") STM32 PMSM FOC SDK V3.2 講座(5)
STM32 PMSM FOC SDK V3.2 講座(5)

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
STM32
+關(guān)注
關(guān)注
2309文章
11162瀏覽量
373414 -
FOC
+關(guān)注
關(guān)注
21文章
389瀏覽量
46202
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦

Xilinx官方開源FOC電機(jī)控制工程解析
/ PMSM)中的核心算法。為了幫助開發(fā)者更快落地這一領(lǐng)域,Xilinx 官方維護(hù)了一個開源庫——FOC Motor Control Library。

奇異摩爾入選2025中國科創(chuàng)好公司半導(dǎo)體榜單
Speciale版本則專注于極致推理,二者共同構(gòu)成一套應(yīng)對不同場景的“推理底座”。其中V3.2在綜合推理能力上已對齊GPT-5,而其稀疏注意力機(jī)制(DSA)等技術(shù),更讓處理長文本的成本和效率實現(xiàn)了數(shù)倍的優(yōu)化。
中科曙光AI超集群系統(tǒng)和scaleX640超節(jié)點等產(chǎn)品全面適配DeepSeek V3.2
12月1日,DeepSeek正式發(fā)布DeepSeek-V3.2和DeepSeek-V3.2-Speciale,大幅強(qiáng)化Agent能力,融入思考推理。基于中國首個AI計算開放架構(gòu),硬件層、軟件層、模型
正面對決GPT-5和Germini-3,DeepSeek-V3.2震撼發(fā)布
達(dá)到了GPT-5的水平,DeepSeek-V3.2首次將“思考模式(thinking mode)”與工具使用深度整合,成為其下一代 AI 助理(AI agent)策略的核心布局。

BLDC與PMSM電機(jī)控制算法的聯(lián)系與區(qū)別
及原因?
lBLDC + 六步換相法: 這是“經(jīng)濟(jì)適用”型組合,滿足最基本“轉(zhuǎn)起來”的需求,追求極致的成本控制。
lBLDC/PMSM + 無位置傳感器FOC: 這是“性能升級”型組合。當(dāng)對BLDC的性能
發(fā)表于 10-27 09:23
?MCF8315A 傳感器磁場定向控制(FOC)集成FET無刷直流電機(jī)驅(qū)動器技術(shù)文檔總結(jié)
該MCF8315A為驅(qū)動峰值電流高達(dá) 4A 的速度控制的 12 至 24V 無刷直流電機(jī) (BLDC) 或永磁同步電機(jī) (PMSM) 的客戶提供單芯片、無代碼無傳感器 FOC 解決方案。該
MCF8316D傳感器無感FOC集成FET BLDC驅(qū)動器總結(jié)
該MCF8316D提供單芯片、無代碼無傳感器 FOC 器件,用于驅(qū)動高達(dá) 8A 峰值電流的 12 至 24V 無刷直流電機(jī) (BLDC) 或永磁同步電機(jī) (PMSM)。該MCF8316D集成了三個1
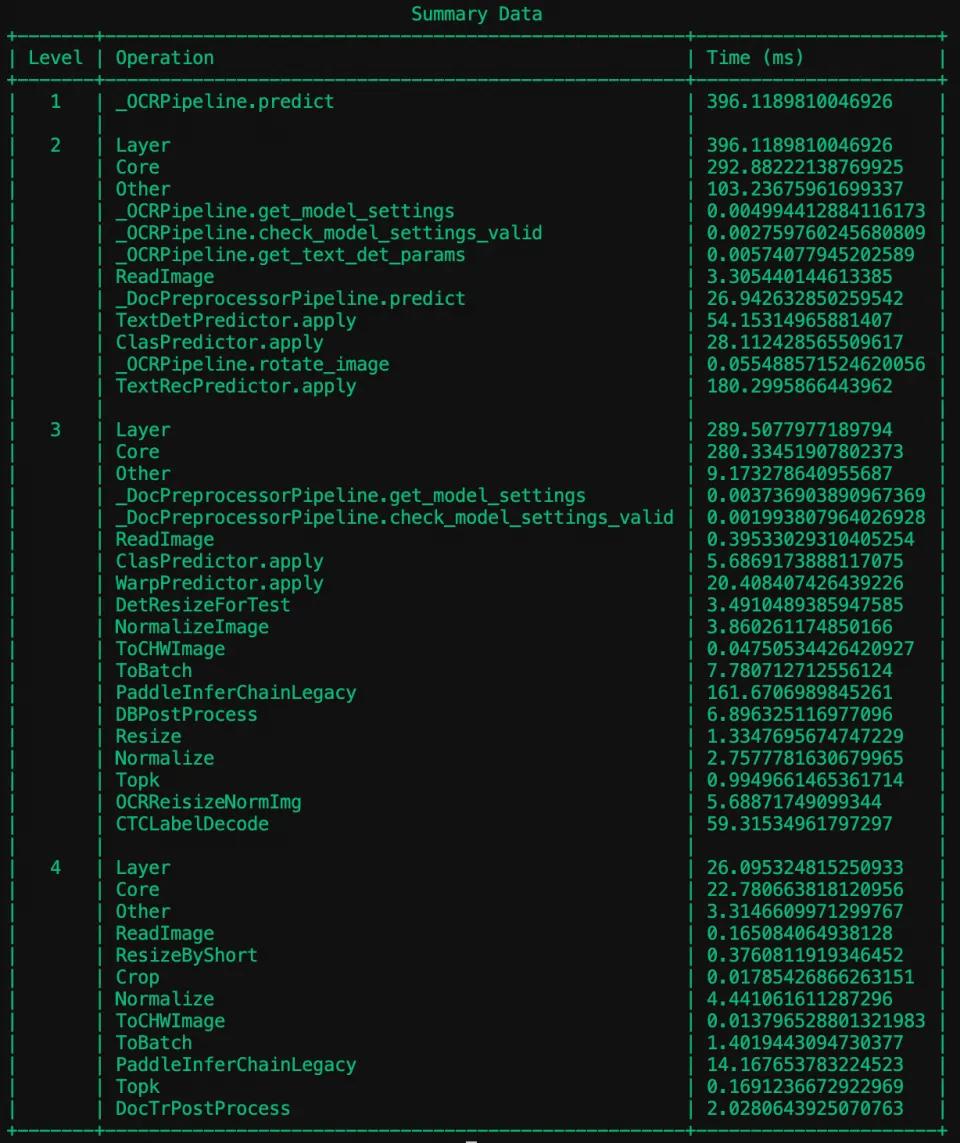
精準(zhǔn)定位性能瓶頸:深入解析 PaddleOCR v3.2 全新 Benchmark 功能
v3.2 給出了一個非常實用的解決方案——全新的 細(xì)粒度 Benchmark 功能。它不僅能測量端到端的整體速度,還能拆解到每個模塊、每個關(guān)鍵方法的耗時,幫你一眼鎖定性能瓶頸。結(jié)果支持控制臺直觀展示,也能導(dǎo)出為 CSV 方便后續(xù)可視化和分析。有了這個工具,性能
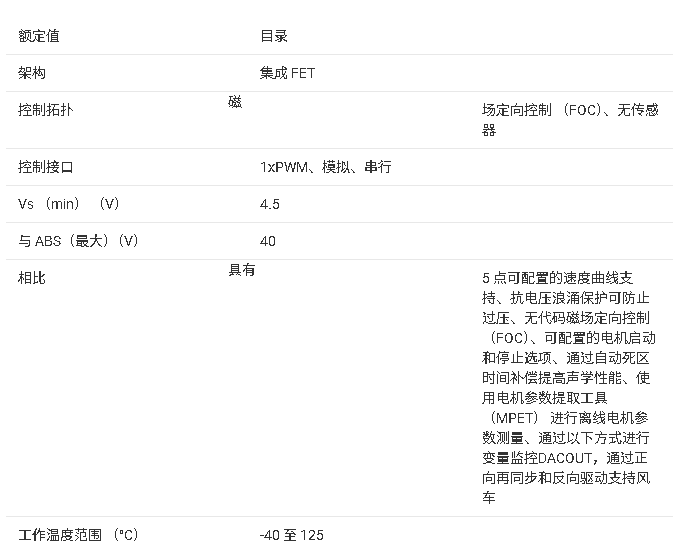
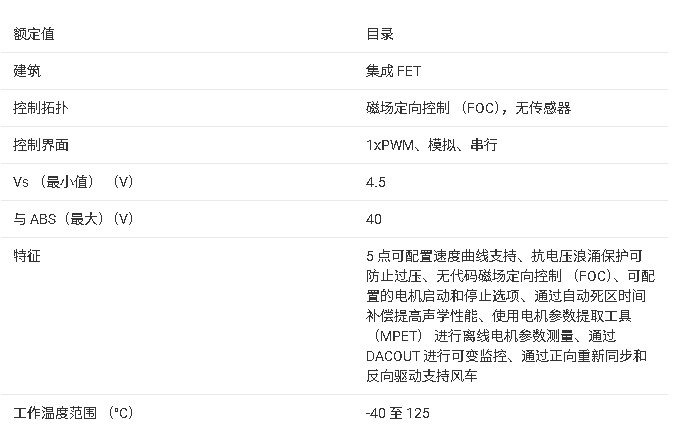
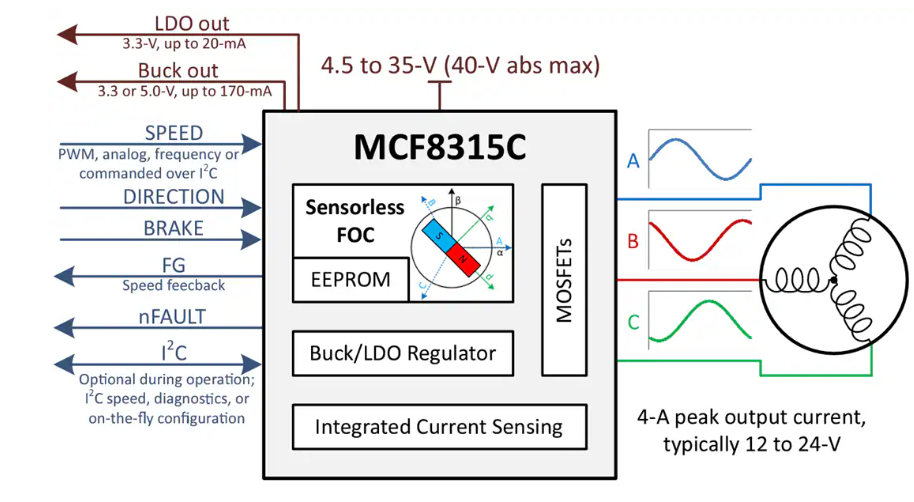
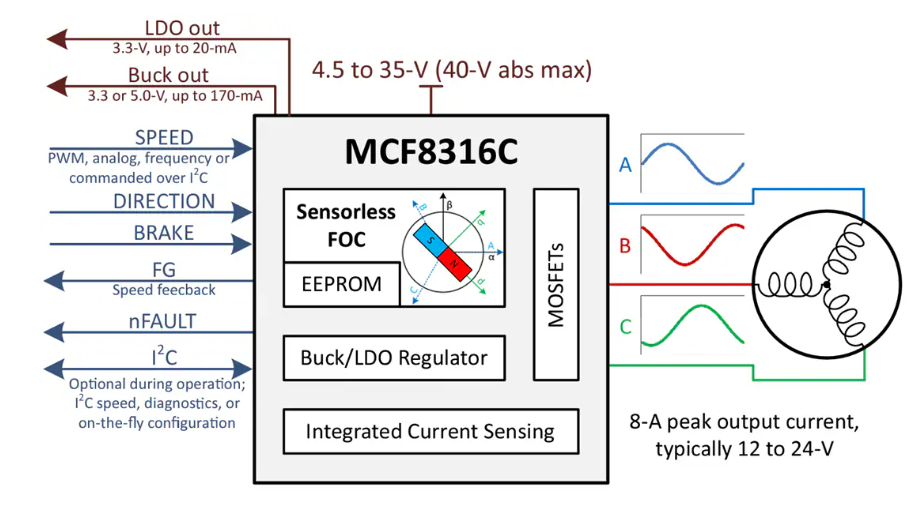
MCF8315C:一款集成無傳感器FOC算法的三相BLDC電機(jī)驅(qū)動器技術(shù)解析
Texas Instruments MCF8315C/MCF8315C-Q1 FOC三相BLDC電機(jī)驅(qū)動器為客戶提供單芯片、無代碼、無傳感器FOC解決方案,驅(qū)動速度控制的永磁同步電機(jī) (PMSM
Nordic nRF5 SDK和softdevice介紹
里?Softdevice幫助文檔在哪里?如何選擇某個SDK例子 (example) 以開始我們的BLE開發(fā)之旅?本文將對以上問題進(jìn)行解答。 Nordic目前有2套完全獨立的SDK:nRF5 S
德州儀器MCF8316C-Q1無傳感器FOC BLDC驅(qū)動器技術(shù)解析
Texas Instruments MCF8316C-Q1無傳感器磁場定向控制 (FOC) 集成式FET BLDC驅(qū)動器提供單芯片、無代碼、無傳感器FOC器件。這些設(shè)計用于驅(qū)動速度控制12V至24
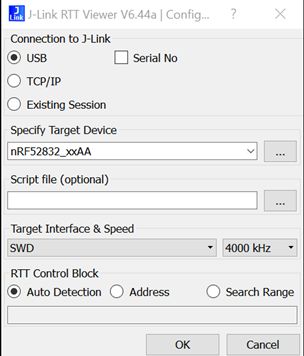
如何調(diào)試nRF5 SDK
本文將講述Nordic nRF5 SDK的主要調(diào)試手段,以幫助大家快速定位問題,并解決問題。一般來說,你可以通過打log方式,IDE的debug模式,SDK自帶的app_error_check函數(shù)
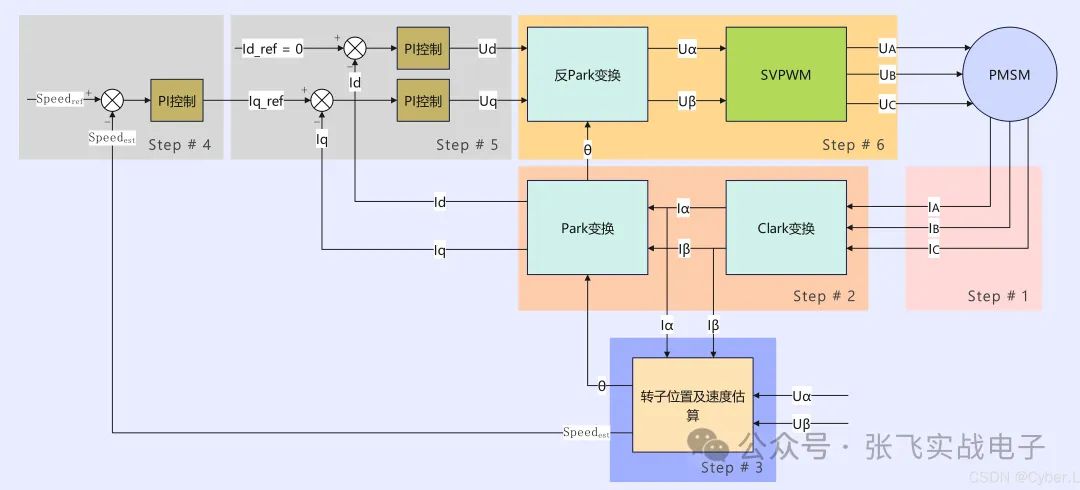
【電機(jī)控制】PMSM無感FOC控制
0.前言前段時間做了一個永磁同步電機(jī)無感控制的項目,想總結(jié)一下,做個比較基礎(chǔ)易懂的文章方便大家入門,主要介紹以下幾個方面:1.FOC控制算法、坐標(biāo)變換2.PID控制器3.SVPWM4.過調(diào)制5



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論