") 步進(jìn)電機(jī)驅(qū)動(dòng)器的三種驅(qū)動(dòng)模式
步進(jìn)電機(jī)驅(qū)動(dòng)器的三種驅(qū)動(dòng)模式

步進(jìn)電機(jī)驅(qū)動(dòng)器主要是區(qū)別在于步進(jìn)電機(jī)線圈電流的控制精度。主要有三種驅(qū)動(dòng)模式:
1.細(xì)分驅(qū)動(dòng)模式
細(xì)分驅(qū)動(dòng)模式有兩大優(yōu)點(diǎn):低速振動(dòng)極小和定位精度高。對(duì)于需要低速運(yùn)行或定位精度要求小于0.90度的步進(jìn)電機(jī),步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分驅(qū)動(dòng)模式獲得了廣泛使用。工作原理是對(duì)電機(jī)的兩個(gè)線圈分別按正弦和余弦形的臺(tái)階進(jìn)行精密電流控制,從而使得一個(gè)步距角的距離分成若干個(gè)細(xì)分步完成。
2.整步驅(qū)動(dòng)模式
在整步驅(qū)動(dòng)模式運(yùn)行當(dāng)中,相同的步進(jìn)電機(jī)既能配整步驅(qū)動(dòng)器或半步驅(qū)動(dòng)器也可以配細(xì)分驅(qū)動(dòng)器,但是其所運(yùn)行效果的不同。步進(jìn)電機(jī)驅(qū)動(dòng)器按脈沖方向指令對(duì)兩相步進(jìn)電機(jī)的兩個(gè)線圈循環(huán)激磁,這種驅(qū)動(dòng)方式的每個(gè)脈沖將使電機(jī)移動(dòng)一個(gè)基本步距角,即1.80度 。
3.半步驅(qū)動(dòng)模式
半步驅(qū)動(dòng)模式和整步驅(qū)動(dòng)模式比起來,半步方式更具有精度高一倍和低速運(yùn)行時(shí)振動(dòng)較小的優(yōu)點(diǎn),所以在實(shí)際當(dāng)中使用整/半步驅(qū)動(dòng)器時(shí)一般都會(huì)選擇半步模式。在單相激磁時(shí),電機(jī)轉(zhuǎn)軸停至整步位置上,驅(qū)動(dòng)器收到下一脈沖后,如果給另一相激磁且保持原來相繼處在激磁狀態(tài),則電機(jī)轉(zhuǎn)軸將移動(dòng)半個(gè)步距角,停在相鄰兩個(gè)整步位置的中間。如此循環(huán)地對(duì)兩相線圈進(jìn)行單相然后雙相激磁步進(jìn)電機(jī)將以每個(gè)脈沖0.90度的半步方式轉(zhuǎn)動(dòng)。
-
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
153文章
3262瀏覽量
152634 -
步進(jìn)電機(jī)驅(qū)動(dòng)器
+關(guān)注
關(guān)注
0文章
141瀏覽量
13680
發(fā)布評(píng)論請(qǐng)先 登錄
步進(jìn)電機(jī)驅(qū)動(dòng)器的作用介紹

DRV8809/10組合電機(jī)驅(qū)動(dòng)器:集成解決方案的詳細(xì)剖析
DRV8846雙H橋步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)解析
DRV8884步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
DRV8886AT步進(jìn)電機(jī)驅(qū)動(dòng)器:特性、應(yīng)用與設(shè)計(jì)要點(diǎn)
詳解德州儀器 DRV8426 步進(jìn)電機(jī)驅(qū)動(dòng)器
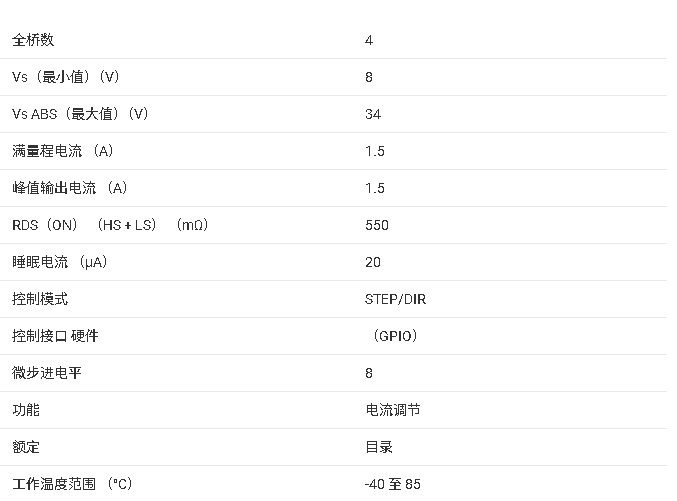
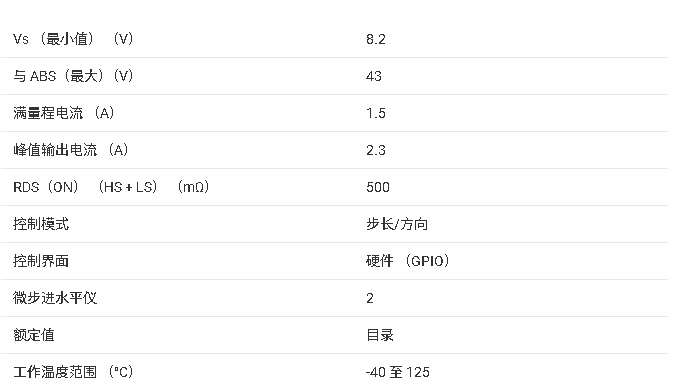
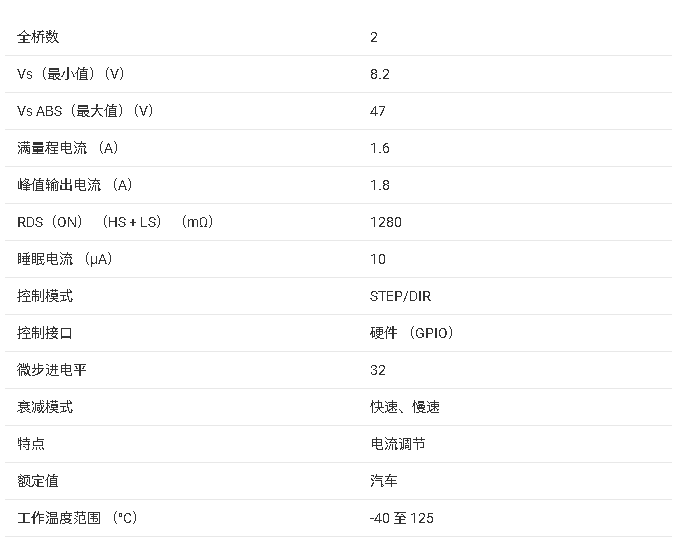
常用兩相步進(jìn)電機(jī)和驅(qū)動(dòng)器參數(shù)
HR4988微特步進(jìn)電機(jī)驅(qū)動(dòng)器:高效便捷的驅(qū)動(dòng)解決方案
?DRV8821 雙路步進(jìn)電機(jī)控制器與驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8805單極性步進(jìn)電機(jī)驅(qū)動(dòng)IC技術(shù)文檔總結(jié)
?DRV8824-Q1 汽車級(jí)步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
?DRV8818A 35V步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
步進(jìn)電機(jī)EMC整改:驅(qū)動(dòng)器與電纜整改的極速排查法
DRV8461步進(jìn)電機(jī)驅(qū)動(dòng)器技術(shù)解析與應(yīng)用指南
佳訊電子:低壓MOS在步進(jìn)電機(jī)驅(qū)動(dòng)器上的應(yīng)用




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論