在無人機中,飛控系統(tǒng)是主要組成部分,而姿態(tài)增穩(wěn)控制則是對無人機順利執(zhí)行各項任務的有效方法。本文以實際應用為背景,詳細介紹了基于三軸陀螺和傾角傳感器構(gòu)成全姿態(tài)增穩(wěn)控制系統(tǒng)的硬件實現(xiàn)及軟件設(shè)計,并將
2015-04-23 13:49:18 9374
9374 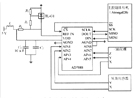
團隊研發(fā)的晶圓級磁光克爾測試儀,對比國外同類設(shè)備,這臺儀器在測試精度和速度等方面進行了技術(shù)革新,實現(xiàn)了自主創(chuàng)新突破。據(jù)了解,該儀器現(xiàn)已應用于科研領(lǐng)域,且預計于今年10月在產(chǎn)業(yè)領(lǐng)域投入商用。四中國核聚變
2021-07-06 10:02:35
什么是SOI技術(shù)?在實現(xiàn)CAN收發(fā)器EMC優(yōu)化方面有哪些重大突破?
2021-05-10 06:42:44
了一個更寬廣的范圍。因此,我們一起創(chuàng)造了一個平臺,可實現(xiàn)跨越入門級(緊湊型斯柯達法比亞)到中檔(大眾高爾夫或大眾捷達)再到優(yōu)質(zhì)(緊湊型奧迪A3)的系統(tǒng)。您會瞄準高端汽車嗎?您會改變預算以增加成本獲得一個
2019-07-17 04:45:02
大眾計劃截至2016年,為中國的合資公司投入140億歐元,使產(chǎn)能在2018年達到400萬輛,并為其全資子公司投入10億歐元。大眾中國總裁海茲曼表示:“更重要的是,大眾把中國視為實現(xiàn)技術(shù)創(chuàng)新和在環(huán)境
2012-12-04 19:46:51
轉(zhuǎn)換器把這部分功率輸送到主電網(wǎng),同時執(zhí)行主電網(wǎng)運營商設(shè)立的各種管控規(guī)則。能量緩沖器會吸收掉兩個轉(zhuǎn)換器之間功率流的差值。成功實現(xiàn)這個過程在很大程度上取決于你為能量緩沖器選擇的逆變電容。 通過安裝能量緩沖器
2013-05-20 14:38:26
一. 簡介
在之前的文章中(很久之前了,已經(jīng)通過FPGA獲取到了MPU6050的六軸數(shù)據(jù): 三軸加速 和 三軸角速度,但是沒有對它進行然后處理。那么在本篇文章中,將利用Cordic算法來進行姿態(tài)解算
2023-06-08 13:49:26
互聯(lián)網(wǎng)裁員寒冬來襲,悲傷逆流成河,Java程序員如何絕地求生?
2019-06-26 06:39:11
在資本寒冬下,Java程序員該何去何從?
2019-06-26 10:46:49
MPU6050姿態(tài)解算的原理是什么?MPU6050姿態(tài)解算的程序該如何去是實現(xiàn)呢?
2021-12-17 07:14:26
本帖最后由 jxlde 于 2016-6-7 15:11 編輯
各位大牛來幫幫忙啊,學生狗求助,課設(shè)題目如下:現(xiàn)在已經(jīng)可以得到roll,yaw,pitch三個角了,但是顯示屏如何以圖案指針顯示就不會了(建立圖形隨姿態(tài)轉(zhuǎn)動),懇請各位大牛講詳細些
2016-06-06 21:03:39
我的STM32平衡車,姿態(tài)結(jié)算,速度捕獲,PWM驅(qū)動都實現(xiàn)了,現(xiàn)在就是調(diào)不了平衡,請教下大家,角度,角速度,速度的參數(shù),這三者之間的正負關(guān)系是怎么判定的?我的小車用Y軸上的角速度和x軸方向的角度,通過測試,前傾的時候,角度為負,角速度也為負,速度往前傾方向順時針旋轉(zhuǎn)也為負
2019-01-17 03:57:17
labview中怎么實現(xiàn)FFT和逆FFT并播放波形
2012-06-28 00:25:11
飛行器中使用到了四元數(shù)和歐拉角,姿態(tài)解算的核心在于旋轉(zhuǎn)。姿態(tài)解算中使用四元數(shù)來保存飛行器的姿態(tài),包括旋轉(zhuǎn)和方位。在獲得四元數(shù)之后,會將其轉(zhuǎn)化為歐拉角,然后輸入到姿態(tài)控制算法中。姿態(tài)控制算法的輸入?yún)?shù)
2019-07-14 05:00:00
、實驗總結(jié)通過此實驗已經(jīng)完美的獲取了MPU6050六軸陀螺傳感器的數(shù)據(jù)讀取,姿態(tài)解算的方法,同時結(jié)合COF屏完美的展示了MPU6050姿態(tài)的可視化。在實驗測試中,COF屏在完成負載的儀表界面顯示時,依然
2022-04-11 01:08:47
中國在量子科技領(lǐng)域又有新突破!《科學》雜志每年都會評選出當年科技領(lǐng)域最為重要的十大突破,業(yè)界期待的2019年科技領(lǐng)域十大突破已在近期公布,量子霸權(quán)位于十大突破之列。今年9月,谷歌的物理學家聲稱實現(xiàn)了
2021-07-28 07:38:57
昨天剛?cè)胧职l(fā)燒友的MiniFly 在看資料的時候有一個地方一直理解不了,請大家?guī)臀医忉屢幌聠h為什么在姿態(tài)角的描述中機頭的方向就變成了z呢?
2019-06-21 04:37:54
僅僅利用6軸姿態(tài)模塊來計算,物體的運動軌跡能不能實現(xiàn)?
本人采用stm32f103采集姿態(tài)模塊數(shù)據(jù),姿態(tài)模塊采用的是維特jy901s,為什么積分計算距離之后誤差非常大。
我還發(fā)現(xiàn)姿態(tài)模塊在靜止的時候也會有加速度產(chǎn)生,我該如何消除這個誤差呢,感謝各位大佬
2024-03-29 11:34:23
匿名飛控中仍然采用陀螺儀,加速度計和磁力計修正旋轉(zhuǎn)矩陣偏差,然后反推歐拉角的做法實現(xiàn)姿態(tài)解算過程。其飛控中時間分配如下:1000Hz任務:四元數(shù)更新,傳感器數(shù)據(jù)的讀取。誰讓是SPI通信呢…500Hz
2022-01-14 07:19:23
四軸在飛行的控制過程中可以用什么算法來控制?姿態(tài)
2023-10-12 07:03:10
嗨朋友們,我正在嘗試使用塊內(nèi)存生成器訪問存儲在ROM中的.coe文件。我想為此編寫一個verilog代碼。如何以verilog代碼訪問存儲在BRAM中的像素值?提前致謝。以上來自于谷歌翻譯以下為原文
2019-02-26 09:48:33
我正在嘗試為鍵盤和鼠標實現(xiàn)一個 USB 主機。我已成功實施此處顯示的演示主機已成功接收按鍵操作。我正在為如何以及在何處實現(xiàn)鍵盤的 LED 控件而苦苦掙扎。據(jù)我了解,這是通過
2022-12-20 07:45:31
嗨!我想實現(xiàn)圖中所示的架構(gòu)。可能嗎?有關(guān)使用iMPACT的FPGA菊花鏈的用戶指南,但無法找到任何有關(guān)的信息如何以菊花鏈方式編程每個閃存。你可以幫我嗎?謝謝
2020-07-19 14:21:59
我如何以這種方式加載DLL庫以及程序中的程序。非常感謝你的幫助,非常感謝你的時間,幻影 以上來自于谷歌翻譯 以下為原文Hello everybody,I'm currently trying
2019-06-20 08:33:01
傳統(tǒng)的姿態(tài)測量系統(tǒng)采用捷聯(lián)式慣導系統(tǒng)(SINS),相比平臺式慣導系統(tǒng)而言,其具有 體積相對更小,成本相對更低,易于安裝和維護并且可靠性更高的有點,因此,捷聯(lián)慣導系統(tǒng)在飛行器導航和姿態(tài)測量中得到了廣泛
2019-08-22 07:27:31
怎么實現(xiàn)基于iNEMO模塊的姿態(tài)檢測及數(shù)據(jù)傳輸系統(tǒng)設(shè)計?
2021-05-19 06:06:01
想找個在柳州市的Layout當老師本人在柳州,是個初學者,所學的專業(yè)是電子技術(shù)應用現(xiàn)在用的軟件是 :Altium Designer Summer 09在學習過程中,遇到很多的困難,最主要的就是布局了。局沒布好,線也走不好。所以想找一個老師教。本人QQ:1979991830。真心求助。。。。
2011-12-29 20:00:31
當寒冬是我們讓我們瑟瑟發(fā)抖時,對LED企業(yè)來說卻迎來了他們的春天。無論2015年的LED行業(yè)形勢是有多嚴峻,希望在2016年那些存活下來的LED企業(yè)能抓住機遇,戰(zhàn)勝挑戰(zhàn)。 競爭分水嶺 雖然
2016-01-20 15:18:51
無人機設(shè)計中姿態(tài)檢測算法、姿態(tài)控制算法有什么區(qū)別 ?推薦課程:張飛四旋翼飛行器視頻套件,76小時吃透四軸算法http://t.elecfans.com/topic/40.html?elecfans_trackid=bbs_post
2018-07-14 12:12:37
軸承異步電機進行動態(tài)解耦控制。經(jīng)解耦后的徑向位移子系統(tǒng)只與懸浮繞組電流和轉(zhuǎn)矩系統(tǒng)氣隙磁鏈有關(guān),耦合變量減少;而且逆系統(tǒng)模型中不再有負載轉(zhuǎn)矩變量,更便于逆系統(tǒng)的實現(xiàn)。
純分享帖,點擊下方附件免費獲取完整
2025-07-14 17:43:39
在SVG、有源逆變、變流器結(jié)構(gòu)中,都是通過全控晶體管實現(xiàn)全控輸出的,這些晶體管工作在開關(guān)狀態(tài),輸出電壓不是高電平就是低電平,輸出波形是頻率一定脈寬可調(diào)的PWM波形,有源逆變和變流器在輸出側(cè)和電網(wǎng)之間
2024-01-19 09:34:31
`淺談“人臉識別”的突破和創(chuàng)新 近年來,安防行業(yè)掀起了一波人臉識別的浪潮,眾多廠商紛紛推出了相關(guān)產(chǎn)品,瞬間,人臉識別成為了行業(yè)內(nèi)的熱點技術(shù)方向。在2014年中國國際社會公共安全博覽會上,至少有20家
2017-08-26 12:44:28
用DSP實現(xiàn)SPWM逆變電路,正弦波可以出來,但是測得的直流電壓太小是什么原因呢
2016-07-15 16:23:16
視頻監(jiān)控技術(shù)在火災報警領(lǐng)域有哪些新突破?
2021-06-01 06:47:05
大佬們57.6V的電壓輸入全橋逆變電路為啥就輸出36V了?還有全橋逆變電路中要怎么計算呢
2018-07-30 15:17:24
轉(zhuǎn)化成最后供控制算法使用的三個當前飛行器角度 φ, θ, ψ。使用四元數(shù)的原因除了沒有 Gimbal lock,還有運算量小,適合運算能力差的嵌入式平臺。我的問題是在我上述的無人機姿態(tài)控制過程中,沒有
2019-05-30 01:05:37
等因素,拍攝的圖像質(zhì)量較差,圖像幀數(shù)較低,不能滿足觀測拍攝降落傘拉直充氣過程的要求。 應用介紹:高速攝像系統(tǒng)借助高速相機在傘降-目標跟蹤應用中則完美解決了以上問題,該系統(tǒng)跟蹤圖像記錄時間可以超過12
2016-04-07 15:14:38
討論了分布式衛(wèi)星系統(tǒng)中衛(wèi)星姿態(tài)變化、地球自轉(zhuǎn)、衛(wèi)星環(huán)繞等因素,及對小衛(wèi)星間基線測量引起的誤差。分析了衛(wèi)星姿態(tài)變化帶來的基線誤差對干涉SAR測高的影響。理論分析和
2009-02-19 23:39:11 19
19 根據(jù)微型飛行器(MAV)特點,提出了數(shù)據(jù)記錄儀的設(shè)計要求,完成了適用于姿態(tài)測量的微型數(shù)據(jù)記錄儀的集成化設(shè)計,實現(xiàn)了相關(guān)指標要求,并在工程實踐中得到了應用驗證。關(guān)
2009-06-26 10:27:2235 為了提高衛(wèi)星姿態(tài)測量系統(tǒng)的姿態(tài)估計精度,研究設(shè)計了一個模糊神經(jīng)網(wǎng)絡(luò),對各姿態(tài)傳感器的輸出信號進行綜合處理。研究表明:此方法可以使測量精度得以很大提高。關(guān)
2009-07-13 11:34:0522 在電子羅盤試驗中沒有經(jīng)濟便攜的顯示終端給研究工作造成了不便,本文選用運行Palm OS的PDA作為數(shù)據(jù)終端,對HMR3300型數(shù)字羅盤輸出的姿態(tài)進行接收和處理,并把姿態(tài)顯示在PDA上。文
2009-08-31 16:38:0415 摘要:矩陣運算廣泛應用于各類電路計算中,矩陣運算的硬件實現(xiàn)能夠充分發(fā)揮硬件的速度和并行性。其中矩陣求逆是矩陣運算中重要的運算,針對目前多維矩陣難以設(shè)計的情況,
2009-12-14 11:38:0526 本文針對電廠中除氧器對象被控對象非線性、強耦合的問題,采用神經(jīng)網(wǎng)絡(luò)逆控制的方法對除氧器系統(tǒng)進行解耦,結(jié)合基于神經(jīng)網(wǎng)絡(luò)的參數(shù)自適應PID 控制算法來實現(xiàn)對被控對象的
2009-12-16 15:23:2312 以直接面積等效法為基礎(chǔ),通過對頻率進行分段處理設(shè)計并實現(xiàn)了以DSP 為控制核心的寬頻逆變實驗系統(tǒng)。首先分析算法的原理,然后討論基于DSP 的逆變軟件流程,最后構(gòu)建硬件
2009-12-18 14:46:5516 為了實現(xiàn)復雜的運動與導航控制,需獲取控制對象的空間姿態(tài)信息,設(shè)計了基于四自由度(4DoF)IMU慣性測量傳感器和C8051F330單片機的姿態(tài)測量系統(tǒng)。介紹了ADIS16300慣性測量傳感器的
2010-07-21 15:25:1123 位置姿態(tài)系統(tǒng)(POS)可提供高精度導航信息,傳輸數(shù)據(jù)量大,實時性高。本文采用W3100A芯片和導航計算機構(gòu)成網(wǎng)絡(luò)處理平臺,在下位機中實現(xiàn)了POS網(wǎng)絡(luò)通信程序,包括TCP中斷接收程序和
2010-08-03 15:50:3214
UC3637雙PWM控制器在逆變控制電路中的應用
摘要:詳細介紹了UC3637的特點,工作原理,將其應用于逆變控制電路中的有
2009-07-16 09:24:072464 
晶振生產(chǎn)商TXC危機中逆市成長
在晶振領(lǐng)域日系廠商一直是市場的主流廠商,尤其是在高端產(chǎn)品,日本的晶體產(chǎn)品響譽全球。但現(xiàn)在一家臺灣的晶振生產(chǎn)商
2010-03-25 11:56:461230 摘要:本文主要介紹了微型存儲測試系統(tǒng)在姿態(tài)測量中的設(shè)計,結(jié)合飛行體在飛行時各種變化姿態(tài)的采集,編
2010-11-07 10:54:151483 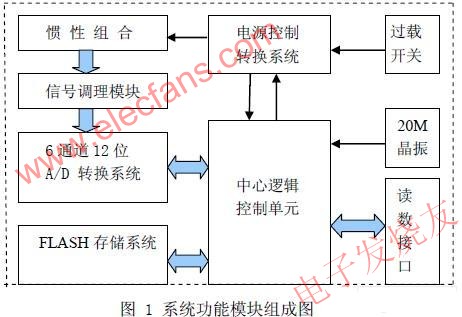
為了增強人機交互的交互性以及遙控操作的可控性,設(shè)計并實現(xiàn)了一款基于磁場傳感器與微加速度計的人手姿態(tài)檢測系統(tǒng)。利用坐標變換理論,通過磁場傳感器數(shù)據(jù)解算姿態(tài)的翻滾角和
2011-09-09 11:35:2966 將Undeland緩沖電路用于IGBT逆變橋中,通過合理的歸并元器件,提出了一種簡單、實用的多橋臂逆變電路緩沖拓撲結(jié)構(gòu)。并通過一個400 Hz逆變電路的仿真和實驗波形得到驗證。
2011-09-23 16:12:1052 本文主要討論模擬數(shù)字轉(zhuǎn)換在SDR實現(xiàn)中的挑戰(zhàn),以及ADC的哪些突破可以促進軟件無線電的實際應用。
2012-03-22 10:56:432159 
有源逆變放電裝置在電力直流操作電源中的應用分析。
2016-03-31 09:53:5910 SVPWM逆變技術(shù)在光伏發(fā)電系統(tǒng)中的應用
2016-04-13 16:12:1114 濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)濾波在飛行器姿態(tài)獲取系統(tǒng)中的實現(xiàn)
2016-06-08 17:29:360 姿態(tài)控制中的散開現(xiàn)象_何朕
2017-01-08 12:03:280 TMS320系列DSP在逆變焊機中的應用研究
2017-10-20 09:12:4312 本文主要介紹了基于STM32的四旋翼飛行姿態(tài)串級控制的設(shè)計與實現(xiàn),行器控制器通過處理微型MEMS慣性器件和三維地磁傳感器采集的數(shù)據(jù),計算飛行器的姿態(tài)角,并根據(jù)飛行指令,結(jié)合相應的控制律給出適當?shù)目刂菩盘枺刂骑w行器姿態(tài)和位置。能夠實現(xiàn)飛行姿態(tài)的穩(wěn)定控制,達到了設(shè)計的目的。
2017-12-23 15:24:368966 
研究了PWM控制技術(shù)在單相橋式逆變電路中的應用,首先詳細地闡述了PWM控制技術(shù)的基本原理,簡要地介紹了單相橋式逆變電路的工作原理,然后將PWM控制技術(shù)應用到單相橋式逆變電路中,最后通過仿真結(jié)果驗證了理論分析的正確性。
2018-02-08 20:16:5322063 
mpu6050常用作提供飛控運行時的姿態(tài)測量和計算。本文首先介紹了MPU6050姿態(tài)解算的原理,其次詳細的介紹了mpu6050姿態(tài)解算程序。
2018-03-09 09:15:2444992 大眾燃料電池技術(shù)突破?承認比純電動優(yōu)勢明顯
2018-09-28 14:35:434669 本文詳細分析了四軸飛行器姿態(tài)解算原理以及算法程序實現(xiàn)
2019-02-18 08:00:001 小米集團公布2018全年財報,報告期內(nèi)實現(xiàn)總營收1749億元人民幣,同比增長52.6%,經(jīng)調(diào)整利潤86億元人民幣,同比增長59.5%。在全球手機市場低迷的現(xiàn)狀下,成功實現(xiàn)逆市增長。
2019-03-21 16:06:535220 對于大部分AI芯片公司而言,如何度過2019年的資本寒冬是他們更關(guān)注的問題。在資本寒冬,投資機構(gòu)為了安全考慮,還是投資頭部企業(yè)。隨著AI應用的普及,市場上基于云端和終端的應用需求誕生了一系列AI芯片公司,掀起了一波熱潮。
2019-03-22 13:59:181951 據(jù)悉,臺灣工業(yè)技術(shù)研究院(ITRI)下屬的電子與光電子系統(tǒng)研究實驗室(EOSRL)日前宣布,在Micro LED芯片巨量轉(zhuǎn)移技術(shù)上實現(xiàn)了重大突破。
2019-05-24 15:29:252509 近日,上海積塔公司投資359億元的半導體項目再次獲得增資,將打造國內(nèi)唯一的汽車級IGBT專業(yè)產(chǎn)線和國內(nèi)首家實現(xiàn)6英寸碳化硅量產(chǎn)線。在全球半導體市場相對低迷的情況下,全球汽車廠商將轉(zhuǎn)戰(zhàn)新能源汽車,車用半導體或?qū)⒊霈F(xiàn)逆“市”曙光,成為今年一抹亮色。
2019-06-08 17:42:003185 一般使用NMOS管來實現(xiàn)逆變電路,如下圖所示是三相逆變常用的逆變電路,由六個NMOS管構(gòu)成的橋式電路。在逆變時,上下橋臂的兩個NMOS不同時導通,上管和相鄰的下管輪換導通。六個MOS管需要六個輸入信號來控制,輸入信號有兩種方案,:1)輸入為PWM方波,輸出梯形波;2)輸入為SPWM,輸出為正弦波。
2019-10-03 09:50:0010709 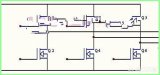
微軟在30多年前開辦微軟研究院時,已開始投入大量的人力物力在語音和語言上。近幾年來,微軟在語音識別上首先取得突破,在2016年,語音識別的準確度已達到跟人相似的水平。
2019-10-13 09:13:00788 大眾宣布在德國漢堡已經(jīng)成功測試了自動駕駛的高爾夫電動車,汽車在漢堡內(nèi)城區(qū)成功的自動駕駛了三公里。大眾研發(fā)工程師Simon Grossjohann表示汽車幾乎做到了完全自動駕駛,只有在垃圾回收車堵住了公路時工程師時手動操作了汽車。
2019-11-12 17:35:133285 近日,一汽大眾發(fā)布消息稱,其2019年度累計銷量突破200萬輛;12月17日,隨著第200萬輛整車在長春基地總裝車間下線,一汽大眾又完成了“產(chǎn)量突破200萬輛”成績。
2019-12-27 15:41:334209 在美劇《西部世界》中,AI主人公覺醒,并意識到這個世界是人類殺伐決斷的樂園,于是開啟了反抗之路;電影《黑客帝國》中,AI將人類豢養(yǎng)起來,控制了整個世界……那么在科幻世界中擁有了意識的AI,在未來生活中能否實現(xiàn)?
2020-05-17 10:58:13881 近日,騰訊優(yōu)圖實驗室在人體2D姿態(tài)估計任務中獲得創(chuàng)新性技術(shù)突破,其提出的基于語義對抗的數(shù)據(jù)增強算法Adversarial Semantic Data Augmentation (ASDA),刷新了
2020-10-26 14:12:423344 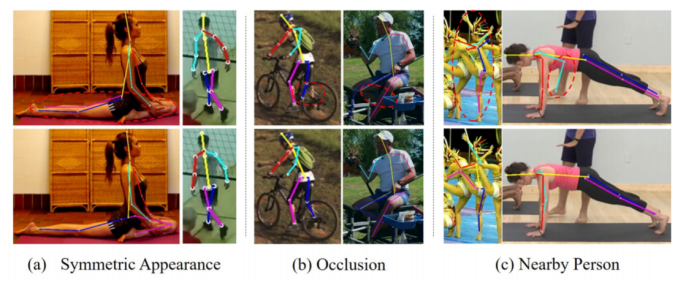
計算機仿真在逆變焊接電源中的應用綜述
2021-07-01 14:10:358 的理論知識,許多論文里面闡述的很清楚,這里就不在不在贅述。Svpwm在逆變和電機控制里面都有廣泛的應用,本文的svpwm可通過代碼生成直接運用在MCU控制器中。 一、3/2變換的及實現(xiàn)。 二、dq變換的實現(xiàn) 三、svpwm的實現(xiàn) 四、鎖相環(huán)的實現(xiàn) 五、模型總體搭建一、3/2變換的實現(xiàn)使用.
2021-11-08 14:36:0230 不一致,導致了試樣的彎曲。骨在電場作用下的變形響應直接反映了其在電場中的極化特征。以上得到的結(jié)論不僅加深了對骨力電性質(zhì)的理解,對于骨科病癥的治療和康復也具有一定的參考意義。探索骨的(逆)力電性質(zhì),最終目的在于解釋
2023-02-20 17:17:002009 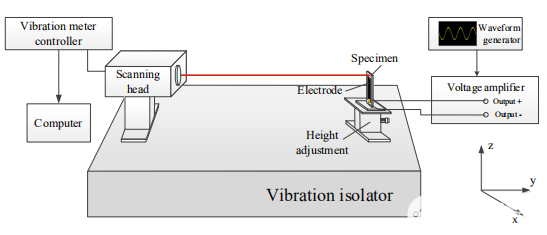
利用opencv+openpose實現(xiàn),接著我又開始找一些資料,在pycharm上部署。 前言 人體姿態(tài)估計的一個有趣應用是 CGI(computer graphic image,一種電影制造技術(shù))應用。如果
2023-06-26 10:15:044125 
隨著生成式AI在大眾工作生活的初步覆蓋,人們愈發(fā)認識到它在數(shù)字內(nèi)容創(chuàng)作中擁有的巨大潛力,但不少業(yè)內(nèi)人士也發(fā)現(xiàn)了生成式AI存在的一些不足。譬如,僅依賴文字描述AI難以生成符合用戶預期的人體姿態(tài),尤其是
2023-07-20 09:20:062146 DCDC電源模塊在光伏逆變中的應用? 光伏逆變是將光能轉(zhuǎn)換為電能的過程,光能轉(zhuǎn)換為直流電后,需要經(jīng)過光伏逆變器將直流電轉(zhuǎn)換為交流電。在光伏逆變器中,DC-DC電源模塊是一個至關(guān)重要的組件,它可以實現(xiàn)
2023-12-12 14:38:012281 路的工作原理 逆變電路通過使用逆變器來實現(xiàn)將直流電轉(zhuǎn)換為交流電的功能。逆變器是逆變電路的核心部件,其工作原理通常基于開關(guān)管的開關(guān)操作,通過改變開關(guān)管的導通與關(guān)斷狀態(tài)來改變輸出電壓的波形。 在逆變電路中,使用開關(guān)
2024-04-08 18:20:017290 人體姿態(tài)識別是計算機視覺領(lǐng)域中的重要問題之一,具有廣泛的應用前景,如智能安防、虛擬現(xiàn)實、醫(yī)療輔助等。毫米波雷達技術(shù)作為一種無需直接接觸目標就能實現(xiàn)高精度探測的感知技術(shù),在人體姿態(tài)識別領(lǐng)域具有獨特
2024-04-24 15:20:151621 逆變電路實現(xiàn)降壓的原理主要基于電力電子器件的開關(guān)特性和控制策略。
2024-05-29 16:01:031987 引言 逆變電路是一種將直流電能轉(zhuǎn)換為交流電能的電力電子裝置,廣泛應用于電力系統(tǒng)、工業(yè)自動化、新能源發(fā)電等領(lǐng)域。然而,逆變電路在工作過程中存在一些問題,如輸出波形失真、電磁干擾、效率低等,這些
2024-07-05 11:21:513481 電路中的儲能元件(如電容器、電感器等)來實現(xiàn)能量的轉(zhuǎn)換。無源逆變技術(shù)在電力電子領(lǐng)域具有廣泛的應用,如太陽能發(fā)電、風力發(fā)電、電動汽車等領(lǐng)域。 1.2 無源逆變與有源逆變的區(qū)別 有源逆變是指在直流電能轉(zhuǎn)換為交流電能的過程中,需要外
2024-08-02 17:14:112522 電子發(fā)燒友網(wǎng)站提供《基于機器學習的IWR6843AOP跌倒和姿態(tài)檢測實現(xiàn).pdf》資料免費下載
2024-09-03 10:02:093 在科技行業(yè)的激烈競爭中,AMD再次展現(xiàn)了其強大的逆襲能力。據(jù)最新媒體報道,AMD的數(shù)據(jù)中心業(yè)務在2024年第三季度實現(xiàn)了歷史性突破,營收首次超越了長期占據(jù)市場領(lǐng)導地位的Intel。
2024-11-12 14:35:161048 SiC-MOSFET單管及碳化硅模塊在逆變焊機中的應用
2024-12-30 15:23:1613 近日,中軟國際成功中標某全國性股份制銀行2025年大模型算力擴容項目,標志著中軟國際在大型銀行AI項目領(lǐng)域實現(xiàn)重大突破,進一步鞏固了其在金融科技領(lǐng)域的領(lǐng)先地位。
2025-05-06 11:46:06926 
中,其局限性日益凸顯。無線傾角傳感器的出現(xiàn),為解決這些問題提供了更靈活、高效且經(jīng)濟的方案。無線傾角傳感器的核心價值,在于其能夠在不依賴物理線纜的前提下,持續(xù)、穩(wěn)定
2025-09-22 11:31:50829 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論