HJ4205是一款步進(jìn)電機(jī)驅(qū)動(dòng)電路。包含一個(gè)步進(jìn)電機(jī)控制器和內(nèi)部N溝道MOSFET,來(lái)驅(qū)動(dòng)一個(gè)雙極步進(jìn)電機(jī)或兩個(gè)刷式直流電機(jī)。HJ4205支持全步進(jìn)到1/256步進(jìn)驅(qū)動(dòng)模式。通過(guò)使用自適應(yīng)消隱時(shí)間和包括自動(dòng)混合衰減模式在內(nèi)的多種不同的電流衰減模式,可實(shí)現(xiàn)非常平滑的運(yùn)動(dòng)過(guò)程。
2025-05-07 16:19:56 1575
1575 
步進(jìn)電機(jī) 步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(即步進(jìn)角)。您可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量
2017-12-06 17:19:0123500 
stm32為例,使用ULN2003,TB6600電機(jī)驅(qū)動(dòng)板,介紹步進(jìn)電機(jī)的常用驅(qū)動(dòng)方式。
2022-09-02 17:08:347100 
上一篇博文簡(jiǎn)介了一下步進(jìn)電機(jī)控制程序的配置和思路。這一篇就介紹步進(jìn)電機(jī)驅(qū)動(dòng)器的簡(jiǎn)介以及使用方法。這里我們以TB6600步進(jìn)電機(jī)驅(qū)動(dòng)器為例,進(jìn)行介紹。其他型號(hào)的驅(qū)動(dòng)器也大同小異。如圖是我們使用的步進(jìn)
2021-06-29 09:01:06
的影響。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過(guò)控制脈沖個(gè)數(shù)來(lái)控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)
2016-01-13 17:15:16
【單片機(jī)】步進(jìn)電機(jī)控制一、操作目的二、操作內(nèi)容三、預(yù)備知識(shí)四、操作接線圖五、程序框圖六、程序清單七、代碼詳解一、操作目的了解步進(jìn)電機(jī)控制的基本原理,掌握步進(jìn)電機(jī)轉(zhuǎn)動(dòng)編程方法。二、操作內(nèi)容讀取顯示器上
2022-01-10 08:26:47
步進(jìn)電機(jī)最簡(jiǎn)單的驅(qū)動(dòng)方法,了解四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理 四軸步進(jìn)電機(jī)驅(qū)動(dòng)器原理-簡(jiǎn)介四軸步進(jìn)電機(jī)驅(qū)動(dòng)器,其實(shí)就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。首先步進(jìn)驅(qū)動(dòng)器會(huì)接收到一個(gè)脈沖信號(hào),然后它按設(shè)定
2021-07-12 08:18:40
步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖
2021-07-07 07:00:38
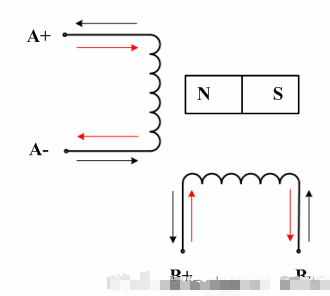
。二、步進(jìn)電機(jī)驅(qū)動(dòng)方式單極性 (unipolar) 和雙極性 (bipolar) 是步進(jìn)電機(jī)最常采用的兩種驅(qū)動(dòng)架構(gòu)。1.單極性驅(qū)動(dòng)電路使用四顆晶體管來(lái)驅(qū)動(dòng)步進(jìn)電機(jī)的兩組相位,電機(jī)結(jié)構(gòu)則如圖1...
2021-06-28 08:24:37
步進(jìn)電機(jī)詳解概述步進(jìn)電機(jī)的分類、結(jié)構(gòu)、原理單相步進(jìn)電機(jī)2相步進(jìn)電機(jī)概述根據(jù)電壓種類分類,可以分為AC和DC。根據(jù)旋轉(zhuǎn)速度以及電源頻錄之間的關(guān)系可以分為同步電機(jī)和異步電機(jī)。小型電機(jī)中步進(jìn)電機(jī)的位置如下
2021-07-08 06:46:29
/Arduino CNC電機(jī)擴(kuò)展板詳解(A4988驅(qū)動(dòng)42步進(jìn)電機(jī))概述電機(jī)步進(jìn)模式設(shè)置外接直流電源用于控制電機(jī)的Arduino引腳驅(qū)動(dòng)1個(gè)NEMA步進(jìn)電機(jī)(42步進(jìn)電機(jī))電路連接驅(qū)動(dòng)1個(gè)NEMA步進(jìn)電機(jī)(42步進(jìn)電機(jī))示例程序驅(qū)動(dòng)3個(gè)NEMA步進(jìn)電機(jī)(42步進(jìn)電
2021-06-29 09:17:20
使用的內(nèi)部集成了譯碼器的微特步進(jìn)電機(jī)驅(qū)動(dòng)器。其設(shè)計(jì)為能使雙極步進(jìn)電機(jī)以全、半、1/4、1/8、1/16步進(jìn)模式工作。步進(jìn)模式由邏輯輸入MSx選擇。輸出驅(qū)動(dòng)能力達(dá)到38V和±2A。HR4988包含一個(gè)工作在慢
2019-02-14 06:36:05
1、 概述:DRV8825驅(qū)動(dòng)步進(jìn)電機(jī),一直抖動(dòng)不轉(zhuǎn)的問(wèn)題DRV8825簡(jiǎn)介及引腳接線:2·、試接線:RESET與SLEEP接高電平;STEP:接單片機(jī)引腳。單片機(jī)引腳產(chǎn)生脈沖信號(hào),頻率需根據(jù)步進(jìn)
2021-08-31 09:33:52
這里把步進(jìn)電機(jī)的資料做個(gè)整合文章目錄步進(jìn)電機(jī)是什么原理定子定子的種類轉(zhuǎn)子及其種類工作方式單拍方式雙拍方式單雙拍方式通電方式驅(qū)動(dòng)器步進(jìn)電機(jī)是什么什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)是將電脈沖信號(hào),轉(zhuǎn)變?yōu)榻俏灰苹蚓€
2021-07-07 06:55:49
利用LM331、PMM8713 和SI - 7300A 設(shè)計(jì)了四相步進(jìn)電機(jī)驅(qū)動(dòng)電路,該驅(qū)動(dòng)電路具有工作可靠、效率高、矩頻特性好的特點(diǎn),并應(yīng)用于數(shù)控等離子弧壓自動(dòng)調(diào)高系統(tǒng)中.
步進(jìn)電機(jī)是
2008-08-26 22:44:30 65
65 MOTEC 步進(jìn)電機(jī)及驅(qū)動(dòng)器:德國(guó)MOTEC公司多年以來(lái)一直致力于步進(jìn)電機(jī)及驅(qū)動(dòng)器的研究、開(kāi)發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動(dòng)系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:5955 基于3955的步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)計(jì):步進(jìn)電機(jī)驅(qū)動(dòng)芯片3955引腳及功能介紹(1)3955概述及其引腳功能由Allegro公司生產(chǎn)的3955是一種用來(lái)驅(qū)動(dòng)雙極型步進(jìn)電機(jī)的一相繞組的驅(qū)動(dòng)芯片。使用
2010-01-09 10:23:1751 步進(jìn)電機(jī)的細(xì)分控制本質(zhì)上是對(duì)步進(jìn)電機(jī)勵(lì)磁繞組中的電流進(jìn)行控制,在普通驅(qū)動(dòng)方式下,驅(qū)動(dòng)電路只是通過(guò)對(duì)電動(dòng)機(jī)繞組激磁電流的“開(kāi)”和“關(guān)”,使步進(jìn)電動(dòng)機(jī)轉(zhuǎn)子以其本身
2010-01-09 10:27:23225 闡述了步進(jìn)電機(jī)的驅(qū)動(dòng)原理,介紹了恒流斬波、脈寬調(diào)制及細(xì)分驅(qū)動(dòng)等步進(jìn)電機(jī)驅(qū)動(dòng)電路的結(jié)構(gòu)設(shè)計(jì)方法和設(shè)計(jì)中的相關(guān)技術(shù),并給出了實(shí)現(xiàn)方案。關(guān)鍵詞:步進(jìn)電機(jī); 恒流斬波; 脈
2010-01-09 13:41:49105 步進(jìn)電機(jī)驅(qū)動(dòng)芯片有:步進(jìn)電機(jī)驅(qū)動(dòng)芯片(UM12017、UM12014)完全代替VID6606、VID6608)
還有PMM8713,BY-5064,
2008-05-23 17:35:5511596 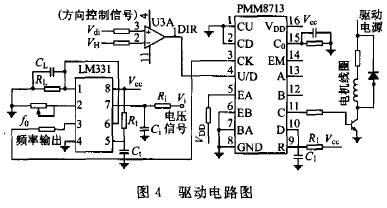
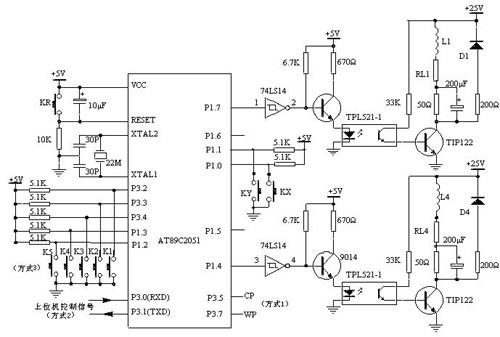
四相步進(jìn)電機(jī)驅(qū)動(dòng)電路和驅(qū)動(dòng)程序
步進(jìn)電機(jī)驅(qū)動(dòng)器系統(tǒng)電路原理圖
2008-10-21 00:42:207502 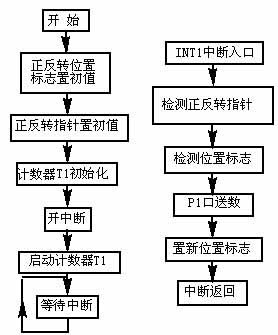
單片機(jī)驅(qū)動(dòng)步進(jìn)電機(jī)程序
NS-6型實(shí)驗(yàn)板驅(qū)動(dòng)步進(jìn)電機(jī)
控制輸出為P1口
由
2009-03-18 15:36:1212175 步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路及原理
細(xì)分原理分析
步進(jìn)電機(jī)驅(qū)動(dòng)線路,如果按照環(huán)形分配器決定的分配方式,
2010-01-09 14:07:5420064 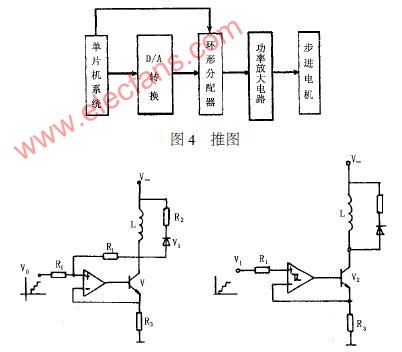
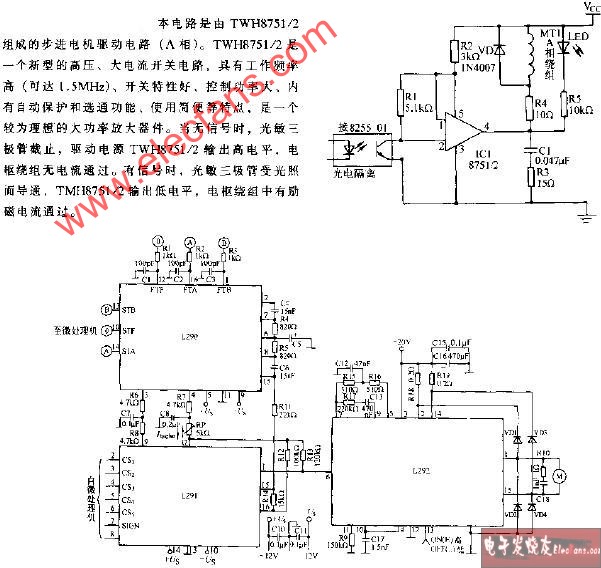
一種實(shí)用的步進(jìn)電機(jī)驅(qū)動(dòng)電路
步進(jìn)電機(jī)具有快速啟停、精確定位的特點(diǎn),在數(shù)字控制領(lǐng)域經(jīng)常使用步進(jìn)電機(jī)作為位置控制的執(zhí)行機(jī)構(gòu).步進(jìn)電機(jī)在
2010-01-09 21:13:452527 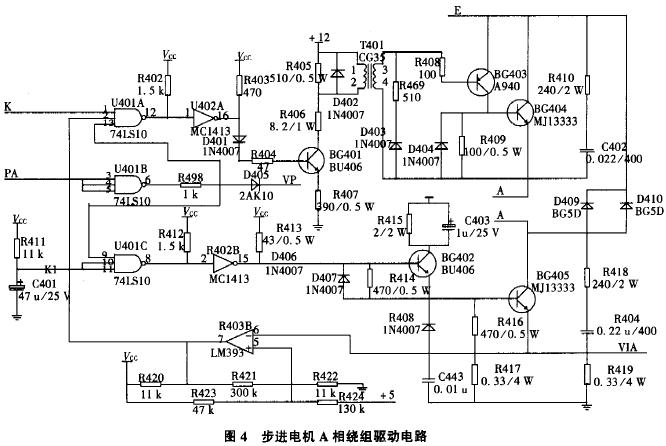
步進(jìn)電機(jī)簡(jiǎn)介
1.什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)
2010-05-24 09:36:502090 步進(jìn)電機(jī)及
驅(qū)動(dòng)電路!資料來(lái)源網(wǎng)絡(luò),如有侵權(quán),敬請(qǐng)?jiān)彛?/div>
2015-11-13 16:18:4828 驅(qū)動(dòng)電路,關(guān)于步進(jìn)電機(jī)部分,主要針對(duì)如何設(shè)置步進(jìn)電機(jī)的參數(shù)。
2016-03-14 09:52:1922 基于網(wǎng)絡(luò)的步進(jìn)電機(jī)驅(qū)動(dòng)硬件設(shè)計(jì),有需要的下來(lái)看看
2016-04-26 09:27:299 SRM32控制步進(jìn)電機(jī)驅(qū)動(dòng)器來(lái)控制步進(jìn)電機(jī),感興趣的小伙伴們可以瞧一瞧。
2016-08-23 17:56:00190 步進(jìn)電機(jī)及其驅(qū)動(dòng)原理
2016-11-18 16:53:4820 步進(jìn)電機(jī)及其驅(qū)動(dòng)原理,感興趣的小伙伴們可以瞧一瞧。
2016-11-11 18:18:326 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-06-11 11:34:2934038 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時(shí)供電的,多相時(shí)序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動(dòng)器就是為步進(jìn)電機(jī)分時(shí)供電的,多相時(shí)序控制器。
2017-08-11 16:47:2325536 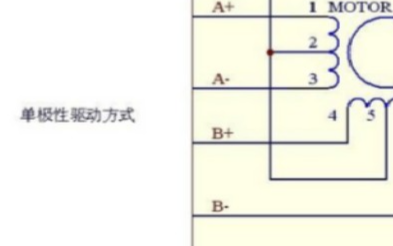
步進(jìn)電機(jī)S曲線驅(qū)動(dòng)程序,可以用作步進(jìn)電機(jī)的加減速控制。
2017-08-31 11:06:26107 設(shè)計(jì)驅(qū)動(dòng)器。本文介紹的就是為從一日本產(chǎn)舊式打印機(jī)上拆下的步進(jìn)電機(jī)而設(shè)計(jì)的驅(qū)動(dòng)器。本文先介紹該步進(jìn)電機(jī)的工作原理,然后介紹了其驅(qū)動(dòng)器的軟、硬件設(shè)計(jì)。 1. 步進(jìn)電機(jī)的工作原理 該步進(jìn)電機(jī)為一四相步進(jìn)電機(jī),采用單極性直
2017-12-04 15:08:1853876 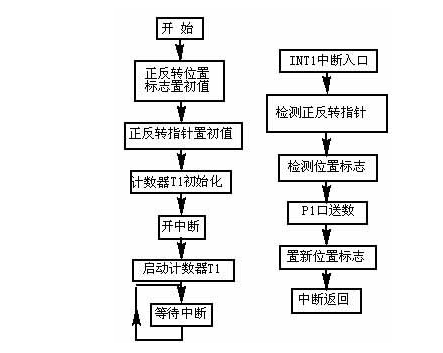
步進(jìn)電機(jī)作為控制用的特種電機(jī),是將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,它的旋轉(zhuǎn)是以固定的步進(jìn)角度一步一步運(yùn)行的。
2018-03-29 10:49:3120250 
的長(zhǎng)短來(lái)具體控制步進(jìn)角來(lái)改變電機(jī)的轉(zhuǎn)速,從而實(shí)現(xiàn)步進(jìn)電機(jī)的調(diào)速,本文主要介紹基于單片機(jī)的步進(jìn)電機(jī)轉(zhuǎn)速控制設(shè)計(jì)詳解,文章最后附上程序。
2018-04-25 16:09:1227601 本文首先介紹了步進(jìn)電機(jī)基本原理及用途,其次介紹了步進(jìn)電機(jī)分類,最后介紹了六款步進(jìn)電機(jī)驅(qū)動(dòng)芯片。
2018-05-23 16:20:15112900 本文介紹了步進(jìn)電機(jī)的控制驅(qū)動(dòng)原理和東芝的電機(jī)驅(qū)動(dòng)器,以及電機(jī)驅(qū)動(dòng)的安全技術(shù)。
2018-07-24 08:48:4125856 ?? 七特步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行
2018-11-21 15:32:402419 1. 步進(jìn)電機(jī)簡(jiǎn)介:在工業(yè)控制系統(tǒng)中,通常要控制機(jī)械部件的平移和轉(zhuǎn)動(dòng),這些機(jī)械部件的驅(qū)動(dòng)大都采用交流電機(jī)、直流電機(jī)和步進(jìn)電機(jī)。其中,步進(jìn)電機(jī)最適合數(shù)字控制,因此它在數(shù)控機(jī)床,家用電器等中得到廣泛應(yīng)用。
2019-08-09 17:33:008 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就
2019-07-31 17:35:0017 在整步運(yùn)行中,同一種步進(jìn)電機(jī)既可配整/半步驅(qū)動(dòng)器也可配細(xì)分驅(qū)動(dòng)器,但運(yùn)行效果不同。步進(jìn)電機(jī)驅(qū)動(dòng)器按脈沖/方向指令對(duì)兩相步進(jìn)電機(jī)的兩個(gè)線圈循環(huán)激磁(即將線圈充電設(shè)定電流),這種驅(qū)動(dòng)方式的每個(gè)脈沖將使電機(jī)移動(dòng)一個(gè)基本步距角,即1.80度(標(biāo)準(zhǔn)兩相電機(jī)的一圈共有200個(gè)步距角)。
2019-10-01 15:08:0010088 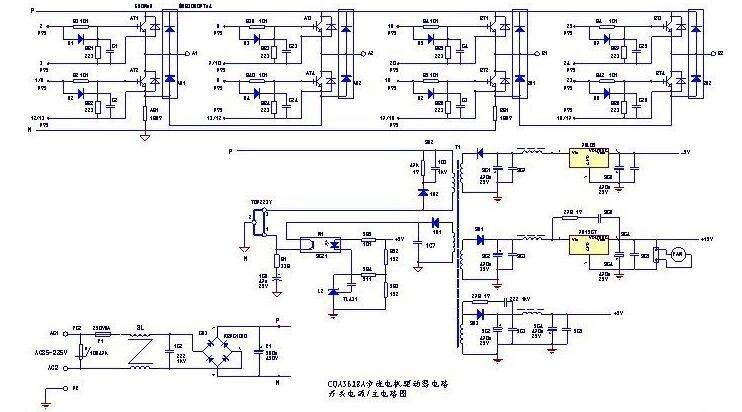
PmodSTEP通過(guò)ST L293DD為步進(jìn)電機(jī)提供了一個(gè)四通道驅(qū)動(dòng)。
2019-11-28 14:18:191851 
TB6600是一款專業(yè)的兩相步進(jìn)電機(jī)驅(qū)動(dòng)器,兼容Arduino和其他多種主控器,可實(shí)現(xiàn)電機(jī)正反轉(zhuǎn)控制,旋轉(zhuǎn)角度控制等功能。
2020-01-04 09:20:5414280 
步進(jìn)電機(jī)驅(qū)動(dòng)器主要是區(qū)別在于步進(jìn)電機(jī)線圈電流的控制精度。主要有三種驅(qū)動(dòng)模式
2020-03-22 15:56:0015555 為了讓更多的用戶了解步進(jìn)電機(jī)及步進(jìn)電機(jī)驅(qū)動(dòng)器,挑選到最適宜自個(gè)運(yùn)用懇求的步進(jìn)電機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器,特將有關(guān)選型準(zhǔn)則介紹如下
2020-03-29 16:05:007854 本文主要闡述了步進(jìn)電機(jī)驅(qū)動(dòng)器調(diào)速方法及步進(jìn)電機(jī)驅(qū)動(dòng)器的作用。
2020-04-20 09:10:2812230 本文首先介紹了步進(jìn)電機(jī)驅(qū)動(dòng)器的細(xì)分原理,其次闡述了步進(jìn)電機(jī)驅(qū)動(dòng)器怎么設(shè)置細(xì)分,最后介紹了步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分和不細(xì)分的區(qū)別。
2020-04-20 09:16:4043976 本文主要介紹了步進(jìn)電機(jī)驅(qū)動(dòng)器的參數(shù)及步進(jìn)電機(jī)驅(qū)動(dòng)器常見(jiàn)故障維修。
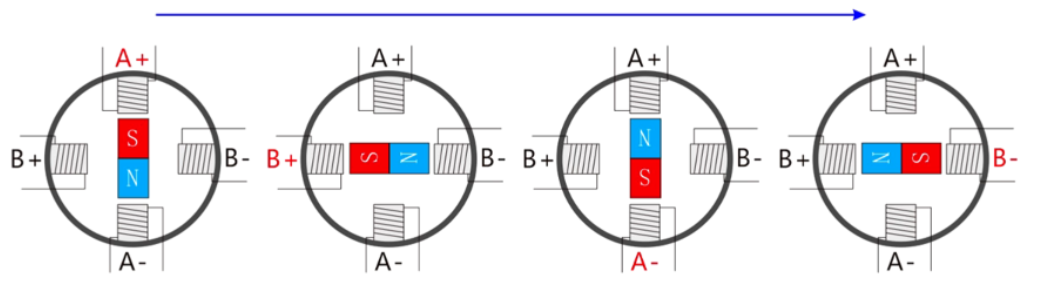
2020-04-20 09:23:0817844 從步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)原理可以得出,要使步進(jìn)電機(jī)正常運(yùn)行,必須按規(guī)律控制步進(jìn)電機(jī)的每一相繞組得電。
2021-07-16 11:46:447698 
步進(jìn)電機(jī)的原理與驅(qū)動(dòng)綜述
2021-08-12 09:47:0123 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),步進(jìn)電動(dòng)機(jī)和步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器構(gòu)成步進(jìn)電機(jī)驅(qū)動(dòng)系統(tǒng)。 步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)系統(tǒng)的性能,不但取決于步進(jìn)電動(dòng)機(jī)自身的性能,也取決于步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器的優(yōu)劣
2021-10-02 18:10:0010884 。二、步進(jìn)電機(jī)驅(qū)動(dòng)方式單極性 (unipolar) 和雙極性 (bipolar) 是步進(jìn)電機(jī)最常采用的兩種驅(qū)動(dòng)架構(gòu)。1.單極性驅(qū)動(dòng)電路使用四顆晶體管來(lái)驅(qū)動(dòng)步進(jìn)電機(jī)的兩組相位,電機(jī)結(jié)構(gòu)則如圖1...
2021-11-17 10:36:0213 當(dāng)時(shí)做的一個(gè)簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)實(shí)驗(yàn),僅供參考。文章目錄第1章 實(shí)驗(yàn)?zāi)康?.2 實(shí)驗(yàn)原理1.2.1 步進(jìn)電機(jī)原理1.2.2 步進(jìn)電機(jī)分類1.2.3 步進(jìn)電機(jī)勵(lì)磁方式1.2.4 驅(qū)動(dòng)問(wèn)題第2章 實(shí)驗(yàn)設(shè)計(jì)
2021-11-20 16:06:0129 步進(jìn)電機(jī)的應(yīng)用非常廣泛,在各種設(shè)備中經(jīng)常會(huì)遇到,而步進(jìn)電機(jī)的驅(qū)動(dòng)則是使用步進(jìn)電機(jī)必不可少的部分,可以有多種方式來(lái)實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng),在這里我們來(lái)考慮一下基于TMC2660驅(qū)動(dòng)芯片的步進(jìn)電機(jī)驅(qū)動(dòng)。
2022-12-14 16:17:508212 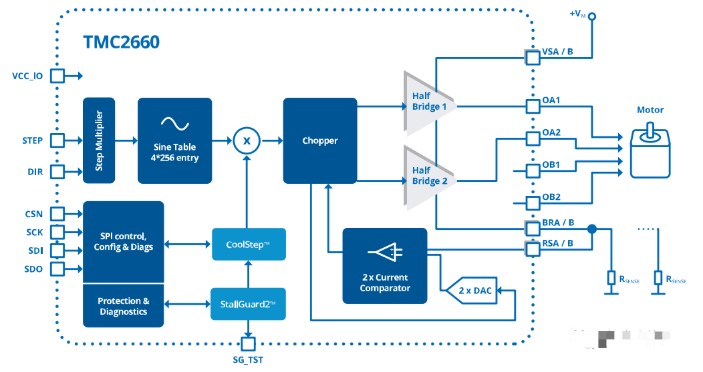
繼上一篇“兩相雙極步進(jìn)電機(jī)的驅(qū)動(dòng)”之后,本文將從兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)電路,兩相單極步進(jìn)電機(jī)的兩相勵(lì)磁PWM驅(qū)動(dòng)波形兩個(gè)方面來(lái)介紹“兩相單極步進(jìn)電機(jī)的驅(qū)動(dòng)”。如欲了解有關(guān)雙極步進(jìn)電機(jī)和單極步進(jìn)電機(jī)之間差異的更多信息,請(qǐng)參考這里。
2023-02-24 09:51:114501 
到目前為止,我們已經(jīng)介紹了步進(jìn)電機(jī)的結(jié)構(gòu)和步進(jìn)電機(jī)的驅(qū)動(dòng)方法。本文在表格中簡(jiǎn)要匯總了步進(jìn)電機(jī)的特征及步進(jìn)電機(jī)應(yīng)用。
2023-02-24 09:51:122288 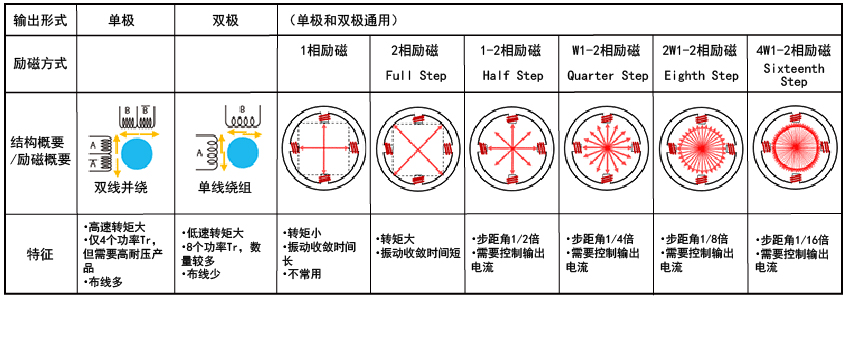
最簡(jiǎn)單的步進(jìn)電機(jī)驅(qū)動(dòng)方法是單相雙極驅(qū)動(dòng)方式,也稱為雙相步進(jìn)驅(qū)動(dòng)方式。該方式只需要使用一個(gè) H橋驅(qū)動(dòng)器和一個(gè)脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動(dòng)控制。
2023-03-08 14:21:5616851 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種電子設(shè)備,用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)和運(yùn)動(dòng),其主要原理是將控制信號(hào)轉(zhuǎn)換為電機(jī)的驅(qū)動(dòng)信號(hào)。
2023-03-08 14:30:535123 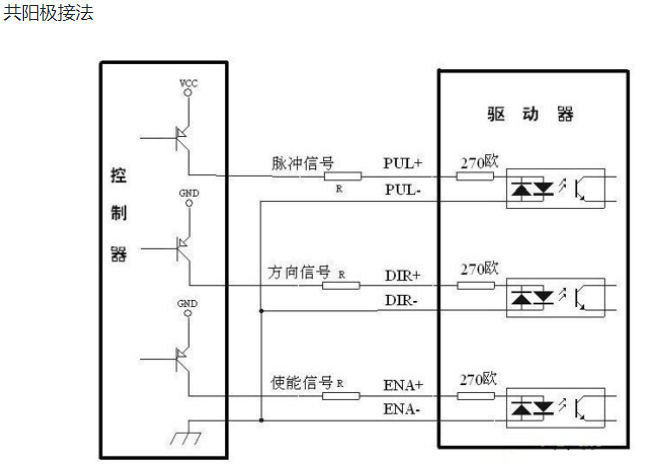
步進(jìn)電機(jī)是一種特殊的電機(jī),可以通過(guò)輸入脈沖信號(hào)來(lái)控制它的位置和運(yùn)動(dòng)。步進(jìn)電機(jī)通常由電機(jī)本體和驅(qū)動(dòng)電路組成,驅(qū)動(dòng)電路負(fù)責(zé)將輸入的脈沖信號(hào)轉(zhuǎn)換為電機(jī)的運(yùn)動(dòng)控制信號(hào)。
2023-03-08 14:33:335285 步進(jìn)電機(jī)驅(qū)動(dòng)器原理 步進(jìn)電機(jī),也稱為步進(jìn)式電動(dòng)機(jī),是一種極具特色的電動(dòng)機(jī),它既可以實(shí)現(xiàn)位移控制,又具有高精度、高響應(yīng)速度、可靠的特點(diǎn),廣泛應(yīng)用于工業(yè)控制、汽車控制、醫(yī)療設(shè)備、儀器儀表、機(jī)器人以及
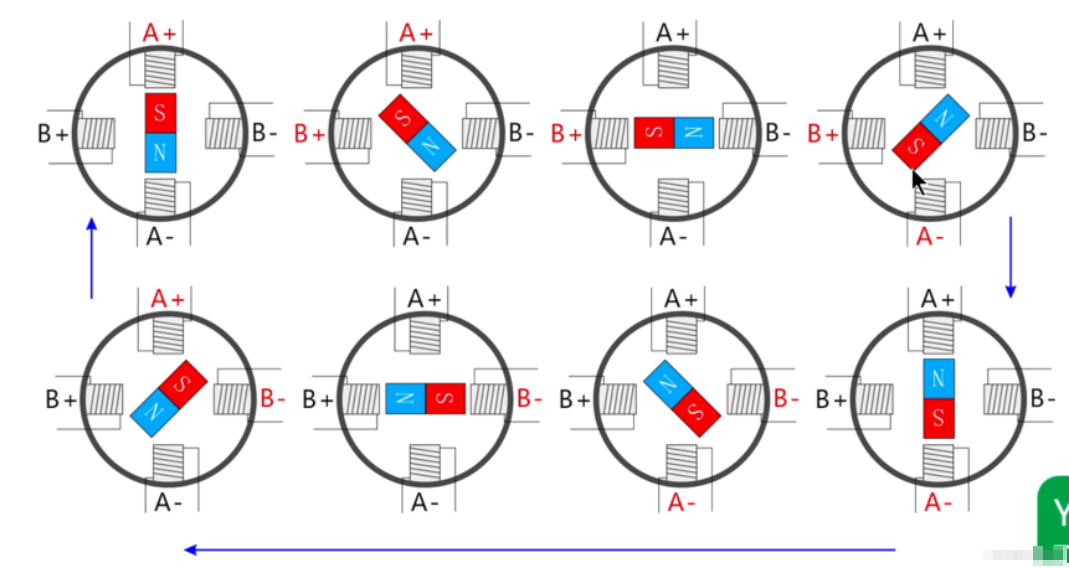
2023-03-14 14:12:518163 步進(jìn)電機(jī)相比普通直流電機(jī)來(lái)說(shuō)模型結(jié)構(gòu)方面更加復(fù)雜,比如步進(jìn)電機(jī)沒(méi)有設(shè)計(jì)直流電機(jī)用于切換電流方向的換向器,這一設(shè)
計(jì)致使步進(jìn)電機(jī)轉(zhuǎn)子無(wú)法同直流電機(jī)那樣接入直流電源立馬開(kāi)始運(yùn)動(dòng),這需要我們輪流控制步進(jìn)電機(jī)的多個(gè)線圈使磁場(chǎng)旋轉(zhuǎn)起
來(lái)從而驅(qū)動(dòng)電機(jī)轉(zhuǎn)子運(yùn)動(dòng)。所以控制步進(jìn)電機(jī)線圈磁場(chǎng)就是所謂的步進(jìn)電機(jī)驅(qū)動(dòng)。
2023-03-16 09:28:418 步進(jìn)電機(jī)每輸入一個(gè)脈沖信號(hào),轉(zhuǎn)子就轉(zhuǎn)動(dòng)一個(gè)角度或前進(jìn)一步,其輸出的角度輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。它的驅(qū)動(dòng)方式也比普通的有刷直流電機(jī)復(fù)雜。 本節(jié)我們就來(lái)講講步進(jìn)電機(jī)最基礎(chǔ)的驅(qū)動(dòng)方式
2023-03-16 09:28:427 采用STM32驅(qū)動(dòng)28BYJ4步進(jìn)電機(jī),實(shí)現(xiàn)正轉(zhuǎn)反轉(zhuǎn),完成角度調(diào)整。步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電
機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)------一個(gè)
2023-03-16 10:29:3622 之前小白白寫(xiě)過(guò)一篇步進(jìn)電機(jī)驅(qū)動(dòng)基礎(chǔ),講了最基本的步進(jìn)電機(jī)驅(qū)動(dòng)方法: 步進(jìn)電機(jī)驅(qū)動(dòng)基礎(chǔ)_xiaobaibai_2021的博客-CSDN博客_步進(jìn)電機(jī)驅(qū)動(dòng) 這里,接著以前的文章,再講一些步進(jìn)電機(jī)驅(qū)動(dòng)相關(guān)
2023-03-20 10:45:5516 四相/四線兩相(兩種型號(hào)的步進(jìn)電機(jī)驅(qū)動(dòng)器不能通用,所以購(gòu)買(mǎi)驅(qū)動(dòng)器之前要確定型號(hào)) 2.電機(jī)尺寸: 3.重量: 4.帶載能力: 5.驅(qū)動(dòng)電流:行業(yè)內(nèi)步進(jìn)電機(jī)的額定電流都是指電流峰值,實(shí)際工作電流不一定是額定電流驅(qū)動(dòng),42步進(jìn)電機(jī)及以 下尺寸一般小于1A;
2023-03-20 14:22:2711 電機(jī)(俗稱42步進(jìn)電機(jī))。假如您想要用Arduino擴(kuò)展板來(lái)驅(qū)動(dòng)直流電機(jī)或28BYJ-48步進(jìn)
電機(jī),我們推薦您使用AFMotor電機(jī)擴(kuò)展板。
CNC擴(kuò)展板可以支持A4988、DRV8825等步進(jìn)電機(jī)驅(qū)動(dòng)板。本教程頁(yè)面主要介紹如何使用A4988驅(qū)動(dòng)板來(lái)配合CNC擴(kuò)展板使
用。
2023-03-20 13:47:444 根據(jù)我讀的《步進(jìn)電機(jī)應(yīng)用技術(shù)》這本書(shū),進(jìn)行的學(xué)習(xí)過(guò)程中的知識(shí)記錄和心得體會(huì)的記錄。
前言
基本信息
前言說(shuō)明
三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路
三相電機(jī)的驅(qū)動(dòng)方式
三相步進(jìn)電機(jī)用驅(qū)動(dòng)器 I C IC IC
2023-03-20 11:46:3514 本章介紹步進(jìn)電機(jī)的主要驅(qū)動(dòng)方式和控制方法。步進(jìn)電機(jī)性能除了電機(jī)本體外,還會(huì)根據(jù)驅(qū)動(dòng)方式和控制方法不同而受到很大影響。選擇步進(jìn)電機(jī)的時(shí)候,同時(shí)要著重考慮驅(qū)動(dòng)方式和控制方法。
2023-03-20 10:52:308 ,驅(qū)動(dòng)器價(jià)格昂貴,一般一些特殊場(chǎng)景才會(huì)使用。 1. 為什么叫20283539425786步進(jìn)電機(jī)?看圖說(shuō)話最好使,所謂57就是指的電機(jī)的端蓋外形尺寸是57mm的正方形(不同電
2023-03-21 15:22:014 今天來(lái)簡(jiǎn)單測(cè)試一下用STM32驅(qū)動(dòng)步進(jìn)電機(jī)。
方法是通過(guò)STM32控制A4988模塊來(lái)驅(qū)動(dòng)步進(jìn)電機(jī)。A4988 是一款帶轉(zhuǎn)換器和過(guò)流保護(hù)的 DMOS 微步進(jìn)電機(jī)驅(qū)動(dòng)器,它用于操作雙極步進(jìn) 電機(jī),在
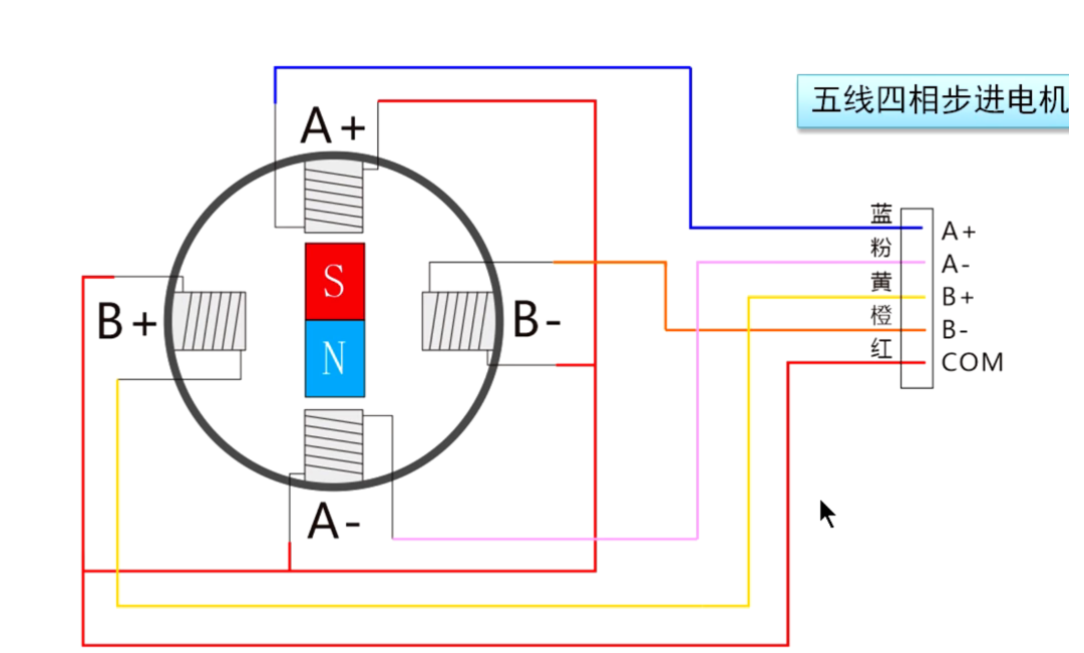
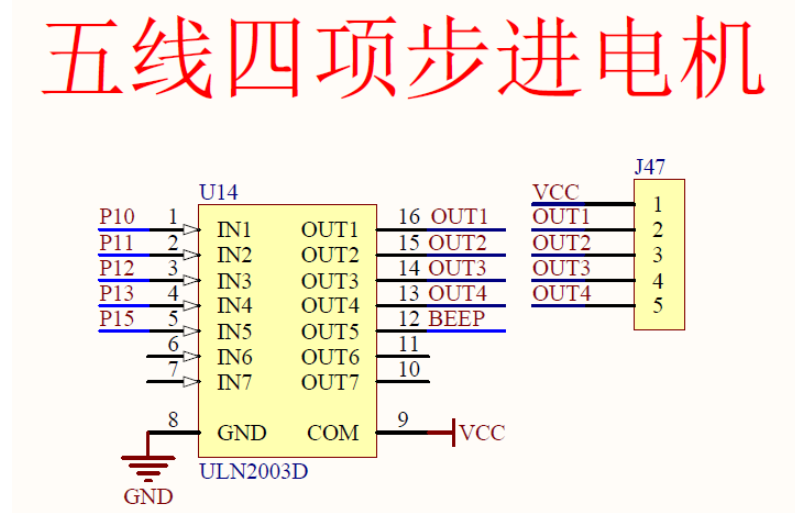
2023-03-21 11:02:3721 五線四相步進(jìn)電機(jī)驅(qū)動(dòng)測(cè)試程序(2個(gè)步進(jìn)電機(jī))
2023-03-22 14:18:409 搞懂步進(jìn)電機(jī)特性、原理及驅(qū)動(dòng)器設(shè)計(jì)_不脫發(fā)的程序猿-CSDN博客>
2.PWM基礎(chǔ)知識(shí) [CSDN]< PWM原理 PWM頻率與占空比詳解Z小旋-CSDN博客pwm>
2023-03-22 09:57:470 28BYJ-48步進(jìn)電機(jī)空載耗電在50mA一下,帶64倍減速器,輸出力矩比較大,可以驅(qū)動(dòng)重負(fù)載,極適合開(kāi)發(fā)板使用。注意:此款步進(jìn)電機(jī)帶有64倍減速器,與不帶減速器的步進(jìn)電機(jī)相比,轉(zhuǎn)速顯得 緩慢,為
2023-03-23 10:43:382 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,這個(gè)固定的角度被稱為“步距角”。步進(jìn)電機(jī)不能直接接到直流或交流電
2023-11-14 08:07:324268 
,還能輕松驅(qū)動(dòng)步進(jìn)電機(jī)。本文將詳細(xì)介紹Arduino驅(qū)動(dòng)步進(jìn)電機(jī)的原理、方法和應(yīng)用。 步進(jìn)電機(jī)基礎(chǔ)知識(shí) 1.1 步進(jìn)電機(jī)概述 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為機(jī)械位移的電動(dòng)機(jī)。與直流電機(jī)相比,步進(jìn)電機(jī)具有定位精度高、扭矩大、響應(yīng)速度快等
2024-01-14 16:37:375250 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見(jiàn)的電機(jī)驅(qū)動(dòng)裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器的撥碼開(kāi)關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個(gè)詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動(dòng)器撥碼開(kāi)關(guān)
2024-01-15 13:56:456801 步進(jìn)電機(jī)驅(qū)動(dòng)電路原理是指通過(guò)特定的電信號(hào)驅(qū)動(dòng)步進(jìn)電機(jī)工作的原理。而步進(jìn)電機(jī)驅(qū)動(dòng)器是將驅(qū)動(dòng)電路封裝成一個(gè)整體,便于直接使用和連接的設(shè)備。在本文中,我將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動(dòng)電路原理。 一、步進(jìn)電機(jī)驅(qū)動(dòng)
2024-01-24 10:46:144745 步進(jìn)電機(jī)驅(qū)動(dòng)器是一種常見(jiàn)的電動(dòng)驅(qū)動(dòng)裝置,廣泛應(yīng)用于各種自動(dòng)化設(shè)備中。在使用步進(jìn)電機(jī)驅(qū)動(dòng)器的過(guò)程中,正確的參數(shù)設(shè)置和及時(shí)的故障維修是非常重要的。本文將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動(dòng)器的參數(shù)設(shè)置和常見(jiàn)故障的維修
2024-01-24 11:30:1112629 步進(jìn)電機(jī)驅(qū)動(dòng)芯片衰減模式是指在步進(jìn)電機(jī)運(yùn)行過(guò)程中,驅(qū)動(dòng)芯片通過(guò)逐漸減小輸出電流的大小,使電機(jī)逐漸減速并停止旋轉(zhuǎn)的一種控制模式。
2024-04-08 15:06:383096 步進(jìn)電機(jī)作為一種能夠?qū)崿F(xiàn)精確位移控制的電機(jī)類型,在工業(yè)自動(dòng)化、精密測(cè)量、數(shù)控機(jī)床等領(lǐng)域得到了廣泛應(yīng)用。然而,步進(jìn)電機(jī)本身并不能直接接受控制信號(hào)進(jìn)行工作,而是需要依賴驅(qū)動(dòng)器來(lái)驅(qū)動(dòng)其運(yùn)行。本文將詳細(xì)探討為什么步進(jìn)電機(jī)需要加驅(qū)動(dòng)器,并從步進(jìn)電機(jī)的工作原理、控制需求、驅(qū)動(dòng)器的作用及特點(diǎn)等方面進(jìn)行深入分析。
2024-06-05 17:30:323574 步進(jìn)電機(jī)驅(qū)動(dòng)器是步進(jìn)電機(jī)系統(tǒng)中的重要組成部分,它負(fù)責(zé)將控制信號(hào)轉(zhuǎn)換為步進(jìn)電機(jī)所需的電流和電壓,以驅(qū)動(dòng)電機(jī)進(jìn)行精確的角度或線性位移。正確選擇步進(jìn)電機(jī)驅(qū)動(dòng)器對(duì)于保證步進(jìn)電機(jī)系統(tǒng)的正常運(yùn)行、提高控制精度
2024-06-05 18:04:303944 步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分調(diào)整是步進(jìn)電機(jī)控制系統(tǒng)中的一個(gè)重要環(huán)節(jié),它直接影響到步進(jìn)電機(jī)的運(yùn)行精度和穩(wěn)定性。本文將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分的概念、原理、方法和注意事項(xiàng)。 一、步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分的概念 步進(jìn)
2024-06-12 09:40:104975 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為機(jī)械角位移的執(zhí)行元件,廣泛應(yīng)用于自動(dòng)化設(shè)備、機(jī)器人、打印機(jī)等領(lǐng)域。步進(jìn)電機(jī)驅(qū)動(dòng)器是步進(jìn)電機(jī)的控制裝置,負(fù)責(zé)接收控制信號(hào)并驅(qū)動(dòng)步進(jìn)電機(jī)按照預(yù)定的步數(shù)和方向進(jìn)行運(yùn)動(dòng)。本文
2024-06-12 09:41:513725 步進(jìn)電機(jī)驅(qū)動(dòng)芯片是步進(jìn)電機(jī)控制系統(tǒng)中實(shí)現(xiàn)驅(qū)動(dòng)電機(jī)的核心元件。它通過(guò)接收外部控制電路提供的控制信號(hào),將其轉(zhuǎn)換為步進(jìn)電機(jī)所需的電流和電壓信號(hào),從而實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)的精確控制。本文旨在詳細(xì)闡述步進(jìn)電機(jī)驅(qū)動(dòng)芯片的工作原理及其特點(diǎn),并結(jié)合相關(guān)數(shù)字信息,為步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)和應(yīng)用提供參考。
2024-06-12 15:14:272961 步進(jìn)電機(jī)驅(qū)動(dòng)芯片的電流調(diào)節(jié)對(duì)于電機(jī)的性能和壽命至關(guān)重要。 一、電流調(diào)節(jié)的原理 步進(jìn)電機(jī)的工作原理 步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為機(jī)械角位移的執(zhí)行元件。其工作原理是通過(guò)控制電機(jī)內(nèi)部的線圈電流,產(chǎn)生
2024-07-13 09:44:412522 在當(dāng)今科技飛速發(fā)展的時(shí)代,馬達(dá)驅(qū)動(dòng) IC 和步進(jìn)電機(jī)驅(qū)動(dòng) IC 正以令人矚目的速度不斷演進(jìn)。其中,集成了先進(jìn)的無(wú)刷直流控制板方案的馬達(dá)驅(qū)動(dòng) IC 與步進(jìn)電機(jī)驅(qū)動(dòng) IC 更是成為了行業(yè)內(nèi)的焦點(diǎn)
2024-10-21 17:55:491074 
步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換為角位移或線位移的電機(jī),廣泛應(yīng)用于各種自動(dòng)化控制系統(tǒng)中。為了提高步進(jìn)電機(jī)的性能,自適應(yīng)控制和細(xì)分驅(qū)動(dòng)控制是兩種重要的技術(shù)手段。 一、步進(jìn)電機(jī)的自適應(yīng)控制 自適應(yīng)控制
2024-10-23 10:04:382253 步進(jìn)電機(jī),別名脈沖馬達(dá),是一種將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制電機(jī)。它是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,廣泛應(yīng)用于數(shù)控機(jī)床、智能儀器和自動(dòng)控制等領(lǐng)域。步進(jìn)電機(jī)的工作原理是利用電子電路,將直流電變成分時(shí)供電的多相時(shí)序控制電流,從而驅(qū)動(dòng)步進(jìn)電機(jī)工作。
2024-12-29 09:41:471713  電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論