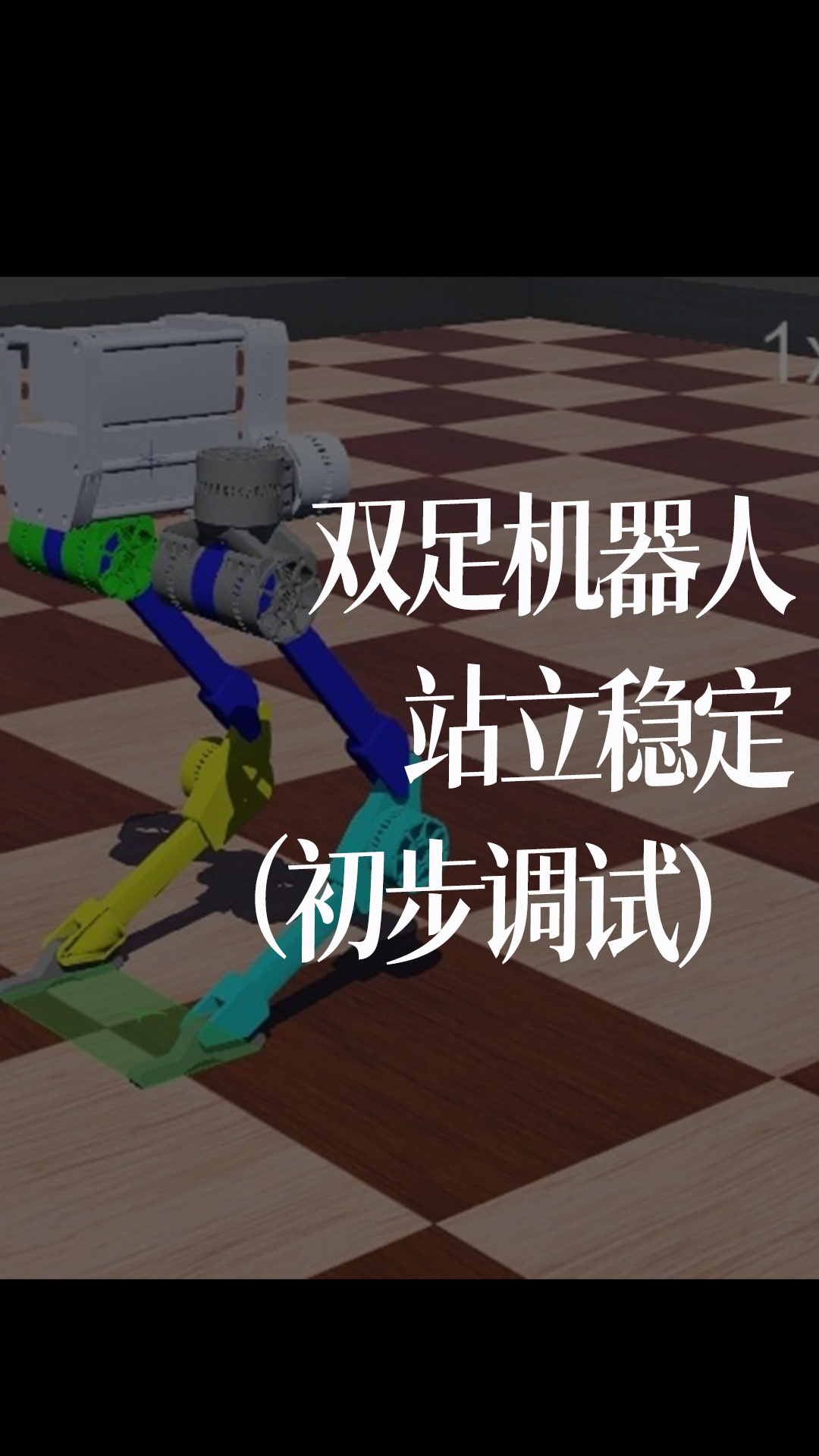
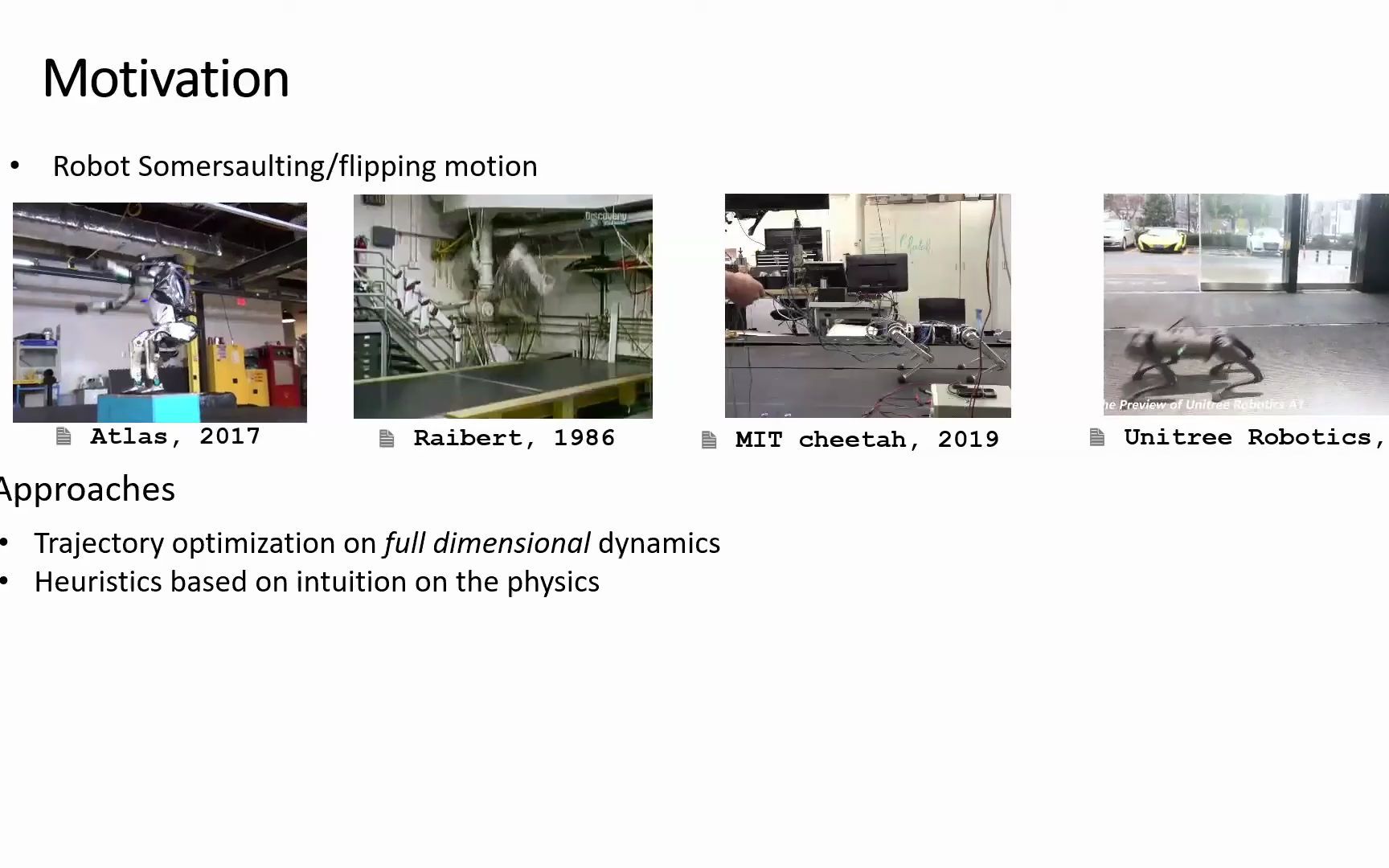
仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2011-01-23 16:42:37 1989
1989 
機器人元器件 機器人套件
2024-03-14 20:37:45
機器人元器件 機器人套件
2024-03-14 20:37:55
Makeblock Me 機器人元器件 機器人套件
2024-03-14 21:40:36
機器人元器件 機器人套件
2024-03-14 22:03:38
`剛開始做機器人,實物圖`
2013-11-25 11:36:20
第三章、雙足機器人的硬件結構與框圖一、雙足機器人的硬件框圖圖1. 雙足機器人結構框圖
2013-11-25 11:30:18
介紹ARDUINO的基礎知識,介紹擴展版及擴展庫,最后介紹雙足機器人,遙控機械臂等應用
2016-04-13 23:02:58
本帖最后由 colorsky 于 2016-4-21 14:05 編輯
大家好,我是ColorSky。這是我的雙足機器人的開源項目。先發出視頻給大家看看,后面陸續會把技術資料上傳。機器人鞠躬動作機器人舞蹈1視頻機器人跳機器舞視頻
2016-04-21 10:51:28
機器人元器件 機器人套件
2024-03-14 21:13:23
云臺 機器人套件
2024-03-14 22:33:42
申請理由:NanoPi2在體積和性能上非常適合我的項目,我相信有這開發板,我設計的項目一定如虎添翼項目描述:該機器人控制8個舵機模仿人行走,用紅外線檢測在前方有礙時,會自動轉向
2015-12-02 16:10:52
`(不太會用論壇的發帖來編輯,圖片的位置都在最后面,附件里有技術報告)一、項目設計背景及概述雙足步行機器人是機器人研究領域的熱點,它集機械、電子、計算機、仿生學、自動控制、多傳感器及人工智能等多門
2014-01-02 14:31:52
通過安芯一號控制雙足機器人腿部關節六個舵機的角度以及轉動角速度,使機器人完成行走,翻滾,原地360等動作。機器人在規定區域內向前走,通過傳感器找到動作區,完成一系列動作;并且可以通過串口與PC機時時通信,傳回機器人的參數
2013-09-28 18:58:35
摘要: 介紹了一種由氣動人工肌肉構建的雙足機器人關節,該關節利用氣動人工肌肉的柔性特性,可以有效控制雙足機器人快速行走或跑步時的落地腳沖擊問題。詳細給出了氣動人工肌肉的工作原理以及由其構成
2012-12-06 15:32:52
學校要舉辦機器人大賽,我們是雙足機器人,但是找不到相應的舵機驅動軟件,舵機驅動的單片機型號是atmel mega166pa有三個晶振,上面有霸天虎的圖案,請各位大神速來幫忙,急求這樣一款32路舵機的軟件!!
2014-07-10 09:59:03
國內首屈一指的機器人公司招聘算法專家,(導航、視覺、控制算法都有需求)控制算法需要有雙足機器人的項目經驗。碩士生要求5年以上工作經驗,博士生3年以上工作經驗即可。無論是企業內的專家,還是在高校搞研究
2020-07-03 18:15:17
雙足機器人的起立動作是雙足機器人步行之前重要的基本準備動作,本文通過連桿結構分析一種雙足機器人的起立方法,主要分析了起立過程的動作規劃,分階段計算出使機器人
2010-01-13 14:52:29 35
35 設計了一款低成本的小型雙足 機器人 研究平臺。根據仿生學原理確定機器人的比例尺寸,根據機器人的功能要求確定其自由度配置, 選擇了合適的材料和驅動元件,實現了一個小型的雙
2011-06-07 18:36:31128 2012-05-31 17:01:1077 2014-03-26 10:25:3612 2015-01-22 20:15:08131 仿人機器人一直是自動控制領域研究的熱點。在模仿人類進行邁步行走時,由于仿人機器人的重心經常要處于中心線以外的區域,使得它的身體很難保持站姿平衡,能夠穩定地實現雙足行走是仿人機器人研究的重點也是難點。
2016-09-19 10:53:1947 悟空、悟能雙足機器人教程
2016-12-20 22:43:358 兩臺機器人分別被命名為BALLU(浮力輔助輕量級腿部單元系統)和NABiRoS(非擬人兩足機器人系統),雖然它們的造型有些奇特,但是兩款機器人都代表了科研機構對于機器人運動新的探索。
2016-11-21 17:36:551105 1.1 雙足機器人現狀 隨著世界第一臺工業機器人1962年在美國誕生,機器人已經有了三十多年的發展史。三十多年來,機器人由工業機器人到智能機器人,成為21世紀具有代表性的高新技術之一,其研究涉及
2017-09-16 09:58:2747 由于舵機已經選定,則根據加入墊片以后各寬度設計支架的寬度,并按著人體比例設計大腿、小腿處需要的支架的長度。(如下圖標注所示) 根據資料查閱,絕大多數小型雙足機器人關節材料均選用鋁合金作為材料,整個
2017-11-12 10:40:2520 研究了半被動雙足機器人的平面穩定行走控制問題。以最簡行走模型為動力學模型,采用沿支撐腿方向的腳后跟脈沖推力作為行走動力源。考慮到系統模型的非線性特征,將基于三角函數擴展的函數鏈接型人工神經網絡控制
2018-01-14 15:49:060 優化算法,使用節點緩存來生成一個引力函數來減少移動代價。最終的算法能夠快速地生成初始路徑,在規劃時間內不斷地改進路徑且通過使用閾值來確保后面路徑都比上次的移動代價更小。雙足機器人仿真實驗中,改進后的算法與初始的
2018-02-10 11:57:310 針對大型17R加藤一郎結構雙足機器人仿人行走控制問題,從仿人機器人的機械結構、控制系統、步態仿真、動力學參數等方面對機器人的影響進行了研究,采用仿生學原理,參考了人體上、下半身比例特點,對機器人
2018-03-02 15:59:301 雙足機器人使用的平衡控制策略是「靜態步行」(static walking)。這種策略的特點是:機器人步行的過程中,重心(COG,Center of Gravity)的投影始終位于多邊形支撐區域
2018-05-28 03:18:0011983 隨著人工智能的在近幾年發展的火爆,許許多多奇形怪狀的機器人也隨之誕生了。目前,美國密西根大學機器人科學家杰西格里茲爾研發出了一款雙足機器人,它不僅可以直立行走,還可以穿越火場救援,還可以當作搬運工來使用。
2018-08-24 09:41:001940 機器人是一門綜合性很強的學科,有著極其廣泛的研究和應用領域。機器人技術是綜合計算機技術、信息融合技術、機構學、傳感技術、仿生科學以及人工智能等多學科而形成的高新技術,它不僅涉及到線性、非線性
2018-10-07 09:03:007782 近日,美國德克薩斯大學奧斯汀分校科克雷爾工程學院的研究人員研發出一款雙足機器人“水星(Mercury)”,該機器人能夠在被人類意外擊中或在沒有警告的情況下施加力量時保持平衡。
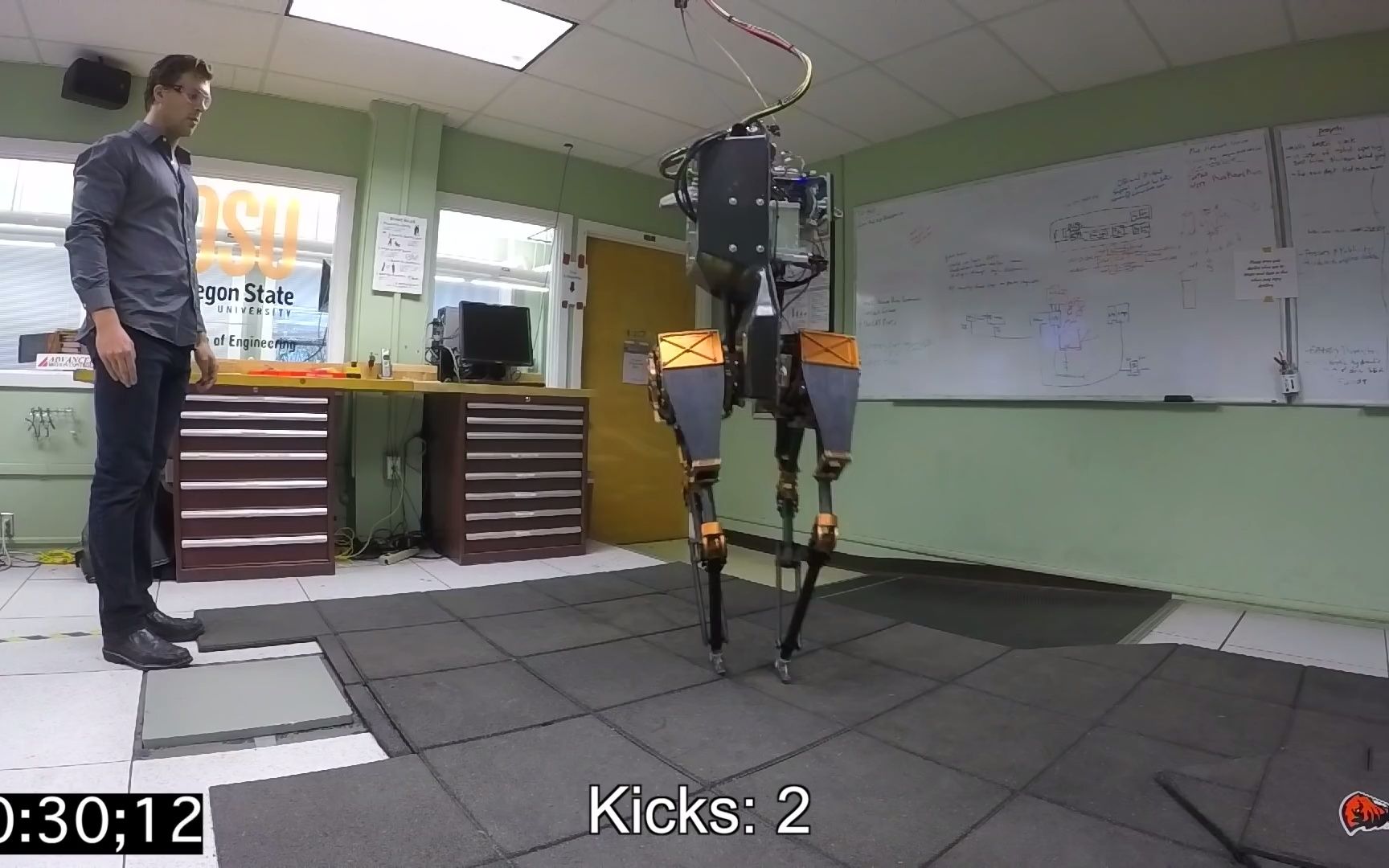
2018-10-16 15:22:134221 Cassie是在另一款雙足機器人ATRIAS基礎上研發的,但ATRIAS的外形像BBC著名科幻電視劇《神秘博士》(Doctor Who)中的機器人“戴立克”(Dalek),而Cassie更像是《機械戰警》中的兩足機器人“ED-209”。
2018-11-08 16:46:072438 今年國內幾檔機器人格斗綜藝火爆銀屏,讓機器人和普通民眾的距離一下拉近了很多。但節目上的機器人都是履帶式或輪式機器人,很多觀眾都期待看到類似電影《鐵甲鋼拳》中的人形機器人登臺對戰。
2018-11-19 14:26:082599 最近,中國在雙足機器人領域也算是捷報頻傳了,前幾天CES展會上優必選的Walker仿人機器人剛剛驚艷亮相,這兩天小編我又在中國新聞的網站上看到了另一款來自上海理工大學雙足機器人小貝。據介紹這是全球目前唯一可以同時做到“平衡、高效、智能、安全、經濟”5個關鍵特性的大雙足機器人
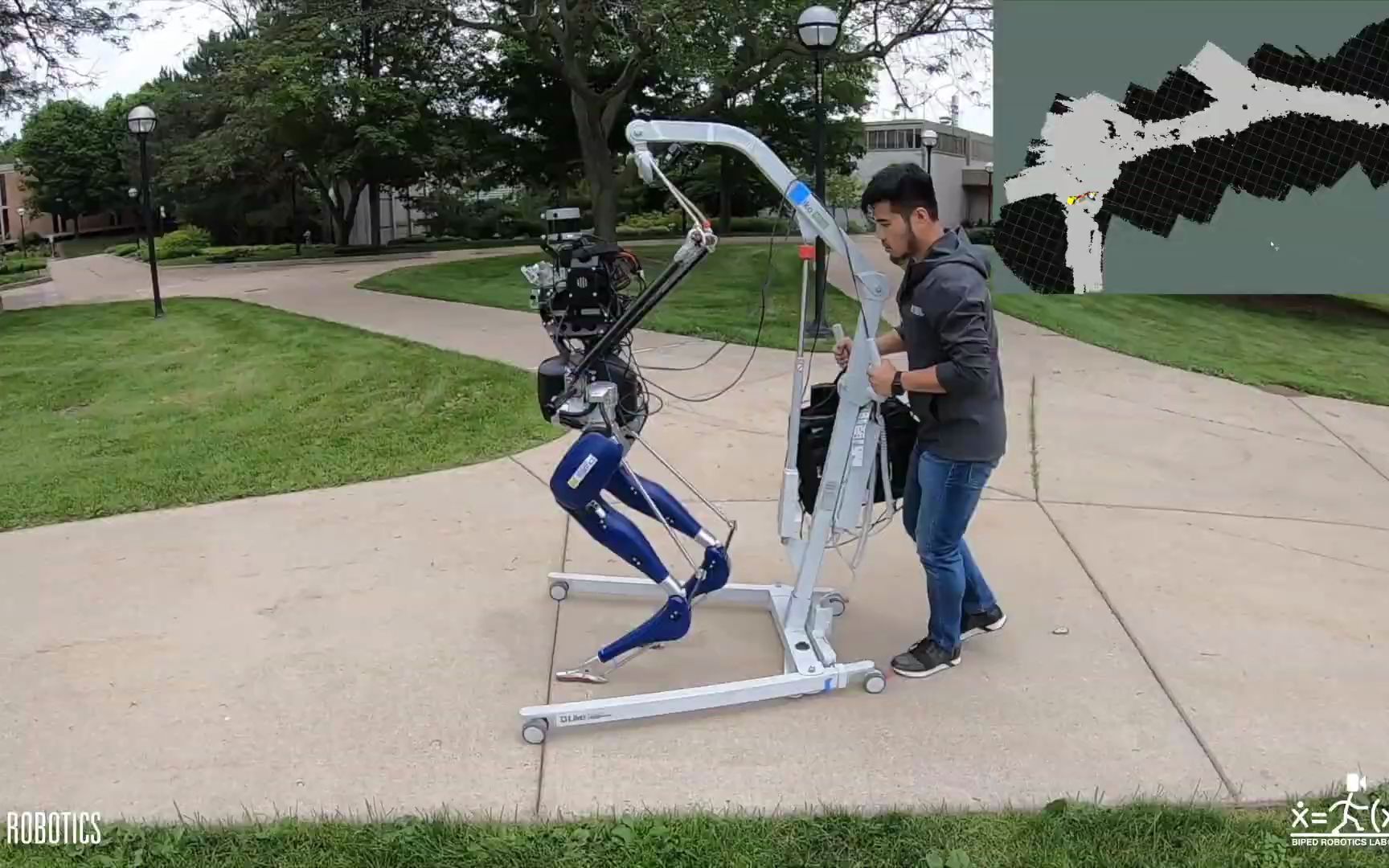
2019-01-13 10:50:107666 雙足機器人Cassie,一直以其獨特的腿部造型,與輕盈的步態備受機器人界的關注。人們甚至認為這種先進的行走步態和Atlas相比并沒有遜色很多,只是空有一雙大長腿,總是感覺怪怪的。不過,從Agility Robotics最新公布的消息來看,近日Cassie終于長出了上半身,并取名為Digit。
2019-03-04 11:10:077126 本文檔的主要內容詳細介紹的是雙足機器人STL 3D模型詳細資料合集免費下載。
2019-04-29 08:00:0013 供電采用的是 AD/DC 電源適配器,只要插上就不用擔心電壓的問題。控制板上的 USB 接口是用來下載程序,動作組或者調試用的,只需接到電腦上,打開相應的上位機即可。脫機按鍵,當按下時雙足會運行 100 號動作組(動作號可在程序中修改)。總線接口,接串口
2019-05-31 08:00:006 用無人汽車、無人機送快遞這些事情,相信大家都聽得多了。但是大家在驚嘆、拍手之余,有沒有想過這個問題:
無人汽車把快遞送到你家門口后?誰把快遞從車上拿出來送到你家門口?難道還要在無人汽車上,再配備一個快遞員?
近日,福特就對外發布了它們的一款雙足送貨機器人,旨在解決無人送貨最后一里路的問題。
2019-06-01 10:04:583042 人類都很難駕馭的漂移板,卻被加州大學伯克利分校的雙足機器人Cassie輕松實現,直行、轉彎、高速行駛都不在話下。
2019-06-10 09:47:523273 美國航空航天局共制造四臺Valkyrie機器人,已經送出去三臺。其中兩臺機器人分別借給美國東北大學和麻省理工學院,而第四臺機器人被蘇格蘭愛丁堡大學收購。通過互惠互利的方式,這些機構的機器人和工程專業學生有機會近距離接觸了解前沿的機器人。
2019-08-22 15:59:4610353 在我的情況下,我選擇使用電池為機器人供電。我用螺絲和螺母將兩個電池座固定在機器人背面。我在每個支架上使用了兩個18650系列電池(這樣做電壓為7.4V)。然后將電池組并聯連接以具有更大的電流來驅動
2019-09-04 17:01:258702 本文為一個名叫Besiding的雙足機器人建立了完整的力學模型和控制模型,使機器人能在平面上實現穩定的動態行走。并且對模型的可靠性和實用性進行了仿真計算,結果證實了文中模型的合理性和可行性。這個名為Besiding的機器人有10個自由度,從機械學的角度看,其結構能實現基本的步行動作。
2019-12-24 11:23:0022 智能假肢研發過程中,需要殘疾人裝配假肢進行實驗。由于殘疾人身體有缺陷,不可能作大量、多樣及重復性的實驗,這無疑會影響智能假肢的研發進度。異構雙足機器人(Biped Robot with Heterogeneous Legs, BRHL)是一種新型的機器人模式,它為研究智能假肢提供了一個新的研究平臺。
2019-12-24 16:36:0315 雙足步行機器人是真正字面意義上或狹義的“機器人”,其研究和發展代表了機器人學的尖端水平。其中最重要的概念是零力矩點(Zero-MomentPoint,簡記ZMP)。本文基于雙足步行機器人ZMP控制與動力學模型,取得了以下主要的研究成果: 首先,本文分析了雙足機器人動態步行過程的運動學特征。
2019-12-31 16:51:0031 1月6日,據外媒報道,美國創業公司Agility Robotics宣布其雙足機器人Digit現已開售,這是一款可以應用在物流行業(包括上下樓梯)的雙足機器人產品。
2020-01-06 15:27:421154 1月6日,據外媒報道,美國創業公司Agility Robotics宣布其雙足機器人Digit現已開售,這是一款可以應用在物流行業(包括上下樓梯)的雙足機器人產品。
2020-01-06 15:29:593697 雙足機器人是與人類最接近的一種機器人,其關鍵技術就是雙足步行,最大的特征就是能像人類一樣行走,可以完成人類基本的運動功能,盡管目前在仿人機器人領域已經取得了很大的成果,但相對于人類行走,怎樣提高在行走過程中步態的穩定性、靈活性、行走速度以及獨立性等仍然是個很大的挑戰。
2020-01-08 14:35:5829 仿人雙足機器人是機器人研究的前沿領域,是多種科技的結合,代表一個國家的技術水平。仿人雙足機器人最大的特征就是雙足步行,因此它的靈活性很高,可以代替人類完成危險作業。
2020-01-15 10:31:0020 足式機器人的運動具有足與地面非連續接觸的特點,這使得它對不平路面環境的適應性較強,可以應用在探險救災等危險的任務中。與四足及六足機器人相比,雙足機器人足部與地面的接觸支撐面積較小,使其具有更高
2020-01-17 14:19:5415 雙足機器人足底壓力的大小與受力位置是其步行運動中的重要參數,但由于地面環境的復雜性,通過機器人本體參數間接地計算足底壓力的大小與受力位置是十分困難的,因此研制一種足底壓力測量傳感系統來檢測足底壓力的大小與受力位置是解決這個問題的有效手段。
2020-03-03 17:04:3820 6自由度雙足機器人是模仿人類的下肢運動制作的機器人。使用了3對舵機,分別模仿人體下肢的臀關節、膝關節、踝關節。
2020-03-12 15:49:0012 年的歷史,但是由于它獨特的適應性和擬人性,成為了機器人領域的一個重要發展方向。課題旨在設計一種雙足人形機器人平臺,在此基礎上對雙足機器人的步行機理進行研究,為進一步設計自主的智能雙足人形機器人積累經驗。本文首先
2020-03-12 16:15:0015 早已習以為常。表面上看這種雙足運動形式很簡單,但是研究者研究后發現要想在仿人形機器人身上實現類似于人類那樣自由、穩定、快速的行走并不是一件容易的事情。
2020-03-17 16:06:5024 雙足機器人的相關研究自仿生機器人出現就同步進行。隨著嵌入式芯片的發展,更高效率的控制器的出現使研究人員能夠更加靈活的實現雙足機器人的控制。相比其他種類的機器人,雙足機器人具有運動靈活,適用性強等
2020-03-18 15:19:4728 液壓雙足機器人由于具有高負載、快速動態響應等優點,逐漸地應用于軍事、救災等復雜危險的任務中。設計一個穩定、高效的運動數據感知獲取系統并實現數據可視化顯示,對雙足機器人的步態規劃、運動控制以及運動狀態
2020-03-19 16:03:396 對各種行走環境的較強適應能力是雙足步行的一個重要性能,這也是雙足機器人相對于輪式機器人的優點之一。樓梯是人類生活環境中常見的行走環境,具有爬樓能力是雙足機器人應具有的基本功能。本文針對雙足機器人
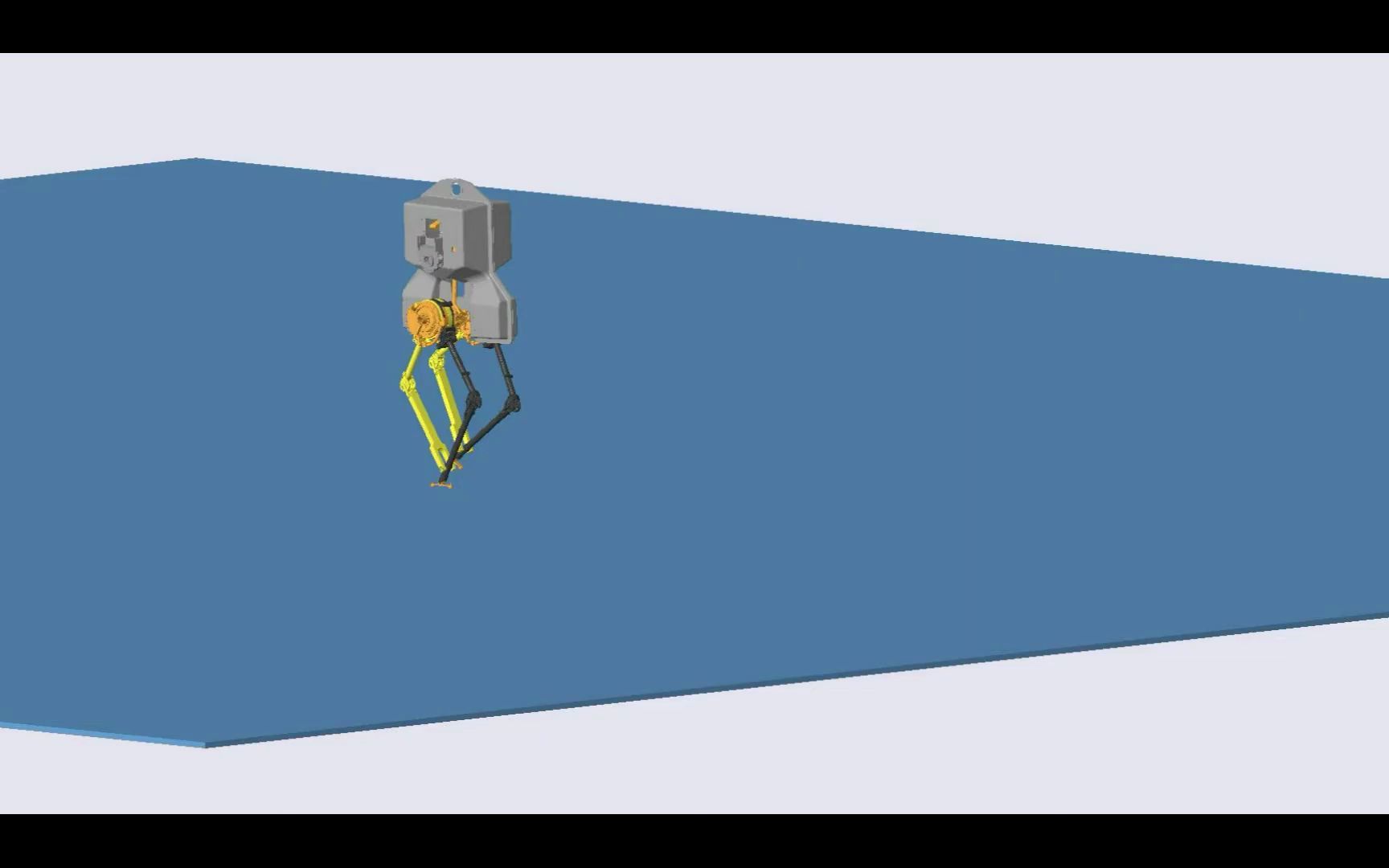
2020-04-07 16:27:3234 在了解了許多雙足機器人的下肢結構之后,我注意到了敏捷機器人公司的ATRIAS機器人,它的腿在一條直線上,比串聯起來更簡單。同時,在分析了成熟的DELTA折疊式機械手工作原理的基礎上,提出了DELTA
2020-12-07 09:47:133174 雙足機器人的進化再往前一步
2021-03-25 10:44:272992 的 “雙足機器人使命”。 今年 36 歲的付春江生于遼寧鞍山,本科畢業于華東理工大學信息學院及認知神經動力學研究所,畢業后東渡日本來到大阪大學讀博,主要研究雙足行走控制,期間師從日本生體工學權威專家野村泰伸教授。 畢業后,先
2021-06-25 09:19:502796 可以飛可以走的雙足機器人 可以飛行又可以行走的雙足機器人正式亮相,它擁有一雙多關節的腿,用于兩足行走,在肩部的螺旋槳推進器使行走更加穩定,同時可以滿足跳躍和飛行的功能,可謂是創造出一種新的機器人運動
2022-04-08 10:40:232307 1.舵機齒請勿用手掰(包括裝上擺臂后掰擺臂,如果掰擺臂導致牙箱卡死,請自行修復),舵機包括回中均需要使用app
2.在將電池裝入主板前務必注意電池的正負極和電池盒的正負極(兩者極性一定要一樣,接反會燒充電芯片)
3.app下載:jkergo.com/download
4.組裝視頻:https://v.youku.com/v_show/id_XNDM4MjgyNzAyMA==.html?spm=a2
2022-10-08 14:26:562 電子發燒友網站提供《帶有Arduino、樂高和3D打印部件的DIY雙足機器人.zip》資料免費下載
2023-06-27 11:44:190 “大圣”面向國內日益升溫的雙足機器人科研教育與產業探索需求,填補大尺寸仿鴕鳥構型雙足機器人產品空白,作為一款高性能與高拓展性的科研教育平臺,為用戶提供廣闊的想象空間。
2023-08-08 17:12:052104 
通過持續優化傳感器融合架構,雙足機器人的環境適應性將進一步提升,為災難救援、社會服務等場景提供可靠技術支持。
2025-08-25 15:08:331000 
材質識別MEMS超聲波傳感器通過聲學特性分析,為雙足機器人提供了獨特的環境感知維度。其在步態適應性、防滑控制及能耗優化方面的作用,已成為復雜環境下穩健行走的關鍵使能技術。隨著MEMS工藝與算法融合的深入,雙足機器人的環境適應性將邁向新高度。
2025-08-25 15:12:10807
 電子發燒友App
電子發燒友App























 工商網監
工商網監
評論