我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2018-02-06 08:49:06 15411
15411 
基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教是一種常用的機(jī)器人控制策略,它允許人與機(jī)器人直接互動(dòng),實(shí)現(xiàn)自然、直觀的控制。在導(dǎo)納控制中,機(jī)器人被建模為一個(gè)力控制系統(tǒng),其動(dòng)力學(xué)特性由一個(gè)等效的導(dǎo)納(Admittance)模型描述。導(dǎo)納模型類似于彈簧和阻尼器的組合,用來(lái)描述機(jī)器人對(duì)外部力和運(yùn)動(dòng)的響應(yīng)。
2023-12-04 09:48:338088 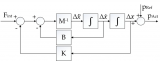
機(jī)器人編程需要什么軟件
2023-11-01 07:34:30
在前一篇文章中講了機(jī)器人與編程的區(qū)別,但總感覺(jué)講的比較空泛,這篇文章繼續(xù)講講那些區(qū)別。計(jì)算機(jī)編程和機(jī)器人編程最大的區(qū)別就是一個(gè)是控制虛擬的,一個(gè)是真實(shí)世界的東西。計(jì)算機(jī)編程,你控制一個(gè)角色直走100
2021-09-01 07:12:05
1、機(jī)器人的控制系統(tǒng)“控制”的目的是使被控對(duì)象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對(duì)象的特性。 “實(shí)質(zhì)”是對(duì)驅(qū)動(dòng)器輸出力矩的控制。2、機(jī)器人示教原理機(jī)器人的基本工作原理是示教
2021-09-13 08:40:55
目前產(chǎn)業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,缺乏對(duì)環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺(jué)控制,不需要預(yù)先對(duì)產(chǎn)業(yè)機(jī)器人的運(yùn)動(dòng)軌跡進(jìn)行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
ABB機(jī)器人示教器控制器故障維修蘇州吉海機(jī)電設(shè)備有限公司機(jī)器人維修中心,ABB機(jī)器人示教器控制器故障維修 蘇州吉海是一家專業(yè)的自動(dòng)化工控產(chǎn)品維修企業(yè),公司有充足的備件和優(yōu)良的維修工程師,可為客戶提供
2020-10-12 15:43:12
歡迎關(guān)注Jungle的Motoman機(jī)器人離線編程專欄系列文章:Motoman機(jī)器人離線編程——Motocom32開(kāi)發(fā)簡(jiǎn)介Motoman機(jī)器人離線編程——Visio Studio環(huán)境配置
2021-09-07 07:33:42
ZNH-KH01工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備有什么功能?ZNH-KH01工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備是由哪些部分組成的?
2021-08-16 07:45:01
[亞信線上教學(xué)] AxRobot機(jī)器手臂示教編程教學(xué)視頻I -- 離線編程亞信電子AX58200 AxRobot支持離線與線上機(jī)器手臂示教編程功能。這個(gè)視頻介紹AX58200 AxRobot
2022-03-08 10:07:30
得到了廣泛的應(yīng)用,在我國(guó)有大量的需求,工業(yè)機(jī)器人系統(tǒng)包括:機(jī)器人示教器、控制器、機(jī)器人本體三部分組成。本課題所研究的是:基于可裁剪的WinCE6.0嵌入式操作系統(tǒng)的一種基于WinCE的工業(yè)機(jī)器人示教器
2015-07-23 22:14:55
、離線編程仿真單元及安全防護(hù)設(shè)施等部分組成。集成多種機(jī)器人工業(yè)應(yīng)用案例,實(shí)現(xiàn)工業(yè)機(jī)器人應(yīng)用多功能教學(xué)實(shí)操。包含教學(xué)內(nèi)容有機(jī)器人基本結(jié)構(gòu)、基本操作、參數(shù)配置、示教編程、簡(jiǎn)單語(yǔ)言編程等基礎(chǔ)實(shí)操、復(fù)雜軌跡
2021-07-01 13:43:02
軟件編程界面和運(yùn)行環(huán)境。重、難點(diǎn)重點(diǎn):機(jī)器人仿真軟件編程界面的操作。難點(diǎn):機(jī)器人仿真軟件運(yùn)行環(huán)境的操作。教學(xué)過(guò)程走進(jìn)機(jī)器人世界機(jī)器人的誕生機(jī)器人的發(fā)展機(jī)器人家族認(rèn)識(shí)能力風(fēng)暴智能機(jī)器人腳...
2021-09-01 06:17:46
機(jī)器人的主要技術(shù)功能被稱為“可編程”和“示教再現(xiàn)”。1962年美國(guó)推出的一些工業(yè)機(jī)器人的控制方式與數(shù)控機(jī)床大致相似,但外形主要由類似人的手和臂組成。后來(lái),出現(xiàn)了具有視覺(jué)傳感器的、能識(shí)別與定位的工業(yè)機(jī)器人
2015-01-19 10:58:38
細(xì)小復(fù)雜部位需要人工補(bǔ)裝、且只適合平板工件。第三種是智能機(jī)器人,它解決了復(fù)雜工件,雖在一定程度上實(shí)現(xiàn)了離線編程,但編程速度較慢,運(yùn)動(dòng)軌跡柔性且慢、需要技術(shù)人才編程、示教,以及后期保養(yǎng)苛刻。現(xiàn)有的噴涂機(jī)器人
2021-03-10 09:23:59
目錄概述行走軸模型拆分行走軸模型導(dǎo)入仿真軟件創(chuàng)建行走軸機(jī)械裝置外部軸配置向?qū)Р寮惭b虛擬機(jī)器人系統(tǒng)創(chuàng)建行走軸系統(tǒng)配置機(jī)器人安裝到行走軸行走軸運(yùn)動(dòng)控制文已經(jīng)首發(fā)在個(gè)人微信公眾號(hào):工業(yè)機(jī)器人仿真與編程
2021-09-07 08:57:47
ZNH-KH01工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備一、概述工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備能滿足工業(yè)機(jī)器人應(yīng)用編程1+X相關(guān)標(biāo)準(zhǔn)及技術(shù)規(guī)范,設(shè)備使用智能連接器連接,整個(gè)車間設(shè)備互聯(lián)互通,實(shí)現(xiàn)大數(shù)據(jù)交換。二、工業(yè)
2021-07-01 11:06:26
模塊化的控制系統(tǒng)體系結(jié)構(gòu):采用分布式CPU計(jì)算機(jī)結(jié)構(gòu),分為機(jī)器人控制器(RC),運(yùn)動(dòng)控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機(jī)器人控制器(RC)和編程示教盒通過(guò)串口/CAN總線
2018-11-23 10:40:38
手機(jī)同步微信:185 5025 5583 昆山蘇州上海回收示教器ABB示教器庫(kù)卡示教器發(fā)那科示教器高價(jià)回收全新發(fā)那科機(jī)器人示教器回收發(fā)那科示教器出售現(xiàn)貨 回購(gòu)回收ABB機(jī)器人示教器回收kuka機(jī)器人
2020-06-20 08:07:44
就是想問(wèn)下,機(jī)器人關(guān)機(jī)的時(shí)候,是不是要等到示教器出現(xiàn)到“connect……”畫(huà)面之后才可以斷電,還是在示教器上選擇了關(guān)機(jī)后,馬上就可以斷電?
2015-01-16 10:30:00
焊接機(jī)器人的原理:焊接機(jī)器人是一種高度自動(dòng)化的設(shè)備,焊接機(jī)器人的基本工作原理是示教再現(xiàn),即由用戶導(dǎo)引機(jī)器人,一步步按實(shí)際任務(wù)操作一遍,機(jī)器人在導(dǎo)引過(guò)程中自動(dòng)記憶示教的每個(gè)動(dòng)作的位置、姿態(tài)、運(yùn)動(dòng)參數(shù)
2020-11-16 16:18:45
自己開(kāi)發(fā)的機(jī)器人圖形化編程軟件從2005年起就開(kāi)始搞機(jī)器人教學(xué)了,至今每年夏天都舉行機(jī)器人夏令營(yíng)。10年來(lái)一直嘗試做一款簡(jiǎn)單穩(wěn)定好用的機(jī)器人編程軟件,上次做的類似于app inventor 的積木
2016-07-02 20:15:27
萌新求助,求機(jī)器人編程的案列
2021-10-21 07:27:29
(機(jī)器編程系列文章二)嵌入君上一篇《機(jī)器人程序員正朝我們走來(lái),大家準(zhǔn)備好了嗎?》文章中,談到了我個(gè)人的觀點(diǎn),在一個(gè)編程平臺(tái)中,是否算是機(jī)器編程,需要看機(jī)器完成的代碼占總編碼的量和對(duì)編程人員的技術(shù)要求
2021-09-09 06:45:54
變得更加普遍,同時(shí),它們所具有的功能也會(huì)越來(lái)越多。機(jī)器人示教器是機(jī)器人控制系統(tǒng)中的重要組成部分,主要實(shí)現(xiàn)用戶與機(jī)器人控制器,用戶與機(jī)器人本體之間的通信。機(jī)器人控制器接收到示教器的運(yùn)動(dòng)指令后經(jīng)過(guò)譯碼、邏輯
2017-03-16 14:42:26
雅馬哈機(jī)器人編程手冊(cè)
2021-02-04 12:27:32
和YAMAHA的SCARA機(jī)器人示教、手動(dòng)操縱、工具及用戶坐標(biāo)系的定義及建立、I/O及配置、指令與編程等實(shí)用內(nèi)容。基于具體案例,講解了機(jī)器人系統(tǒng)的編程、調(diào)試、自動(dòng)生產(chǎn)的過(guò)程。通過(guò)學(xué)習(xí)本書(shū),使讀者對(duì)工業(yè)
2018-10-29 17:03:22
TA6-R5協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足負(fù)荷的需求
2023-04-17 17:49:50
深圳泰科智能TA6系列協(xié)作機(jī)器人是泰科智能自主研發(fā)的6自由度的協(xié)作機(jī)器人,具有拖動(dòng)示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設(shè)計(jì)的RJS系列關(guān)節(jié)模組,既輕便靈活、運(yùn)行平滑柔順,同時(shí)滿足
2023-04-19 11:14:26
泰克機(jī)器人示教仿真軟件視頻(孫斌,段晉軍)
2013-09-17 10:02:02 74
74 EPSON機(jī)器人編程更請(qǐng)看SPEL 語(yǔ)言。
2016-05-09 09:41:4122 隨著機(jī)器人應(yīng)用領(lǐng)域越來(lái)越廣,傳統(tǒng)的示教編程這種編程手段有些場(chǎng)合變得效率非常低下,于是離線編程應(yīng)運(yùn)而生,并且應(yīng)用越來(lái)越普及。但初用離線編程的朋友,總會(huì)被最后生成軌跡的誤差所困惑,而導(dǎo)致這些誤差的原因
2016-07-28 15:06:473420 機(jī)器人編程文檔,感興趣的可以看看。
2016-12-14 15:07:031 LogenStudio機(jī)器人離線仿真編程軟件8-5
2016-12-25 21:34:570 來(lái)自北京華航唯實(shí)的技術(shù)團(tuán)隊(duì)研發(fā)了國(guó)內(nèi)首款機(jī)器人離線編程軟件RobotArt,RobotArt利用成熟的CAD/CAM技術(shù),結(jié)合工業(yè)機(jī)器人離線編程技術(shù),形成了機(jī)器人離線編程系統(tǒng),提高機(jī)器人編程效率
2017-01-06 11:16:1110502 
碼垛機(jī)器人示教器的設(shè)計(jì)與實(shí)現(xiàn)_朱琳
2017-01-18 20:24:573 系統(tǒng)中。 這就對(duì)現(xiàn)階段的機(jī)器人技術(shù)提出了要求,其中,示教技術(shù)就是重要的一項(xiàng)。機(jī)器人示教技術(shù)指的是通過(guò)編程指揮機(jī)器人去完成某一具體任務(wù)。編程的過(guò)程即為示教過(guò)程。 ABB機(jī)器人示教器(FlexPendant)由硬件和軟件組成,其本
2017-09-29 16:59:088 滿足日益增長(zhǎng)的復(fù)雜性要求,機(jī)器人不僅要能長(zhǎng)期穩(wěn)定地完成重復(fù)工作,還要具備智能化、網(wǎng)絡(luò)化、開(kāi)放性、人機(jī)友好性的特點(diǎn)。作為工業(yè)機(jī)器人繼續(xù)發(fā)展與創(chuàng)新的一個(gè)重要方面,示教技術(shù)正在向利于快速示教編程和增強(qiáng)人機(jī)協(xié)作能力的方向發(fā)展。 工
2017-10-09 16:03:051 機(jī)器人研究經(jīng)歷了3 個(gè)階段,即示教再現(xiàn)編程階段、離線編程階段和自主編程階段。因技術(shù)尚不成熟,目前,在國(guó)內(nèi)外生產(chǎn)中應(yīng)用的機(jī)器人系統(tǒng)大多處于示教再現(xiàn)編程階段。本實(shí)驗(yàn)室采用首鋼莫托曼公司生產(chǎn)的弧焊機(jī)器人
2017-10-13 16:03:1010 機(jī)器人編程【robot programming】為使機(jī)器人完成某種任務(wù)而設(shè)置的動(dòng)作順序描述。機(jī)器人運(yùn)動(dòng)和作業(yè)的指令都是由程序進(jìn)行控制,常見(jiàn)的編制方法有兩種,示教編程方法和離線編程方法。其中示教編程
2017-11-17 15:59:4315 機(jī)器人編程為使機(jī)器人完成某種任務(wù)而設(shè)置的動(dòng)作順序描述。機(jī)器人運(yùn)動(dòng)和作業(yè)的指令都是由程序進(jìn)行控制,常見(jiàn)的編制方法有兩種,示教編程方法和離線編程方法。
2017-11-24 15:32:277492 對(duì)工業(yè)機(jī)器人來(lái)說(shuō),主要有三類編程方法:在線編程、離線編程以及自主編程三類。在當(dāng)前機(jī)器人的應(yīng)用中,手工示教仍然主宰著整個(gè)機(jī)器人焊接領(lǐng)域,離線編程適合于結(jié)構(gòu)化焊接環(huán)境,但對(duì)于軌跡復(fù)雜的三維焊縫,手工示教
2018-01-31 13:34:089435 針對(duì)當(dāng)前工業(yè)機(jī)器人示教中,虛擬示教方式存在場(chǎng)景真實(shí)度低、靈活性差等問(wèn)題,對(duì)T業(yè)機(jī)器人的虛擬示教進(jìn)行了研究,應(yīng)用虛擬現(xiàn)實(shí)技術(shù),提出了一種面向ABB IRB4600系列機(jī)器人的虛擬示教設(shè)計(jì)方法。分析了
2018-02-26 10:19:372 本文開(kāi)始詳細(xì)介紹了焊接機(jī)器人的編程技巧,其次介紹了安川焊接機(jī)器人編程教程,最后闡述了焊接機(jī)器人的示教編程與離線編程區(qū)別及焊接機(jī)器人應(yīng)用中存在的問(wèn)題和解決的措施。
2018-02-28 13:43:4190268 
工業(yè)機(jī)器人示教編程和離線編程,有何區(qū)別?
2018-03-05 15:59:5221207 我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2018-04-02 10:59:4411267 
機(jī)器人的主要特點(diǎn)之一是其通用性,是機(jī)器人具有可編程能力是實(shí)現(xiàn)這一特點(diǎn)的重要手段。機(jī)器人編程必然涉及機(jī)器人語(yǔ)言。機(jī)器人語(yǔ)言是使用符號(hào)來(lái)描述機(jī)器人動(dòng)作的方法,它通過(guò)對(duì)機(jī)器人的描述,使機(jī)器人按照編程者的意圖進(jìn)行各種操作。
2018-05-01 17:32:0036323 多傳感器融合技術(shù)的建模與仿真。隨著機(jī)器人智能化的提高,傳感器技術(shù)在機(jī)器人系統(tǒng)中的應(yīng)用越來(lái)越重要。因而需要在離線編程系統(tǒng)中對(duì)多傳感器進(jìn)行建模,實(shí)現(xiàn)多傳感器的通訊,執(zhí)行基于多傳感器的操作。
2018-05-10 15:02:256915 一般來(lái)說(shuō),操作FANUC機(jī)器人時(shí),需要使用FANUC示教器iPendant來(lái)對(duì)機(jī)器人進(jìn)行示教、做信號(hào)配置等。對(duì)于熟練使用示教器的用戶來(lái)說(shuō),示教器就是他們控制機(jī)器人的工具。沒(méi)有示教器,還能控制機(jī)器人嗎?答案是肯定的。
2018-05-30 16:09:2512115 
離線編程,我的理解就是在離線編程系統(tǒng)的軟件中通過(guò)鼠標(biāo)和鍵盤(pán)操作機(jī)器人的三維圖形做事情(對(duì)比在線示教通過(guò)示教器控制機(jī)器人)。 典型的離線編程系統(tǒng)軟件架構(gòu)包括建模模塊、布局模塊、編程模塊和仿真模塊。
2018-07-28 10:01:5410373 示教器是進(jìn)行機(jī)器人的手動(dòng)操縱、程序編寫(xiě)、參數(shù)配置以及監(jiān)控用的手持裝置。
2018-08-10 09:42:2969379 目前工業(yè)機(jī)器人僅能在嚴(yán)格定義的結(jié)構(gòu)化環(huán)境中執(zhí)行預(yù)定指令動(dòng)作,缺乏對(duì)環(huán)境的感知與應(yīng)變能力,這極大地限制了機(jī)器人的應(yīng)用。利用機(jī)器人的視覺(jué)控制,不需要預(yù)先對(duì)工業(yè)機(jī)器人的運(yùn)動(dòng)軌跡進(jìn)行示教或離線編程,可節(jié)約大量的編程時(shí)間,提高生產(chǎn)效率和加工質(zhì)量。
2018-10-08 14:18:005180 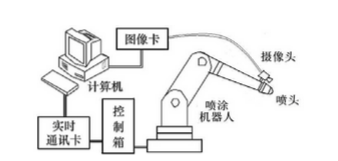
通常來(lái)講,機(jī)器人編程可分為示教在線編程和離線編程。我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2018-09-25 17:48:0014925 機(jī)器人的開(kāi)發(fā)語(yǔ)言一般為C、C++、C++ Builder、VB、VC等語(yǔ)言,主要取決于執(zhí)行機(jī)構(gòu)(伺服系統(tǒng))的開(kāi)發(fā)語(yǔ)言;而機(jī)器人編程分為示教、動(dòng)作級(jí)機(jī)器人編程語(yǔ)言、任務(wù)級(jí)編程語(yǔ)言三個(gè)級(jí)別。
2018-10-19 10:36:408596 通常來(lái)講,機(jī)器人編程可分為示教在線編程和離線編程。我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2018-10-24 11:43:3711465 通常來(lái)講,機(jī)器人編程可分為示教在線編程和離線編程。我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析
2019-01-01 11:21:004452 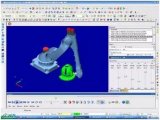
作為并聯(lián)機(jī)器人繼續(xù)發(fā)展與創(chuàng)新的一個(gè)重要方面,拖動(dòng)示教的應(yīng)用將為并聯(lián)機(jī)器人調(diào)試技術(shù)趨向快速、簡(jiǎn)便的方向發(fā)展。秉承不斷創(chuàng)新突破自我的勃肯特,在11月正式通過(guò)拖動(dòng)示教在并聯(lián)機(jī)器人上的內(nèi)部測(cè)試,實(shí)現(xiàn)該項(xiàng)技術(shù)在并聯(lián)機(jī)器人應(yīng)用的零突破。
2018-12-07 17:14:081705 我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2019-01-21 17:27:004679 
機(jī)器人來(lái)說(shuō),主要有三類編程方法:在線編程、離線編程以及自主編程三類。在當(dāng)前機(jī)器人的應(yīng)用中,手工示教仍然主宰著整個(gè)機(jī)器人焊接領(lǐng)域,離線編程適合于結(jié)構(gòu)化焊接環(huán)境,但對(duì)于軌跡復(fù)雜的三維焊縫,手工示教不但費(fèi)時(shí)
2019-03-05 17:39:072157 機(jī)器人編程為使機(jī)器人完成某種任務(wù)而設(shè)置的動(dòng)作順序描述。示教是機(jī)器人編程的一種重要方式,通過(guò)預(yù)先設(shè)置好機(jī)器人要達(dá)到的位置,以指令描述出來(lái)。本手冊(cè)旨在幫助讀者學(xué)習(xí)和掌握匯川的機(jī)器人示教軟件 InoTeachPad 的編程方法。
2019-03-12 08:00:002 通常來(lái)講,機(jī)器人編程可分為示教在線編程和離線編程。我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2019-05-13 16:15:139573 我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
2019-05-14 16:53:044329 機(jī)器人編程【robotprogramming】為使機(jī)器人完成某種任務(wù)而設(shè)置的動(dòng)作順序描述。機(jī)器人運(yùn)動(dòng)和作業(yè)的指令都是由程序進(jìn)行控制,常見(jiàn)的編制方法有兩種,示教編程方法和離線編程方法。
2019-08-15 17:41:3218536 工業(yè)機(jī)器人編程怎么入門(mén)呢?這是一個(gè)值得探討的問(wèn)題,隨著工業(yè)機(jī)器人使用量的不斷增加,人們對(duì)工業(yè)機(jī)器人系統(tǒng)也有了初步的了解。眾所周知,針對(duì)不同的工件需及時(shí)更改機(jī)器人編程,才能保質(zhì)保量的完成生產(chǎn)任務(wù)。下面就為大家?guī)?lái)工業(yè)機(jī)器人編程的相關(guān)知識(shí)。
2019-10-15 14:41:4510769 本文檔的主要內(nèi)容詳細(xì)介紹的是工業(yè)機(jī)器人的詳細(xì)資料和應(yīng)用編程等培訓(xùn)資料概述包括了:1.掌握機(jī)器人的特征和分類;,2.了解機(jī)器人的歷史、現(xiàn)狀和發(fā)展;,3.熟悉工業(yè)機(jī)器人的結(jié)構(gòu)和原理;,4.了解工業(yè)機(jī)器人工作過(guò)程,能進(jìn)行示教基本操作;,5.了解工業(yè)機(jī)器人編程方式和語(yǔ)言特征。
2019-10-31 11:15:3639 當(dāng)前的機(jī)器人被廣泛用于焊接、裝配、搬運(yùn)及打磨等領(lǐng)域,所完成的工作越來(lái)越復(fù)雜,在這種形式下機(jī)器人的編程方式、編程效率和質(zhì)量就顯得越來(lái)越重要了。本文就給大家介紹下工業(yè)機(jī)器人編程語(yǔ)言,以及工業(yè)機(jī)器人的編程方式。
2020-05-13 16:11:457413 對(duì)于機(jī)器人的學(xué)習(xí)者和技術(shù)員來(lái)說(shuō),學(xué)習(xí)一款機(jī)器人后對(duì)自學(xué)其他機(jī)器人應(yīng)能觸類旁通,在各大機(jī)器人品牌中 FANUC機(jī)器人的編程、示教、使用規(guī)范是最細(xì)致的,學(xué)習(xí) FANUC機(jī)器人編程后自學(xué)其他品牌的機(jī)器人會(huì)變得輕松。
2020-06-10 14:37:563497 機(jī)器人編程為使機(jī)器人完成某種任務(wù)而設(shè)置的動(dòng)作順序描述。機(jī)器人運(yùn)動(dòng)和作業(yè)的指令都是由程序進(jìn)行控制,常見(jiàn)的編制方法有兩種,示教編程方法和離線編程方法。其中示教編程方法包括示教、編輯和軌跡再現(xiàn),可以通過(guò)
2020-07-23 11:42:4845501 隨著科技的進(jìn)步,越來(lái)越多企業(yè)都轉(zhuǎn)型往智能制造行業(yè)方向發(fā)展了,這也是工業(yè)機(jī)器人為什么會(huì)快速普及的原因了,就拿拖動(dòng)示教噴涂機(jī)器人來(lái)說(shuō),它具有免編程噴涂、噴涂質(zhì)量高、效率高以及回報(bào)率高等優(yōu)勢(shì)特點(diǎn),幫助企業(yè)
2020-08-11 09:52:032050 的編程方法主要有三種: 1)示教編程,是一項(xiàng)成熟的技術(shù),它是目前大多數(shù)工業(yè)機(jī)器人的編程方式,采用這種方法,程序編制是在機(jī)器人現(xiàn)場(chǎng)進(jìn)行的。 2)離線編程,是在專門(mén)的軟件環(huán)境下,用專用或通用程序在離線情況下進(jìn)行機(jī)器
2020-09-25 11:42:337314 極簡(jiǎn)單,快速部署便捷示教。基于節(jié)卡機(jī)器人首創(chuàng)無(wú)線示教和圖形化編程技術(shù),用戶可在PAD、手機(jī)等移動(dòng)終端對(duì)機(jī)器人進(jìn)行實(shí)時(shí)遠(yuǎn)程操控和作業(yè)編輯。
2020-10-10 16:19:072626 對(duì)工業(yè)機(jī)器人來(lái)說(shuō),主要有三類編程方法:在線編程、離線編程以及自主編程三類。
2020-11-10 17:47:2521887 通常來(lái)講,機(jī)器人編程可分為示教在線編程和離線編程。我們今天講解的重點(diǎn)是離線編程,通過(guò)示教在線編程在實(shí)際應(yīng)用中主要存在的問(wèn)題,來(lái)說(shuō)說(shuō)機(jī)器人離線編程軟件的優(yōu)勢(shì)和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。示教在線編程在實(shí)際應(yīng)用中主要存在以下問(wèn)題1、示教在線編程過(guò)程繁瑣、效率低
2020-12-26 09:10:551793 機(jī)器人編程是以調(diào)用編程模塊指令讓機(jī)器動(dòng)起來(lái)為目的。通常需要編程的模塊是已經(jīng)寫(xiě)好存儲(chǔ)在模塊里的,格物斯坦表示:小朋友做的只是將模塊以不同的方式拼接起來(lái)。兒童編程學(xué)習(xí)是探究編程語(yǔ)言的本質(zhì),一層一層把模塊
2021-03-12 16:44:051396 焊接機(jī)器人的編程人員的工作內(nèi)容是什么?焊接機(jī)器人作為用于焊接作業(yè)的自動(dòng)化焊接設(shè)備,在各領(lǐng)域中深受歡迎,焊接機(jī)器人可以實(shí)現(xiàn)焊接過(guò)程自動(dòng)化,焊接機(jī)器人的出現(xiàn)也提供了很多工作崗位,編程工作是焊接操作的重要一步,需要技術(shù)人員進(jìn)行離線編程工作,帶您了解焊接編程的內(nèi)容。
2021-07-02 17:49:112622 基于深度學(xué)習(xí)的機(jī)器人示教系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2021-06-30 15:53:3780 機(jī)器人編程涉及的學(xué)科很多,集成應(yīng)用(機(jī)器人編程和生產(chǎn)工藝)、機(jī)器人研發(fā)、電子電氣、軟件、機(jī)械、減速機(jī)、傳感器等等。
2021-10-07 07:21:00114958 亞信電子AX58200 AxRobot支持離線與線上機(jī)器手臂示教編程功能。這個(gè)視頻介紹AX58200 AxRobot EtherCAT從站七軸助力控制機(jī)器手臂解決方案的線上示教編程功能
2022-12-05 11:12:002069 焊接機(jī)器人編程方法有什么?所謂焊接機(jī)器人是從事焊接的工業(yè)機(jī)器人,廣泛應(yīng)用于汽車制造、造船、航空等領(lǐng)域。使用機(jī)器人時(shí),首先要做好編程,使機(jī)器人能夠按照既定的程序完成各種操作。焊接機(jī)器人主要有示教編程法、離線編程法、自主編程法三種。
2023-01-13 10:47:0115444 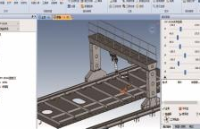
機(jī)器人離線編程,是指操作者在編程軟件里構(gòu)建整個(gè)機(jī)器人工作應(yīng)用場(chǎng)景的三維虛擬環(huán)境,然后根據(jù)加工工藝等相關(guān)需求,進(jìn)行一系列操作,自動(dòng)生成機(jī)器人的運(yùn)動(dòng)軌跡,即控制指令,然后在軟件中仿真與調(diào)整軌跡,最后生成機(jī)器人執(zhí)行程序傳輸給機(jī)器人
2023-02-08 09:53:203428 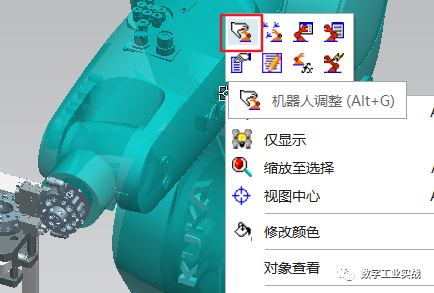
焊接機(jī)器人示教器的作用有哪些?主要用于設(shè)置焊接參數(shù)、焊接路徑、遠(yuǎn)程監(jiān)測(cè)示教減少傷害事故。
2023-02-12 09:27:444668 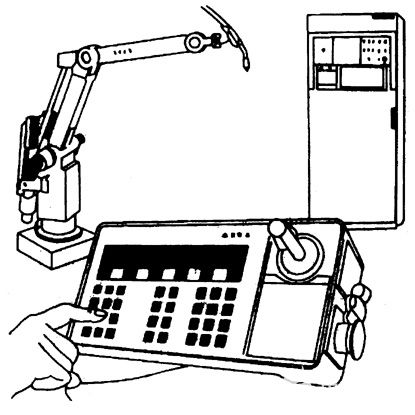
導(dǎo)語(yǔ) HARMO EngSig5.0是一款將示教器功能集成為一體的APP,是海默機(jī)器人的上位機(jī)控制軟件(示教器)。Engsign取代了傳統(tǒng)的笨重手持式機(jī)器人示教器,將示教器功能集成到一款輕巧的APP
2023-05-30 16:40:141468 數(shù)據(jù)、IO分配情況、點(diǎn)動(dòng)機(jī)器人、創(chuàng)建程序、編寫(xiě)機(jī)器人、對(duì)程序進(jìn)行調(diào)試以及讓機(jī)器人投入生產(chǎn)。示教器的優(yōu)勢(shì)特點(diǎn)一、對(duì)非協(xié)作型工業(yè)機(jī)器人進(jìn)行編程,需要使用失能開(kāi)關(guān)。這是一
2022-09-08 17:21:172362 
”是什么?示教器全稱叫做“示教編程器”,是一種應(yīng)用于機(jī)器人控制的手持式裝置。在機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)中,示教器通過(guò)通訊電纜連接控制柜或者運(yùn)動(dòng)控制器,通過(guò)設(shè)置運(yùn)動(dòng)參數(shù)與編寫(xiě)
2023-03-06 13:52:136881 
導(dǎo)語(yǔ)HARMOEngSig5.0是一款將示教器功能集成為一體的APP,是海默機(jī)器人的上位機(jī)控制軟件(示教器)。Engsign取代了傳統(tǒng)的笨重手持式機(jī)器人示教器,將示教器功能集成到一款輕巧的APP當(dāng)中
2023-06-05 10:15:351788 
焊接是一項(xiàng)需要高度精準(zhǔn)和穩(wěn)定性的工作,而傳統(tǒng)手工焊接存在勞動(dòng)強(qiáng)度大、質(zhì)量不穩(wěn)定等問(wèn)題。隨著焊接機(jī)器人的引入,制造業(yè)得以實(shí)現(xiàn)自動(dòng)化、高效率和一致的焊接過(guò)程。而這背后的關(guān)鍵是焊接機(jī)器人的編程。 一、離線
2023-06-25 16:11:451974 工業(yè)機(jī)器人編程 工業(yè)機(jī)器人一般使用的編程語(yǔ)言主要有:基于圖形化編程界面的編程語(yǔ)言,如ABB的RobotStudio;基于高級(jí)編程語(yǔ)言的編程,如C++、Java等;特定領(lǐng)域的編程語(yǔ)言,如KRL
2023-06-26 14:03:151564 焊接機(jī)器人編程方法有什么?所謂焊接機(jī)器人是從事焊接的工業(yè)機(jī)器人,廣泛應(yīng)用于汽車制造、造船、航空等領(lǐng)域。使用機(jī)器人時(shí),首先要做好編程,使機(jī)器人能夠按照既定的程序完成各種操作。焊接機(jī)器人主要有示教編程法、離線編程法、自主編程法三種,下面焊接機(jī)器人廠家無(wú)錫金紅鷹帶大家了解一下焊接機(jī)器人編程的三種方法。
2023-07-13 16:46:143928 
器”是什么? 示教器全稱叫做“示教編程器”,是一種應(yīng)用于機(jī)器人控制的手持式裝置。在機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)中,示教器通過(guò)通訊電纜連接控制柜或者運(yùn)動(dòng)控制器,通過(guò)設(shè)置運(yùn)動(dòng)參數(shù)與編寫(xiě)機(jī)器人的運(yùn)動(dòng)路徑,即可讓機(jī)器人按照編寫(xiě)
2023-07-14 11:45:054791 
焊接機(jī)器人是現(xiàn)代制造業(yè)中廣泛使用的自動(dòng)化設(shè)備,它可以高效、精確地進(jìn)行焊接工作,提高生產(chǎn)效率和焊接質(zhì)量。然而,為了讓機(jī)器人能夠執(zhí)行任務(wù),需要進(jìn)行示教操作,將所需的動(dòng)作和路徑錄入機(jī)器人的控制系統(tǒng)。本文將
2023-08-02 17:56:532240 
?? ? ?示教器通常也叫示教編程器或示教盒,是進(jìn)行機(jī)器人的手動(dòng)操縱、程序編寫(xiě)、參數(shù)配置以及監(jiān)控用的手持裝置;是機(jī)器人控制系統(tǒng)的核心部件,是一個(gè)用來(lái)注冊(cè)和存儲(chǔ)機(jī)械運(yùn)動(dòng)或處理記憶的設(shè)備,該設(shè)備是由
2024-03-23 08:42:231996 ABB工業(yè)機(jī)器人的編程語(yǔ)言主要是RAPID(Robot Application Programming Interface for Development),它是一種高級(jí)編程語(yǔ)言,專門(mén)為工業(yè)機(jī)器人
2024-06-16 16:49:496866 當(dāng)前機(jī)器人廣泛應(yīng)用于焊接、裝配、搬運(yùn)、噴漆及打磨等領(lǐng)域,任務(wù)的復(fù)雜程度不斷增加,而用戶對(duì)產(chǎn)品的質(zhì)量、效率的追求越來(lái)越高。在這種形式下,機(jī)器人的編程方式、編程效率和質(zhì)量顯得越來(lái)越重要。降低編程的難度
2024-08-30 12:14:0111704 
機(jī)器人完成特定的任務(wù)。編程可以手動(dòng)完成,也可以通過(guò)計(jì)算機(jī)輔助設(shè)計(jì)(CAD)軟件自動(dòng)生成。編程方式的選擇取決于任務(wù)的復(fù)雜性、機(jī)器人的類型、以及所需的靈活性和效率。 1. 手動(dòng)編程 1.1 示教編程 直接示教 :操作員直接控制機(jī)器人的
2024-09-04 09:26:173770 工業(yè)機(jī)器人示教器是一個(gè)關(guān)鍵的人機(jī)交互設(shè)備,通過(guò)它操作者可以操作工業(yè)機(jī)器人運(yùn)動(dòng)、完成示教編程、實(shí)現(xiàn)對(duì)系統(tǒng)的設(shè)定、故障診斷等。以下是工業(yè)機(jī)器人示教器上常見(jiàn)按鈕的功能介紹: 一、緊急停止與安全相關(guān)按鈕
2024-09-04 09:44:449992 。 一、什么是示教模式 焊接機(jī)器人示教模式是指通過(guò)手動(dòng)操作機(jī)器人,使其按照預(yù)定的焊接路徑進(jìn)行移動(dòng),并記錄該路徑。該模式下,操作人員可以對(duì)焊接機(jī)器人進(jìn)行編程,使其能夠在自動(dòng)模式下重復(fù)執(zhí)行同樣的焊接任務(wù)。示教模式
2024-09-09 17:55:351451 
隨著拖動(dòng)示教在協(xié)作機(jī)器人、并聯(lián)機(jī)器人上的應(yīng)用,將調(diào)試技術(shù)趨向快速、簡(jiǎn)便的方向發(fā)展,滿足生產(chǎn)企業(yè)應(yīng)用機(jī)器人進(jìn)行及時(shí)、高效的生產(chǎn)需求,以及在工業(yè)4.0和“中國(guó)制造 2025”的背景下,適應(yīng)現(xiàn)代工業(yè)快速
2024-10-23 15:52:162676 
? ? ? 協(xié)作機(jī)器人的拖動(dòng)示教是一種簡(jiǎn)化機(jī)器人編程的方法,通過(guò)人類操作員直接引導(dǎo)機(jī)器人進(jìn)行任務(wù)執(zhí)行,而無(wú)需進(jìn)行復(fù)雜的編程。下面是關(guān)于協(xié)作機(jī)器人拖動(dòng)示教的詳細(xì)解釋。? ? ??拖動(dòng)示教是一種直觀且
2024-10-23 15:52:161472 松下機(jī)器人示教編程教學(xué)課件(新)
2025-06-11 17:23:330
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論