在“機器換人”的時代背景下,許多企業都對工業機器人產生了濃厚的興趣,然而許多企業并不能很好的挑選到適合自己工業機器人。通過本文,希望大家能對工業機器人的選擇有一個大致的概念,可以有一個選擇的方向。
2017-01-11 19:47:11 2420
2420 基于導納控制的機器人拖動示教是一種常用的機器人控制策略,它允許人與機器人直接互動,實現自然、直觀的控制。在導納控制中,機器人被建模為一個力控制系統,其動力學特性由一個等效的導納(Admittance)模型描述。導納模型類似于彈簧和阻尼器的組合,用來描述機器人對外部力和運動的響應。
2023-12-04 09:48:338088 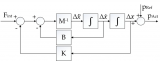
示教器顯示50204動作監控報警!有哪個對abb工業機器人熟悉的解答下
2019-04-18 00:50:07
。可以進行六軸機器人示教、定位、抓取、裝配等訓練,包含六自由度工業機器人、智能視覺檢測系統、PLC控制系統及
2021-07-01 11:48:31
模塊化,便于組合,實現對不同物料進行快速的檢測、組裝。為了方便實訓教學,系統進行了專門的設計,可以完成各類機器人單項訓練和綜合性項目訓練,可完成各類機器人單項訓練和綜合性項目訓練。可以進行六軸機器人示教、定位
2021-07-01 06:38:35
如題,我在論壇就看到有一位大神講過一本書,《工業機器人》,煩請論壇小伙伴們多多推薦更多的好書啊。。。
2015-02-03 11:02:31
工業機器人控制器功能多任務功能一臺機器人可進行多個任務的操作;
2019-09-12 09:10:22
工業機器人的控制系統的主要任務是控制工業機器人在工作空間中的運動位置、姿態和軌跡、操作順序及動作的時間等項目,主要功能有示教再現功能和運動控制功能。示教再現控制的主要內容主要包括示教及記憶方式和示教
2017-10-20 10:03:57
故障;2.ZN-IRW01工業機器人故障診斷實訓平臺可滿足現場工業機器人技術應用所需要的功能,教師可以在控制系統中去設置故障,學生可通過人機交互界面查看機器人故障提示信息,并對故障點進行檢測維修;3.可實現工業機器人的示教編程,機器人編程指令的學習。二、基本功能:本工業機器人故障診斷實訓系統以工業機器
2021-07-01 12:32:12
工業機器人的定義是什么?有哪些特點?工業機器人有哪幾個子系統組成?各自的作用是什么?工業機器人的主要技術參數有哪些?
2021-07-05 07:20:36
%和 15%左右。(資料來源:克來機電(603960,診股)招股說明書).1. 核心零部件工業機器人的核心零部件包括減速機、伺服電機和控制器等。減速機減速機將電動機、內燃機等高速運轉的動力通過輸入軸上
2017-08-23 15:10:27
機器人技術是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域。機器人應用情況,是一個國家工業自動化水平的重要標志。
2020-03-27 09:03:30
工業機器人一般由主構架(手臂)、手腕、驅動系統、測量系統、控制器及傳感器等組成。 1圖是工業機器人的典型結構。機器人手臂具有3個自由度(運動坐標軸),機器人作業空間由手臂運動范圍決定。手腕是機器人
2015-01-19 10:36:12
)機器人的系統結構一臺通用的工業機器人,按其功能劃分,一般由3個相互關連的部分組成:機械手總成、控制器、示教系統,如圖所示。機械手總成是機器人的執行機構,它由驅動器、傳動機構、機器人臂、關節、末端操作器
2017-12-15 10:25:19
模塊化的控制系統體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教再現;示教也
2018-10-12 10:16:22
應用、故障維修等職業技術技能,涵蓋工業機器人機電裝調、工業機器人位置示教、工業機器人編程、工業機器人與 PLC 的通信、人機交互、可編程控制、氣動控制等專業核心能力和核心知識。同時,ZNH-IRW03型
2021-07-01 11:15:55
為本科、職 業技術學院、培訓機構機器人系統教學培訓的操作平臺。系統采用真實焊接機器人的設計理念, 學生可通過學習實踐,深入了解變位機和送絲機的工作原理,并掌握機器人基礎知識、基本操 作、示教編程、自動焊接
2021-07-01 13:39:38
labview 視覺機器人抓取工件 CCD相機的二維坐標系的建立?希望分享,謝謝
2017-08-18 20:53:37
首先提出幾個問題:機器人是怎記住位置的?機器人是怎么到達它的目標點的?到達目標點的速度多快?什么樣的姿態到達?機器人能不能識別障礙?帶著這些問題我們開始學習第一條指令PTP運動指令 運動指令在示教器
2021-09-01 06:13:36
機器人的電機傳動控制坐標系是怎樣確定的,是基于什么控制原理,學習機器人的控制理論有哪些比較經典的書籍,求大神指導?
2013-06-10 17:03:57
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
1、機器人的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
第二章 機器人系統與控制需求簡介2.1 工業機器人的系統組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
于機器人控制系統當中。那么今天,我們就通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現。 機器人控制系統 機器人控制系統相當于機器人的大腦,是決定機器人功能和性能的主要部分,它一般分為機器人
2023-02-24 17:05:21
ABB機器人示教器控制器故障維修蘇州吉海機電設備有限公司機器人維修中心,ABB機器人示教器控制器故障維修 蘇州吉海是一家專業的自動化工控產品維修企業,公司有充足的備件和優良的維修工程師,可為客戶提供
2020-10-12 15:43:12
機器人示教器、ABB機器人主板、ABB機器人線纜、ABB機器人控制柜 潤滑油TMO15020L ABB機器人電池) ),|工業機器人維修保養(ABB示教器維修 減速機更換 電機更換 電機維修更換
2020-08-19 10:32:02
應用方案、滿足各類機器人非標應用需求,甚至可以獨立開發全套上層編程示教系統,或針對科學研究、創客教育開發獨立上層軟件系統,極大促進工業機器人相關解決方案的發展和完善。為什么開發這樣一套系統?“我有一個
2018-03-02 14:42:06
KUKA庫卡C4機器人驅動器故障報警維修庫卡機器人維修內容包括庫卡機器人示教器維修,KUKA伺服驅動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
組合,實現對高速傳輸線上的不同物料進行快速的檢測、組裝。為了方便實訓教學,系統進行了專門的設計,可以完成各類機器人單項訓練和綜合性項目訓練,可完成各類機器人單項訓練和綜合性項目訓練。可以進行六軸機器人示教、定位、抓取、裝配等訓練,包含六自由度工業機器人、智能視覺檢測系統、PLC控...
2021-07-01 10:07:13
ZN-RAI02工業機器人與視覺實訓平臺是什么?ZN-RAI02工業機器人與視覺實訓平臺有哪些技術性能?ZN-RAI02工業機器人與視覺實訓平臺的結構是由哪些部分組成的?ZN-RAI02工業機器人與視覺實訓平臺有哪些配套軟件?
2021-08-09 06:22:03
ZNL-IR03工業機器人綜合實訓平臺是什么?ZNL-IR03工業機器人綜合實訓平臺有哪些特點?ZNL-IR03工業機器人綜合實訓平臺有哪些技術參數?
2021-08-16 07:16:23
,并進行控制。 工業機器人按臂部的運動形式分為四種。直角坐標型的臂部可沿三個直角坐標移動;圓柱坐標型的臂部可作升降、回轉和伸縮動作;球坐標型的臂部能回轉、俯仰和伸縮;關節型的臂部有多個轉動關節。工業機器人的基礎知識
2010-05-18 22:03:02
的移植、HMI、CAN-Bus、API、MFC坐標系的標定五大功能。最后完成一款可以對工業機器人進行示教的示教器研制。實驗室配有機器人控制器和機器人本體,因此本課題的實驗條件充足。
2015-07-23 22:14:55
ZN-ZN605型 六軸機器人、自動上料模塊、視覺檢測模塊、立體倉庫模塊、模擬焊接模塊、碼垛及軌跡示教模塊、總控系統模塊。 ZNH-IRW04型 工業機器人操作調整工技能鑒定平臺要求參賽選手根據競賽任務
2021-07-01 13:00:49
、離線編程仿真單元及安全防護設施等部分組成。集成多種機器人工業應用案例,實現工業機器人應用多功能教學實操。包含教學內容有機器人基本結構、基本操作、參數配置、示教編程、簡單語言編程等基礎實操、復雜軌跡
2021-07-01 13:43:02
全國區地區高價回收: (*** 同步V信) 全新/拆機不限,型號不限。收購的品牌型號有:大量回收:回收ABB變頻器/ABB機器人示教器,回收發那科伺服/發那科機器人示教器,回收安川伺服/安川機器人示
2021-08-18 14:31:15
。這種機器人還可以接受示教而完成各種簡單的重復動作,示教過程中,機械手可依次通過工作任務的各個位置,這些位置序列全部記錄在存儲器內,任務的執行過程中,機器人的各個關節在伺服驅動下依次再現上述位置,故這種
2015-01-19 10:58:38
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
生產設備和技術。 2、作為國內首家工業機器人教育機構華南機器人應用培訓中心,現開展培訓項目針對不同層次的需求,為各大學生、相關行業技術人員、科研院所的相關專業人員提供學習交流的平臺,學員通過學習培訓
2015-09-02 14:03:18
模式,逐漸向以工業機器人為主導的生產模式轉變。但是,隨著科技的發展和進步,原有單純采用通過示教和預編程來實現自動化工作的機器人產品在柔性生產能力上已經很難滿足現代生產的需要,引入具備機器視覺功能的機器人
2021-04-29 09:42:45
,通過示教器調出相應工件的焊接程序,按下啟動鍵,機器人通過接觸傳感器找到焊接起始點,并按照示教程序進行焊接。在焊接過程中,電弧傳感器實時檢測焊縫,并根據偏差量調整示教軌跡,完成焊接任務。同時,操作人員可以
2018-03-13 09:15:48
、曲線等運動軌跡的生成為多點插補方式,操作及編程方式為引導示教編程方式或坐標定位方式。在機器人產業中,常見到的機器人種類包括Deltarobot,以及工業產在線的機器手臂。若著眼的是工業自動化市場,則
2020-07-29 06:57:04
大量回收全新發那科示教器,新舊不限。發那科示教器回收,FANUC機器人示教器回收價格表,回收發那科示教器,FANUC示教器回收,回收FANUC示教器,回收機器人示教器,回收abb示教器,回收莫特曼示
2020-05-12 13:26:06
合適速度; D:然機器人到達BCO點位,然后停止機器人; E:手動旋轉示教器上面的鑰匙開關,切換機器人為AOTU自動運行模式; F:上電和確認提示信息等,如果機器人有錯誤報警不確認機器人將不能運行
2020-09-04 15:45:41
率機器人系統。電動上電運行前要作如下檢查:1、電源電壓是否合適(過壓很可能造成驅動模塊的損壞); 對于直流輸入的+/-極性一定不能接錯,驅動控制器上的電機型號或電流設定值是否合適(開始時不要太大);2
2018-10-30 15:11:29
率機器人系統。電動上電運行前要作如下檢查:1、電源電壓是否合適(過壓很可能造成驅動模塊的損壞); 對于直流輸入的+/-極性一定不能接錯,驅動控制器上的電機型號或電流設定值是否合適(開始時不要太大);2
2018-10-30 15:02:58
手機同步微信:185 5025 5583 昆山蘇州上海回收示教器ABB示教器庫卡示教器發那科示教器高價回收全新發那科機器人示教器回收發那科示教器出售現貨 回購回收ABB機器人示教器回收kuka機器人
2020-06-20 08:07:44
就是想問下,機器人關機的時候,是不是要等到示教器出現到“connect……”畫面之后才可以斷電,還是在示教器上選擇了關機后,馬上就可以斷電?
2015-01-16 10:30:00
招聘:工業機器人助理/學徒,工業機器人儲備工程師,工業機器人初級工程師晉升渠道:儲備工程師-初級工程師-中級工程師-高級工程師-管理-研發公司福利:儲備工程師薪資待遇4000+績效獎金+加班獎金+節日福利獎金轉正后初級工程師5000+績效獎金+加班獎金+項目提成+技能補貼+節日***
2020-02-12 09:45:59
的格局為前提,選擇合適的機器人來完成某些任務。 核工業機器人是應用在輻射環境下的特種機器人。機器人在這里完成的工作不是在生產線的規定位置完成已經安排好的任務,它要完成的是位置不定的多種多樣變化的工作
2017-08-07 11:26:13
求助,,,當安川機器人運行過程中突然按下示教器上停止按鈕時然程序指針調到程序第一步(NOP步)執行程序應該怎么編寫?
2017-12-02 01:32:49
焊接機器人的原理:焊接機器人是一種高度自動化的設備,焊接機器人的基本工作原理是示教再現,即由用戶導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態、運動參數
2020-11-16 16:18:45
請問工業機器人有什么優劣勢?
2021-06-18 06:04:14
控制、插補運算后控制伺服,進而控制電機和機器人本體運動。機器人示教器是一個復雜的系統,屬于標準嵌入式系統,是硬件和軟件的結合體,在對機器人示教器硬件平臺開發時,必須對其功能進行分析,才能選擇合適
2017-03-16 14:42:26
、程序編輯步驟、手動調試技巧以及示教器常用操作等核心內容,同時針對實際使用中常用的指令進行詳細的講解。通過學習本書,使讀者能夠熟練掌握ABB工業機器人的基本操作,對其知識體系具有全面的認識。5、工業
2018-10-29 17:03:22
通過介紹目前噴涂機器人的研究現狀,引出在工業級計算機IPC 與運動控制卡的平臺上研制六自由度噴涂機器人的可行性。在參考其它工業機器人的示教檢查的基礎上,本文提出符
2009-12-19 15:27:51 18
18 深圳泰科智能TB6系列協作機器人是泰科智能自主研發的6軸輕型協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。采用自主設計研發RJSII系列關節模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
TA6-R5協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
深圳泰科智能TA6系列協作機器人是泰科智能自主研發的6自由度的協作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協同工作。 采用自主設計的RJS系列關節模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
泰克機器人示教仿真軟件視頻(孫斌,段晉軍)
2013-09-17 10:02:0274 碼垛機器人示教器的設計與實現_朱琳
2017-01-18 20:24:573 系統中。 這就對現階段的機器人技術提出了要求,其中,示教技術就是重要的一項。機器人示教技術指的是通過編程指揮機器人去完成某一具體任務。編程的過程即為示教過程。 ABB機器人示教器(FlexPendant)由硬件和軟件組成,其本
2017-09-29 16:59:088 滿足日益增長的復雜性要求,機器人不僅要能長期穩定地完成重復工作,還要具備智能化、網絡化、開放性、人機友好性的特點。作為工業機器人繼續發展與創新的一個重要方面,示教技術正在向利于快速示教編程和增強人機協作能力的方向發展。 工
2017-10-09 16:03:051 我們在工業機器人選型時,往往會遇到工業機器人負載的選擇,怎么選擇合適的負載?這個難題往往困擾著我們,今天我就為大家解答一下,如何選擇合適的負載和合適的夾具尺寸范圍。 工業機器人對工具的限制 允許可搬
2017-10-09 16:10:246 設定工件坐標是進行示教的前提,所有的示教點都必需在對應的工件坐標中建立。如果在wobj0上建立示教點,如果機器人在搬動以后就必須重教所有的點。如果有是在對應的工件坐標上示教的話就可以只修改一下工件坐標,而無需重教所有的點。
2017-10-17 17:06:494 本書從認識到熟練掌握工業機器人,并根據實際應用進行基本作業示教這一主題,以工業機器人四巨頭ABB、KUKA、FANUC和YASKAWA為主要對象,通過典型案例對工業機器人示教和操作的相關基礎共性
2017-12-21 17:52:027074 針對當前工業機器人示教中,虛擬示教方式存在場景真實度低、靈活性差等問題,對T業機器人的虛擬示教進行了研究,應用虛擬現實技術,提出了一種面向ABB IRB4600系列機器人的虛擬示教設計方法。分析了
2018-02-26 10:19:372 工業機器人示教編程和離線編程,有何區別?
2018-03-05 15:59:5221207 一般來說,操作FANUC機器人時,需要使用FANUC示教器iPendant來對機器人進行示教、做信號配置等。對于熟練使用示教器的用戶來說,示教器就是他們控制機器人的工具。沒有示教器,還能控制機器人嗎?答案是肯定的。
2018-05-30 16:09:2512115 
速度倍率是決定機器人運動的實際速度的兩個因素之一,以百分符號%來表示。當前的速度倍率在示教器屏幕的右上角顯示。速度倍率為100%時,機器人以最快的速度倍率運動。
2018-07-24 10:55:008507 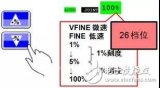
示教器是進行機器人的手動操縱、程序編寫、參數配置以及監控用的手持裝置。
2018-08-10 09:42:2969379 作為并聯機器人繼續發展與創新的一個重要方面,拖動示教的應用將為并聯機器人調試技術趨向快速、簡便的方向發展。秉承不斷創新突破自我的勃肯特,在11月正式通過拖動示教在并聯機器人上的內部測試,實現該項技術在并聯機器人應用的零突破。
2018-12-07 17:14:081705 本文檔的主要內容詳細介紹的是機器人Rt800示教器的操作用戶手冊資料免費下載。
2018-12-17 08:00:004 。機器人在示教狀態時,接受示教系統送來的各示教點位置和姿態信息、運動參數和工藝參數,并通過計算把各點的示教 (關節) 坐標值轉換成直角坐標值,存入計算機內存。
2019-10-14 14:44:218460 隨著科技的進步,越來越多企業都轉型往智能制造行業方向發展了,這也是工業機器人為什么會快速普及的原因了,就拿拖動示教噴涂機器人來說,它具有免編程噴涂、噴涂質量高、效率高以及回報率高等優勢特點,幫助企業
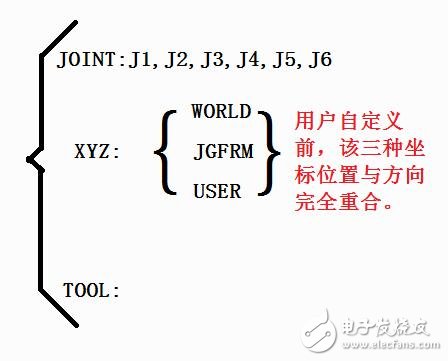
2020-08-11 09:52:032050 坐標機器人又稱單軸機械手,工業機械臂,電缸等,是以XYZ直角坐標系統為基本數學模型,以伺服電機、步進電機為驅動的單軸機械臂為基本工作單元,以滾珠絲桿、同步皮帶為常用的傳動方式所架構起來的機器人系統,可以完成在XYZ三維坐標系中任意一點的到達和遵循可控的運動軌跡。
2020-08-24 09:50:332951 的編程方法主要有三種: 1)示教編程,是一項成熟的技術,它是目前大多數工業機器人的編程方式,采用這種方法,程序編制是在機器人現場進行的。 2)離線編程,是在專門的軟件環境下,用專用或通用程序在離線情況下進行機器
2020-09-25 11:42:337314 HOME點 使用示教器手動操作機器人移動到合適位置,作為機器人的HOME點。將光標定位在HOME程序行,點擊示教器界面左下角【更改】軟鍵,將HOME8名稱改為HOME5,因為HOME是全局變量,會影響其它程序的初始位置。 點擊HOME5后黑色三角形設定工具坐標系和基坐標系 點擊示教器界面
2020-09-29 09:19:489304 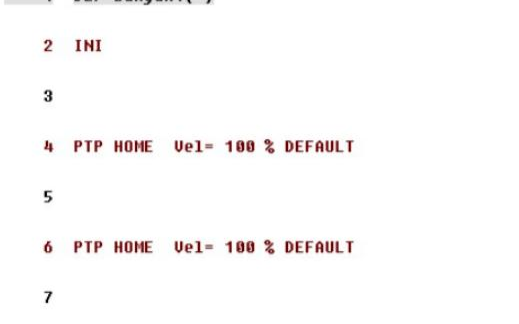
基于深度學習的機器人示教系統設計與實現
2021-06-30 15:53:3780 焊接機器人示教器的作用有哪些?主要用于設置焊接參數、焊接路徑、遠程監測示教減少傷害事故。
2023-02-12 09:27:444668 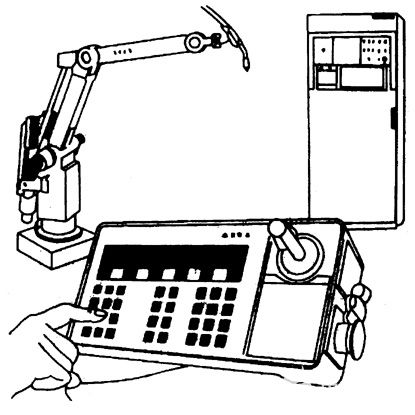
工業機器人系統主要由機器人(機械手)本體、機器人控制器、示教器等組成。那么,示教器是什么?示教器簡稱TP,它是用戶與機器人之間相互交流的重要裝置。用戶可以通過操作示教器來查看機器人當前位置、寄存器
2022-09-08 17:21:172362 
”是什么?示教器全稱叫做“示教編程器”,是一種應用于機器人控制的手持式裝置。在機器人的運動控制系統中,示教器通過通訊電纜連接控制柜或者運動控制器,通過設置運動參數與編寫
2023-03-06 13:52:136881 
器”是什么? 示教器全稱叫做“示教編程器”,是一種應用于機器人控制的手持式裝置。在機器人的運動控制系統中,示教器通過通訊電纜連接控制柜或者運動控制器,通過設置運動參數與編寫機器人的運動路徑,即可讓機器人按照編寫
2023-07-14 11:45:054791 
焊接機器人是現代制造業中廣泛使用的自動化設備,它可以高效、精確地進行焊接工作,提高生產效率和焊接質量。然而,為了讓機器人能夠執行任務,需要進行示教操作,將所需的動作和路徑錄入機器人的控制系統。本文將
2023-08-02 17:56:532240 
朗宇芯HT機器人示教器系列,是專用于工業機器人、注塑、桁架機床、數控系統等行業的移動式人機交互終端,它集顯示、觸摸、功能按鍵于一體,滿足不同工藝應用場景下的人機交互需求。產品定位:幫助機器人企業提升
2023-08-24 15:08:29991 
目前機器人示教器通過搖桿;按鍵;旋鈕等方式對機器人的運動做出控制,結合示教器內部的系統軟件,將數據發送至機器人控制系統,以此達到示教器的輸入目的,當機器人運動時,其運動狀態等信息需要展示給用戶,則機器人系統將數據傳輸到示教器,示教器對機器人運動狀態進行相關的顯示,以此達到人際交互的目的。
2021-10-28 10:04:522105 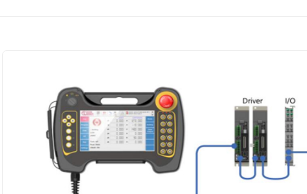
電子發燒友網站提供《教你怎樣選擇合適的工業機器人.doc》資料免費下載
2023-10-10 10:21:000 ?? ? ?示教器通常也叫示教編程器或示教盒,是進行機器人的手動操縱、程序編寫、參數配置以及監控用的手持裝置;是機器人控制系統的核心部件,是一個用來注冊和存儲機械運動或處理記憶的設備,該設備是由
2024-03-23 08:42:231996 機器人完成特定的任務。編程可以手動完成,也可以通過計算機輔助設計(CAD)軟件自動生成。編程方式的選擇取決于任務的復雜性、機器人的類型、以及所需的靈活性和效率。 1. 手動編程 1.1 示教編程 直接示教 :操作員直接控制機器人的
2024-09-04 09:26:173770 工業機器人示教器是一個關鍵的人機交互設備,通過它操作者可以操作工業機器人運動、完成示教編程、實現對系統的設定、故障診斷等。以下是工業機器人示教器上常見按鈕的功能介紹: 一、緊急停止與安全相關按鈕
2024-09-04 09:44:449992 。 一、什么是示教模式 焊接機器人示教模式是指通過手動操作機器人,使其按照預定的焊接路徑進行移動,并記錄該路徑。該模式下,操作人員可以對焊接機器人進行編程,使其能夠在自動模式下重復執行同樣的焊接任務。示教模式
2024-09-09 17:55:351451 
隨著拖動示教在協作機器人、并聯機器人上的應用,將調試技術趨向快速、簡便的方向發展,滿足生產企業應用機器人進行及時、高效的生產需求,以及在工業4.0和“中國制造 2025”的背景下,適應現代工業快速
2024-10-23 15:52:162676 
。DMC600M拖動示教控制系統? ? ??拖動示教通常使用以下步驟:? ? ??示教模式切換:將機器人切換到示教模式,使其能夠記錄操作員的動作。? ? ??手動示教:操作員通過手動移動機器人的末端執行器,來
2024-10-23 15:52:161472 ? ? ? 智能拖動示教噴涂機器人是近年來工業自動化領域的一項重要創新,它的出現不僅極大地提升了噴涂作業的效率和質量,還為傳統制造業的轉型升級提供了有力支持。本文將從智能拖動示教噴涂機器人的技術特點
2024-12-12 10:27:201149 
松下機器人示教編程教學課件(新)
2025-06-11 17:23:330
 電子發燒友App
電子發燒友App








 工商網監
工商網監
評論