近年來“自動(dòng)駕駛”被人們廣泛提及,大量汽車行業(yè)主體、互聯(lián)網(wǎng)領(lǐng)域公司、精英創(chuàng)業(yè)人群以及資本紛紛投入到該領(lǐng)域的探索中來,自動(dòng)駕駛技術(shù)是什么?離我們還有多遠(yuǎn)?顛覆性的行業(yè)變革是否已經(jīng)到來?
2018-08-13 08:34:00 7938
7938 現(xiàn)代自動(dòng)駕駛系統(tǒng)的特點(diǎn)是按順序排列的模塊化任務(wù),傳統(tǒng)的方法是基于標(biāo)準(zhǔn)的感知-規(guī)劃-控制這種序列式架構(gòu)的主流處理方式。即首先將感知信息處理成人類可以理解的語義信息和道路交通信息,然后基于常態(tài)化知識(shí)
2023-12-28 09:56:282026 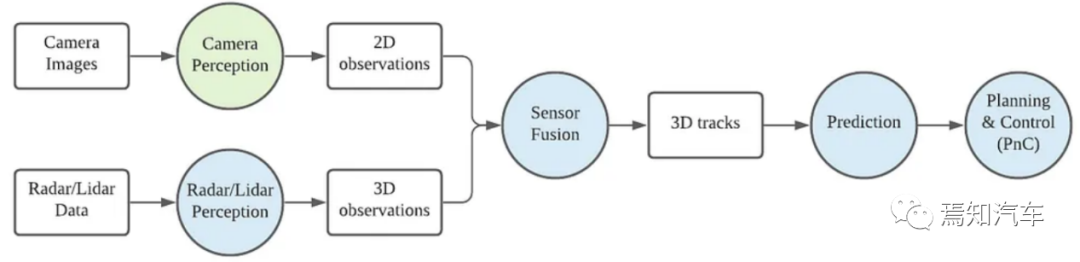
自動(dòng)駕駛的四大技術(shù)路線 ? 在自動(dòng)駕駛領(lǐng)域,發(fā)展感知層面是目前的首要目標(biāo)。自動(dòng)駕駛功能的最終實(shí)現(xiàn),是由傳感器、控制器、執(zhí)行器相互配合完成的。通過傳感器獲取車輛周圍的環(huán)境信息,交由控制器進(jìn)行行為判斷,再通過執(zhí)行器執(zhí)行判斷指
2022-03-16 07:23:006145 電子發(fā)燒友網(wǎng)報(bào)道(文/李彎彎)自動(dòng)駕駛實(shí)現(xiàn)的過程,簡單的來說是從感知、決策到執(zhí)行,感知即通過各種傳感器,采集車輛本身及外部的信息,決策即汽車的計(jì)算單元,根據(jù)特定的算法,對上述獲取的信息進(jìn)行分析,做出
2022-07-25 08:00:005197 安裝MATLAB2017A后發(fā)現(xiàn)找不到自動(dòng)駕駛工具箱是什么原因
2017-06-07 12:37:23
初創(chuàng)公司進(jìn)入自動(dòng)駕駛市場的一個(gè)門檻較低的入口。攝像頭:車載攝像頭是最基本常見的傳感器,價(jià)格低廉且應(yīng)用廣泛同時(shí)具備雷達(dá)無法完成的圖像識(shí)別功能,不僅可以識(shí)別路牌,在自動(dòng)駕駛系統(tǒng)的圖像處理方案中也是不可或缺
2017-09-06 11:36:58
Geiger 的研究主要集中在用于自動(dòng)駕駛系統(tǒng)的三維視覺理解、分割、重建、材質(zhì)與動(dòng)作估計(jì)等方面。他主導(dǎo)了自動(dòng)駕駛領(lǐng)域著名數(shù)據(jù)集 KITTI 及多項(xiàng)自動(dòng)駕駛計(jì)算機(jī)視覺任務(wù)的基準(zhǔn)體系建設(shè),KITTI 是目前最大的用于自動(dòng)駕駛的計(jì)算機(jī)視覺公開數(shù)據(jù)集。
2020-07-30 06:49:20
作者:余貴珍、周彬、王陽、周亦威、白宇目錄第一章 自動(dòng)駕駛系統(tǒng)概述1.1 自動(dòng)駕駛系統(tǒng)架構(gòu)1.1.1 自動(dòng)駕駛系統(tǒng)的三個(gè)層級(jí)1.1.2 自動(dòng)駕駛系統(tǒng)的基本技術(shù)架構(gòu)1.2 自動(dòng)駕駛技術(shù)國內(nèi)外發(fā)展1.3
2021-08-30 08:36:23
自動(dòng)駕駛AI芯片到位了么?
2020-12-04 06:13:55
什么叫自動(dòng)駕駛?
2020-07-31 06:53:59
預(yù)測,有很大的不確定性,而且是在所有人都采取自動(dòng)駕駛的前提下得出的。就安全系數(shù)而言,傳感和決策對其意義重大,所以解讀傳感器信息為當(dāng)前高級(jí)駕駛輔助系統(tǒng)(ADAS)的核心,以及未來全自動(dòng)駕駛汽車所需
2018-10-30 11:51:34
,那肯定不是一輛好開的自動(dòng)駕駛汽車。但如果你有很棒的人工智能和控制系統(tǒng),但配的傳感器很糟糕的話,同樣還是會(huì)碰到問題,因?yàn)槿绻麄鞲衅鞑混`的話,汽車就沒辦法感知所處的周遭環(huán)境,繼而撞上附近的物體。
2020-07-29 06:35:50
的帶寬有了更高的要求。從而使用以太網(wǎng)技術(shù)及中央域控制(Domain)和區(qū)域控制(Zonal)架構(gòu)是下一代車載網(wǎng)絡(luò)的發(fā)展方向。然而對于自動(dòng)駕駛技術(shù)的實(shí)現(xiàn),涉及到感知、規(guī)劃、執(zhí)行三個(gè)層面。由于車輛行...
2021-09-03 08:31:28
特斯拉在五月份發(fā)生的自動(dòng)駕駛事故,和最近在Defcon上演示的如何干擾傳感器,都充分說明了傳感器在自動(dòng)駕駛中的重要性:環(huán)境感知是自動(dòng)駕駛實(shí)現(xiàn)的基礎(chǔ),如果不能正確地感知周圍環(huán)境,那么接下來的認(rèn)知、決策與控制,都是空中樓臺(tái)。
2020-05-14 07:34:45
功能;但作為一個(gè)行業(yè),我們僅僅是才觸及ADAS系統(tǒng)的表面,更不用說完全自主駕駛了。示意圖:自動(dòng)駕駛的五個(gè)級(jí)別自動(dòng)駕駛的級(jí)別
2019-08-07 07:13:15
的攻擊方式有幾種,一是攻擊自動(dòng)駕駛的外部傳感器,科恩實(shí)驗(yàn)室對于特斯拉的模擬攻擊實(shí)驗(yàn)是一個(gè)很好的例子。在這方面,使用多傳感器融合,綜合決策,而不是只依賴某個(gè)傳感器,是較好的解決辦法。另外,在傳感器中加入抗
2017-06-08 15:25:32
沒有贏家的困境。除非我們能避免其發(fā)生。這正是自動(dòng)駕駛的主要目標(biāo)之一:車輛中的傳感器、通信能力、執(zhí)行器和人工智能(AI)協(xié)同工作,收集并分析信息,從而比最好的人類司機(jī)更快、更及時(shí)地作出決策。擴(kuò)展感知
2018-10-26 11:25:01
技術(shù)本身是死亡事件的主要原因。 她向新浪科技解釋稱,特斯拉在對外宣傳上也是表明其并不是完全獨(dú)立自主的自動(dòng)駕駛系統(tǒng)。但對于用戶而言,當(dāng)特斯拉將這個(gè)功能開放出來后,用戶在使用了一段時(shí)間后容易形成依賴感
2016-07-21 09:00:38
:自動(dòng)駕駛系統(tǒng):量產(chǎn)導(dǎo)向還是性能導(dǎo)向, 自動(dòng)駕駛系列報(bào)告三:車載芯片篇,自動(dòng)駕駛芯片,GPU的現(xiàn)在和ASIC的未來, 自動(dòng)駕駛系列報(bào)告之四:傳感器篇,多傳感器融合自動(dòng)駕駛系列報(bào)告之五:控制執(zhí)行篇,轉(zhuǎn)向制動(dòng)電子需要報(bào)告的關(guān)注微信公眾號(hào):AI汽車人回復(fù)“自動(dòng)駕駛報(bào)告”領(lǐng)取`
2019-08-09 17:14:24
與自駕儀、電機(jī)控制器MCU、電池管理系統(tǒng)BMS、線控轉(zhuǎn)向、線控制動(dòng)、線控?zé)艄獾?b class="flag-6" style="color: red">系統(tǒng)進(jìn)行信息交互,通過對接收到的信息的處理,判斷各個(gè)子控制單元和整車系統(tǒng)的狀態(tài),做出合理、安全的指令,從而讓各個(gè)子控制單元協(xié)調(diào)、安全的工作,實(shí)現(xiàn)自動(dòng)駕駛電動(dòng)車系統(tǒng)的功能。通常整車控制器將需要采集整車檔位信號(hào),油門踏板...
2021-09-07 06:30:56
自動(dòng)駕駛車輛中采用的AI算法自動(dòng)駕駛車輛中AI面臨的挑戰(zhàn)
2021-02-22 06:39:55
、路、云端等智能信息交換、共享,具備復(fù)雜環(huán)境感知、智能決策、協(xié)同控制等功能,可實(shí)現(xiàn)安全、高效、舒適、節(jié)能行駛,并最終可實(shí)現(xiàn)替代人來操作的新一代汽車。 高級(jí)駕駛輔助系統(tǒng)是實(shí)現(xiàn)自動(dòng)駕駛的重要基礎(chǔ),本文就駕駛輔助技術(shù)的一些常見功能進(jìn)行介紹。
2020-08-14 07:08:52
由南德意志出版及活動(dòng)有限公司舉辦的 國際AI自動(dòng)駕駛高峰論壇 將于 2017年11月28/29日 在 德國慕尼黑 舉辦,中德聯(lián)合股份公司作為中國獨(dú)家合作伙伴,誠邀您撥冗蒞臨!【活動(dòng)背景】AI
2017-09-13 13:59:54
對實(shí)時(shí)性要求極高,任何延遲都可能導(dǎo)致安全事故。FPGA的硬件特性使得其能夠?qū)崿F(xiàn)極低的延遲,確保自動(dòng)駕駛系統(tǒng)能夠?qū)崟r(shí)響應(yīng)環(huán)境變化并做出正確的決策。
高能效比:
盡管FPGA的功耗相對于一些專用處理器可能
2024-07-29 17:11:14
數(shù)據(jù)的實(shí)時(shí)處理和反饋,為自動(dòng)駕駛汽車的決策提供實(shí)時(shí)、準(zhǔn)確的數(shù)據(jù)支持。
三、控制系統(tǒng)優(yōu)化自動(dòng)駕駛汽車的控制系統(tǒng)是復(fù)雜的,需要實(shí)現(xiàn)對車速、轉(zhuǎn)向、剎車等多種信息的實(shí)時(shí)控制。FPGA可以提供高速的控制邏輯,并
2024-07-29 17:09:16
LabVIEW開發(fā)自動(dòng)駕駛的雙目測距系統(tǒng)
隨著車輛駕駛技術(shù)的不斷發(fā)展,自動(dòng)駕駛技術(shù)正日益成為現(xiàn)實(shí)。從L2級(jí)別的輔助駕駛技術(shù)到L3級(jí)別的受條件約束的自動(dòng)駕駛技術(shù),車輛安全性和智能化水平正在不斷提升
2023-12-19 18:02:07
3萬美元以上,相當(dāng)于一輛中級(jí)車的價(jià)格。自動(dòng)駕駛四大核心技術(shù)分別為環(huán)境感知、高精度定位、路徑規(guī)劃、控制執(zhí)行。其中環(huán)境感知技術(shù)是最基礎(chǔ)、最重要的一環(huán)。通過環(huán)境感知,可實(shí)時(shí)、可靠且準(zhǔn)確地識(shí)別出車輛行駛路徑
2018-12-14 17:30:15
的價(jià)格。自動(dòng)駕駛四大核心技術(shù)分別為環(huán)境感知、高精度定位、路徑規(guī)劃、控制執(zhí)行。其中環(huán)境感知技術(shù)是最基礎(chǔ)、最重要的一環(huán)。通過環(huán)境感知,可實(shí)時(shí)、可靠且準(zhǔn)確地識(shí)別出車輛行駛路徑周邊對其安全行駛可能存在隱患的物體
2020-11-18 14:15:16
自動(dòng)駕駛的實(shí)現(xiàn)高度依賴環(huán)境感知、控制執(zhí)行、高精度定位、路徑規(guī)劃等方面的核心技術(shù)。其中通過環(huán)境感知,實(shí)時(shí)準(zhǔn)確地識(shí)別出車輛行駛路徑周邊對其安全行駛可能存在隱患的物體,為車輛的控制執(zhí)行提供可靠信息源;通過
2020-10-26 16:41:56
是一種模型,旨在同時(shí)執(zhí)行自動(dòng)駕駛場景中的不同任務(wù),同時(shí)實(shí)現(xiàn)優(yōu)異的性能和效率。這些任務(wù)包括對象檢測、分割、車道檢測、可行駛區(qū)域分割和深度估算,這些都是自動(dòng)駕駛感知模塊的重要組成部分。
三、代碼實(shí)現(xiàn)
2023-09-26 16:43:01
`特斯拉首起自動(dòng)駕駛致命車禍,自動(dòng)駕駛的冬天來了?“一個(gè)致命的事故一定是由多個(gè)小的錯(cuò)誤組成的。” 7月初,特斯拉發(fā)表博客敘述了NHTSA(美國國家公路交通安全管理局)正在著手調(diào)查第一起Tesla
2016-07-05 11:14:19
為什么視覺系統(tǒng)對自動(dòng)駕駛至關(guān)重要?
2020-12-29 06:43:48
的基本原理,需了解三大關(guān)鍵詞:傳感器、數(shù)據(jù)融合(Data Fusion)、100%安全性決策。傳感器自動(dòng)駕駛需要的傳感器系統(tǒng)主要有三種類型:攝像頭、雷達(dá)和激光雷達(dá)。?攝像頭攝像頭是自動(dòng)駕駛必備的傳感器
2020-06-08 07:00:00
的次數(shù)(圖1)。2019年的數(shù)據(jù)尚未匯總,但個(gè)別公司的報(bào)告可在網(wǎng)上查閱。圖1. 五大自動(dòng)駕駛制造商在加州的測試數(shù)據(jù):每次脫離人為接管后自動(dòng)駕駛系統(tǒng)的平均行駛英里數(shù)(2017年12月至2018年10月
2020-06-16 18:53:55
,即可快速、無縫地將激光雷達(dá)感知模塊嵌入到自己的無人駕駛方案中,真正實(shí)現(xiàn)“一鍵獲得自動(dòng)駕駛激光雷達(dá)環(huán)境感知能力”。RS-BoxLiDAR感知算法專業(yè)硬件平臺(tái)RS-Box 由嵌入式硬件平臺(tái)、獨(dú)立操作系統(tǒng)
2017-12-15 14:20:48
基于視覺的slam自動(dòng)駕駛,這是我們測試的視頻《基于slam算法的智能機(jī)器人》調(diào)研分析報(bào)告項(xiàng)目背景分析機(jī)器人曾經(jīng)是科幻電影中的形象,可目前已經(jīng)漸漸走入我們的生活。機(jī)器人技術(shù)以包含機(jī)械、電子、自動(dòng)
2021-08-09 09:37:34
從安全的角度看自動(dòng)駕駛
2021-01-25 06:42:46
自動(dòng)駕駛技術(shù)為人們勾勒出了一副美好的未來出行的畫面:坐上沒有方向盤的汽車,一覺睡到公司門口;甚至我們可能不再擁有一輛汽車,需要出門時(shí)共享自動(dòng)駕駛汽車會(huì)自己到來,送到目的地時(shí)會(huì)自行離開……不過自動(dòng)駕駛
2020-10-22 07:45:38
是讓交通出行更安全,比如自動(dòng)駕駛的智能感知車距功能可以提高道路使用效率,降低人為操作失誤,有利于道路通暢。從看到緊急情況到剎車發(fā)揮作用,自動(dòng)駕駛比人的反應(yīng)更快。同時(shí),也不會(huì)出現(xiàn)疲勞駕駛、酒駕醉駕和開車
2019-05-13 00:26:37
焦點(diǎn)是否落在目標(biāo)物體上。某自動(dòng)駕駛公司借此發(fā)現(xiàn)模型在夜間過度關(guān)注路燈而非行人。
? 實(shí)時(shí)性保障: ?時(shí)間感知測試框架(TAF)注入時(shí)間戳探針,監(jiān)控函數(shù)執(zhí)行耗時(shí)。例如,某路徑規(guī)劃算法因內(nèi)存泄漏導(dǎo)致響應(yīng)
2025-05-12 15:59:07
未來,自動(dòng)駕駛將不再是科幻電影里的橋段,這是未來汽車的一個(gè)趨勢,感知是自動(dòng)駕駛的重要組成部分,同時(shí)安全性至關(guān)重要。作為全球第7大汽車半導(dǎo)體供應(yīng)商,安森美半導(dǎo)體提供全面的智能感知方案,包括圖像傳感器
2019-07-31 07:11:30
駕駛的關(guān)鍵的是具備人類的感知能力,多傳感器融合感知正是自動(dòng)駕駛破局的關(guān)鍵。昱感微的雷視一體多傳感器融合方案就好像一雙比人眼更敏銳的眼睛,可以為自動(dòng)駕駛系統(tǒng)提供更豐富更精準(zhǔn)的視覺語言——目標(biāo)與環(huán)境的多
2024-04-11 10:26:51
L2.5 和 L4 級(jí)別 自動(dòng)駕駛汽車滲透率分別將達(dá) 70%和 18%。從產(chǎn)業(yè)鏈上看,僅上游(感知層、傳輸層、決策層、執(zhí)行層)和中游平臺(tái)層,到 2025 年新增市場空間達(dá) 3088 億元,2030 年
2021-08-27 07:21:36
請問各位老鳥我是新手汽車自動(dòng)駕駛技術(shù)是怎么回事,是用什么板子開發(fā)的需要應(yīng)用哪些技術(shù)和知識(shí)。提問題提得不是很好請各位見諒
2016-04-14 20:44:03
輔助系統(tǒng)系統(tǒng))用到的技術(shù)重迭。自駕車如何看見世界為什么要這么多種傳感器?優(yōu)缺點(diǎn)互補(bǔ)目前多數(shù)車商在量產(chǎn)車中配備的“自動(dòng)駕駛”功能,包含特斯拉、Volvo、Mercedes-Benz、奧迪等,事實(shí)上就是搭載
2017-05-15 17:49:20
、其他車輛等的感知信息進(jìn)行共享,通信技術(shù)可以幫助自動(dòng)駕駛車輛獲得全方位的道路交通信息,做出最有利的行駛規(guī)劃和決策,降低車輛行駛能耗,這一點(diǎn)在車輛編隊(duì)行駛中顯得尤為突出。在自動(dòng)車輛編隊(duì)行駛業(yè)務(wù)中
2021-01-12 15:42:00
隨著時(shí)代的演進(jìn)與汽車工業(yè)技術(shù)、機(jī)器視覺系統(tǒng)、人工智能和傳感器相關(guān)技術(shù)上不斷創(chuàng)新與進(jìn)步,無人自動(dòng)駕駛汽車已不是一件遙不可及的夢想,Google與國際車廠相繼針對自動(dòng)駕駛技術(shù)致力研究開發(fā),進(jìn)一步讓
2020-08-26 06:45:07
為什么視覺系統(tǒng)對自動(dòng)駕駛至關(guān)重要?
2021-01-25 07:51:32
軟件中,針對面向服務(wù)架構(gòu)SOA開發(fā)需要使用高性能的處理器,自適應(yīng)汽車開放系統(tǒng)架構(gòu)AP Autosar有著不可比擬的優(yōu)勢。 而應(yīng)用軟件中,自動(dòng)駕駛整體架構(gòu)主要涉及感知、規(guī)劃、決策、控制等節(jié)點(diǎn)。通過
2022-11-09 16:09:04
看到新聞報(bào)道說谷歌自動(dòng)駕駛汽車已經(jīng)行駛近30萬公里了,非常的強(qiáng)大~~上次參加了重慶新能源汽車峰會(huì),對會(huì)上富士通半導(dǎo)體宣講的一款全景視頻汽車實(shí)時(shí)監(jiān)控技術(shù)平臺(tái)似乎看到了自動(dòng)駕駛的影子(利用MB86R11
2011-06-14 16:15:27
車聯(lián)網(wǎng)與智能駕駛車聯(lián)網(wǎng)和自動(dòng)駕駛密切相關(guān),很大程度上可以理解為是對自動(dòng)駕駛高階版本的增強(qiáng)和補(bǔ)充,通過車與車、車與人、車與交通基礎(chǔ)設(shè)施、車與網(wǎng)絡(luò)的互聯(lián)互通,讓對環(huán)境已經(jīng)具備感知能力的自動(dòng)駕駛汽車,再
2019-03-19 06:20:10
自動(dòng)駕駛汽車的夢想正在成為現(xiàn)實(shí)。通過在車輛中實(shí)現(xiàn)多種先進(jìn)的駕駛員輔助系統(tǒng)(ADAS),汽車行業(yè)對于完全自動(dòng)駕駛的追求正在穩(wěn)步推進(jìn)。如今,幾乎所有汽車經(jīng)銷商的新款車都配備了多個(gè)攝像頭、雷達(dá)和超聲波傳感器,可實(shí)現(xiàn)如輔助自動(dòng)泊車、自動(dòng)緊急制動(dòng)、車道輔助行駛、司機(jī)疲勞駕駛警報(bào)等基于感知的各項(xiàng)功能。
2019-07-29 08:26:19
“智慧” 有效執(zhí)行,可以實(shí)施主動(dòng)控制,并能夠進(jìn)行人機(jī)交互與協(xié)同。自動(dòng)駕駛是“智慧”和“能力” 的有機(jī)結(jié)合,二者相輔相成,缺一不可。為實(shí)現(xiàn)“智慧”和“能力”,自動(dòng)駕駛技術(shù)一般包括環(huán)境感知、決策規(guī)劃和車輛
2020-07-21 14:12:56
而言,我們關(guān)注的是自動(dòng)駕駛汽車的技術(shù)可行性。如今,我們對防抱死制動(dòng)系統(tǒng) (ABS) 及安全氣囊等被動(dòng)安全系統(tǒng),或者電動(dòng)助力轉(zhuǎn)向系統(tǒng)與電子發(fā)動(dòng)機(jī)管理都已習(xí)以為常了。這些系統(tǒng)能使汽車采取行動(dòng)(制動(dòng)、轉(zhuǎn)向
2018-09-14 11:03:54
交通環(huán)境的建模與仿真,覆蓋從道路網(wǎng)絡(luò)設(shè)計(jì)、動(dòng)態(tài)場景配置到多傳感器仿真的全流程,支持自動(dòng)駕駛系統(tǒng)在模型在環(huán)(MiL)軟件在環(huán)(SiL)、硬件在環(huán)(HiL)、駕駛員在環(huán)
2025-04-28 12:09:40
自動(dòng)駕駛會(huì)影響人們的傳統(tǒng)駕駛倫理觀,而且還會(huì)創(chuàng)造出新的駕駛倫理觀念,因此對自動(dòng)駕駛的倫理決策制定基本框架是具有前瞻性的。
2018-09-17 08:54:426581 自動(dòng)駕駛是一種類人駕駛,即計(jì)算機(jī)模擬人類的駕駛行為,其功能的實(shí)現(xiàn)同樣分為感知、理解、決策和執(zhí)行四個(gè)層次。由各類傳感器、ECU和執(zhí)行器來實(shí)現(xiàn)。
2018-11-13 16:58:574755 當(dāng)使用自動(dòng)駕駛車輛的時(shí)候,核心的三個(gè)問題:在哪里?去哪里?如何去?定位系統(tǒng)在自動(dòng)駕駛中專注于解決“在哪里?”這個(gè)問題。自動(dòng)駕駛的核心內(nèi)涵包括定位、感知、決策、執(zhí)行四個(gè)部分,其中定位是決策和執(zhí)行的前提,是自動(dòng)駕駛中必不可少的關(guān)鍵環(huán)節(jié)。
2018-12-12 10:31:005803 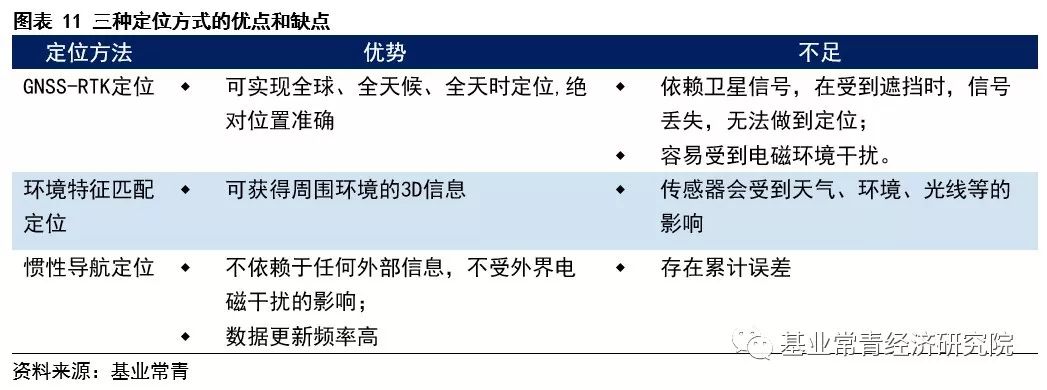
目前,高級(jí)別自動(dòng)駕駛解決方案基本采用“感知-決策-執(zhí)行”鏈條。
2019-06-18 10:47:434015 自動(dòng)駕駛系統(tǒng)的設(shè)計(jì)思路是建立若干個(gè)行駛狀態(tài),通過不同的條件觸發(fā)行駛狀態(tài)切換。這種設(shè)計(jì)思路存在切換過程平順性較差問題。
2019-08-05 17:18:561429 ,自動(dòng)駕駛汽車也需要即時(shí)決策的能力。 目前,大多數(shù)自動(dòng)駕駛汽車依靠多個(gè)傳感器感知世界,大多數(shù)系統(tǒng)使用攝像頭、雷達(dá)傳感器和激光雷達(dá)傳感器組合,車載計(jì)算機(jī)將這些數(shù)據(jù)融合在一起,形成對汽車周圍情況的全面了解。沒有這些
2021-02-05 12:27:082451 
自動(dòng)駕駛包括感知、判斷和執(zhí)行,而感知是整個(gè)過程的源頭,是自動(dòng)駕駛系統(tǒng)的重要模塊。在車輛行車過程中,感知系統(tǒng)會(huì)通過傳感器實(shí)時(shí)采集周邊環(huán)境的信息,相當(dāng)于自動(dòng)駕駛汽車的「眼睛」,可以幫助汽車實(shí)現(xiàn)類似于人類駕駛員一樣效果的觀察能力。
2022-04-06 16:03:265194 自動(dòng)駕駛汽車,即可以根據(jù)乘客計(jì)劃自主完成出行任務(wù)的汽車,在整個(gè)出行過程中,完全不需要駕駛員的參與和控制。自動(dòng)駕駛汽車想要完成出行安排,離不開感知、決策、控制這三大要素,其中感知作為讓汽車“認(rèn)得路
2022-07-18 08:38:482437 自動(dòng)駕駛是一個(gè)非常復(fù)雜的系統(tǒng)工程,涉及感知、規(guī)劃、決策與執(zhí)行等環(huán)節(jié),也與政策法規(guī)、成本制約緊密相關(guān)。
2022-07-24 14:50:001124 自動(dòng)駕駛是集感知、決策、控制于一體,充分考慮車輛與交通環(huán)境協(xié)調(diào)規(guī)劃的系統(tǒng),也是未來智能交通系統(tǒng)的重要組成部分。正如人走路需要知道路況、了解方向、及時(shí)避讓障礙物,并走到目的地一樣,感知、決策、控制對于
2022-08-08 08:36:292101 在自動(dòng)駕駛賽道中,感知的目的是為了模仿人眼采集相關(guān)信息,為后續(xù)做決策提供必要的信息。根據(jù)所做決策的任務(wù)不同,感知可以包括很多子任務(wù):如車道線檢測、3D目標(biāo)檢測、障礙物檢測、紅綠燈檢測等等;再根據(jù)感知預(yù)測出的結(jié)果,完成決策;最后根據(jù)決策結(jié)果執(zhí)行相應(yīng)的操作(如變道、超車等);
2022-10-09 17:54:231871 自動(dòng)駕駛主系統(tǒng)安全是軟硬件組合套件的安全設(shè)計(jì)。軟件算法是整個(gè)自動(dòng)駕駛系統(tǒng)的核心, 典型的 L4 級(jí)自動(dòng)駕駛算法系統(tǒng)架構(gòu)主要包括車載操作系統(tǒng)、 環(huán)境感知、 高精地圖與定位、 預(yù)測決策與規(guī)劃、 控制與執(zhí)行模塊等。
2022-10-26 09:13:492106 控制就像是人的手和腳一樣,對具體的出行動(dòng)作進(jìn)行控制執(zhí)行,讓自動(dòng)駕駛汽車可以完成出行過程,控制系統(tǒng)可以完成車輛的轉(zhuǎn)彎、加速、燈光控制等一系列動(dòng)作,是實(shí)現(xiàn)自動(dòng)駕駛落地的最后一步。
2022-11-10 18:05:02745 自動(dòng)駕駛的發(fā)展離不開感知系統(tǒng)、決策控制系統(tǒng)、執(zhí)行系統(tǒng)這三大系統(tǒng),其中感知系統(tǒng)主要通過攝像頭、毫米波雷達(dá)、激光雷達(dá)、超聲波雷達(dá)等感知硬件來承擔(dān)自動(dòng)駕駛汽車“看”的任務(wù);決策控制系統(tǒng)則是將感知系統(tǒng)“看
2022-11-14 08:42:242100 。自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)需要依賴于感知系統(tǒng)、決策系統(tǒng)和控制系統(tǒng)的協(xié)同工作,其中,自動(dòng)駕駛感知系統(tǒng)是非常最重要的一環(huán),承擔(dān)著讓自動(dòng)駕駛汽車看得清的任務(wù),其研究和發(fā)展將影響自動(dòng)駕駛汽車落地進(jìn)展。自動(dòng)駕駛技術(shù)是一項(xiàng)涉
2023-02-20 08:53:251428 自動(dòng)駕駛技術(shù)是一項(xiàng)涉及多學(xué)科的復(fù)雜技術(shù),其中感知系統(tǒng)是至關(guān)重要的一部分。感知系統(tǒng)主要用于實(shí)現(xiàn)對車輛周圍環(huán)境的感知,從而為車輛提供精準(zhǔn)的環(huán)境信息,以便進(jìn)行決策和控制。
2023-03-07 09:25:084909 隨著人工智能技術(shù)的發(fā)展與高級(jí)輔助駕駛系統(tǒng)的普及,自動(dòng)駕駛汽車雛形已經(jīng)初現(xiàn),自動(dòng)駕駛汽車得以實(shí)現(xiàn)離不開感知系統(tǒng)、決策系統(tǒng)和控制系統(tǒng),三大系統(tǒng)讓自動(dòng)駕駛汽車“看”得清、“想”得快、“走”得穩(wěn)。感知系統(tǒng)
2023-04-10 08:44:192032 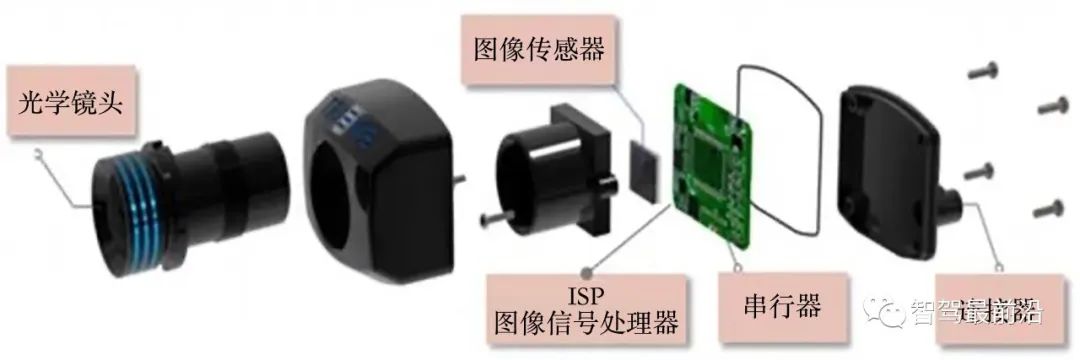
在自動(dòng)駕駛賽道中,感知的目的是為了模仿人眼采集相關(guān)信息,為后續(xù)做決策提供必要的信息。根據(jù)所做決策的任務(wù)不同,感知可以包括很多子任務(wù):如車道線檢測、3D目標(biāo)檢測、障礙物檢測、紅綠燈檢測等等;再根據(jù)感知預(yù)測出的結(jié)果,完成決策;最后根據(jù)決策結(jié)果執(zhí)行相應(yīng)的操作(如變道、超車等)
2023-05-17 10:58:181961 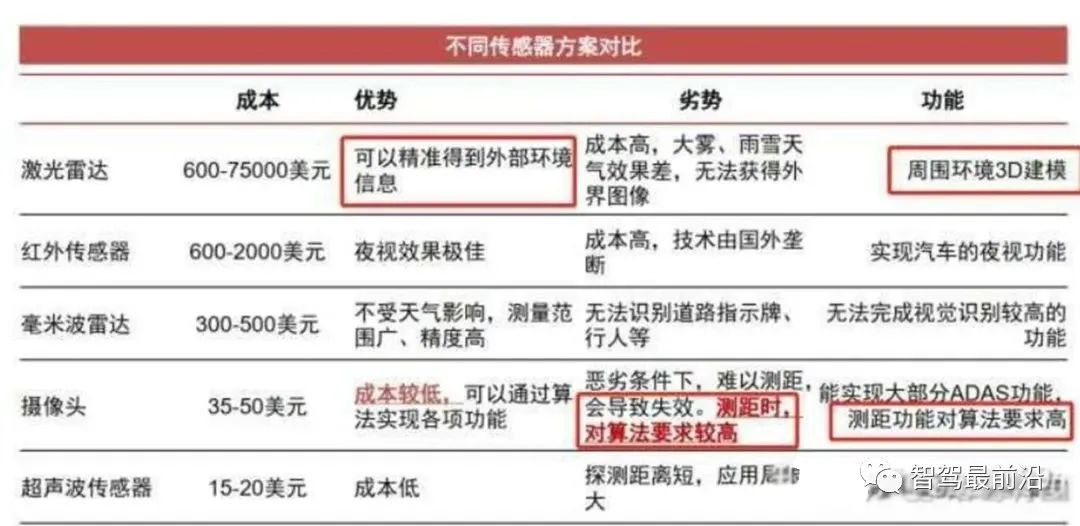
自動(dòng)駕駛汽車首先應(yīng)有一套完整的感知系統(tǒng),代替駕駛人的感知,提供周圍環(huán)境信息;其次應(yīng)有一套集智能算法、高性能硬件于一體的控制系統(tǒng),代替駕駛人的大腦,制定駕駛指令、規(guī)劃行駛路徑;最后還需一套完善縝密
2023-05-17 11:07:302369 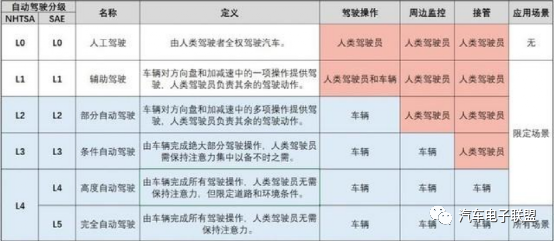
車輛自身信息與周圍環(huán)境信息,經(jīng)過處理器對采集到的數(shù)據(jù)信息進(jìn)行分析計(jì)算和處理,從而做出決策控制執(zhí)行系統(tǒng)實(shí)現(xiàn)車輛加減速和轉(zhuǎn)向等動(dòng)作。SAE將自動(dòng)駕駛分為L0-L5共6個(gè)等級(jí),L0為沒有加入自動(dòng)駕駛的傳統(tǒng)人類
2023-05-17 11:10:131835 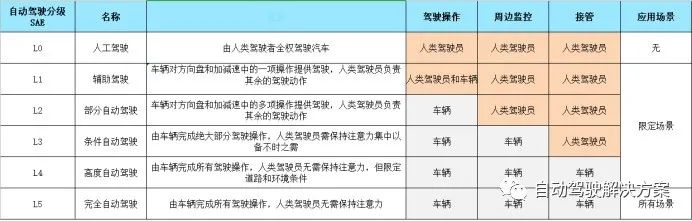
文章目錄1. 第一章行為決策在自動(dòng)駕駛系統(tǒng)架構(gòu)中的位置 2. 行為決策算法的種類 2.1 基于規(guī)則的決策算法 2.1.1 決策樹 2.1.2 有限狀態(tài)機(jī)(FSM) 2.1.3 基于本體論
2023-06-01 16:24:31 0
0 定義里有兩個(gè)關(guān)鍵詞。
首先是感知環(huán)境和導(dǎo)航,也就是說自動(dòng)駕駛汽車可以自主的采集和理解周邊環(huán)境信息,并根據(jù)設(shè)定的目的地進(jìn)行決策和行進(jìn)。
然后是需要駕駛員輔助或者完全不需操控。關(guān)于不需要駕駛員操縱,有個(gè)SAE(美國汽車工程
2023-06-01 15:24:161 在自動(dòng)駕駛整個(gè)軟件框架中,決策規(guī)劃模塊有著重要的作用。決策規(guī)劃模塊一般也叫Planning模塊,在整個(gè)自動(dòng)駕駛系統(tǒng)
中,Planning模塊相當(dāng)于人類駕駛員的大腦,它的上游是地圖、導(dǎo)航、感知、預(yù)測
2023-06-01 15:21:072 自動(dòng)駕駛系統(tǒng)是一個(gè)復(fù)雜的系統(tǒng);在無人車實(shí)際使用中,需要無人駕駛系統(tǒng)完成感知、決策、控制3大任務(wù),即:環(huán)境感知系統(tǒng)、定位導(dǎo)航系統(tǒng)、路徑規(guī)劃系統(tǒng);
1. 感知系統(tǒng): 依賴來自傳感器的大量數(shù)據(jù),進(jìn)而實(shí)現(xiàn)
2023-06-01 11:27:471 在自動(dòng)駕駛體系中,毫米波雷達(dá)是系統(tǒng)感知層不可或缺的重要硬件,能讓智能駕駛感知系統(tǒng)立體化。因?yàn)槠?b class="flag-6" style="color: red">自動(dòng)駕駛系統(tǒng)的主要邏輯層包括感知層、決策層和執(zhí)行層,而感知層是實(shí)現(xiàn)系統(tǒng)運(yùn)作的源頭基礎(chǔ)。
2023-06-01 16:56:291811 
自駕車自動(dòng)駕駛系統(tǒng)的體系結(jié)構(gòu)一般分為感知系統(tǒng)和決策系統(tǒng)。感知系統(tǒng)一般分為許多子系統(tǒng),負(fù)責(zé)自動(dòng)駕駛汽車定位、靜態(tài)
障礙物測繪、移動(dòng)障礙物檢測與跟蹤、道路測繪、交通信號(hào)檢測與識(shí)別等任務(wù)。決策系統(tǒng)通常被劃分為許多子系統(tǒng),負(fù)責(zé)諸如
路徑規(guī)劃、路徑規(guī)劃、行為選擇、運(yùn)動(dòng)規(guī)劃和控制等任務(wù)。
2023-06-02 16:11:140 自動(dòng)駕駛典型系統(tǒng)架構(gòu),包括:環(huán)境感知、決策規(guī)劃和運(yùn)動(dòng)控制三部分;
感知層:用來完成對車輛周圍環(huán)境的感知識(shí)別,主要目的:獲取并處理環(huán)境信息;汽車自動(dòng)駕駛常用傳感器主要包括:攝像頭、毫米波雷達(dá)
2023-06-06 10:35:420 自動(dòng)駕駛感知識(shí)別、決策規(guī)劃、控制執(zhí)行三個(gè)核心系統(tǒng)中,和傳統(tǒng)汽車零部件行業(yè)貼合最近的就是控制執(zhí)行端,說的再明確一
些就是驅(qū)動(dòng)控制、轉(zhuǎn)向控制、制動(dòng)控制等。自動(dòng)駕駛的路徑規(guī)劃等駕駛決策是由傳感器根據(jù)實(shí)際的道路交通情況進(jìn)行識(shí)別進(jìn)而
得出,都會(huì)是電信號(hào),這就需要傳統(tǒng)汽車的底盤進(jìn)行線控的改造而適用于自動(dòng)駕駛。
2023-06-07 14:12:480 環(huán)境感知是自動(dòng)駕駛的第一環(huán),是車輛和環(huán)境交互的紐帶。一個(gè)自動(dòng)駕駛系統(tǒng)整體表現(xiàn)的好壞,很大程度上都取決于感知系統(tǒng)的好壞。目前,環(huán)境感知技術(shù)有兩大主流技術(shù)路線
2023-07-25 10:36:391073 
、決策、執(zhí)行于一體的自主交通工具,其三點(diǎn)也是自動(dòng)駕駛落地的重要技術(shù)要素。 路況感知 ? 要完成自動(dòng)駕駛,看清道路是第一要求,類似人行走時(shí)要通過“眼睛”和“耳朵”知悉交通情況,自動(dòng)駕駛汽車通過圖為T928邊緣計(jì)算機(jī)配備的
2023-07-29 11:10:18495 
BEV自動(dòng)駕駛感知好比一個(gè)從高處統(tǒng)觀全局的“上帝視角”,將三維環(huán)境信息投影到二維平面,以俯視視角展示環(huán)境中的物體和地形。在路徑規(guī)劃、障礙物檢測、自動(dòng)駕駛決策等方面,BEV感知都展現(xiàn)出了其獨(dú)特的優(yōu)勢。
2023-08-23 14:51:071653 
規(guī)控決策在自動(dòng)駕駛領(lǐng)域的重要性不容忽視,因?yàn)樗苯佑绊懙?b class="flag-6" style="color: red">自動(dòng)駕駛技術(shù)實(shí)際應(yīng)用的成功與否。首先,規(guī)控決策對于確保自動(dòng)駕駛車輛的安全性至關(guān)重要,通過合理的規(guī)控,可以有效地降低交通事故的發(fā)生率,確保人們的生命財(cái)產(chǎn)安全。
2023-10-19 09:37:371426 
Automobile,IARA)為例,提出了自動(dòng)駕駛汽車的自動(dòng)駕駛系統(tǒng)的典型架構(gòu)。 自動(dòng)駕駛系統(tǒng)主要由感知系統(tǒng)(Perception System)和規(guī)劃決策系統(tǒng)(Decision Making System)組成
2023-11-10 17:30:151506 隨著人工智能技術(shù)的飛速發(fā)展,自動(dòng)駕駛技術(shù)作為其中的重要分支,正逐漸走向成熟。在自動(dòng)駕駛系統(tǒng)中,深度學(xué)習(xí)技術(shù)發(fā)揮著至關(guān)重要的作用。它通過模擬人腦的學(xué)習(xí)過程,實(shí)現(xiàn)對車輛周圍環(huán)境的感知、理解和決策。本文將深入探討深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù),包括感知與識(shí)別、決策與規(guī)劃以及控制與執(zhí)行等方面。
2024-07-01 11:40:171716 自動(dòng)駕駛飛速發(fā)展,繞不開感知、決策和控制決策的經(jīng)典框架,而感知作為自動(dòng)駕駛汽車“感官”的重要組成部分,決定了自動(dòng)駕駛系統(tǒng)對環(huán)境的理解和反應(yīng)能力。為了讓自動(dòng)駕駛汽車“感官”更強(qiáng),需要在車輛上加裝必要
2024-08-23 10:18:411608 感知的定義及原理 在聊這個(gè)話題之前,我們先聊一聊感知是什么,自動(dòng)駕駛感知系統(tǒng)就是一個(gè)把外界變成機(jī)器可用信息的工程流水線。感知系統(tǒng)的輸入主要依靠如攝像頭(可見光、近紅外)、激光雷達(dá)(LiDAR)、毫米波雷達(dá)(RADAR)、超聲
2025-08-23 15:06:141510 
自動(dòng)駕駛的感知、決策與控制是一個(gè)高度耦合的系統(tǒng)工程。感知負(fù)責(zé)把復(fù)雜、噪聲且有不確定性的外界信息轉(zhuǎn)換為具有語義和概率描述的內(nèi)部狀態(tài);決策基于這些狀態(tài)做出策略選擇,并生成滿足動(dòng)力學(xué)和安全約束的軌跡;控制
2025-08-31 15:40:241584 
[首發(fā)于智駕最前沿微信公眾號(hào)]把自動(dòng)駕駛汽車想象成一個(gè)不斷學(xué)習(xí)并做決定的人,車上的“眼睛”負(fù)責(zé)看(感知)、“記憶/推理”負(fù)責(zé)想(預(yù)測與決策)、“手腳”負(fù)責(zé)做(規(guī)劃與控制),決策系統(tǒng)則處在這個(gè)鏈條
2025-10-26 09:55:331455 
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論