 KUKA工業機器人搬運工具操作教程二
KUKA工業機器人搬運工具操作教程二

任務四:示教編程
(1)打開程序
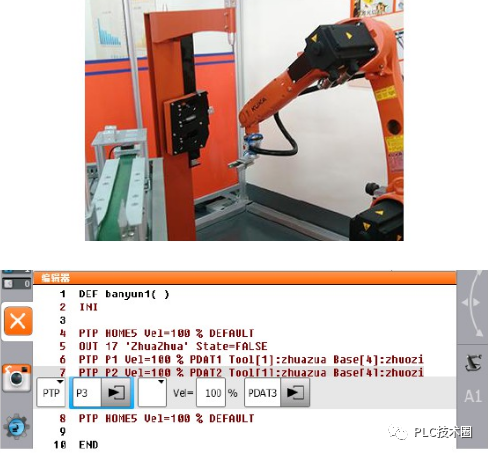
打開已經新建的程序文件banyunl“ ,進入程序編輯器。程序編輯器中有4行程序,其中, INI:初始化,END:程序結束,中間兩行為回HOME點。

(2)示教:回HOME點
使用示教器手動操作機器人移動到合適位置,作為機器人的HOME點。將光標定位在HOME程序行,點擊示教器界面左下角【更改】軟鍵,將HOME8名稱改為HOME5,因為HOME是全局變量,會影響其它程序的初始位置。

點擊HOME5后黑色三角形設定工具坐標系和基坐標系

點擊示教器界面右下角【OK】軟鍵, 彈出對話框, 點擊【是】接納坐標系修改, 繼續彈出對話框, 點擊【是】采用此點作為HOME5點, 同時完成第4行PTP命令的修改。同樣地, 將默認的第6行命令中HOME點

(3)示教1/0:氣爪打開
將光標選擇在第5行, 點擊示教界面左下角【指令】軟鍵, 相繼選擇【邏輯】→【OUT】→OUT指令, 彈出OUT聯機表格。將輸出端編號改為17, 輸出接通狀態改為FALSE, 取消CONT, 完成OUT命令參數設置, 點擊示教界面右下角【OK】軟鍵。同時, 再次將光標選擇在第5行, 點擊示教界面右下角【編輯】軟鍵, 選擇【刪除】將第5行空行刪除。


(4 )示教:P1點
手動操作機器人移動到Pl點, 將光標移至第5行,點擊示教界面左下角【指令】→【運動】→【PTP】,添加指令PTP示教界面右下角【OK】軟鍵完成P1點示教

(5 )示教:P2點
手動操作機器人移動到P2 點, 將光標移至第6行,點擊示教界面下邊【上一條指令】,繼續點擊添加指令PTP,點擊示教界面右下角【OK】軟鍵完成P2點示教

(6 )示教:P3點
手動操作機器人移動到P3 點, 將光標移至第7行,點擊示教界面下邊上一條指令繼續添加指令PTP,點擊示教界面右下角【OK】軟鍵完成P3點示教
(7 )示教:P4點
手動操作機器人移動到P4點, 將光標移至第8行, 點擊示教界面下邊【上 條指令】, 繼續添加指令PTP,點擊示教界面右下角【OK】軟鍵完成P4點示教。

(8)示教:P5點
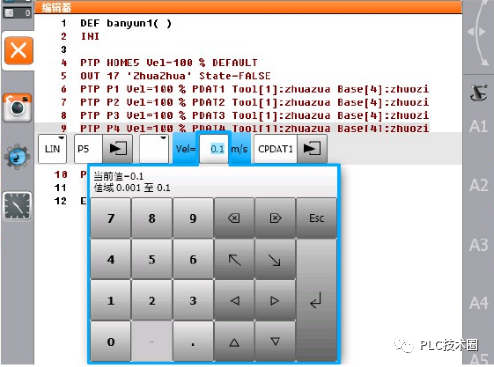
手動操作機器人移動到P5點, 將光標移至第9行, 點擊示教界面左下角【指令】→【運動】→【LIN】, 添加指令LIN,修改速度為0.1m/s,點擊示教界面右下角【OK】軟鍵完成P5點示教
(9)示教1/0:氣爪抓緊
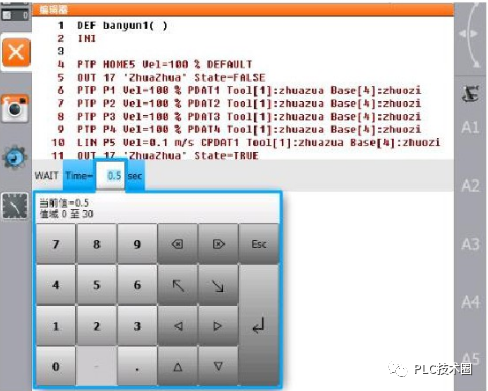
將光標選擇在第10行, 點擊示教界面左下角【指令】軟鍵, 相繼選擇【邏輯】→【OUT】→OUT指令, 輸出端編號默認為17,輸出接通狀態改為TRUE, 點擊右下角【OK】完成OUT命令參數設置

(10)示教等待
為使得氣爪可靠夾緊工件,在此設置等待時間0.5s。將光標選擇在第11行,點擊【指令】→【邏輯】→【WAIT】,設置時間參數,點擊右下角【OK】完成等待示教
(11 )示教:P6點、 P7點、 P8點、 p9點、 HOME
參照P4點, 用 LIN命令示教P6點:分別參照P3點、 P2點、 Pl點, 用PTP命令分別示教P7點、 P8點、 pg點;用PTP命令回歸HOME點所示, 完成機器人從卸料區抓取工件過程。
(12 )示教:P10點
手動操作機器人移動到P10點, 將光標移至第16行, 點擊示教界面左下角【指令】→【運動】→【PTP】,添加指令PTP,點擊示教界面右下面角【OK】軟鍵完成P10點示教

(13 )示教:P11點
手動操作機器人移動到P11點,將光標移至第18行, 點擊示教界面左下角【指令】→【運動】→【LIN】,添加指令LIN,修改速度為0.1m/s,點擊示教界面右下面角【OK】軟鍵完成P11點示教

(14)示教1/0:氣爪打開
添加OUT指令, 將氣爪打開, 工件放置于堆垛區指定地點
(15)示教等待
為確保氣爪可靠打開, 添加WAIT延時指令。
(16)示教:P12點, HOME
參照P10點, 用 LIN命令示教P12點:用 PTP命令回歸HOME點, 完成機器人從堆垛區放置工件過程, 完成搬運任務。
示教完成之后, 參考程序如圖所示。

待續。。。請看下一篇
責任編輯:xj
原文標題:KUKA工業機器人搬運編程與操作(中)
文章出處:【微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
-
編程
+關注
關注
90文章
3716瀏覽量
97191 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98188
原文標題:KUKA工業機器人搬運編程與操作(中)
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
智能復合機器人解決方案:優化自動化搬運與提高物流效率
【案例分享】電子谷多芯線束賦能高效產線!AGV 搬運機器人穩定連接方案

PFC模塊是電的“高效搬運工
高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
AGV搬運機器人聯網監控系統方案
復合機器人開啟血漿包“零接觸”搬運新時代

工業機器人線束揭秘 | 性能加持助力機器人作業效率穩定躍升
工業機器人的特點
工業機器人與協作機器人概念不同

EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用

AGV搬運機器人耗電量因素



 工商網監
工商網監
評論