完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > foc
FOC。把先進(jìn)的科技和設(shè)計(jì)完美結(jié)合起來(lái),作為一個(gè)設(shè)計(jì)領(lǐng)域的先驅(qū),專業(yè)為快速制造而設(shè)計(jì)產(chǎn)品。代表產(chǎn)品有FOC Palm-hug 吸頂燈FOC-Field Oriented Control,磁場(chǎng)定向控制。
文章:234個(gè) 瀏覽:46206次 帖子:533個(gè)
集成式電機(jī)驅(qū)動(dòng)器和控制器芯片方案
無(wú)刷直流 (BLDC) 電機(jī)在各種各樣的應(yīng)用中廣受青睞,如計(jì)算機(jī)冷卻風(fēng)扇、磁盤(pán)驅(qū)動(dòng)器、無(wú)線電動(dòng)工具、電動(dòng)自行車(chē)以及電唱機(jī)轉(zhuǎn)盤(pán)。 隨著價(jià)格持續(xù)下降,電機(jī)將...
2018-07-24 標(biāo)簽:傳感器無(wú)刷直流電機(jī)FOC 1.4萬(wàn) 0
許多MCU 芯片只支持整數(shù)運(yùn)算,如果要在這些芯片上進(jìn)行小數(shù)運(yùn)算,定點(diǎn)運(yùn)算應(yīng)該是最佳選擇了;此外即使芯片支持浮點(diǎn)數(shù),定點(diǎn)小數(shù)運(yùn)算也是最佳的速度選擇。
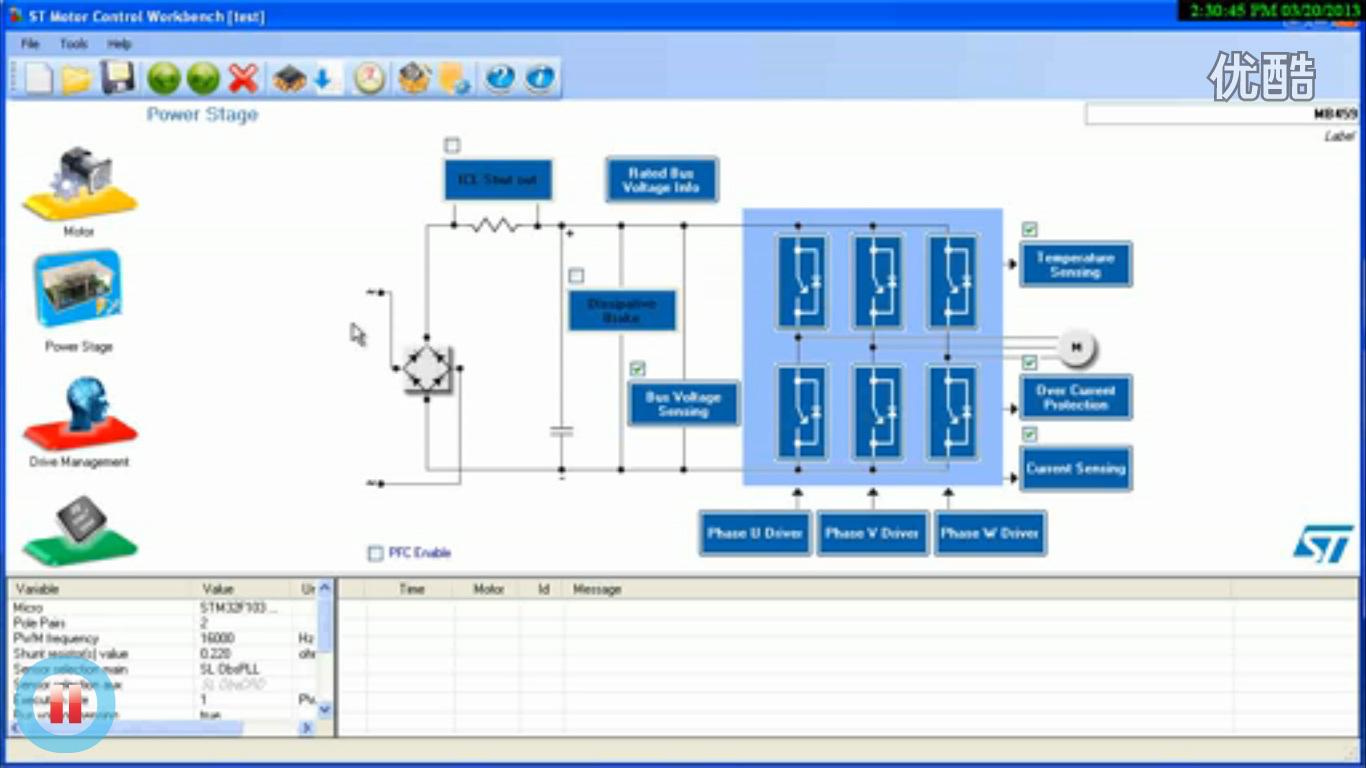
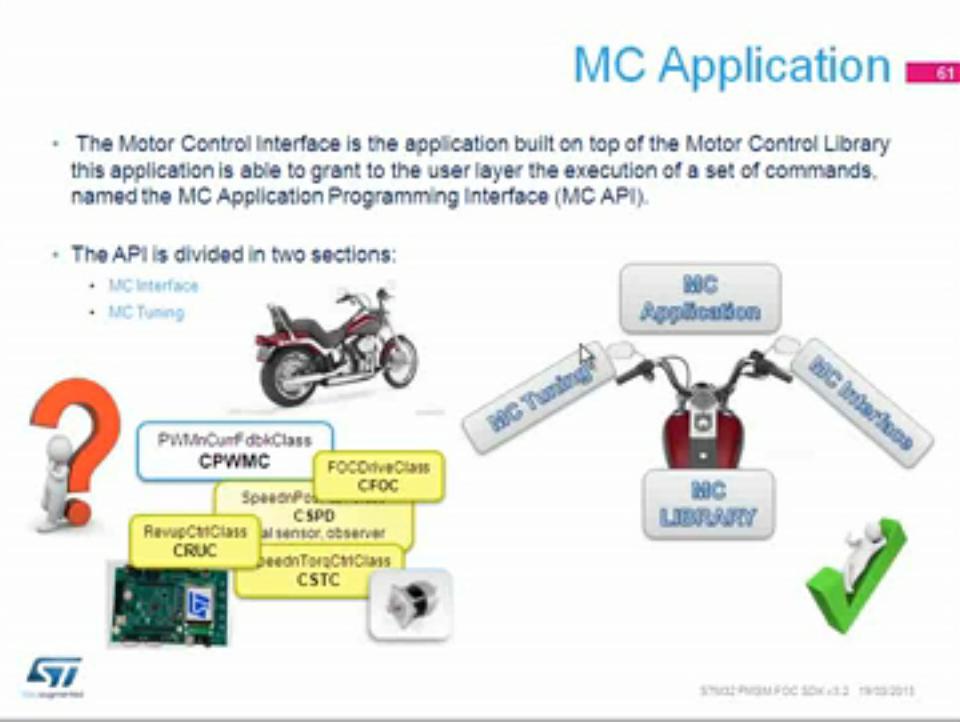
STM32無(wú)刷電機(jī)開(kāi)發(fā)套件演示與PMSM FOC軟件培訓(xùn)
STM32無(wú)刷電機(jī)開(kāi)發(fā)套件演示說(shuō)明,基于STM32的PMSM FOC軟件培訓(xùn)
2018-07-02 標(biāo)簽:stm32無(wú)刷電機(jī)FOC 1.2萬(wàn) 0
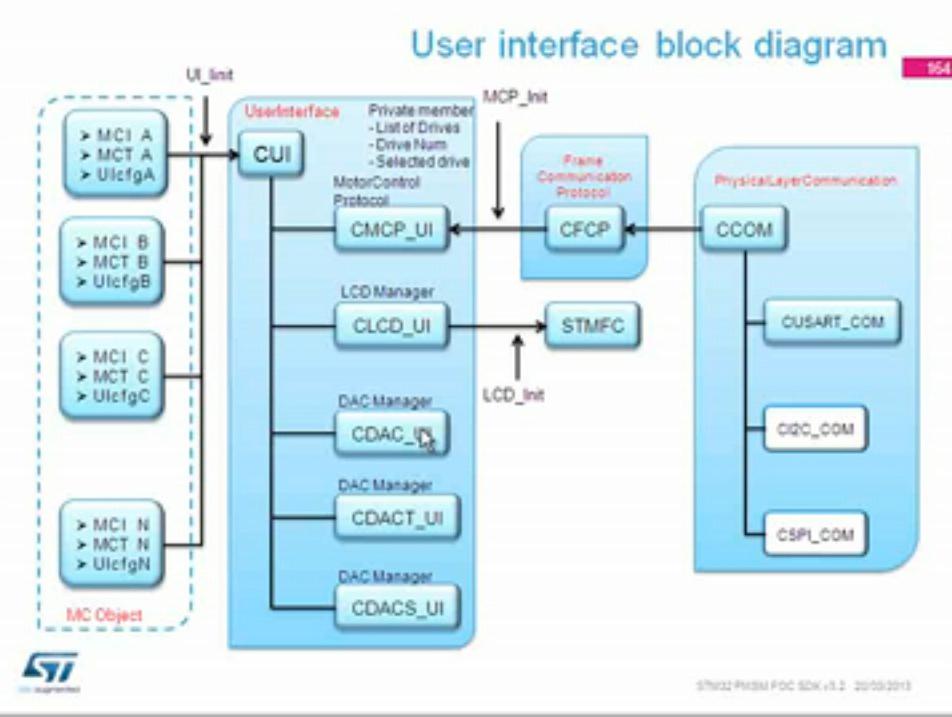
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座六
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座八
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座七
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座三
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座五
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座四
關(guān)于STM32 PMSM FOC SDK V3.2 講座(11)
STM32 PMSM FOC SDK V3.2 培訓(xùn)講座十一
電機(jī)控制電子實(shí)驗(yàn)室第5章:FOC /扭矩控制
Motor Control Analog eLab, 10-part technical video series from Texas Instrum...
TI永磁同步BLDC電機(jī)控制FOC控制方案演示

變頻洗衣機(jī)中的電機(jī)已經(jīng)越來(lái)越多的采用永磁同步電機(jī)。利用FOC變頻控制算法,可以使洗衣機(jī)設(shè)計(jì)成更低能耗和更低噪音;而最新的無(wú)傳感器技術(shù),再加上使用處理器片...
TMC4671基于硬件FOC伺服電機(jī)控制芯片適應(yīng)BLDC/PMSM等
全球領(lǐng)先的嵌入式運(yùn)動(dòng)控制公司德國(guó)TRINAMIC MOTION CONTROL 將于近期推出其最新的伺服控制芯片TMC4671。
無(wú)刷直流電機(jī)基于ADRC的無(wú)感FOC速度控制方案
世事往往真假錯(cuò)亂,難以區(qū)分。ADRC算法根據(jù)自身的控制能力,只執(zhí)行合理的命令,避免執(zhí)行錯(cuò)誤的命令后,錯(cuò)上加錯(cuò)!
2018-05-15 標(biāo)簽:nxp無(wú)刷直流電機(jī)FOC 2.4萬(wàn) 0
Vive Focus VR一體機(jī)評(píng)測(cè):將支持4G移動(dòng)網(wǎng)絡(luò)?
從機(jī)身正面可以看到Vive Focus頭顯配置了兩顆追蹤感應(yīng)器,其搭配Inside-Out位置追蹤技術(shù)來(lái)實(shí)現(xiàn)6DoF大空間移動(dòng),VIVE logo位于感...
2018-04-02 標(biāo)簽:移動(dòng)網(wǎng)絡(luò)FOCVR一體機(jī) 4.7k 0
FOC算法和PFM控制馬達(dá),設(shè)計(jì)方案
標(biāo)量控制(或者常稱的電壓/頻率控制)是一種簡(jiǎn)單的控制方法,通過(guò)改變供電電源(電壓)和提供給定子的頻率來(lái)改變馬達(dá)的扭矩和轉(zhuǎn)速。這種方法相當(dāng)簡(jiǎn)單,甚至用8/...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語(yǔ)言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無(wú)刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺(jué) | 無(wú)人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國(guó)民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹(shù)莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 長(zhǎng)沙勒克斯教育咨詢有限公司
湖南省長(zhǎng)沙市開(kāi)福區(qū)月湖街道匍園路20號(hào)聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號(hào)-105-1