增量光電編碼器基本波形和電路
?
采用旋轉式光電編碼器,把它的轉軸與重力測量儀中補償旋鈕軸相連。重力測量儀中補償旋鈕的角位移
2009-09-26 17:28:45 6443
6443 增量式光電編碼器原理及其結構
增量式光電編碼器的特點是每產生一個輸出脈沖信號就對應于
2010-06-02 22:50:4620938 、干擾造成的信號波動所有的編碼器周邊環境的干擾都會使增量型拉繩編碼器輸出信號造成干擾。所以,拉線電阻尺的輸出線與別的線束要分開布線,并應有可靠接地。如出現信號波動現象,應逐一排除干擾源。第三、輸出數值
2018-12-21 11:37:27
什么呢?1、增量拉繩編碼器有分辨率的差異,使用編碼器的線性決定了它的分辨率,脈沖數越高,分辨率越高;這是選型的重要依據之一。2、增量型編碼器通常有三路信號輸出(差分有六路信號):A,B和Z,一般采用
2018-12-24 10:25:31
本帖最后由 這般緣 于 2016-5-13 11:03 編輯
如題,我現在角度編碼器加電后A,B相用示波器看能看到波形。選的計數器卡是NI6284的,角度編碼器的A,Z,B與6284ctr0
2016-05-13 10:59:13
增量式編碼器與絕對值式編碼器的區別是什么?直流電機和交流電機的區別是什么?
2021-10-12 06:17:13
增量式編碼器輸出的脈沖波形信號形式常見的有哪幾種?增量式編碼器倍頻技術的M法究竟是怎樣測速的?
2021-11-09 07:08:29
大神們!增量式編碼器是怎樣使用的
2015-08-02 08:23:42
首先來看一下增量式編碼器的輸出信號和它的信號倍頻技術。增量式編碼器輸出的脈沖波形信號形式常見的有兩種:一種是占空比50%的方波,通道A和B相位差為90°;另一種則是正弦波這類模擬信號,通道A和B
2021-08-06 09:25:37
編碼器的使用1.1 增量式編碼器倍頻計數增量式編碼器的脈沖波形型號形式常見的有兩種:一種是占空比為50%的方波,通道A和B相位差為90°;另外一種是正弦波這類模擬信號,通道A和B相位差也是90
2021-09-01 06:58:40
,便可以達到測速的效果(v=s/t),通過對脈沖信號的累加,和編碼器的碼盤的周長(轉一圈對應距離) 便可以達到計算行走距離的效果(s=n*d)編碼器信號:A 脈沖輸出B 脈沖輸出...
2022-01-10 06:08:32
如題,我現在角度編碼器加電后A,B相用示波器看能看到波形。選的計數器卡是NI6624的,角度編碼器的A,Z,B與6624ctr0的 ,SU,GATE,AUX對接好了。可是用NI MAX的計數器功能,和labview角度編碼器的范例怎么都調試不出來。求大神賜教
2019-10-24 10:35:00
位移變化(速度)的傳感方法,它是相對于某個基準點的相對位置增量,不能夠直接檢測出軸的絕對位置信息。一般來說,增量式光電編碼器輸出A、B兩相互差 電度角的脈沖信號(即所謂的兩組正交輸出信號),從而可方便地
2020-03-16 13:33:58
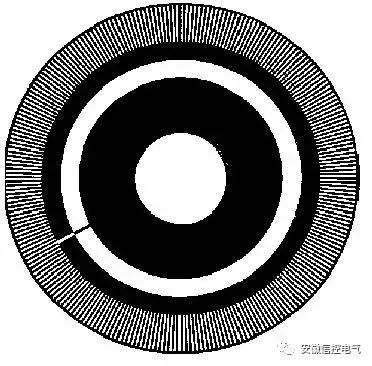
增量式光電編碼器結構和原理增量式光電編碼器結構如圖1所示。在它的編碼盤邊緣等間隔地制出n個透光槽。發光二極管(LED)發出的光透過槽孔被光敏二極管所接收。當碼盤轉過1/n圈時,光敏二極管即發出一個
2016-09-12 13:43:01
閱讀目錄一、增量式旋轉編碼器二、硬件設計三、軟件設計Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉編碼器1、簡介編碼器
2021-12-01 07:57:34
A、B相是4分頻的,增量編碼器是相對編碼方式,Z相作為參考位置。對編碼器脈沖進行計數。得到的計數值可以通過公式自己轉換成旋轉角度值,程序里面沒有給出。
2013-09-11 14:26:11
實際上就是光電編碼器,分為增量式和絕對式,較其它檢測元件有直接輸出數字量信號,慣量低,低噪聲,高精度,高分辨率,制作簡便,成本低等優點。增量式編碼器結構簡單,制作容易,一般在碼盤上刻A、B、Z三道
2012-02-24 22:03:25
一、編碼器的分類根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式,根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。1、增量式編碼器 增量式編碼器是直接利用光電轉換原理輸出三
2022-01-20 06:47:46
、絕對式以及混合式三種。 1.1 增量式編碼器 增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點
2017-11-24 19:00:47
,會停止在最大或最小限位點;增量型旋轉編碼器可向任意轉向進行無限旋轉。增量型旋轉編碼器采用正交編碼器生成其A和B的輸出信號。從A和B輸出發射的脈沖是正交編碼的,這意味著當增量編碼器以恒定速度運動時,A
2022-11-30 08:56:57
本帖最后由 美麗時光2017 于 2017-6-7 11:35 編輯
自己寫的小模塊,不足之處敬請指教!/*編碼器輸入模塊(增量型A,B,Z)*/module ENCODER(input
2017-06-07 11:35:25
。本文講述常見的增量式編碼器,增量式編碼器也可以叫正交編碼器,也就是說可以通過其A、B的相位知道編碼器是正轉,還是反轉,還可以根據編碼器參數得出旋轉了多少角度等。常見的增量式編碼器A、B、Z三根線代表
2020-05-28 08:00:00
` 本帖最后由 YSHL2016 于 2016-9-28 08:44 編輯
在simulink中的matlab function寫的增量式編碼器仿真模型。模型輸入為電機模型輸出的機械角度thet
2016-09-28 08:34:22
stm32 的Encoder 使用增量式編碼器在實際應用中還是很常見。stm32的定時器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來計數,z相輸出零點信號。AB相根據旋轉的方向
2021-08-04 08:11:00
續位移量離散化或增量化以及位移變化(速度)的傳感方法,它相對于某個基準點的相對位置增量,不能夠直接檢測出軸的絕對位置信息。一般來說,增量式光電編碼器輸出A、B兩相互差90讀電角度的脈沖信號(也即是兩組正交
2021-05-17 13:20:52
5腳增量式旋轉編碼器,想測轉角和轉數,完全沒有頭緒,接線也有疑問,知道怎么弄的快來!!
2016-08-28 11:53:30
,用脈沖的個數表示位移的大小。絕對式編碼器的每一個位置對應一個確定的數字碼,因此它的示值只與測量的起始和終止位置有關,而與測量的中間過程無關。 1、增量式 增量式編碼器通常有3個輸出口,分別為A相、B相
2016-06-27 16:43:31
對這些脈沖進行跟蹤或計數。圖 2:增量編碼器產生具有 90° 相位差的脈沖波形。(圖片來源:CUI, Inc.)增量編碼器的分辨率以每轉脈沖數 (PPR) 表示,相當于任一方波輸出的高脈沖數。您可以閱讀
2018-12-20 16:31:09
做到多圈旋轉位置測量。增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相。由一個中心有軸的光電碼盤,其上有環形通、暗的刻線,有光電發射和接收器件讀取,獲得兩組正弦波信號組合成A、B,每個
2023-04-20 16:19:54
那個增量式編碼器輸出的信號然后怎么通過無線模塊發射出去
2012-04-17 23:31:38
,不宜實現小型化。增量式光電編碼器不具有計數和接口電路,一般輸出A、B、Z脈沖信號,價格較低,在實際工程中比較常用。文中設計了一個基于FPGA的簡單且精度高的接口電路,其結構簡單、性能可靠。具有濾波
2019-06-10 05:00:08
增量 型 編 碼器是一種角位移和角速度測量元件,可以直接將角位移或角速度變成相應的脈沖序列信號,在檢測物體的位移和角度等方面有著廣泛的應用。增量型編碼器有A,B,Z三相
2008-10-19 16:49:21 46
46 ;其中RCI58B開頭的型號,說明了是增量型,外徑尺寸58mm,盲孔;RCI58B法國雷恩Precilec增量編碼器主要是用來精確測量轉軸的速度,位置在工業環境中,比
2022-06-13 09:17:26
如果要在增量型編碼器后方安裝額外的部件,就可以使用RHI 74產品線系列的增量型編碼器.為此,該旋轉編碼器使用一個安全穿過本體的空心軸套.該增量型旋轉編碼器直接安裝
2010-10-08 07:49:5545 增量編碼器是一種將旋轉位移轉換為一連串數字脈沖信號的旋轉式傳感器。這些脈沖用來控制角位移,如果編碼器與齒輪齒條或螺旋絲杠結合在一起,也可以用來測量直線位
2010-10-19 16:54:5427 什么是光電編碼器?
工作原理:當光電編碼器的軸轉動時A、B兩根線都產生脈沖輸出,A、B
2008-04-06 15:04:535050 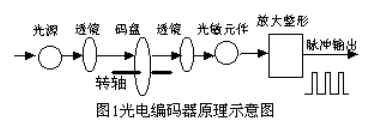
增量型編碼器相位差輸出電路
2009-04-26 12:04:362287 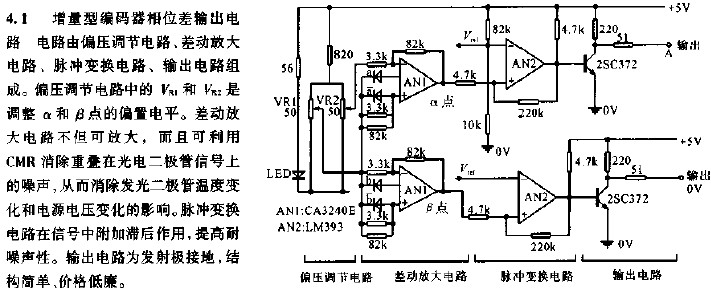
SPMC75增量編碼器接口應用
增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90o,從而可方便地判斷出旋轉方向,而Z相為每轉一
2009-09-19 10:30:071365 
如何使用增量編碼器
1,增量型旋轉編碼器有分辨率的差異,使用每圈產生的脈沖數來計量,數目從6到5400或更高,脈沖數越多,分辨
2009-09-26 17:35:044513 增量型編碼器與絕對型編碼器的區別
編碼器如以信號原理來分,有增量型編碼器,絕對型編碼器。 增 量 型 編 碼 器 (旋轉
2009-09-26 17:36:292940 增量光電編碼器基本波形和電路圖
增量編碼器是以脈沖形式輸出的傳感器,其碼盤比絕對編碼器碼盤要簡單得多
2009-10-29 22:55:063578 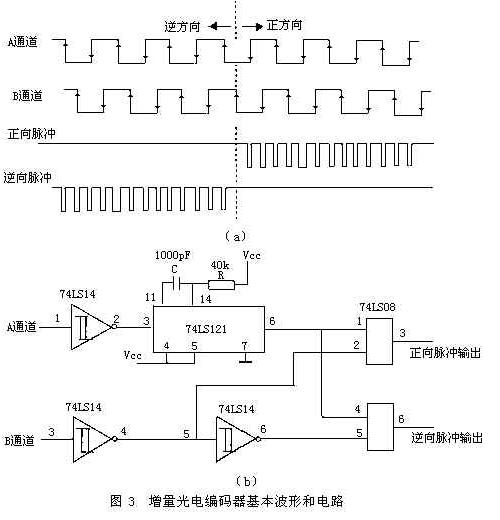
增量編碼器
增量編碼器又稱脈沖編碼器,其結構簡單,一般只有三個碼道,不能直接產生幾位編碼輸出,如圖12.3.2所示。它是一個被劃分成若干個交替透明和
2009-10-29 23:05:145371 針對目前增量式光電編碼器辨向計數電路脈沖或抖動干擾抑制能力差的問題,提出了一種基于有限狀態機的編碼器接口電路設計方案,并給出了硬件實現。首先將光電編碼器輸出的A、
2011-09-07 14:52:07169 分析機械式增量型編碼器的毛刺產生機理,結合編碼器有效旋轉波形和幾種毛刺波形的特點,提出一種新的去毛刺算法,在編碼器的相位超前輸出端的下降沿,判斷一次相位滯后端的輸
2011-09-07 14:59:5480 分析了光電編碼器4倍頻原理,提出了一種基于可編程邏輯器件FPGA對光電增量式編碼器輸出信號4倍頻、鑒相、計數的具體方法,它對提高編碼器分辨率與實現高精度、高穩定性的信號檢測
2011-11-03 15:13:1676 增量型編碼器就是每轉過單位的角度就發出一個脈沖信號(也有發正余弦信號,然后對其進行細分,斬波出頻率更高的脈沖),通常為A相、B相、Z相輸出,A相、B相為相互延遲1/4周期的脈沖輸出,根據延遲關系可以
2017-10-23 10:31:563 型編碼器,可將旋轉編碼器的輸出脈沖信號直接輸入給PLC,利用PLC的高速計數器對其脈沖信號進行計數,以獲得測量結果。不同型號的旋轉編碼器,其輸出脈沖的相數也不同,有的旋轉編碼器輸出A、B、Z三相脈沖,有的只有A、B相兩相,最簡單的
2017-10-25 09:47:3219 增量式光電編碼器輸出 A、B 兩相相位差為 90°的脈沖信號(即所謂的兩相正交輸出信號),根據 A、B 兩相的先后位置關系,可以方便地判斷出編碼器的旋轉方向。另外,碼盤一般還提供用作參考零位的 N 相標志(指示)脈沖信號,碼盤每旋轉一周,會發出一個零位標志信號。
2018-03-26 15:24:5410480 關鍵詞:旋轉編碼器 旋轉編碼器分類 根據檢測原理,旋轉編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。 1.1增量式編碼器 增量式編碼器
2019-03-29 15:15:035294 增量型編碼器通常有三路信號輸出(差分有六路信號):A,B和Z,一般采用TTL電平,A脈沖在前,B脈沖在后,A,B脈沖相差90度,每圈發出一個Z脈沖,可作為參考機械零位。一般利用A超前B或B超前A進行
2019-04-11 17:36:0522290 首先,對一臺同型號且完好的伺服電機裝配的9根線編碼器進行測量,得到如圖2所示波形。分析得知,a、b信號的波形與15線編碼器a、b信號的波形相同,而X信號為圖3所示。
2019-10-31 10:10:014919 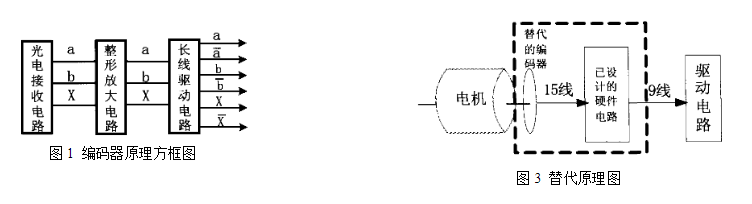
本文主要闡述了增量式編碼器與絕對式編碼器的區別。
2019-11-06 14:56:4064813 首先在增量式編碼器安裝設備之前需要的是要對周邊環境做一個系統的清潔,設備周圍的環境都需注意做好相對應的清潔措施。這樣可以更好保證編碼器的工作運行。常用的增量式編碼器與一般的設備的電機軸有兩種的安裝
2019-11-06 15:20:558889 絕對編碼器這是能將電動機一轉內的角度數據輸出到外部目標的檢測器。絕對編碼器一般能夠以8到12位輸出360 °絕對值編碼器與增量編碼器工作原理非常相似。
2019-12-04 11:06:1831425 光電增量編碼器的工作原理是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便地判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位。
2020-03-22 16:48:0014559 增量式旋轉編碼器沒有固定的起始零點,輸出的是與轉角的增量成正比的脈沖,需要用計數器來計脈沖數。
2020-03-21 11:43:3312060 增量式編碼器 增量式編碼器是直接利用光電轉換原理輸出三組方波脈沖A、B和Z相;A、B兩組脈沖相位差90度,從而可方便的判斷出旋轉方向,而Z相為每轉一個脈沖,用于基準點定位。
2020-10-15 11:14:0810356 我們通常用的是增量型編碼器,可將旋轉編碼器的輸出脈沖信號直接輸入給plc,利用PLC的高速計數器對其脈沖信號進行計數,以獲得測量結果。不同型號的旋轉編碼器,其輸出脈沖的相數也不同,有的旋轉編碼器輸出A、B、Z三相脈沖,有的只有A、B相兩相,最簡單的只有A相。
2021-04-04 16:56:0016337 相編碼器,PLC可以很容易地識別出轉軸旋轉的方向。增量編碼器方向的改變主要是看A、B輸入的波形符合下圖那種情況。
2021-05-13 15:24:0231365 
, 說明如何添加增量型旋轉編碼器的驅動,本文不對驅動操作硬件的實現細節進行說明。 增量型旋轉編碼器硬件要點 本文使用的是KY-040旋轉編碼器,詳細信息見文末參考 button引腳是一個對地的開關,按壓時接地 旋轉時A/B輸出有相差的正交脈沖。 旋轉一圈產生
2021-07-28 09:55:283225 閱讀目錄一、增量式旋轉編碼器二、硬件設計三、軟件設計Development kit:MDK5.14IDE:UV4MCU:STM32F103C8T6回到頂部一、增量式旋轉編碼器1、簡介編碼器
2021-11-22 20:06:0347 上一個博文介紹了編碼器實現測試,這也是編碼器最普遍的應用,我們需要操作的東西并不多,通常來說記錄脈沖數。STM32操作增量式編碼器(一)----使用外部中斷實現測速1.增量式編碼器實現定位思路對于
2021-12-08 16:36:0742 CC1581系列CARLEN增量編碼器 產品特點:
· 通用工業旋轉編碼器,具有A,B,Z,/A,/B,/Z多向增量信號
· 最大脈沖每轉? 80000 ppr
· 強抗震動,抗干擾;
· 信號精度高
· 入口防護等級高達? IP67
· 工作溫度:-30℃至100℃
2021-12-23 09:26:594703 以增量編碼器為例進行相關說明。原理:每轉過單位的角度就發出一個脈沖信號(或者是正弦信號),通常為對外輸出為A
2021-12-31 18:53:2612 根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式,根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。
2022-12-15 14:17:1410548 增量式編碼器在實際應用中還是很常見。stm32的定時器帶的也有編碼器模式。所用的編碼器是有ABZ三相,其中ab相是用來計數,z相輸出零點信號。AB相根據旋轉的方向不同,輸出的波形如下圖所示。
2023-01-19 09:14:0012220 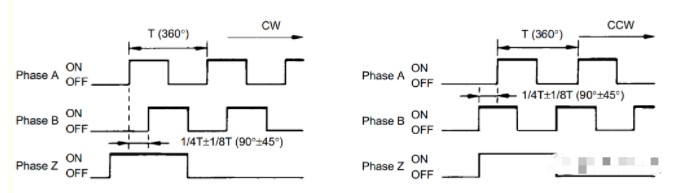
增量式編碼器是能夠依據旋轉運動形成信號的編碼器,其刻度方式為每一個脈沖都進行增量測算,因此得名。是能夠依據旋轉運動形成信號的編碼器,其刻度方式為每一個脈沖都進行增量測算,因此得名。
2023-02-16 17:37:406487 增量式編碼器和絕對值編碼器哪個好? 編碼器是伺服系統上的重要組成部分,可以發送脈沖給驅動器,用于運動位置的矯正,實現閉環控制。目前,常見的伺服編碼器類型有增量式編碼器以及絕對值編碼器兩種,它們哪個
2023-03-19 23:30:035102 隨著工業4.0發展需求,工業機器人產業前所未有的崛起,現在在機器人控制系統中,伺服電機扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我帶大家認識一下絕對編碼器與增量編碼器。
2023-03-28 09:33:311612 隨著工業4.0發展需求,工業機器人產業前所未有的崛起,現在在機器人控制系統中,伺服電機扮演者重要角色,這樣一來編碼器重要性尤為突出,下面讓我帶大家認識一下絕對編碼器與增量編碼器。
2023-03-28 09:27:191719 有沒有編碼器結構是區別于伺服系統和普通電機的第一要素,它可以讓電機實現閉環控制,讓其有更高的控制精度,應對更為苛刻的控制項目。目前,最為常見的伺服編碼器主要有增量式和絕對值式兩大類,它們的不同在
2023-04-12 09:05:027306 增量式編碼器一般分為3種類型:單通道增量式編碼器,雙通道增量式編碼器,三通道增量式編碼器。
2023-04-17 09:43:148896 在不同的工作領域和工作中,需要使用對應的工具和產品。在處理具有旋轉角度編碼器的工作任務時,了解所需工具的類型是必要的。除了絕對值編碼器外,還有增量式編碼器,二者有什么區別呢?有什么特征、適合什么樣的應用呢?這邊文章給您答案
2023-05-26 10:51:402932 大孔徑增量編碼器RCI90P系列,主要產品特點:大孔徑編碼器產品分辨率最大可達10000ppr,支持HTL和TTL輸出,擁有孔徑65mm,? 60mm ,50mm, 45mm 。通訊接口:SSI
2022-07-12 14:17:383781 
增量式編碼器是能夠依據旋轉運動形成信號的編碼器,其刻度方式為每一個脈沖都進行增量測算,因此得名。它常與機械設備轉換裝置搭配使用(如齒條-齒輪、精確測量輪或心軸搭配使用),用以精確測量直線運動。增量式編碼器是把位移轉換成周期性的電信號,然后把這個電信號轉化成計數脈沖,用脈沖的個數表示位移的大小。
2023-04-17 15:39:054085 
增量型編碼器與絕對值型編碼器怎么選擇?在進行編碼器選擇時,增量型編碼器和絕對值型編碼器是兩種常見的選擇。增量型編碼器是一種基于脈沖計數的編碼器,通常由光電編碼器和霍爾編碼器組成。這種編碼器的主要優點
2023-05-08 11:28:333172 
增量式編碼器和絕對值編碼器有哪些區別?增量式編碼器通過對變化量進行計數來測量位置變化,而絕對值編碼器可提供實際位置值。因此,增量式編碼器對于測量無限循環的運動比較有用,因為它們可以使用計數器來跟蹤旋轉次數和速度。相比之下,絕對值編碼器適用于任務需要直接獲得位置信息的情景,如機器人運動。
2023-07-05 13:34:285778 
增量式編碼器的分辨率是以編碼器軸轉動一周所產生的輸出信號基本周期數來表示的,即脈沖數/轉(PPR)。本文主要介紹選擇增量編碼器分辨率的方法以及影響增量式編碼器分辨率的因素。
2023-07-26 09:59:563273 當前位置的。它們通常包含兩個輸出信號通道,一個用于測量位置變化的方向,另一個用于計數脈沖。增量型編碼器的工作原理是通過計算脈沖數和方向來確定位置變化。因此,它們需要
2023-08-18 14:43:501718 
伺服電機編碼器原理伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步電機
2023-08-25 08:08:542661 
伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步電機,同步電機啟動的時候需要
2023-09-22 14:19:582370 伺服電機編碼器原理 伺服編碼器這個基本的功能與普通編碼器是一樣的,比如增量型的有A,A反,B,B反,Z,Z反等信號,除此之外,伺服編碼器還有著跟普通編碼器不同的地方,那就是伺服電機多數為同步電機
2023-09-25 14:07:173731 增量式編碼器提供了一種對連續位移量離散化、增量化以及位移變化(速度)的傳感方法。增量式編碼器的特點是每產生一個增量位移就對應于一個輸出脈沖信號。增量式編碼器測量的是相對于某個基準點的相對位置增量,而不能夠直接檢測出絕對位置信息。
2023-10-26 10:44:5111820 
? ? ? 增量式編碼器是一種將位移轉換成周期性的電信號,再把這個電信號轉變成計數脈沖的裝置,用脈沖的個數表示位移的大小。增量式編碼器沒有固定的起始零點,輸出的是與轉角的增量成正比的脈沖,需要用計數器
2024-03-05 08:43:414456 
絕對式編碼器和增量式編碼器二者有什么區別呢?分別有什么特征,適合什么樣的應用呢?歡迎閱讀文章了解~
2024-05-15 10:43:511103 
在工業自動化和精密測量領域,編碼器是不可或缺的關鍵設備。編碼器能夠將機械位移轉換為電信號,以便于計算機或其他數字系統進行處理。在編碼器的眾多類型中,增量編碼器和絕對值編碼器是兩種常見且重要的類型
2024-06-03 15:40:185230 增量式編碼器的工作原理:增量式編碼器的核心部分是碼盤,它通過旋轉來產生脈沖信號。碼盤上有一系列的條紋,這些條紋會依據旋轉的方向,根據光電傳感器產生脈沖信號。這些脈沖信號經過放大和整形后,可以輸出給控制系統使用。
2024-06-04 10:15:014509 
的編碼器類型,它通過測量電機軸的旋轉角度變化來提供位置和速度信息。增量式編碼器通常有兩個輸出信號,分別為A相和B相,它們之間存在90度的相位差。通過測量A相和B相的脈沖數,可以計算出電機的旋轉角度。 1.2 絕對式編碼器 絕對式編碼
2024-06-17 11:07:324919 電子發燒友網站提供《增量旋轉編碼器.pdf》資料免費下載
2024-09-03 11:51:146 增量編碼器與絕對值編碼器的區別:增量編碼器與絕對值編碼器在精度特點對比
增量編碼器的精度取決于脈沖的數量和測量的細分程度,通常情況下,其精度相對較低。絕對值編碼器由于可以直接讀取絕對位置,精度通常
2024-11-18 16:38:383590 
在工業自動化領域,增量式編碼器是一種常用的測量設備。殊不知,不少人在面對增量式編碼器時,經常會對單圈和多圈的類型困惑不已,不知道該如何準確區分和判斷。今天,我們就來深入探討一下這個問題,幫助您清晰
2025-01-09 16:40:161282 在選擇增量型編碼器與絕對值型編碼器時,需要考慮多個因素,包括應用需求、成本、精度、可靠性以及環境適應性等。以下是對兩種編碼器的詳細比較及選擇建議: 一、增量型編碼器 1. 優點: ? ?● 結構簡單
2025-07-10 10:34:061047 絕對值編碼器與增量式編碼器相比有哪些優勢?核心功能:斷電后位置信息不丟失,絕對值編碼器:通過機械結構或電子存儲(如電池備份),能實時輸出當前位置的唯一絕對值編碼(如二進制、格雷碼)。無論是否斷電
2025-08-11 13:57:291395 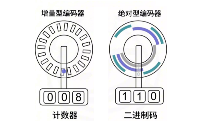
Bourns 推出 PEC04 系列 4 mm 增量式微型編碼器、PEC05 PEC05 系列 5 mm 增量式微型編碼器,以及 PEC06 型號 6 mm 增量式微型編碼器。Bourns 全新微型編碼器可提供位置與速度信息,為各類電子應用中的控制功能提供關鍵支持。
2025-09-22 16:05:071175 增量式編碼器工作原理是什么?增量式編碼器是一種通過輸出脈沖信號來反映旋轉位置變化的傳感器,廣泛應用于電機測速、位置控制等領域。其工作原理可從機械結構、信號產生、信號處理三個層面展開,增量式編碼器
2025-09-29 11:00:471884 
探索AEAT - 901B系列增量式磁編碼器:特性、應用與設計要點 在電子工程師的日常設計工作中,編碼器是實現精確運動控制和角度檢測不可或缺的關鍵組件。今天,我們就來深入探討一下Broadcom
2025-12-30 11:50:02216 探索Broadcom AEAT - 901B系列增量式磁編碼器:特性、參數與應用 在電子工程師的日常設計工作中,編碼器猶如一雙雙“電子眼睛”,為設備的運動控制和位置檢測提供關鍵信息。今天,我們就來
2025-12-30 14:05:02101
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論