近年來,以卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,DNN)為代表的深度學(xué)習(xí)算法在許多計算機(jī)視覺任務(wù)上取得了巨大突破,如圖像分類、目標(biāo)檢測、畫質(zhì)增強等[1-2]。然而
2020-11-30 14:01:46 13398
13398 
本節(jié)主要將近年來基于候選區(qū)域的目標(biāo)檢測算法分為五個部分進(jìn)行綜述,首先介紹了Faster R-CNN[14]框架的發(fā)展歷程,然后綜述了對Faster R-CNN算法的四個重要組成部分(特征提取網(wǎng)絡(luò)、ROI Pooling層、RPN、NMS算法)的改進(jìn)研究.
2023-01-09 10:52:321755 車輛檢測是一種基于深度學(xué)習(xí)的對人進(jìn)行檢測定位的目標(biāo)檢測,能廣泛的用于園區(qū)管理、交通分析等多種場景,是違停識別、堵車識別、車流統(tǒng)計等多種算法的基石算法。
2025-05-08 17:34:241337 
目標(biāo)檢測算法圖解:一文看懂RCNN系列算法
2019-08-29 09:50:56
的關(guān)注。但是,由于復(fù)雜的水下環(huán)境和光照條件,這仍然是一項艱巨的任務(wù)。基于深度學(xué)習(xí)的物體檢測系統(tǒng)已在各種應(yīng)用中表現(xiàn)出較好的性能,但在處理水下目標(biāo)檢測方面仍然感到不足,主要有原因是:可用的水下目標(biāo)檢測數(shù)據(jù)集
2020-07-24 11:05:39
一種可靠的峰值和起始點檢測算法,該算法使用最初被提議用于動脈血壓(ABP)波形的描繪方法。
2019-07-30 06:05:32
YSQ(于仕琪)人臉檢測介紹:YSQ人臉檢測算法實現(xiàn)快速從視頻幀中檢測人臉并提取關(guān)鍵信息,支持多視角檢測,每個人臉提取68個關(guān)鍵點(Landmark)坐標(biāo)。算法使用標(biāo)準(zhǔn)C/C++實現(xiàn),無任何第三方庫或工具依賴。具有以下特點
2019-07-29 06:49:25
機(jī)器視覺表面檢測的準(zhǔn)確性方面來看,盡管一系列優(yōu)秀的算法不斷出現(xiàn),但在實際應(yīng)用中準(zhǔn)確率仍然與滿足實際應(yīng)用的需求尚有一定差距,如何解決準(zhǔn)確識別與模糊特征之間、實時性與準(zhǔn)確性之間的矛盾仍然是目前的難點。傳統(tǒng)
2021-05-28 11:58:52
檢測系統(tǒng)在低功耗、輕小型化等方面提出了更高的要求。因此,完成小目標(biāo)檢測任務(wù)不僅需要尋求合理的小目標(biāo)檢測算法,在實現(xiàn)時還需要考慮處理性能和體積功耗。
2019-08-09 07:07:03
、并行處理、從目標(biāo)檢測算法嵌入式平臺的實現(xiàn)的設(shè)計要求出發(fā),基于深度學(xué)習(xí)的目標(biāo)檢測算法特點,采用軟硬件協(xié)同設(shè)計思想進(jìn)行總體架構(gòu)設(shè)計,使得可編程邏輯部分可進(jìn)行參數(shù)可配置以處理不同參數(shù)和結(jié)構(gòu)的網(wǎng)絡(luò)層,具有一
2020-09-25 10:11:49
項目名稱:基于RK3399+Intel NCS2加速YOLO4目標(biāo)檢測算法加速方案試用計劃:項目名稱:基于RK3399+Intel NCS2加速YOLO4目標(biāo)檢測算法加速方案試用
2020-06-30 16:04:45
最近幾年的人臉檢測算法和一種新的快速算法,與大家探討特征、弱分類器、收斂準(zhǔn)則、樣本選擇等對人臉檢測性能的影響,并嘗試分析人臉姿態(tài)、表情、遮擋、年齡、種族等影響因素。2013年全國圖像圖形處理技術(shù)應(yīng)用大會
2013-09-26 15:13:24
目前優(yōu)化了一款高速人臉檢測算法,在 ARM設(shè)備的A73單核CPU(圖像大小:860*540最小人臉大小:60*60)速度可以高達(dá)10-15ms每幀,真正的實時人臉檢測算法,算法準(zhǔn)確率在 FDDB數(shù)據(jù)
2021-12-15 07:01:06
最近想試驗一下在單片機(jī)上能不能將車道線檢測算法跑起來,也作為一個了解單片機(jī)和用C語言手?jǐn)]圖像處理算法的學(xué)習(xí)機(jī)會。這一系列文章將從單片機(jī)、RTOS(RT-Thread)、外設(shè)(攝像頭、LCD顯示屏
2021-07-15 09:35:36
微分邊緣檢測算法主要是基于圖像強度的一階和二階導(dǎo)數(shù),而導(dǎo)數(shù)的計算對噪聲很敏感,噪聲的存在可能會使檢測到的邊緣變寬或在某些點處發(fā)生間斷,因此,需要使用濾波器來濾掉噪聲。大多數(shù)濾波器在降低噪聲的同時也
2018-09-21 11:45:44
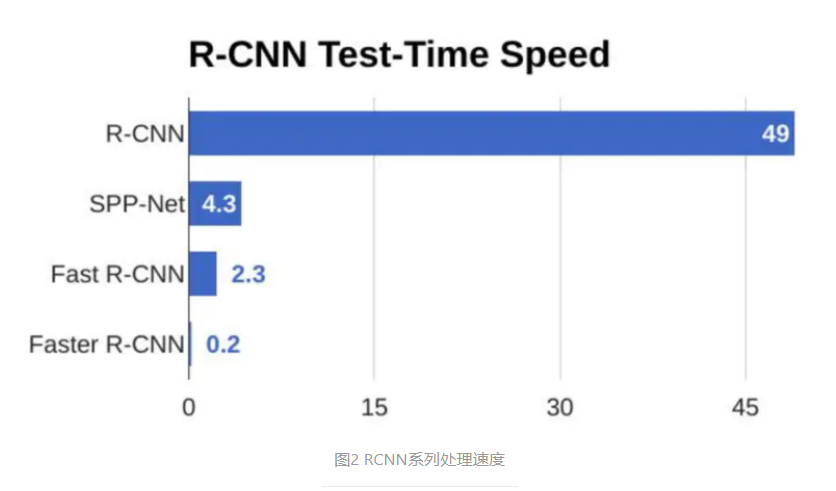
,基于 RCNN 改進(jìn)的 Fast R-CNN、Faster R-CNN 等在檢 測速度和精度上獲得進(jìn)一步提升,逐漸成為了目標(biāo)檢測的首選方法。R-CNN 系列目標(biāo)檢測算法是典型的兩階段目標(biāo)檢測算法,第一
2023-03-06 13:55:27
什么是同步檢測算法?如何去實現(xiàn)相位模糊估計的幀同步檢測算法?
2021-05-06 07:23:16
本文將回顧一系列的特征檢測算法,在這個過程中,看看一般目標(biāo)識別和具體特征識別在這些年經(jīng)歷了怎樣的發(fā)展。
2021-06-02 06:24:59
無人機(jī)設(shè)計中姿態(tài)檢測算法、姿態(tài)控制算法有什么區(qū)別 ?推薦課程:張飛四旋翼飛行器視頻套件,76小時吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2018-07-14 12:12:37
兩通道DPCA動目標(biāo)檢測原理是什么?基于機(jī)載單通道SAR數(shù)據(jù)的地面運動目標(biāo)檢測算法
2021-06-03 06:04:06
求Matlab圖像自編邊緣檢測算法,多謝了
2013-12-03 20:58:39
邊緣檢測是什么?邊緣檢測算子有哪些?邊緣檢測算法分為哪幾種?它們有何不同?
2021-05-31 06:57:51
的檢測 。4 . 3 二維 多 策略恒虛警檢測算法設(shè)計4 . 3 . 1 CFAR 檢測畝 設(shè)計考慮到高鐵場景下線性調(diào)頻連續(xù)波雷迭回 波信 號可能 包含大量干擾因 素 , 如地面、 灌木叢 、 鐵軌
2018-03-29 10:53:32
目 標(biāo) 的檢測 。 4 . 3 二維 多 策略恒虛警檢測算法設(shè)計4 . 3 . 1 CFAR 檢測畝 設(shè)計考慮到高鐵場景下線性調(diào)頻連續(xù)波雷迭回 波信 號可能 包含大量干擾因 素 , 如地面、 灌木叢
2018-02-28 09:19:59
摘要:討論了序列圖像的運動目標(biāo)檢測算法,在傳統(tǒng)的光流場計算方法的基礎(chǔ)上,提出了基于幀間差閾值法的快速光流算法。整個算法簡單、有效,保證了序列圖像中運動目標(biāo)跟
2009-01-09 12:06:23 29
29 針對復(fù)雜環(huán)境下運動目標(biāo)檢測提出一種基于像素分類的運動目標(biāo)檢測算法。該算法通過亮度歸一化對圖像序列進(jìn)行預(yù)處理,用以降低光照變化造成的誤檢,根據(jù)場景中不同像素點的
2009-04-10 08:51:014 使用形態(tài)學(xué)的思想進(jìn)行圖像的邊緣檢測,提出了在一次形態(tài)處理中使用雙結(jié)構(gòu)元的一系列一般性形態(tài)邊緣檢測算子和抗噪型形態(tài)邊緣檢測算子的算法,并給出算子的性質(zhì)。新算子
2009-04-19 19:26:3332 本文提出了一種基于數(shù)字圖像處理技術(shù)的表面裂紋檢測算法。運用這種算法能精確的檢測裂紋的位置、長度等特征。將這種裂紋檢測算法運用到裂紋自動檢測系統(tǒng)以及裂紋擴(kuò)展行為
2009-08-21 10:37:0636 一種微分極值的邊緣檢測算法
本文通過對邊緣點的定義,提出了一種微分極值的邊緣檢測算法。與經(jīng)典微分算法相比,該算法直接在邊緣檢測窗口內(nèi)提取邊界像
2010-02-22 15:03:568 利用時差定位系統(tǒng)的定位誤差特性,基于蟻群優(yōu)化算法,提出了一種蟻群聚類檢測算法,在不需要先驗信息的情況下,實現(xiàn)了對靜止目標(biāo)的檢測。實際數(shù)據(jù)測試結(jié)果表明蟻群聚類檢
2010-03-06 11:32:426 邊緣檢測是醫(yī)學(xué)圖像處理中非常重要的一個環(huán)節(jié),通過對幾種經(jīng)典邊緣檢測算法的分析,提出了一種基于Canny算子的改進(jìn)算法。該算法以圖像增強法代替原算法中的高斯濾波,以去除
2010-07-05 16:50:5615 由于實際場景的多樣性,目前常用的運動目標(biāo)檢測算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結(jié)合的方法,實現(xiàn)快速精確地檢測和提取運動目標(biāo)。實
2010-07-27 16:42:0713 滑坡現(xiàn)象。泥石流山體滑坡監(jiān)控AI視覺識別檢測算法一旦系統(tǒng)識別到災(zāi)害事件的發(fā)生,系統(tǒng)會立即進(jìn)行圖像抓拍,并將相關(guān)信息同步通知后臺值班人員。泥石流山體滑坡監(jiān)控AI視覺識
2024-08-30 19:11:02
裸土覆蓋檢測算法是一種先進(jìn)的圖像識別技術(shù),裸土覆蓋檢測算法通過安裝在現(xiàn)場的監(jiān)控攝像頭自動捕捉視頻或圖像,進(jìn)而識別出裸露土壤區(qū)域。該算法的核心在于利用CNN的強大特征提取能力,對圖像中的裸露土壤進(jìn)行
2024-11-01 21:24:34
本內(nèi)容提供了基于碼本模型的運動目標(biāo)檢測算法
2011-05-19 10:54:0132 為了設(shè)計一種實時高效、穩(wěn)定可靠的圖像目標(biāo)跟蹤系統(tǒng)平臺,避免因圖像邊緣提取效果差而引起跟蹤失敗,采用自適應(yīng)Canny邊緣檢測算法。該自適應(yīng)算法能夠很好的確定平滑參數(shù)以及高
2012-03-05 16:14:1338 針對幀差分法易產(chǎn)生空洞以及背景減法不能檢測出與背景灰度接近的目標(biāo)的問題,提出了一種將背景減和幀差法相結(jié)合的運動目標(biāo)檢測算法。首先利用連續(xù)兩幀圖像進(jìn)行背景減法得到兩
2013-03-01 15:10:3548 提出了一種基于Surendra改進(jìn)的運動目標(biāo)檢測算法,通過對背景更新系數(shù)的改進(jìn),獲取穩(wěn)定準(zhǔn)確的背景,再將背景幀與含運動區(qū)域的圖像幀用差分運算獲得運動目標(biāo)圖像。實驗結(jié)果表明,
2013-08-07 19:02:3531 一種基于深度神經(jīng)網(wǎng)絡(luò)的基音檢測算法_曹猛
2017-01-07 19:08:430 改進(jìn)的ViBe運動目標(biāo)檢測算法_劉春
2017-03-19 11:41:390 提出一種基于背景碼本模型的視頻圖像中運動目標(biāo)的檢測算法。該算法利用歸一化的Mann-Whitney秩和統(tǒng)計量自適應(yīng)調(diào)整判決??????閾值,使用Mean shift進(jìn)行碼本中碼字和方差的更新。
2017-09-08 15:20:4616 針對復(fù)雜運動背景中慢速小目標(biāo)檢測誤檢率高,實時性差等問題,提出了基于自適應(yīng)閡值分割的慢速小目標(biāo)檢測算法。首先計算連續(xù)兩幀圖像特征點的金字塔光流場,對光流場進(jìn)行濾波,獲取匹配特征點集合。然后對圖像運動
2017-11-09 15:17:321 提出一種新的基于粒子群優(yōu)化算法的屬性異常檢測算法。該算法利用粒子群優(yōu)化算法簡單、尋優(yōu)速度快的優(yōu)點檢測屬性異常,在粒子群尋找最優(yōu)值的過程中發(fā)現(xiàn)可能是屬性異常的數(shù)據(jù),并采用0-measure適應(yīng)度評估
2017-11-20 09:21:374 種改進(jìn)的ViBe算法,以達(dá)到快速消除鬼影的目的,更準(zhǔn)確地完成前景目標(biāo)提取。在道路上設(shè)置固定檢測區(qū)域,根據(jù)運動目標(biāo)在固定檢測區(qū)域的運動軌跡來建立或者消除非固定虛擬線圈,再進(jìn)一步使用虛擬線圈的車流量檢測算法實現(xiàn)車流量統(tǒng)計
2017-12-08 14:56:390 本文針對現(xiàn)有的ML(Maximum Likelihood)檢測算法復(fù)雜度高,而傳統(tǒng)檢測算法性能不是很優(yōu)的問題,提出了一種新的檢測算法。新的檢測算法結(jié)合ZF-OSIC和ML檢測算法,根據(jù)ZF-OSIC
2017-12-29 14:52:210 異常檢測,顧名思義就是檢測異常的算法,比如網(wǎng)絡(luò)質(zhì)量異常、用戶訪問行為異常、服務(wù)器異常、交換機(jī)異常和系統(tǒng)異常等,都是可以通過異常檢測算法來做監(jiān)控的,個人認(rèn)為這種算法很值得我們做監(jiān)控的去借鑒引用,所以我會先單獨介紹這一部分的內(nèi)容。
2018-04-11 14:20:0020300 
針對現(xiàn)代化工廠巾視覺機(jī)器人或智能終端處理多目標(biāo)檢測算法的計算任務(wù)繁重、運算速度較慢等問題,將網(wǎng)絡(luò)通信技術(shù)應(yīng)用到算法處理巾進(jìn)行了在線檢測。對TCP/IP協(xié)議進(jìn)行了研究,建立了智能終端和云端之間的關(guān)系
2018-03-02 10:51:540 同時目標(biāo)檢測算法對于不常見的的比例或新的圖像分布缺乏一定的泛化能力。由于物體可能的方向和尺寸比例各不相同,算法有限的比例變化對于特殊目標(biāo)的檢測就會失效。為了解決這一問題,研究人員對數(shù)據(jù)進(jìn)行了旋轉(zhuǎn)和HSV的隨機(jī)增強,是算法對于不同傳感器、大氣條件和光照條件具有更強的魯棒性。
2018-06-01 16:35:0812825 基于深度學(xué)習(xí)的算法在圖像和視頻識別任務(wù)中取得了廣泛的應(yīng)用和突破性的進(jìn)展。
2018-10-27 07:28:1713996 針對目前基于深度卷積神經(jīng)網(wǎng)絡(luò)的顯著性檢測算法存在對復(fù)雜場景圖像目標(biāo)檢測不完整、背景噪聲多的問題,提出一種深度特征導(dǎo)向顯著性檢測算法。該算法是基于現(xiàn)有底層特征與深度卷積特征融合模型(ELD)的改進(jìn)
2019-11-15 17:56:070 物體檢測一向是比較熱門的研究方向,它經(jīng)歷了傳統(tǒng)的人工設(shè)計特征+淺層分類器的框架,到基于大數(shù)據(jù)和深度神經(jīng)網(wǎng)絡(luò)的End-To-End的物體檢測框架的發(fā)展,然而許多人其實并未系統(tǒng)的了解過物體檢測算法的整個
2020-10-22 15:07:583307 
針對目前基于深度卷積神經(jīng)網(wǎng)絡(luò)的顯著性檢測算法存在對復(fù)雜場景圖像目標(biāo)檢測不完整,背景噪聲多的問題,提出一種深度特征導(dǎo)向顯著性檢測算法。該算法是基于現(xiàn)有底層特征與深度卷積特征融合模型(ELD)的改進(jìn)
2020-11-03 16:31:440 目前,基于深度學(xué)習(xí)算法的一系列目標(biāo)檢測算法大致可以分為兩大流派: 兩步走(two-stage)算法:先產(chǎn)生候選區(qū)域然后再進(jìn)行CNN分類(RCNN系列) 一步走(one-stage)算法:直接對輸入
2020-11-27 10:15:564282 針對基于深度學(xué)習(xí)的目標(biāo)跟蹤算法模型參數(shù)多、難以部署于嵌入式設(shè)備上的問題,提出一種改進(jìn)的孿生卷積網(wǎng)絡(luò)實時目標(biāo)跟蹤算法。設(shè)計一個非對稱卷積模塊來構(gòu)建整個網(wǎng)絡(luò)框架,通過非對稱卷積模塊的壓縮層減少模型
2021-03-11 10:41:0410 為提升原始SSD算法的小目標(biāo)檢測精度及魯棒性,提出一種基于通道注意力機(jī)制的SSD目標(biāo)檢測算法。在原始SSD算法的基礎(chǔ)上對高層特征圖進(jìn)行全局池化操作,結(jié)合通道注意力機(jī)制增強高層特征圖的語義信息,并利用
2021-03-25 11:04:0620 為實現(xiàn)復(fù)雜駕駛環(huán)境下駕駛?cè)藛T疲勞狀態(tài)識別與預(yù)警,提出基于深度學(xué)習(xí)的疲勞駕駛檢測算法。利用基于 shuffle- channel思想的 MTCNN模型檢測常規(guī)攝像頭實時采集的駕駛?cè)藛T人臉圖像
2021-03-30 09:17:5525 。為了獲得更妤的癲癇檢測效果,提岀了一種融合深度和淺層特征的多視角癲癇檢測算法該算法首先使用FFT和WPD來獲取EEG信號頻域和時頻域的淺層特征;然后使用CNN網(wǎng)絡(luò)學(xué)習(xí)得到頻域和時頻域的深度特征;進(jìn)一步使用多視角TSK模糊系統(tǒng)對淺層和
2021-04-07 10:58:038 隨著人臉識別技術(shù)的發(fā)展,人臉欺詐攻擊已經(jīng)成為一項實際的安全問題,人臉欺詐檢測算法用于及早發(fā)現(xiàn)該類攻擊保護(hù)系統(tǒng)安全。文中將一種經(jīng)典域自適應(yīng)算法擴(kuò)展到深度神經(jīng)網(wǎng)絡(luò)中,首先定義了基于深度特征増廣的域自適應(yīng)
2021-04-15 09:40:354 整體框架 目標(biāo)檢測算法主要包括:【兩階段】目標(biāo)檢測算法、【多階段】目標(biāo)檢測算法、【單階段】目標(biāo)檢測算法 什么是兩階段目標(biāo)檢測算法,與單階段目標(biāo)檢測有什么區(qū)別? 兩階段目標(biāo)檢測算法因需要進(jìn)行兩階
2021-04-30 10:22:0411402 
文中提出了一種基于激光雷達(dá)點云的三維目標(biāo)檢測算法 Voxeircnn( Voxelization Region-based Convolutional Neural Networks),該算法
2021-05-08 16:35:2445 在移動霧計算中,霧節(jié)點與移動終端用戶之間的通信容易受到偽裝攻擊,從而帶來通信和數(shù)據(jù)傳輸?shù)陌踩珕栴}。基于移動霧環(huán)境下的物理層密鑰生成策略,提出一種基于強化學(xué)習(xí)的偽裝攻擊檢測算法。構(gòu)建移動霧計算中的偽裝
2021-05-11 11:48:395 檢測算法,對視頻中的車輛目標(biāo)進(jìn)行提取,提出了結(jié)合運動特征和表觀特征的多目標(biāo)追蹤算法;在此基礎(chǔ)上,又提出了一種基于車輛軌跡特征的異常事件檢測方法,其中的追蹤算法減少了軌跡提取過程對背景環(huán)境變化的依賴。在異常事件
2021-05-13 14:45:335 基于單激發(fā)探測器(SSD)的小目標(biāo)檢測算法實時性較差且檢測精度較低。為提高小目標(biāo)檢測精度和魯棒性提出一種結(jié)合改進(jìn)密集網(wǎng)絡(luò)和二次回歸的小目標(biāo)檢測算法。將SSD算法中骨干網(wǎng)絡(luò)由ⅤGG16替換為特征提取
2021-05-27 14:32:095 為對結(jié)構(gòu)性數(shù)據(jù)的髙效干擾進(jìn)行檢測,以線性分組碼為研究對象,在經(jīng)典能量檢測算法的噪聲模型中加入惡意干擾信號,推導(dǎo)二元假設(shè)模型中檢驗統(tǒng)計量的數(shù)學(xué)表達(dá)式。在此基礎(chǔ)上,以虛警率與漏檢率之和最小為準(zhǔn)則提出一
2021-05-27 15:15:177 針對一階段目標(biāo)檢測算法在識別小目標(biāo)時無法兼顧精度與實時性的問題,提出一種基于多尺度融合單點多盒探測器(SSD)的小目標(biāo)檢測算法。以SSD和DSSD算法的網(wǎng)絡(luò)結(jié)構(gòu)為基礎(chǔ),設(shè)計融合模塊以實現(xiàn)
2021-05-27 16:32:239 深度神經(jīng)網(wǎng)絡(luò)在目標(biāo)檢測領(lǐng)域具有優(yōu)異的檢測性能,但其結(jié)構(gòu)復(fù)雜、計算量大,難以在嵌入式設(shè)備上進(jìn)行髙性能的實時目標(biāo)檢測。針對該問題,提出一種基于 YOLOV3的目標(biāo)檢測算法。采用半精度推理策略提高YOLO
2021-05-28 14:05:527 差等缺陷,為此,提出一種基于深度信念網(wǎng)絡(luò)(DBN)的DDoS攻擊檢測算法。分析SDN環(huán)境下DDoS攻擊的機(jī)制,通過Wininet模擬SDN的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu),并使用 Wireshark完成DDoS流量數(shù)據(jù)包的收集和檢測。實驗結(jié)果表明,與ⅹ Gboost、隨機(jī)森林、支持向量機(jī)算法相比,該算法具有
2021-06-01 16:28:345 針對人工和傳統(tǒng)自動化算法檢測發(fā)動機(jī)零件表面缺陷中準(zhǔn)確率和效率低下,無法滿足智能制造需求問題提岀了一種基于深度學(xué)習(xí)的檢測算法。以 Faster r-CNN深度學(xué)習(xí)算法為算法框架,引入聚類理論來確定
2021-06-03 14:51:5419 的研究背景、意義及難點,接著對基于深度學(xué)習(xí)目標(biāo)檢測算法的兩大類進(jìn)行綜述,即基于候選區(qū)域和基于回歸算法.對于第一類算法,先介紹了基于區(qū)域的卷積神經(jīng)網(wǎng)絡(luò)(Region with Convolutional Neural Network,R-CNN)系列算法,然后從四個維度綜述了研
2022-01-06 09:14:582640 
時會出現(xiàn)漏檢甚至錯檢的情況,提出一種改進(jìn)的SSD目標(biāo)檢測算法,以提高中小目標(biāo)檢測的準(zhǔn)確性.運用Gradient-weighted Class Activation Mapping (Grad-CAM)技術(shù)對檢測
2022-01-21 08:40:141322 (Deep Convolutional Neural Networks)憑借其特征學(xué)習(xí)和遷移學(xué)習(xí)的強大能力在圖像分類方面取得了一系列突破,在目標(biāo)檢測方面,它越來越受到人們的重視。因此,如何將CNN應(yīng)用于目標(biāo)
2022-02-11 08:51:111668 一種改進(jìn)的高光譜圖像CEM目標(biāo)檢測算法 ? 來源:《?應(yīng)用物理》?,作者付銅銅等 摘要:? 約束能量最小化(Constrained Energy Minimization, CEM)目標(biāo)檢測算法
2022-03-05 15:47:031930 
紅外單幀弱小目標(biāo)檢測算法主要通過圖像預(yù)處理突出小目標(biāo)同時抑制背景噪聲干擾,之后采用閾值分割提取疑似目標(biāo),最后根據(jù)特征信息進(jìn)行目標(biāo)確認(rèn)。
2022-08-04 17:20:098049 對象跟蹤問題一直是計算機(jī)視覺的熱點任務(wù)之一,簡單的可以分為單目標(biāo)跟蹤與多目標(biāo)跟蹤,最常見的目標(biāo)跟蹤算法都是基于檢測的跟蹤算法,首先發(fā)現(xiàn)然后標(biāo)記,好的跟蹤算法必須具備REID的能力。今天小編斗膽給大家推薦一個結(jié)合傳統(tǒng)算法跟深度學(xué)習(xí),特別好用的對象跟蹤算法框架DeepSort
2022-09-14 16:20:053643 R-CNN 算法在 2014 年提出,可以說是歷史性的算法,將深度學(xué)習(xí)應(yīng)用于目標(biāo)檢測領(lǐng)域,相較于之前的目標(biāo)檢測方法,提升多達(dá) 30% 以上
2022-10-31 10:08:052662 針對深度學(xué)習(xí)算法在多目標(biāo)跟蹤中的實時性問題, 提出一種基于MobileNet的多目標(biāo)跟蹤算法. 借助于MobileNet深度可分離卷積能夠?qū)?b class="flag-6" style="color: red">深度網(wǎng)絡(luò)模型進(jìn)行壓縮的原理, 將YOLOv3主干網(wǎng)絡(luò)替換
2022-11-09 10:23:301764 
在計算機(jī)視覺領(lǐng)域,我們經(jīng)常需要做一些特殊的任務(wù),而這些任務(wù)中經(jīng)常會用到直線檢測算法,比如車道線檢測、長度測量等。盡管直線檢測的任務(wù)看起來比較簡單,但是在具體的應(yīng)用過程中,你會發(fā)現(xiàn)這里面還是有很大的優(yōu)化空間,本文對常用的一些比較經(jīng)典的直線檢測算法進(jìn)行匯總
2022-11-25 17:25:211931 解開車輛檢測算法之謎
2023-01-05 09:43:382042 
基于深度學(xué)習(xí)的目標(biāo)檢測方法根據(jù)有無區(qū)域提案階段劃分為區(qū)域提案檢測模型和單階段檢測模型
2023-02-27 15:31:492219 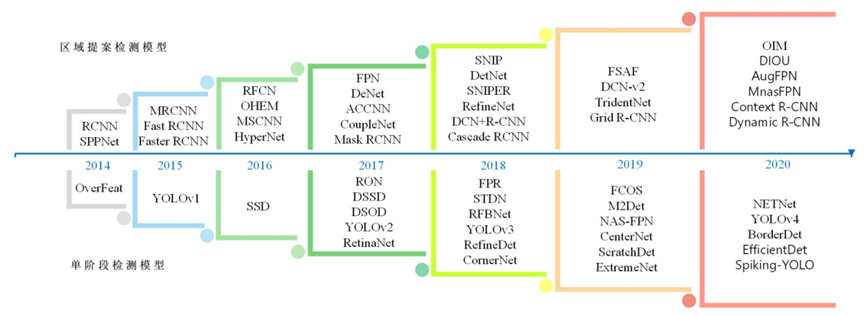
現(xiàn)在目標(biāo)檢測算法總結(jié)
1. 目標(biāo)檢測算法在機(jī)動車和行人檢測識別上應(yīng)用較多,在非機(jī)動車上應(yīng)用較少
2. 對于目標(biāo)檢測模型增強特征表示和引入上下文信息的改進(jìn)方法幾乎對任何場景和任何任務(wù)都是有利
2023-06-06 09:40:120 ,也是近年來理論研究的熱點。作為計算機(jī)視覺中的基礎(chǔ)算法,目標(biāo)檢測對后續(xù)的人臉識別、目標(biāo)跟蹤、實例分割等任務(wù)都起著至關(guān)重要的作用。 基于深度學(xué)習(xí)的卷積學(xué)習(xí)網(wǎng)絡(luò)(CNN)在目標(biāo)檢測任務(wù)上取得了優(yōu)越的性能,例如FasterRCNN、
2023-06-25 10:37:481270 
導(dǎo)讀 本文主要講述:1.無Anchor的目標(biāo)檢測算法:YOLOv1,CenterNet,CornerNet的邊框回歸策略;2.有Anchor的目標(biāo)檢測算法:SSD,YOLOv2,F(xiàn)aster
2023-07-17 11:17:051917 
摘要:基于強化學(xué)習(xí)的目標(biāo)檢測算法在檢測過程中通常采用預(yù)定義搜索行為,其產(chǎn)生的候選區(qū)域形狀和尺寸變化單一,導(dǎo)致目標(biāo)檢測精確度較低。為此,在基于深度強化學(xué)習(xí)的視覺目標(biāo)檢測算法基礎(chǔ)上,提出聯(lián)合回歸與深度
2023-07-19 14:35:020 掌握基于Transformer的目標(biāo)檢測算法的思路和創(chuàng)新點,一些Transformer論文涉及的新概念比較多,話術(shù)沒有那么通俗易懂,讀完論文仍然不理解算法的細(xì)節(jié)部分。
2023-08-16 10:51:261016 
深度學(xué)習(xí)算法簡介 深度學(xué)習(xí)算法是什么?深度學(xué)習(xí)算法有哪些?? 作為一種現(xiàn)代化、前沿化的技術(shù),深度學(xué)習(xí)已經(jīng)在很多領(lǐng)域得到了廣泛的應(yīng)用,其能夠不斷地從數(shù)據(jù)中提取最基本的特征,從而對大量的信息進(jìn)行機(jī)器學(xué)習(xí)
2023-08-17 16:02:5610417 什么是深度學(xué)習(xí)算法?深度學(xué)習(xí)算法的應(yīng)用 深度學(xué)習(xí)算法被認(rèn)為是人工智能的核心,它是一種模仿人類大腦神經(jīng)元的計算模型。深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一種變體,主要通過變換各種架構(gòu)來對大量數(shù)據(jù)進(jìn)行學(xué)習(xí)以及分類處理
2023-08-17 16:03:043075 深度學(xué)習(xí)框架和深度學(xué)習(xí)算法教程 深度學(xué)習(xí)是機(jī)器學(xué)習(xí)領(lǐng)域中的一個重要分支,多年來深度學(xué)習(xí)一直在各個領(lǐng)域的應(yīng)用中發(fā)揮著極其重要的作用,成為了人工智能技術(shù)的重要組成部分。許多深度學(xué)習(xí)算法和框架提供了
2023-08-17 16:11:261829 是解決具體問題的一系列步驟,機(jī)器學(xué)習(xí)的算法被設(shè)計用于從大量的數(shù)據(jù)中自動學(xué)習(xí)并不斷改進(jìn)自身的性能。本文將為大家介紹機(jī)器學(xué)習(xí)算法匯總和分類,以及常用的機(jī)器學(xué)習(xí)算法模型。 機(jī)器學(xué)習(xí)算法匯總 機(jī)器學(xué)習(xí)算法的類型繁多,主
2023-08-17 16:11:481943 智慧礦山AI算法系列中的堵料檢測算法的功能優(yōu)勢,了解其重要性和帶來的價值
2023-09-28 18:48:061385 
人員跌倒識別檢測算法是基于視頻的檢測方法,通過對目標(biāo)人體監(jiān)測,當(dāng)目標(biāo)人體出現(xiàn)突然倒地行為時,自動監(jiān)測并觸發(fā)報警。人員跌倒識別檢測算法基于計算機(jī)識別技術(shù),配合現(xiàn)場攝像頭,自動識別如地鐵手扶梯/樓梯
2024-06-30 11:47:221123 
在計算機(jī)視覺領(lǐng)域,目標(biāo)檢測一直是研究的熱點和難點之一。特別是在小目標(biāo)檢測方面,由于小目標(biāo)在圖像中所占比例小、特征不明顯,使得檢測難度顯著增加。隨著深度學(xué)習(xí)技術(shù)的快速發(fā)展,尤其是卷積神經(jīng)網(wǎng)絡(luò)(CNN
2024-07-04 17:25:282655 隨著AI技術(shù)的發(fā)展,目標(biāo)檢測算法也迎來重大突破。睿創(chuàng)微納作為熱成像領(lǐng)軍者,憑借深厚的技術(shù)積累與創(chuàng)新能力,結(jié)合AI技術(shù)推出新一代目標(biāo)檢測算法,以三大核心技術(shù)帶來AI視覺感知全場景解決方案突破,助力各產(chǎn)業(yè)智能化升級。
2025-03-20 13:49:07919 在 AI 技術(shù)蓬勃發(fā)展的當(dāng)下,目標(biāo)檢測算法取得了重大突破,其中紅外目標(biāo)檢測算法更是在汽車行業(yè)掀起了波瀾壯闊的變革,從根本上重塑著汽車的安全性能、駕駛體驗與產(chǎn)業(yè)生態(tài)。
2025-03-27 15:55:15832 車輛檢測是一種基于深度學(xué)習(xí)的對人進(jìn)行檢測定位的目標(biāo)檢測,能廣泛的用于園區(qū)管理、交通分析等多種場景,是違停識別、堵車識別、車流統(tǒng)計等多種算法的基石算法。
2025-04-14 16:00:18748 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論