 什么是拖動示教?機器人拖動示教方式分析
什么是拖動示教?機器人拖動示教方式分析

隨著拖動示教在協作機器人、并聯機器人上的應用,將調試技術趨向快速、簡便的方向發展,滿足生產企業應用機器人進行及時、高效的生產需求,以及在工業4.0和“中國制造 2025”的背景下,適應現代工業快速多變的特點,滿足制造業日益增長的復雜性要求。
機器人拖動示教,就是操作員可以直接拖著機器人各關節,運動到理想的姿態,記錄下來。協作機器人是較早具有該功能的系統。這種示教方式可以避免傳統示教的各種缺點,是機器人中一項很有應用前景的技術。
目前拖動示教可以分為兩大方向:增加傳感器類和運用物理學公式類
傳感器類:是在機器人關節處安裝力矩傳感器,配合控制器中的算法,操作者牽引機器人末端執行器做線性或者旋轉的運動,檢測出用戶施加在該處的外力信息的拖動示教。這種方法雖然實現起來較為簡單,但需要額外配置力矩傳感器,增加了機器人的示教成本,并且由于手動強行拖拽,使得機器人的運動顯得十分僵硬,想要獲取特定點還需要傳統的遙控示教盒的輔助。
(1)末端力矩傳感器類
通過在機器人末端安裝六維力矩傳感器, 控制器可檢測出用戶施加在該處的外力信息(FX,FY,FZ,TX,TY,TZ),再結合阻抗/導納控制,即可實現機器人的拖動示教。
這種方式實現起來較為簡單,然而質量不好的力傳感器零點容易漂,會有安全隱患,而質量稍微好點的力傳感器價格貴的要死,甚至比機器人本體還貴。而且,它只支持在傳感器安裝處的拖動示教,實現方式不靈活。筆者在今年的機器人展上體驗過新時達的該類機器人, 拖動中會感覺會偶爾出現跳變,估計是傳感器標定等相關的問題造成的。
(2)關節力矩傳感器類
這種方式的機器人本體結構的特點是在關節處需安裝力矩傳感器和雙編碼器, 組成柔性關節或線彈性驅動器(serial elastic joint)。減速器一般采用剛度較低的諧波減速器。
傳統的工業機器人為了提高位置追蹤精度,系統的剛度往往是越大越好。而這類機器人通過降低關節剛度,達到提高力矩檢測和控制的靈敏度的目的。由于關節剛度較低,電機與連桿端的角度不一樣,因此需要在連桿端(力矩傳感器輸出) 再加一個編碼器。目前市面上典型產品有 Kuka 公司與德國宇航局共同研發的幾款輕型機械臂和Rethink robotics。
這種結構的優勢是可以精確對系統建模, 提高力矩檢測和控制精度,拖動示教也會更輕松更柔順。然而, 過高的結構復雜度和成本導致這些機器人的市場接受度較低。
物理學公式類:這種方式不需要在機器人本體上加其余力矩傳感器,優勢是成本低,結構簡單,但手感會比上一種稍微差點。這種方式是目前拖動示教的主流方案, 這種類型的拖動示教,機器人驅動器工作在電流/力矩模式。
(1)開環力控
是更為直接的機器人拖動示教方法,基于力矩控制的零力平衡,即借助機器人的動力學模型,控制器可以實時的算出機器人被拖動時所需要的力矩,然后把提供該力矩給電機使得機器人能夠很好地輔助操作人員進行拖動。
通過逆動力學算得的電機所需要的力矩,其計算公式包括慣性力項、科里奧利力 和離心力項、重力項以及摩擦力項。而當中的根據選擇的摩擦力模型可以分解為粘性摩擦力項、庫侖摩擦力項以及補償。
不同于傳統阻抗的拖動示教方法,零力控制方法在示教時依靠精確的動力學模型,拖動機器人的摩擦力以及慣性力都的到了相應的電機力矩的抵消,使得機器人能夠輕松的拖動,對操作者更友好。同時算法也保證了當外力被撤銷時,機器人能夠迅速的靜止在當前位置,確保了設備和操作人員的安全。
零力控制拖動示教的另一個優勢是,在動力學模型中,各關節的力矩是可以單獨控制的,所以機器人的拖動點不再被固定在末端執行器上,操作者可以在機器人任意位置去拖動機器人,使操作更加靈活多變。
(2)閉環力控
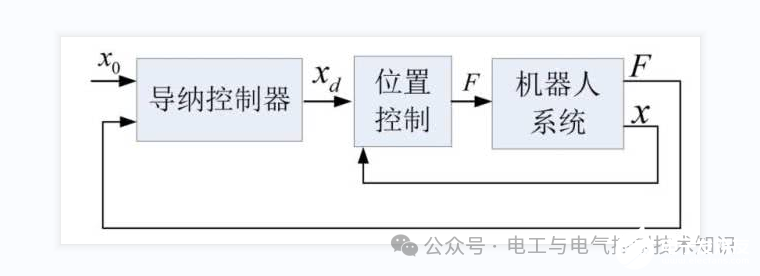
閉環力控會存在如下一個力反饋回路,它通過算法估計出用戶的牽引力矩, 再通過阻抗控制,讓電機輸出一個輔助力矩,幫助用戶拖動機器人,完成示教工作。由于反饋回路的存在,它對機器人建模和系統辨識的精度要求較低。
閉環力控的另一大優勢是它通過算法改變了機器人的整體動力學特性,可降低機器人與環境交互中的阻抗特性,這也是提出閉環力控的一個初衷。這項技術可在一些對接觸力要求較低場合,取代力矩傳感器的作用,比如可以用來做柔性裝配等。
-
機器人
+關注
關注
213文章
31079瀏覽量
222209 -
工業控制
+關注
關注
38文章
1660瀏覽量
91504 -
力矩傳感器
+關注
關注
0文章
24瀏覽量
4559
發布評論請先 登錄
深視課堂丨點激光位移傳感器SD33系列兩點示教操作指南(第四課)

SDI錄像機CM8004B:賦能示教領域,驅動技能教學數字化升級
深視課堂丨點激光位移傳感器SD33系列一點示教操作指南(第三課)

瑞芯微RK3588:工業機器人的“決策中樞”與智造新范式

海默智能噴涂機器人——為工業噴涂解鎖新技能


人形機器人背后的“靈魂導師”:工程師示教的價值與富唯智能的實踐

大象機器人推出移動復合機器人myAGV Pro
騰龍 MP3010M-EV:機器人視覺的“智能伙伴”,復雜環境下的穩定成像
創想智控焊縫激光跟蹤系統在管板免示教焊接的應用

拖動示教噴涂設備有哪些部件組成?




 工商網監
工商網監
評論