 電子發(fā)燒友App
電子發(fā)燒友App



無人機作為空中機器人,在軍事上可用與偵查、監(jiān)視等,在民用 上可用于大地測量、搖感等,主要希望能獲得高分辨率、能描述物體集合形態(tài)的二位或三維圖像,但是高分辨率圖像數(shù)據(jù)量相當大,而且隨著地面分辨率提高,需要傳輸?shù)膱D像數(shù)據(jù)量呈幾何級數(shù)增長,數(shù)據(jù)碼數(shù)率也迅速增長,因此,圖像的高速傳輸已經(jīng)成為制約無人機應用的重要問題。
設計特點
A.體積小巧:發(fā)射機體積小巧,重量輕,能夠減少無人機承載壓力,有易于無人機空中任務完成。B.可靠性高:系統(tǒng)采用先進的COFDM調(diào)制技術(shù),抗干擾能力非常強,同時采用256位AES加密技術(shù),能夠有效的防止干擾和竊聽。C.易用性強:采用高科技手段,進行智能化設計,盡量減少系統(tǒng)操作的復雜性,并作到系統(tǒng)工作穩(wěn)定可靠,維護簡單。D.傳輸距離遠:系統(tǒng)功率控制在1W以內(nèi),利用無人機飛行高度,能夠保障傳輸距離在3公里以上,同時系統(tǒng)有較強的繞射能力和穿透能力,能夠應對建筑物阻擋問題。E.傳輸圖像清晰:系統(tǒng)采用最新H.264/MPEG-2/4壓縮方式,所傳視頻能夠達到D1效果,使無人機所拍的圖像清晰展現(xiàn)至用戶面前。
方案設計
根據(jù)用戶需求本方案設計效果圖如下;
無人機上安裝有視頻采集設備、無線圖像發(fā)射機、電池等。將無線圖像發(fā)射機與電池固定在無人機底部,運用-3饋線將發(fā)射天線垂直安裝在機尾(也可根據(jù)用戶需求進行安裝)。將無人機視頻源與發(fā)射機連接,使其形成完整的無人機無線視頻發(fā)射系統(tǒng)。無人機無線視頻發(fā)射機發(fā)射的信號通過地面無線圖像接收平臺接收,接收平臺可以清晰的將無人機采集到的圖像顯示在顯示屏幕上,也可通過平臺外接口將視頻信號傳至其他顯示/存儲設備上。同時地面接收平臺可內(nèi)嵌網(wǎng)絡傳輸模塊,將視頻信號運用網(wǎng)絡傳輸方式,傳至后端中心站。
ORANGE系列產(chǎn)品技術(shù)優(yōu)勢 ORANGE系列產(chǎn)品采用先進的COFDM(信道編碼的正交頻分復用)全數(shù)字調(diào)制解調(diào)技術(shù)及MPEG2/MPEG4/H.264數(shù)字壓縮編碼技術(shù),具備以下特點: 具備“非視距”、“繞射”和良好穿透能力 COFDM調(diào)制技術(shù)具備多徑分集能力,抗多徑干擾能力強,具備“非視距”、“繞射”傳輸特點和良好穿透能力,適應在城區(qū)、山地、建筑物內(nèi)外等不能通視及有阻擋的環(huán)境中應用。
產(chǎn)品介紹
根據(jù)用戶提供的技術(shù)要求我們見意您使用機載微型發(fā)射機和便攜式一體接收機,如下圖所示;
機載微型發(fā)射機外觀圖
發(fā)射天線
“Orange機載微型發(fā)射機”采用超微型模塊外觀設計,具有體積小(100mm×55mm×23mm)、重量輕(260g)、功耗低(<10W)、靈敏度高(-108db)、安裝靈活等特點,它集小型天線、微型功放、數(shù)字調(diào)制、視音頻數(shù)字壓縮于一體,可用于現(xiàn)場高清晰圖像傳輸,通視條件下傳輸距離可達 10公里以上。廣泛的應用在公安、部隊、應急、資源勘探、廣播電視等行業(yè)中的軍事偵察、無人偵察機、機器人偵查、新聞媒體攝像機、技術(shù)偵察、消防救災等行動。
便攜式一體接收機
接收天線
吸盤
“Orange便攜式一體接收機”采用專業(yè)防潮箱外形結(jié)構(gòu),適合野外安裝使用,設備采用交流、直流兩種供電方式。集液晶顯示、電池供電、錄像存儲(定制)、網(wǎng)絡傳輸(定制)、各種外接口與一體,具有在野外、室內(nèi)任何地點即開即用的優(yōu)勢,操作簡單、功能齊全,配合我公司無線發(fā)射前段使用,是公安、武警、軍隊、地質(zhì)災害、消防等部門用于現(xiàn)場偵查的良好工具。設備提供多種接口:包括標準音視頻接口(BNC、蓮花頭)、以太網(wǎng)接口(10/100BASE-T自適應),RS232數(shù)據(jù)接口。預留GPS數(shù)據(jù)接口和雙向語音業(yè)務接口。
TOP2 無人機應用于航空測繪的解決方案
隨著3S技術(shù)為代表的高新測繪技術(shù)和計算機技術(shù)的快速發(fā)展,傳統(tǒng)的測繪行業(yè)正在迅速向地理信息產(chǎn)業(yè)轉(zhuǎn)化。傳統(tǒng)的測繪生產(chǎn)主體模式已發(fā)生根本性變化,產(chǎn)品由模擬形式轉(zhuǎn)為數(shù)字形式,大量的外業(yè)測量被室內(nèi)地理信息采集所取代。地理信息的采集、存貯、加工和分發(fā)已成為一種全新的概念。
隨著市場經(jīng)濟體制的建立和不斷完善,測繪市場發(fā)育趨向成熟。首先,測繪產(chǎn)品的需求不斷增大,服務領(lǐng)域不斷拓寬。近年來,除傳統(tǒng)用戶外,電信、公安、環(huán)保、金融等行業(yè)的需求不斷增長,測繪產(chǎn)品的服務面幾乎覆蓋了國民經(jīng)濟的所有行業(yè),初步實現(xiàn)了測繪為國民經(jīng)濟建設、國防、民眾和政府服務的行業(yè)目標,充分顯示了測繪行業(yè)的重要性。
二、行業(yè)需求分析

三、無人機航空測繪系統(tǒng)具體解決方案
(一)應用無人機遙感技術(shù)采集數(shù)據(jù)
我司通過無人機航攝所獲取的豎直攝影影像、交向攝影影像、傾斜影影像以及復雜航線多基線攝影影像;通過多視影像匹配自動構(gòu)建空中三角測量網(wǎng),能進行多達 10000片影像的大區(qū)域網(wǎng)光束平差;配合低空遙感的高分辨率影像,實現(xiàn)高精度航測定位;并且,能自動化生產(chǎn)數(shù)字高程模型(DEM)和數(shù)字正射影像(DOM)等產(chǎn)品。
(1)快速響應
無人機航測通常低空飛行,空域申請便利,受氣候條件影響較小。對起降場地的要求,可通過一段較為平整的路面實現(xiàn)起降。升空準備時間15分鐘即可、操作簡單、運輸便利。車載系統(tǒng)可迅速到達作業(yè)區(qū)附近設站,根據(jù)任務要求每天可獲取數(shù)十至兩百平方公里的航測結(jié)果。
(2)快速獲取地表數(shù)據(jù)和建模
系統(tǒng)攜帶的數(shù)碼相機、數(shù)字彩色航攝相機等設備可快速獲取地表信息,獲取超高分辨率數(shù)字影像和高精度定位數(shù)據(jù),生成DEM、三維正射影像圖、三維景觀模型、三維地表模型等二維、三維可視化數(shù)據(jù),便于進行各類環(huán)境下應用系統(tǒng)的開發(fā)和應用。
(二)利用像素工廠進行后期數(shù)據(jù)處理
利用無人機遙感技術(shù),結(jié)合像素工廠進行信息處理和分析。所得的數(shù)據(jù)將成立體三維圖像,實時反饋給主管部門。
像素工廠(Pixel Factory,PF)由法國SPOT INFOTERRA公司研制開發(fā),是一套用于大型生產(chǎn)的對地觀測數(shù)據(jù)處理系統(tǒng),是一種能批量生產(chǎn),且由一系列算法、工作流程和硬件設備組成的復合最優(yōu)化系統(tǒng),包含具有強大計算能力的若干個計算節(jié)點。輸入航空數(shù)碼影像、衛(wèi)星影像、或者傳統(tǒng)光學掃描影像,在少量人工干預的條件下,經(jīng)過一系列自動化處理,輸出包括數(shù)字表面模型(DSM)、數(shù)字高程模型(DEM)、正射影像(DOM)以及真正射影像(TDOM)等產(chǎn)品,并能生成一系列其他中間產(chǎn)品。
TOP3 正射影像和傳統(tǒng)正射影像
1. 大規(guī)模生產(chǎn)真正射影像和傳統(tǒng)正射影像
真正射影像(TrueOrtho?)指所有物體的傾斜均被糾正的一種鑲嵌影像。它是利用數(shù)字表面模型DSM,采用數(shù)字微分糾正技術(shù),改正原始影像的幾何變形,保證影像上每點都是完全垂直視角。像素工廠可以通過對多視角的影像逐點計算,消除所有傾斜,生成真正射影像。與傳統(tǒng)的正射影像相比,在大比例尺影像圖中,避免了高大建筑的傾斜對其它地物的遮擋,在拼接地區(qū)能夠?qū)崿F(xiàn)平滑自然的過渡。利用完美的DSM 能夠生成完美的真正射影像。像素工廠實現(xiàn)了真正射產(chǎn)品的商業(yè)化和大規(guī)模生產(chǎn),并實現(xiàn)了針對真正射影像的一系列解決方案,例如大氣糾正、物理糾正、勻色等。真正射影像圖直接用于做線畫圖,可大大降低制圖成本,提高作業(yè)效率。
傳統(tǒng)攝影測量處理中,經(jīng)過數(shù)字高程模型(DEM)校正、鑲嵌得到正射影像。根據(jù)影像獲取的幾何原理,繁華的城市地區(qū)需要一些手工編輯以最小化每張影像的視差(建筑物傾斜) 。而真正射影像通過高精度DSM糾正消除了所有視差,建立了完全垂直視角的地表景觀,建筑物保持垂直視角,因此在真正射影像上,只顯示了建筑物的頂部,不顯示側(cè)面,避免了高大建筑物對其他地表信息(其他較矮建筑物、道路、停車場、綠地等)的遮擋,恢復了橋梁的正確方位。下圖反映了傳統(tǒng)正射影像與真正射影像之間的主要區(qū)別。
(a) 傳統(tǒng)正射影像中有建筑物傾斜效果
(b) 真正射影像中沒有任何建筑物傾斜效果
像素工廠專利產(chǎn)品-真正射影像?(全自動處理)
傳統(tǒng)正射影像
真正射影像
2. 數(shù)字表面模型(DSM)
像素工廠具有全自動提取密集數(shù)字表面模型DSM的能力,與傳統(tǒng)攝影測量系統(tǒng)相比,像素工廠的優(yōu)勢之一就在于數(shù)字表面模型(DSM) 的計算。傳統(tǒng)的攝影測量系統(tǒng)計算DSM 需要人工估計高程信息,而“像素工廠”則可以在25cm 到1m 的地面采樣距離(GSD) 之間自動進行DSM 計算, 無需人工干預。
在加載了影像數(shù)據(jù)之后,像素工廠會利用專有的算法生成大量立體像對,并將這些立體像對分配到可用的計算結(jié)點上進行并行計算,這樣可以減少立體像對匹配過程所花費的時間。根據(jù)對多視角數(shù)據(jù)的自動多重相關(guān),可輕松提取DSM,航向和旁向的立體像對之間通過多相關(guān)方法進行匹配,這是一個逐點進行計算的過程。自動化算法可從原始影像每兩像素提取高程信息,最后通過融合得到數(shù)字表面模型。此外,像素工廠系統(tǒng)可以導入導出 LAS(LIDAR)格式數(shù)據(jù),因此可對LIDAR DSM和多重相關(guān)生成的DSM進行混合。
3.數(shù)字地形模型(DTM)
像素工廠通過對DSM采取濾波算法,可半自動化的生成DTM,減少50%到95%的人工編輯。
TOP4 無人機高清影像實時壓縮處理傳輸平臺解決方案
無人機低空航拍攝影技術(shù)作為一項空間數(shù)據(jù)獲取的重要手段,具有續(xù)航時間長、影像實時傳輸、高危地區(qū)探測、成本低、高分辨率、機動靈活等優(yōu)點,是衛(wèi)星遙感與有人機航空遙感的有力補充,在國外已得到廣泛應用。而隨著我國信息化建設和科學技術(shù)的不斷進步和發(fā)展,無人機的研究發(fā)展在總體設計、飛行控制、組合導航、中繼數(shù)據(jù)鏈路系統(tǒng)、傳感器技術(shù)、圖像傳輸、信息對抗與反對抗、發(fā)射回收、生產(chǎn)制造和實際應用等諸多技術(shù)領(lǐng)域都有了長足的進步,達到了實際應用水平。這些致使無人機低空航拍攝影的廣泛應用已經(jīng)成為必然趨勢,2009年國家遙感、測繪系統(tǒng)大力推動該技術(shù)發(fā)展,促使無人機低空航拍攝影項目逐漸成為測繪、規(guī)劃、應急等國家單位積極推行的先進項目和技術(shù)示范項目。
平臺介紹
機載圖像處理系統(tǒng)需要處理的視頻種類多樣,如高清晰光學相機拍攝的運動視頻或者高分辨率圖片,機載SAR成像系統(tǒng)產(chǎn)生的SAR圖像。以上視頻或圖像都需要壓縮編碼,然后存儲或傳輸。本項目是以無人機為飛行平臺,利用高分辨CCD相機系統(tǒng)獲取遙感影像,利用空中和地面控制系統(tǒng)實現(xiàn)影像的自動拍攝和獲取,同時實現(xiàn)航跡的規(guī)劃和監(jiān)控、信息數(shù)據(jù)的壓縮和自動傳輸、影像預處理等功能,可廣泛應用于國家生態(tài)環(huán)境保護、礦產(chǎn)資源勘探、海洋環(huán)境監(jiān)測、土地利用調(diào)查、水資源開發(fā)、農(nóng)作物長勢監(jiān)測與估產(chǎn)、農(nóng)業(yè)作業(yè)、自然災害監(jiān)測與評估、城市規(guī)劃與市政管理、森林病蟲害防護與監(jiān)測、公共安全、國防事業(yè)、數(shù)字地球等領(lǐng)域。
項目主要用于遙感影像的獲取,同時可以根據(jù)需要搭配衛(wèi)星遙感和有人機遙感平臺,實現(xiàn)高低搭配,優(yōu)勢互補。無人機低空航拍攝影廣泛應用于國家基礎地圖測繪、數(shù)字城市建設、通信站點建設、國土資源調(diào)查、土地地籍管理、城市規(guī)劃、突發(fā)事件實時監(jiān)測、災害預測與評估、城市交通、網(wǎng)線鋪設、數(shù)字農(nóng)業(yè)、測繪、環(huán)境治理、生態(tài)保護、森林管理、礦產(chǎn)開發(fā)等領(lǐng)域,對國民經(jīng)濟的發(fā)展具有十分重要的現(xiàn)實意義。
1、項目內(nèi)容
機載視頻圖像種類多樣,要求編碼器具備很高的處理能力和靈活性。基于CCD傳感器+DM6467的智能視頻處理套件說明書,廣泛用于智能監(jiān)控、電子警察、視頻會議、生物儀器、機器視覺等領(lǐng)域。該平臺主要通過CCD傳感器采集圖像,通過DSP進行信號處理,獲得智能信息,并進行圖像壓縮和抓拍。從而為各種應用提供報警信息和現(xiàn)場采樣。
CCD傳感器主要采用sony ICX274AL芯片。


TI 芯片TMS320DM6467,為TI 新一代高清視頻處理芯片,通過其多內(nèi)核設計,能實現(xiàn)較前代數(shù)字媒體處理器高十倍的性能。DM6467 處理器集成了 ARM 與 DSP 內(nèi)核,并采用高清視頻/影像協(xié)處理器 (HD-VICP)、視頻數(shù)據(jù)轉(zhuǎn)換引擎以及目標視頻端口接口。HD-VICP 通過面向 HD 1080i H.264 high profile 轉(zhuǎn)碼的專用加速器,實現(xiàn)了超過 3 GHz 的DSP 處理能力,同時視頻數(shù)據(jù)轉(zhuǎn)換引擎還能管理包括垂直下調(diào)節(jié) (downscaling)、色度采樣 (chroma sampling) 以及菜單覆蓋 (menu overlay) 功能等在內(nèi)的視頻處理任務。DSP 內(nèi)核可用于管理多格式視頻轉(zhuǎn)碼,并為支持其它應用性能預留了足夠空間。DM6467 可滿足媒體網(wǎng)關(guān)與 MCU 等需要轉(zhuǎn)碼技術(shù)的市場要求,但其強大的靈活性與高效性對要求同時進行高清編碼與解碼的應用來說也非常具有吸引力,如視頻語音或視頻安全等對于多通道標清編碼要求較高的市場。該器件的連接外設中還包括業(yè)界標準 PCI 總線與千兆以太網(wǎng)。
TOP5 開發(fā)以該芯片為基礎的硬件平臺
開發(fā)以該芯片為基礎的硬件平臺是本項目的核心內(nèi)容,主要功能如下:
1)相機結(jié)構(gòu)為自定義尺寸,大小為100mm X 70mm X 56mm 2)系統(tǒng)采用DSP+FPGA為核心結(jié)構(gòu),DSP為TMS320DM6467 主頻為729MHz,F(xiàn)PGA為Altera芯片 EP3C25F324。3)支持 一路高清CCD 200萬象素的原始數(shù)據(jù)流輸入接口。4)支持一路千兆網(wǎng)絡傳輸,為RJ45電口。5)支持1路RS232通信,兼容RS485。6)支持自動光圈,自動電子快門功能,適應不同監(jiān)控環(huán)境7)工作電壓:電壓/直流12V,功耗小于5W。8)環(huán)境條件: 工作溫度:-20℃~+60℃;存儲溫度:-45℃~+65℃;相對濕度:《=95±3%,+35±3℃;9)振動、沖擊要求為:振動:2g(20Hz~500Hz~20Hz)(剛性);沖擊:垂直軸向 ≥15g;橫軸方向 ≥10g;縱軸方向 ≥10g
3、軟件支持
1)支持linux 操作系統(tǒng)2)支持H.264的視頻壓縮,Jpeg圖片壓縮。3)支持高清和 CIF 雙碼流輸出4)支持網(wǎng)絡的RTCP UDP數(shù)據(jù)發(fā)送.5)支持客戶端測試程序。6)根基您的需要可以植入其它算法。
4、應用范圍:
可用于人臉識別、車牌識別、行為識別、機器視覺、生產(chǎn)線檢測、生物儀器、醫(yī)療儀器等二次開發(fā)和使用。
產(chǎn)品實例
無人機系統(tǒng)通過配置攝像機、高分辨率照相機、紅外夜視儀和圖像傳輸?shù)热蝿赵O備,實現(xiàn)空中巡視,并在巡視中實時傳回視頻圖像,存儲高清照片供返回地面處理,其中紅外夜視儀的配置滿足夜晚的巡視要求。
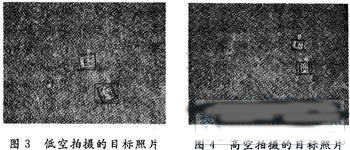
航拍原圖:
實際比例局部圖:
TOP6 基于PC104無人機網(wǎng)絡視頻系統(tǒng)的構(gòu)建
無人機具有體積小、重量輕、靈活機動、成本低等特點,可以用于對地偵察拍照,還可以廣泛應用于軍事偵察、地質(zhì)勘探以及對火災等危險區(qū)域的勘察預報等,因而在無人機上構(gòu)建一個網(wǎng)絡視頻系統(tǒng)就顯得十分重要。本文以基于 PC104的無人機為基礎,構(gòu)建一個網(wǎng)絡視頻系統(tǒng),其中,無人機視頻數(shù)據(jù)的采集、壓縮、解壓縮、傳輸都是無人機網(wǎng)絡視頻系統(tǒng)中的關(guān)鍵技術(shù),本文將針對這幾部分的關(guān)鍵問題進行研究。
1 系統(tǒng)結(jié)構(gòu)及工作原理
該系統(tǒng)的下位機主要由深圳桑達公司的PC104工控機、羅技快看太空版MP攝像頭(USB接口)、linksysWRT54GC-CN無線路由器及外圍電路組成,采用嵌入式 Linux 2.4.26操作系統(tǒng),主要負責視頻數(shù)據(jù)的采集,壓縮及將數(shù)據(jù)發(fā)送到上位機。上位機是包含有無線網(wǎng)卡的PC電腦,主要負責視頻數(shù)據(jù)的接收、解壓和顯示,上下位機通過UDP/IP網(wǎng)絡協(xié)議進行數(shù)據(jù)的傳輸,采用socket網(wǎng)絡編程可以實現(xiàn)網(wǎng)絡的互聯(lián)及數(shù)據(jù)的收發(fā)。PC104工控機采用嵌人式專用CPU PⅢ533~933 MHz,板載DDR內(nèi)存高達128MB,提供2個RS 232串行接口,2個USB接口,1個并行口,軟盤驅(qū)動器接口,IDE硬盤驅(qū)動器,10/100 Base-TX Ethernet接口,CRT/LCD顯示器接口和固態(tài)盤插座,支持DiskOnChip 8~288 MB。PC104工控機的操作和使用與PC機相同,安裝系統(tǒng)硬件后,即可開機進行BIOS設置,輸入電壓必須為+5 V,其波動范圍不超過5%。
2 視頻數(shù)據(jù)采集的軟件實現(xiàn)
Video4Linux(V4L)是嵌入式Linux下視頻設備的內(nèi)核驅(qū)動,他為Linux下的視頻設備提供了一系列的接口函數(shù),在編譯和配置內(nèi)核階段,必須增加V4L模塊和USB攝像頭驅(qū)動模塊的支持。對于USB接口攝像頭,其驅(qū)動程序中需要提供基本的I/O操作函數(shù) open,read,write,close的實現(xiàn),對中斷的處理實現(xiàn),內(nèi)存映射功能以及對I/O通道的控制接口函數(shù)ioctl的實現(xiàn)等,并把他們定義在 struct file operations中。這樣當應用程序?qū)υO備文件進行諸如open等系統(tǒng)調(diào)用操作時,Linux內(nèi)核將通過fileoperations結(jié)構(gòu)訪問驅(qū)動程序提供的函數(shù)。在系統(tǒng)平臺上對USB攝像頭進行驅(qū)動,首先把USB控制器驅(qū)動模塊靜態(tài)編譯進內(nèi)核,使平臺中支持USB接口,再在需要使用攝像頭采集時,使用insmode動態(tài)加載其驅(qū)動模塊,這樣攝像頭就可正常工作了。
在USB攝像頭被驅(qū)動后,再利用Video4Linux支持的幾個視頻采集相關(guān)的數(shù)據(jù)結(jié)構(gòu)進行編程,就可以實現(xiàn)視頻數(shù)據(jù)的采集。圖1是嵌入式Linux下視頻數(shù)據(jù)采集的流程:


使用ioctl(devfd,VIDIOCSYNC,&vid_mmap)函數(shù)判斷一幀圖像是否截取完畢,成功返回表示截取完畢,之后就可把圖像數(shù)據(jù)保存成文件的形式。為了得到連續(xù)幀視頻圖像,可在單幀的基礎上,利用vid_buf.frames值確定采集完攝像頭幀緩沖區(qū)幀數(shù)據(jù)進行循環(huán)的次數(shù)。在循環(huán)語句中,也是使用VIDIOCMCAPTURE ioctl和VIDIOCSYNC ioct1函數(shù)完成每幀截取,但要給采集到的每幀圖像賦地址,利用語句buf=map+vid_buf.off-sets[frame],然后保存成文件的形式。
3 視頻數(shù)據(jù)壓縮原理
無人機系統(tǒng)的下位機要求實時傳輸視頻數(shù)據(jù)到上位機,由于視頻數(shù)據(jù)量較大且網(wǎng)絡帶寬非常寶貴,對視頻數(shù)據(jù)選用一種高壓縮比的文件格式顯得十分重要。 JPEG是聯(lián)合圖像專家組(Joint Picture Expert Group)的英文縮寫,是國際標準化組織(ISO)和CCITT聯(lián)合制定的靜態(tài)圖像的壓縮編碼標準。和相同圖像質(zhì)量的其他常用文件格式(如 GIF,TIFF,PCX)相比,JPEG是目前靜態(tài)圖像中壓縮比最高的,而圖像質(zhì)量卻差不多。正是由于JPEG的高壓縮比,使得他廣泛地應用于多媒體和網(wǎng)絡編程中。
JPEG-專家組開發(fā)了兩種基本的壓縮算法,一種是采用以離散余弦變換(Discrete Cosine Transform,DCT)為基礎的有損壓縮算法,另一種是采用以預測技術(shù)為基礎的無損壓縮算法。使用有損壓縮算法時,在壓縮比為25:1的情況下,壓縮后還原得到的圖像與原始圖像相比較,非圖像專家難于找出他們之間的區(qū)別,因此得到了廣泛的應用。JPEG壓縮是有損壓縮,他利用了人的視角系統(tǒng)的特性,使用量化和無損壓縮編碼相結(jié)合來去掉視角的冗余信息和數(shù)據(jù)本身的冗余信息。JPEG算法框圖如圖2所示。

壓縮編碼大致分成3個步驟:
(1) 通過DCT去除數(shù)據(jù)冗余。DCT是影像壓縮的重要步驟,他通過正交變換將圖像由空間域轉(zhuǎn)換為頻率域。對于N×N維的數(shù)據(jù),經(jīng)變換以后仍然得到N×N的數(shù)據(jù),雖然DCT變換本身并不對影像進行壓縮,但變換消除了N×N維數(shù)據(jù)之間的冗余性。DCT變換是壓縮過程中量化和編碼的基礎。
(2) 使用量化表對DCT系數(shù)進行量化。量化表是一個量化系數(shù)矩陣,通過量化可以降低整數(shù)的精度,減少整數(shù)存儲所需的位數(shù)。量化過程除掉了一些高頻分量,損失了高頻分量上的細節(jié)。由于人類視覺系統(tǒng)對高空間頻率遠沒有低頻敏感,經(jīng)過量化處理的圖像從視覺效果來看損失很小。由于低空間頻率中包含大量的影像信息,經(jīng)過量化處理后,在高空間頻率段,出現(xiàn)大量連續(xù)的零,這有利于以后通過編碼減小數(shù)據(jù)量。
(3) 對量化后的DCT系數(shù)進行編碼使其熵達到最小。遙感圖像數(shù)據(jù)經(jīng)過DCT和量化之后,在高頻率段會出現(xiàn)大量連續(xù)的零,采用Huffman可變字長編碼,可使冗余量達到最小。
譯碼或者叫做解壓縮的過程與壓縮編碼過程正好相反。根據(jù)上述JPEG數(shù)據(jù)壓縮解壓原理,在C編譯器和集成開發(fā)環(huán)境(Code Composer Studio,CCS)中開發(fā)實現(xiàn)了圖像壓縮解壓程序,便可應用于無人機視頻數(shù)據(jù)的處理中。視頻數(shù)據(jù)壓縮處理程序的接口如下:

4 網(wǎng)絡傳輸協(xié)議及socket編程
根據(jù)OSI網(wǎng)絡標準定義,網(wǎng)絡由物理層、數(shù)據(jù)鏈路層、網(wǎng)絡層、傳輸層、會話層、表示層和應用層7層組成。而在實際應用中,網(wǎng)絡結(jié)構(gòu)可采用鏈路層、網(wǎng)絡層、傳輸層和應用層4層模型。
在TCP/IP協(xié)議組中,IP協(xié)議是網(wǎng)絡層協(xié)議。TCP協(xié)議是一種面向連接的協(xié)議,他能夠提供可靠的、全雙工的網(wǎng)絡通信服務,具有確認、數(shù)據(jù)流控制、多路復用和數(shù)據(jù)同步等功能,適合高質(zhì)量數(shù)據(jù)的傳輸,是目前應用最為廣泛的網(wǎng)絡傳輸協(xié)議之一。但是,由于TCP協(xié)議實現(xiàn)復雜,網(wǎng)絡開銷大,以及其提供的確認與超時重傳機制都給數(shù)據(jù)傳輸帶來很大的時延。因此TCP協(xié)議不適合傳輸實時視頻數(shù)據(jù)和突發(fā)性的大量數(shù)據(jù)。
UDP協(xié)議是無連接協(xié)議,報文交換機理簡單,不存在多重確認機制,從而減少了因建立連接和撤除連接所需要的巨大開銷。每個分組都攜帶完整的目的地址,在各分組系統(tǒng)中獨立傳送,他不保證分組的先后順序,不進行分組出錯的恢復與重傳,因此無法保證傳輸?shù)目煽啃院头召|(zhì)量。但是相對于TCP協(xié)議,UDP 協(xié)議減少了確認、同步等操作,節(jié)省了很大的網(wǎng)絡開銷。他能夠提供高傳輸效率的數(shù)據(jù)報服務,能夠?qū)崿F(xiàn)數(shù)據(jù)的實時性傳輸,在數(shù)據(jù)的實時傳輸中應用廣泛。為了保證無人機視頻數(shù)據(jù)傳輸?shù)膶崟r性,采用IP協(xié)議和UDP協(xié)議作為系統(tǒng)的通信協(xié)議。
系統(tǒng)中網(wǎng)絡傳輸部分的軟件實現(xiàn)采用socket(套接口)編程技術(shù),系統(tǒng)調(diào)用socket()函數(shù),返回一個整型的socket描述符,視頻數(shù)據(jù)傳輸便是通過該socket函數(shù)實現(xiàn)的。常用的socket類型對應于傳輸協(xié)議也有兩種:流式socket和數(shù)據(jù)報式socket。前者使用TCP協(xié)議,后者使用UDP協(xié)議,本系統(tǒng)中采用的是數(shù)據(jù)報式socket。以下是下位機socket編程的主要實現(xiàn):

由上位機的無線網(wǎng)卡負責接收下位機的視頻數(shù)據(jù),并根據(jù)JPEG圖像的解壓原理對視頻數(shù)據(jù)進行解壓縮并顯示。圖3,圖4可以看到從下位機采集到視頻數(shù)據(jù)并通過處理之后發(fā)到上位機然后顯示出來的效果。
本文主要介紹了一種基于PC104無人機的視頻系統(tǒng)構(gòu)建方法和流程,以PC104工控機為主要硬件平臺,完成了對攝像頭視頻數(shù)據(jù)的采集、壓縮、傳輸?shù)冗^程的詳細介紹和軟件設計,采用網(wǎng)絡UDP/IP網(wǎng)絡傳輸協(xié)議和socket編程傳輸視頻數(shù)據(jù),保證了一定程度上的實時性,可以滿足無人機地質(zhì)勘探、火災偵察等領(lǐng)域的應用。
TOP7淺談無人機飛控系統(tǒng)解決方案
隨著科學技術(shù)的發(fā)展以及軍事戰(zhàn)略思想的轉(zhuǎn)變,無人機在軍事、民用等領(lǐng)域獲的應用越來越廣泛,比如航空測量、航空攝影、偵察、森林防火等。為解決困擾我國無人機發(fā)展的高精度和小型化的難題,我公司經(jīng)過幾年的研究終于攻克了難關(guān),開發(fā)出一套具有我國自主知識產(chǎn)權(quán)的無人機飛控系統(tǒng)。高精度要求無人機的制導控制精度高,能夠適應復雜的外界環(huán)境。小型化則對控制系統(tǒng)的重量和體積提出了更高的要求,要求控制部件的體積越小越好。
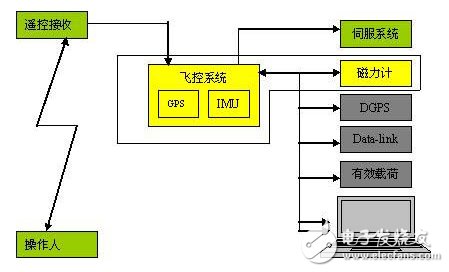
控制系統(tǒng)由四部分組成
嵌入式計算機系統(tǒng)、GPS 接收模塊、IMU、接口
軟件界面
方案特點
姿態(tài)和速度控制,正常情況下使用姿態(tài)穩(wěn)定和速度控制,在出現(xiàn)較大的干擾情況下使用速度穩(wěn)定和姿態(tài)控制,大大增加了飛行安全;實現(xiàn)了遙控手柄、航路點和地形匹配引導功能。可以由外環(huán)生成內(nèi)環(huán)控制指令;通過擴展卡爾曼(EKF)濾波實現(xiàn)GPS/INS 捷聯(lián)組合導航;對飛行負載、重心等變化的自適應性,大大提高了飛行精度和飛行安全; 3M 數(shù)據(jù)記錄空間; 導航算法對震動和其他干擾適應能力強。即使在惡劣的震動情況下也能得到滿意的導航數(shù)據(jù);使用VxWorks 或uCOS 操作系統(tǒng),實時強,可靠性高,方便裁減,方便在不同硬件平臺上移植。對硬件的依賴性低。
無人機技術(shù)專題:讓你了解最前端設計,詳情請進入》》》
?








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論