PR(紅色點云)和RB(藍色點云)是兩個點集,該算法就是計算怎么把PB平移旋轉,使PB和PR盡量重疊。
2020-09-24 12:43:504378 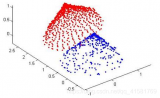
方式,分別運用Sobel,Log和Canny邊緣檢測算法與直線擬合法相結合,將圖像的目標和背景區域限制在一對平行于對角線的界線內,使用噪聲點的鄰域均值代替其灰度值,利用2維Otsu斜分法將目標從背景中分割出
2020-10-13 16:51:293 針對帶有權重目標和返回時間約束的掃描覆蓋問題,提岀一種基于目標分層和路徑分割的區域覆蓋算法TLPS。通過分析所有目標的位置和權重信息,將目標抽象成一系列的點目標并計算基站位置,分層提取不同權重的節點
2021-03-17 11:27:2716 近年來,深度傳感器和三維激光掃描儀的普及推動了三維點云處理方法的快速發展。點云語義分割作為理解三維場景的關鍵步驟,受到了研究者的廣泛關注。隨著深度學習的迅速發展并廣泛應用到三維語義分割領域,點云語義
2021-04-01 14:48:4616 針對復雜場景下視頻日標分割質量不佳和時間效率低下的問題,提岀了一種動態外觀模型和高階能量的雙邊視頻目標分割方法,將視頻目標分割轉換為基于雙邊網格單元的馬爾可夫隨機場(MRF)模型求解問題。首先
2021-04-07 15:44:428 三維網格分割是計算機圖形學的一個重要的研究方向,近年來不斷涌現出各種新的分割技術。主要關注基于聚類分析的三維網格分割技術,介紹了三維網格分割的2種常見類型,并對分割技術所轉化的數學問題進行闡述總結
2021-04-29 14:15:053 文中提出了一種基于激光雷達點云的三維目標檢測算法 Voxeircnn( Voxelization Region-based Convolutional Neural Networks),該算法
2021-05-08 16:35:2445 點云分割是點云處理的一個關鍵環節,其分割質量決定了目標測量、位姿估計等任務的精確與否。
2021-06-26 10:57:382253 
基于并行Boosting算法的雷達目標跟蹤檢測系統
2021-06-30 14:25:5432 改進自適應GACV的水下圖像分割算法研究(通信電源技術20年第13期)-基于改進自適應GACV的水下圖像分割算法研究摘要論文針對水下彩色圖像對比度低、模糊、偏色等退化問題,研究了幾何活動輪廓模型
2021-09-22 15:32:1011 基于三維激光點云的目標識別與跟蹤研究 來源:《汽車工程》 ,作者徐國艷等 [摘要] 針對無人車環境感知中的障礙物檢測問題,設計了一套基于車載激光雷達的目標識別與跟蹤方法。為降低計算量,提高處理速度
2022-01-17 11:22:441112 這篇文章是激光雷達點云數據分割算法的嵌入式平臺上的部署實現。主要的創新點有兩點:一是利用多路分支采用不同分辨率輸入后再用不同的...
2022-01-26 18:15:333 場景分割的目標是判斷場景圖像中每個像素的類別.場景分割是計算機視覺領域重要的基本問題之一,對場景圖像的分析和理解具有重要意義,同時在自動駕駛、視頻監控、增強現實等諸多領域具有廣泛的應用價值.近年來
2022-02-12 11:28:52917 基于三維激光點云的目標識別與跟蹤研究 來源:《汽車工程》?,作者徐國艷等 [摘要]?針對無人車環境感知中的障礙物檢測問題,設計了一套基于車載激光雷達的目標識別與跟蹤方法。為降低計算量,提高處理速度
2022-02-15 13:36:383733 
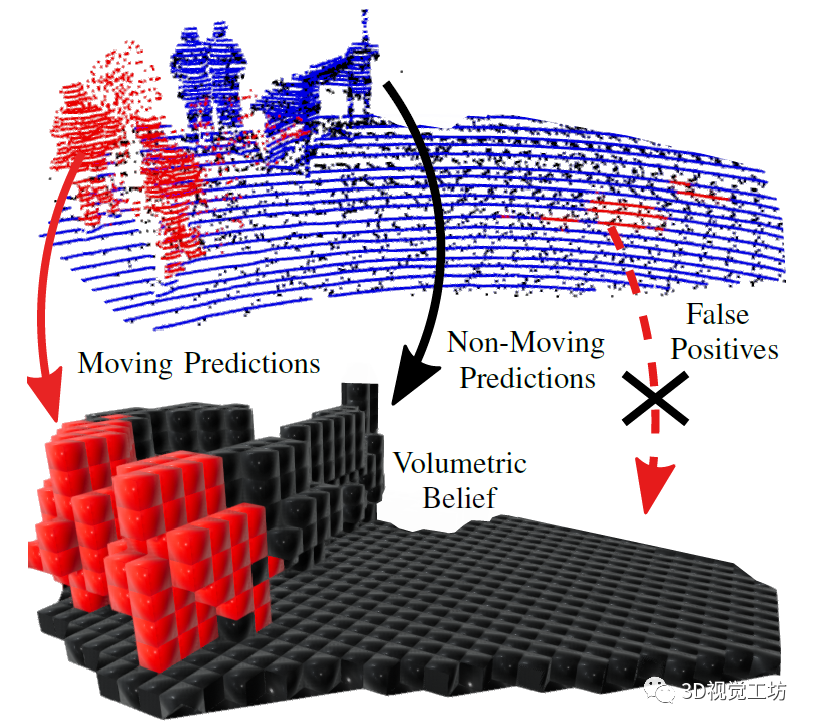
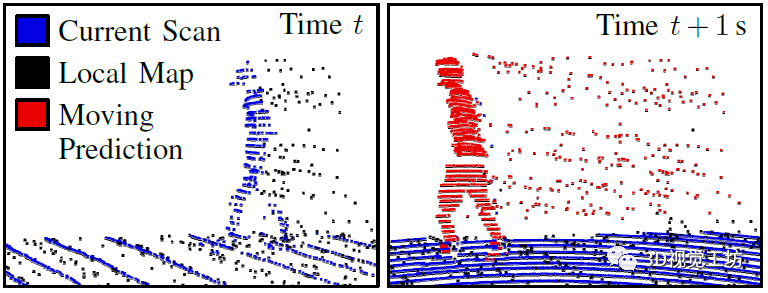
本文旨在尋求一種無監督的3D物體分割方法。我們發現,運動信息有望幫助我們實現這一目標。如下圖1所示,在左圖中的藍色/橙色圓圈內,一輛汽車上的所有點一起向前運動,而場景中其他的點則保持靜止。那么理論上,我們可以基于每個點的運動,將場景中屬于汽車的點和其他點分割開,實現右圖中的效果。
2022-11-09 15:15:203393 容易地找到此類測量值,如逐幀點云,這些數據通常以10Hz的頻率進行采樣,并已用于3D對象檢測、語義分割和建圖。
2022-11-25 09:57:543158 自動駕駛領域的下游任務,我認為主要包括目標檢測、語義分割、實例分割和全景分割。其中目標檢測是指在區域中提取目標的候選框并分類,語義分割是對區域中不同類別的物體進行區域性劃分,實例分割是將每個類別進一步細化為單獨的實例,全景分割則要求對區域中的每一個像素/點云都進行分類。
2022-12-14 14:25:383727 雷達通過天線發射電磁波照射目標,并接收目標反射回的微弱信號,經過信號處理檢測出關于目標或環境的信息,例如距離、速度、方位、散射特性等。從雷達系統的基本處理過程可以看出,雷達主要包括發射機、天線、接收機、信號處理器、顯示器等部分。今天主要給大家詳細分析目標的雷達散射截面積。
2022-12-19 09:49:463048 在與激光雷達公司和下游主機廠或者解決方案商的專家交流的過程中,筆者發現,當前激光點云的處理過程中,感知算法人員會遇到很多問題。
2023-03-14 17:50:404315 語義分割是區分同類物體的分割任務,實例分割是區分不同實例的分割任務,而全景分割則同時達到這兩個目標。全景分割既可以區分彼此相關的物體,也可以區分它們在圖像中的位置,這使其非常適合對圖像中所有類別的目標進行分割。
2023-05-17 14:44:242587 
點云分割技術是指將三維空間中的點云數據分割成若干個具有相似屬性(如形狀、顏色、紋理等)的區域,從而實現點云數據的理解和分析。點云分割技術廣泛應用于自動駕駛、無人機、虛擬現實等領域,是三維視覺領域
2023-05-24 17:26:231854 在自動駕駛環境感知系統中,如何獲取高精度實時路況數據,是決定自動駕駛系統行車安全的關鍵。
目前主流的兩種感知技術路徑“純視覺”與“高精地圖+激光雷達”中,由于激光雷達采集的3D點云路況數據更為密集
2023-06-06 09:48:433 確定分割閾值。圖像分割是圖像處理技術的研究對象之一,它對于圖像特征提取、圖像識別等圖像處理技術等有著重要意義。主要研究基于遺傳算法的圖像分割效果,采用Matlab 軟件進行仿真實驗,對不同圖像分割算法的效果進行比較
2023-07-18 16:04:141 摘 要:點云分割是點云數據理解中的一個關鍵技術,但傳統算法無法進行實時語義分割。近年來深度學習被應用在點云分割上并取得了重要進展。綜述了近四年來基于深度學習的點云分割的最新工作,按基本思想分為
2023-07-20 15:23:593 激光雷達作為自動駕駛最常用的傳感器,經常需要使用激光雷達來做建圖、定位和感知等任務。 而這時候使用降低點云規模的預處理方法,可以能夠去除無關區域的點以及降低點云規模。并能夠給后續的PCL點云分割帶來
2023-11-27 18:11:571759 的區別。 定義 圖像分割是將圖像劃分為若干個區域或對象的過程,這些區域或對象具有相似的屬性,如顏色、紋理或形狀。圖像分割的目的是將圖像中的不同對象或區域分離出來,以便進行進一步的分析和處理。 目標檢測則是在圖像中
2024-07-17 09:53:203062 )、環境監測、城市規劃等領域。激光雷達點云數據是激光雷達系統收集到的一系列三維空間坐標點,包含了豐富的空間信息。本文將介紹激光雷達點云數據包含的信息。 空間坐標信息 激光雷達點云數據最基本的信息是空間坐標信息,即每個點的X、Y、
2024-08-29 17:18:562575 點云是世界的一種非結構化三維數據表示,通常由激光雷達傳感器、立體相機或深度傳感器采集。它由一系列單個點組成,每個點由 x、y 和 z 坐標定義。
2024-10-29 09:21:201049 一、前言 1.1 開發需求 這篇文章講解:?采用華為云最新推出的 Flexus 云服務器 X 實例部署 YOLOv3 算法,完成圖像分析、目標檢測。 隨著計算機視覺技術的飛速發展,深度學習模型如
2025-01-02 12:00:251111 
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論