。ZTP800示教器(移動HMI)是廣州致遠電子股份有限公司開發(fā)的最新一代智能機器人示教器(移動HMI),產(chǎn)品在開發(fā)設計過程中,通過了環(huán)境/EMC/防塵/跌落/振動/懸
2023-07-01 10:01:29 1249
1249 
基于導納控制的機器人拖動示教是一種常用的機器人控制策略,它允許人與機器人直接互動,實現(xiàn)自然、直觀的控制。在導納控制中,機器人被建模為一個力控制系統(tǒng),其動力學特性由一個等效的導納(Admittance)模型描述。導納模型類似于彈簧和阻尼器的組合,用來描述機器人對外部力和運動的響應。
2023-12-04 09:48:338088 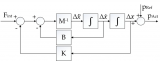
......另大量回收:回收ABB變頻器/ABB機器人示教器,回收發(fā)那科伺服/發(fā)那科機器人示教器,回收安川伺服/安川機器人示教器,回收易福門傳感器/接近開關,回收XIKE西克傳感器/西克光電開關,回收pilz皮爾
2021-07-14 09:24:27
3HAC031683-001 ABB機器人示教器電纜線銷售可維修,汕頭市羅克自動化科技有限公司歡迎您前來咨詢!聯(lián)系人郭經(jīng)理:*** 3HAC031683-001 ABB機器人示教器電纜線
2020-03-20 16:08:15
5400系列省時、省料的優(yōu)勢定能獲得您的青睞。IRB 5400將換色閥、漆料泵和流量傳感器和空氣/漆料調(diào)節(jié)器,集成到手臂上在同類噴涂機器人中是可靠性最強、經(jīng)濟效益最高的產(chǎn)品之一。ABB機器人IRB
2015-01-14 11:16:08
ABB機器人示教器控制器故障維修蘇州吉海機電設備有限公司機器人維修中心,ABB機器人示教器控制器故障維修 蘇州吉海是一家專業(yè)的自動化工控產(chǎn)品維修企業(yè),公司有充足的備件和優(yōu)良的維修工程師,可為客戶提供
2020-10-12 15:43:12
我的機器里面現(xiàn)在用的是stm的單片機,支持CAN與UART。但是ABB機器人的通訊協(xié)議是DEVICENET,這樣就需要一個總線轉換器anybus,對于編程以及成本來說比較高。我想問一下有什么單片機可以直接用devicenet通訊嗎
2017-10-27 12:16:58
ABB用的是DEVICENET,請問有什么單片機可以直接與ABB機器人通訊嗎?也就是說有什么單片機可以用DEVICENET嗎
2017-10-28 11:00:55
ABB機器人伺服電機維修常見故障是什么?
2021-09-29 06:48:18
;⑦機器人制動閘沒有正確打開。ABB機器人發(fā)生不一致路徑精確性故障維修方法:檢查機器人是否正確定義機器人工具及相應工作內(nèi)容;檢查機器人的旋轉計數(shù)器的位置是否正確;重新對機器人軸進行重新校準;根據(jù)發(fā)出噪音
2020-09-09 16:06:33
ZN-IRB01ABB機器人實訓平臺一、概述ZN-IRB01ABB機器人實訓平臺包含六自由度工業(yè)機器人、傳感器檢測系統(tǒng)、PLC控制系統(tǒng)及一套供料、輸送、壓鑄、焊接機構,可以實現(xiàn)對傳輸?shù)墓ぜM行碼垛
2021-07-01 08:57:20
的指定方向分量異常方便,p1.trans.z就可表示p1位置在z軸方向距離工件坐標系原點的距離。本文簡單介紹ABB機器人指令開發(fā)過程,其實也就是編寫附帶了參數(shù)的程序。在編程之前需要弄清幾個基本概念。任務
2019-10-21 16:36:02
全部按下按鈕時,系統(tǒng)變?yōu)殡姍C關(MOTORS OFF)模式。為了安全使用示教器,必須遵循以下原則使能設備按鈕(Enabling device)不能失去功能編程或調(diào)試的時候,當機器人不需要移動時,立即松開
2020-09-18 16:56:53
機器人示教器、ABB機器人主板、ABB機器人線纜、ABB機器人控制柜 潤滑油TMO15020L ABB機器人電池) ),|工業(yè)機器人維修保養(yǎng)(ABB示教器維修 減速機更換 電機更換 電機維修更換
2020-08-19 10:32:02
DSQC346G 3HAB8101-8/12E 機器人伺服驅動器ABB IRB6400機器人驅動模塊DSQC346G 3HAB8101-8.08FABB機器人伺服驅動器維修 DSQC
2020-10-10 16:02:03
ABB焊接機器人伺服電機維修常見故障有哪些?
2021-09-30 07:02:58
我的ABB機器人做焊接用。機器人給焊機的doweldon信號正常,也與機器人內(nèi)部的weldon信號映射過,但是在使用編程指令arcl /arclstart arclend等指令時不能工作,但是直接使用set doweldon是可以的。請問有誰知道是怎么回事嗎
2017-10-16 23:07:39
機器人的定義是什么?機器人優(yōu)點和缺點是什么?機器人是由哪些部分組成的?工業(yè)機器人的應用有哪些?
2021-07-05 06:48:21
1、機器人的控制系統(tǒng)“控制”的目的是使被控對象產(chǎn)生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質(zhì)”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
第二章 機器人系統(tǒng)與控制需求簡介2.1 工業(yè)機器人的系統(tǒng)組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(tǒng)(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
目前產(chǎn)業(yè)機器人僅能在嚴格定義的結構化環(huán)境中執(zhí)行預定指令動作,缺乏對環(huán)境的感知與應變能力,這極大地限制了機器人的應用。利用機器人的視覺控制,不需要預先對產(chǎn)業(yè)機器人的運動軌跡進行示教或離線編程,可節(jié)約
2015-01-23 15:02:27
KUKA庫卡C4機器人驅動器故障報警維修庫卡機器人維修內(nèi)容包括庫卡機器人示教器維修,KUKA伺服驅動模塊維修,庫卡機器人伺服電機維修,KUKA機械手PC工業(yè)電腦維修,庫卡機器人電路板維修,庫卡機器人
2021-09-17 07:09:52
得到了廣泛的應用,在我國有大量的需求,工業(yè)機器人系統(tǒng)包括:機器人示教器、控制器、機器人本體三部分組成。本課題所研究的是:基于可裁剪的WinCE6.0嵌入式操作系統(tǒng)的一種基于WinCE的工業(yè)機器人示教器
2015-07-23 22:14:55
全國區(qū)地區(qū)高價回收: (*** 同步V信) 全新/拆機不限,型號不限。收購的品牌型號有:大量回收:回收ABB變頻器/ABB機器人示教器,回收發(fā)那科伺服/發(fā)那科機器人示教器,回收安川伺服/安川機器人示
2021-08-18 14:31:15
。這種機器人還可以接受示教而完成各種簡單的重復動作,示教過程中,機械手可依次通過工作任務的各個位置,這些位置序列全部記錄在存儲器內(nèi),任務的執(zhí)行過程中,機器人的各個關節(jié)在伺服驅動下依次再現(xiàn)上述位置,故這種
2015-01-19 10:58:38
電話+微信:*** QQ:2785059036肖工哪里有回收發(fā)那科驅動器、數(shù)控系統(tǒng),回收發(fā)那科伺服電機高價求購西門子PLC回收示教器回收ABB機器人示教器回收kuka機器人示教器回收庫卡機器人示教器回收安川機器人示教器回收發(fā)那科機器人示教器回收ABB機器人示教器回收ABB機器人示教器
2021-06-03 11:54:42
,即可實現(xiàn)機器人與外部軸的協(xié)調(diào)運動。3 系統(tǒng)控制流程幾何尺寸和位置誤差以及焊接過程中工件受熱引起的變形都會導致實際焊縫位置偏離示教軌跡。為了保證焊接質(zhì)量的可靠性,系統(tǒng)采用接觸傳感器和電弧傳感器進行精確尋位
2018-03-13 09:15:48
大量回收全新發(fā)那科示教器,新舊不限。發(fā)那科示教器回收,F(xiàn)ANUC機器人示教器回收價格表,回收發(fā)那科示教器,F(xiàn)ANUC示教器回收,回收FANUC示教器,回收機器人示教器,回收abb示教器,回收莫特曼示
2020-05-12 13:26:06
示教器顯示50204動作監(jiān)控報警!有哪個對abb工業(yè)機器人熟悉的解答下
2019-04-18 00:50:07
工業(yè)機器人的控制系統(tǒng)的主要任務是控制工業(yè)機器人在工作空間中的運動位置、姿態(tài)和軌跡、操作順序及動作的時間等項目,主要功能有示教再現(xiàn)功能和運動控制功能。示教再現(xiàn)控制的主要內(nèi)容主要包括示教及記憶方式和示教
2017-10-20 10:03:57
現(xiàn)在廣泛應用的焊接機器人都屬于第一代工業(yè)機器人,它的基本工作原理是示教再現(xiàn)。示教也稱導引,即由用戶導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態(tài)、運動參數(shù)
2017-12-15 10:25:19
模塊化的控制系統(tǒng)體系結構:采用分布式CPU計算機結構,分為機器人控制器(RC),運動控制器(MC),光電隔離I/O控制板、傳感器處理板和編程示教盒等。機器人控制器(RC)和編程示教盒通過串口/CAN總線
2018-11-23 10:40:38
為什么ABB機器人電源模塊短路板會發(fā)生短路呢?怎樣去解決ABB機器人電源模塊短路板短路的問題?
2021-11-11 07:35:42
手機同步微信:185 5025 5583 昆山蘇州上海回收示教器ABB示教器庫卡示教器發(fā)那科示教器高價回收全新發(fā)那科機器人示教器回收發(fā)那科示教器出售現(xiàn)貨 回購回收ABB機器人示教器回收kuka機器人
2020-06-20 08:07:44
全國區(qū)地區(qū)高價回收: (*** 同步V信) 全新/拆機不限,型號不限。收購的品牌型號有:另大量回收:回收ABB變頻器/ABB機器人示教器,回收發(fā)那科伺服/發(fā)那科機器人示教器,回收安川伺服/安川機器人
2021-08-02 15:52:07
`-全國區(qū)地區(qū)高價回收: (*** 同步V信) 全新/拆機不限,型號不限。收購的品牌型號有:另大量回收:回收ABB變頻器/ABB機器人示教器,回收發(fā)那科伺服/發(fā)那科機器人示教器,回收安川伺服/安川
2021-07-30 14:00:32
就是想問下,機器人關機的時候,是不是要等到示教器出現(xiàn)到“connect……”畫面之后才可以斷電,還是在示教器上選擇了關機后,馬上就可以斷電?
2015-01-16 10:30:00
求助,,,當安川機器人運行過程中突然按下示教器上停止按鈕時然程序指針調(diào)到程序第一步(NOP步)執(zhí)行程序應該怎么編寫?
2017-12-02 01:32:49
焊接機器人的原理:焊接機器人是一種高度自動化的設備,焊接機器人的基本工作原理是示教再現(xiàn),即由用戶導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態(tài)、運動參數(shù)
2020-11-16 16:18:45
。 機器人維修,ABB機器人伺服電機維修的幾種故障,ABB機器人維修,ABB機器人驅動器維修,ABB示教器維修,機器人保養(yǎng)等,如自己無法維修解決,可以找蘇州吉海機電設備有限公司,本公司是一家第三方工業(yè)
2020-10-27 11:12:09
萌新求助,求ABB機器人驅動模塊溫度警告及保養(yǎng)方案
2021-11-12 07:05:25
想用Labview做機器視覺,怎樣將Labview通過視覺算出的工件的偏移量以及偏移角度的值通過Profinet網(wǎng)絡賦于ABB機器人里的變量(變量類型:num)?
2016-10-31 13:15:38
stm32直接can總線連接devicenet與abb機器人通訊可行嗎,需要另外加隔離或升壓設備嗎?請老哥們不吝賜教!
2019-02-13 19:58:08
變得更加普遍,同時,它們所具有的功能也會越來越多。機器人示教器是機器人控制系統(tǒng)中的重要組成部分,主要實現(xiàn)用戶與機器人控制器,用戶與機器人本體之間的通信。機器人控制器接收到示教器的運動指令后經(jīng)過譯碼、邏輯
2017-03-16 14:42:26
、程序編輯步驟、手動調(diào)試技巧以及示教器常用操作等核心內(nèi)容,同時針對實際使用中常用的指令進行詳細的講解。通過學習本書,使讀者能夠熟練掌握ABB工業(yè)機器人的基本操作,對其知識體系具有全面的認識。5、工業(yè)
2018-10-29 17:03:22
青島ABB工業(yè)機器人無法正常進入系統(tǒng)故障維修原因:導致ABB機器人出現(xiàn)此類無法正常進入系統(tǒng)故障,可能有以下幾個原因:①控制器的SD卡故障;②主計算機模塊內(nèi)的通訊基板DSQC1006板出現(xiàn)故障;③主計
2020-07-16 14:10:14
通過介紹目前噴涂機器人的研究現(xiàn)狀,引出在工業(yè)級計算機IPC 與運動控制卡的平臺上研制六自由度噴涂機器人的可行性。在參考其它工業(yè)機器人的示教檢查的基礎上,本文提出符
2009-12-19 15:27:51 18
18 TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
深圳泰科智能TA6系列協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
ABB機器人廣泛應用于各個行業(yè),如汽車工業(yè)、電子工業(yè)、半導體行業(yè)、制藥行業(yè)、食品飲料行業(yè)、紡織行業(yè)、化工行業(yè)等等。它所帶來的高效、高質(zhì)量和大規(guī)模生產(chǎn)能力已經(jīng)成為眾多企業(yè)追逐的目標。
2024-08-08 15:53:14
產(chǎn)品介紹?ABB 3E032287 ME503.3 CABLE UNIT BASE是一種用于ABB機器人的電纜單元基座,主要用于連接和控制機器人的各種組件和功能。?ABB 3E032287
2024-09-30 17:36:20
產(chǎn)品介紹 ABB機器人產(chǎn)品線豐富,包括?多關節(jié)機器人、?協(xié)作機器人、?噴涂機器人、?SCARA機器人以及?自主移動機器人(?AMR)等?多關節(jié)機器人?:ABB的多關節(jié)機器人是六軸關節(jié)型
2024-09-30 17:56:07
產(chǎn)品介紹 ?ABB3HAC024058-001是一款ABB機器人控制器,屬于IRC5控制器系列。?ABB3HAC024058-001的技術參數(shù)包括:產(chǎn)品凈重為1.8公斤,凈深520毫米
2024-10-08 15:53:24
產(chǎn)品介紹 ?ABB 3HAC022545-00機器人的線纜?ABB線纜是一種用于傳輸電力和控制信號的電纜,廣泛應用于工業(yè)機器人、自動化系統(tǒng)等領域。?通常由多股細銅線編織而成,內(nèi)部結構包括
2024-10-11 17:16:22
產(chǎn)品介紹 ABB3HNA001635-001機器人的軸承空氣套件軸承空氣套件在ABB機器人中起到重要作用。它能夠確保機器人在運行過程中的穩(wěn)定性和耐用性,減少摩擦和磨損,延長機器人的使用壽命
2024-10-11 17:22:32
產(chǎn)品介紹 ABB3HEA800535-001是一款用于ABB機器人的伺服電機ABB機器人的關鍵技術包括:?運動控制技術?:通過控制機器人的關節(jié)角度和速度,實現(xiàn)復雜的運動軌跡,確保高精度
2024-10-11 17:25:46
泰克機器人示教仿真軟件視頻(孫斌,段晉軍)
2013-09-17 10:02:0274 介紹ABB機器人示教操作的指導書,中文版,很適合初學者!
2016-08-19 15:57:390 碼垛機器人示教器的設計與實現(xiàn)_朱琳
2017-01-18 20:24:573 系統(tǒng)中。 這就對現(xiàn)階段的機器人技術提出了要求,其中,示教技術就是重要的一項。機器人示教技術指的是通過編程指揮機器人去完成某一具體任務。編程的過程即為示教過程。 ABB機器人示教器(FlexPendant)由硬件和軟件組成,其本
2017-09-29 16:59:088 滿足日益增長的復雜性要求,機器人不僅要能長期穩(wěn)定地完成重復工作,還要具備智能化、網(wǎng)絡化、開放性、人機友好性的特點。作為工業(yè)機器人繼續(xù)發(fā)展與創(chuàng)新的一個重要方面,示教技術正在向利于快速示教編程和增強人機協(xié)作能力的方向發(fā)展。 工
2017-10-09 16:03:051 S4系統(tǒng)機器人:每臺機器人均配有一張IRB盤、三張系統(tǒng)盤和若千張參數(shù)盤,其中IRB盤為每臺機器人特有,其他盤片只要版本相同可以通用。根據(jù)機器人工作性質(zhì),每臺機器人可以另外增加應用軟件選項盤。
2017-10-17 16:27:0215 本書從認識到熟練掌握工業(yè)機器人,并根據(jù)實際應用進行基本作業(yè)示教這一主題,以工業(yè)機器人四巨頭ABB、KUKA、FANUC和YASKAWA為主要對象,通過典型案例對工業(yè)機器人示教和操作的相關基礎共性
2017-12-21 17:52:027074 ABB IRB4600機器人的運動學特性,進行了其正逆運動學的求解。參照真實示教器,進行了虛擬示教器的開發(fā):利用正則表達式設計了RAPID語言解釋器,對機器人的運動軌跡進行了規(guī)劃,用于運動指令的解析。以真實機器人車間為例,進行了虛擬示教場景的搭
2018-02-26 10:19:372 工業(yè)機器人示教編程和離線編程,有何區(qū)別?
2018-03-05 15:59:5221207 一、如何配置ABB機器人Profinet從站
1、機器人需要有888-2或者888-3選項(使用控制器網(wǎng)口),或者840-3選項(使用Anybus網(wǎng)口)
2018-05-11 15:27:5964250 
一般來說,操作FANUC機器人時,需要使用FANUC示教器iPendant來對機器人進行示教、做信號配置等。對于熟練使用示教器的用戶來說,示教器就是他們控制機器人的工具。沒有示教器,還能控制機器人嗎?答案是肯定的。
2018-05-30 16:09:2512115 
ABB工業(yè)機器人常見故障處理
1. 開機示教器顯示如下
1) 如果機器人開機,示教器一直顯示connecting to the robot controller,如上圖(robotware版本是白色界面,提示關鍵字一樣),如何處理?
2018-07-06 11:55:5133218 示教器是進行機器人的手動操縱、程序編寫、參數(shù)配置以及監(jiān)控用的手持裝置。
2018-08-10 09:42:2969379 作為并聯(lián)機器人繼續(xù)發(fā)展與創(chuàng)新的一個重要方面,拖動示教的應用將為并聯(lián)機器人調(diào)試技術趨向快速、簡便的方向發(fā)展。秉承不斷創(chuàng)新突破自我的勃肯特,在11月正式通過拖動示教在并聯(lián)機器人上的內(nèi)部測試,實現(xiàn)該項技術在并聯(lián)機器人應用的零突破。
2018-12-07 17:14:081705 本文檔的主要內(nèi)容詳細介紹的是機器人Rt800示教器的操作用戶手冊資料免費下載。
2018-12-17 08:00:004 ABB機器人提供CC-Link總線的支持。ABB機器人通過DSQC 378B(如下圖)模塊,把CC-Link協(xié)議轉化成Devicenet協(xié)議,與機器人控制器通訊。
2020-03-24 08:00:008 本文檔的主要內(nèi)容詳細介紹的是發(fā)那科機器人示教手冊DeviceNet配置流程詳細說明。
2020-05-26 08:00:0019 示教盒示教和導引式示教兩種途徑實現(xiàn)。由于示教方式實用性強,操作簡便,因此大部分機器人都采用這種方式。離線編程方法是利用計算機圖形學成果,借助圖形處理工具建立幾何模型,通過一些規(guī)劃算法來獲取作業(yè)規(guī)劃軌跡。與示教編程不同,離線編程不與機器人發(fā)生關系,在編程過程中機器人可以照常工作。
2020-07-23 11:42:4845501 隨著科技的進步,越來越多企業(yè)都轉型往智能制造行業(yè)方向發(fā)展了,這也是工業(yè)機器人為什么會快速普及的原因了,就拿拖動示教噴涂機器人來說,它具有免編程噴涂、噴涂質(zhì)量高、效率高以及回報率高等優(yōu)勢特點,幫助企業(yè)
2020-08-11 09:52:032050 技能或 RAPID代碼知識即可將機器人自動化引入生產(chǎn)線。 ? 借助Wizard 簡易編程,機器人可在幾分鐘內(nèi)啟動運行。編程過程更加簡化,用戶只需在ABB 示教器上拖放所需的功能模塊,就能立即看到結果并調(diào)整機器人的動作。將這些模塊連接在一起,還可以為機加工、裝配
2021-01-18 10:04:292708 達到機器人與PLC的信號交互。 2.通訊速率設置: 機器人與PLC的通訊速率設置成一樣? ? ? ? 3.機器人輸入輸出字節(jié)大小配置: ABB控制器DN_Internal_Device從站模塊供使用 機器
2021-01-18 10:53:1810925 基于深度學習的機器人示教系統(tǒng)設計與實現(xiàn)
2021-06-30 15:53:3780 青島ABB機器人發(fā)生電源故障維修工具:檢查ABB機器人DSQC604故障指示燈LED已經(jīng)亮起時,則表示ABB機器人電源出現(xiàn)了故障,對其檢測維修時需要的的工具有歐姆計、伏特計及阻抗型負載。首先檢查
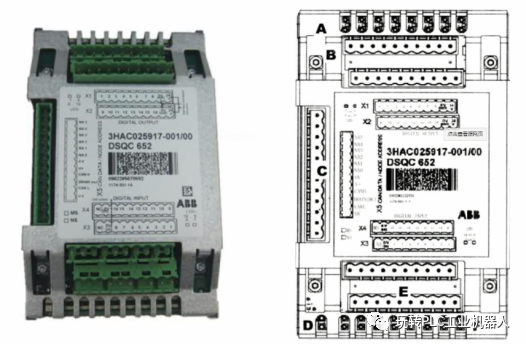
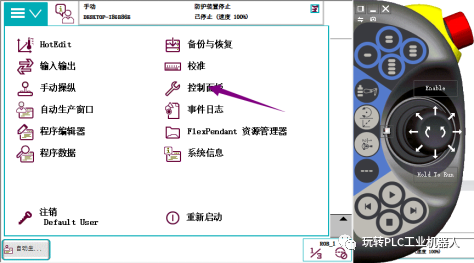
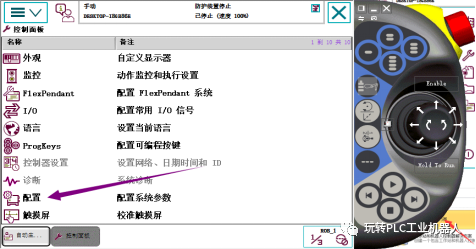
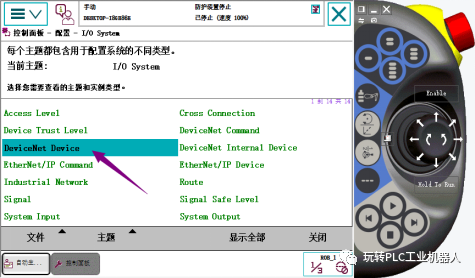
2022-01-11 13:32:0612 了解DSQC652輸入輸出模塊結構和接口連接說明;掌握在RobotStudio的虛擬示教器中進行I/O配置方法;掌握在RobotStudio的I/0系統(tǒng)中進行I/0配置方法。
2022-08-24 09:33:389 一臺ABB機器人應用于火焰噴涂表面處理領域,如圖1所示。設備開機后機器人示教器上顯示“SMB串口測量板后備電池已丟失,機器人轉數(shù)計數(shù)器數(shù)據(jù)丟失”,機器人無法執(zhí)行動作,報警信息如圖2所示。
2022-11-15 11:30:385297 焊接機器人示教器的作用有哪些?主要用于設置焊接參數(shù)、焊接路徑、遠程監(jiān)測示教減少傷害事故。
2023-02-12 09:27:444668 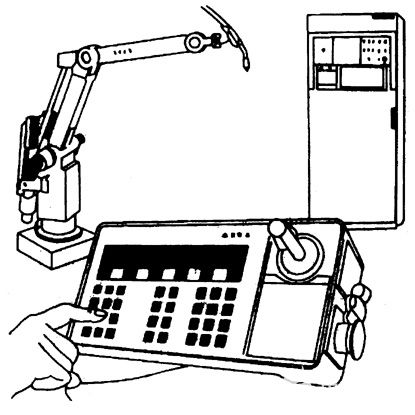
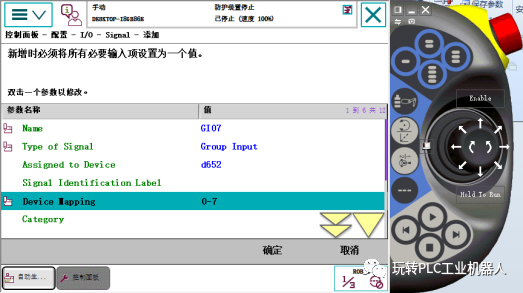
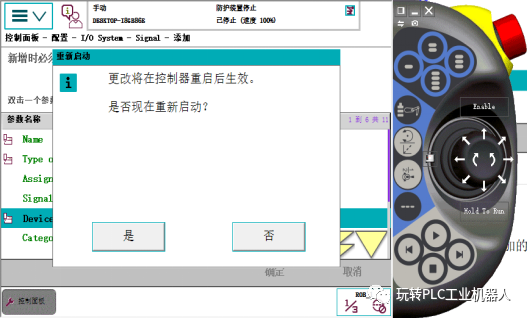
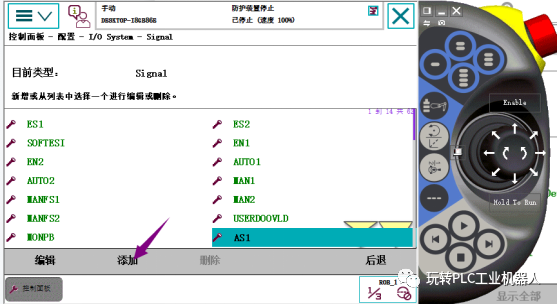
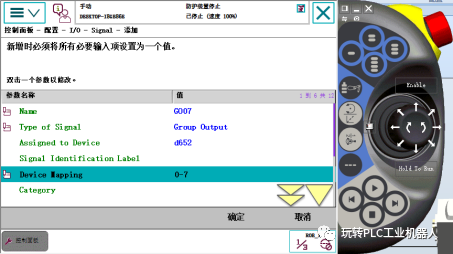
本篇文章就是給大家示范配置一個DSQC652的信號板,這是一個常見的機器人信號板。
2023-05-11 09:52:083266 
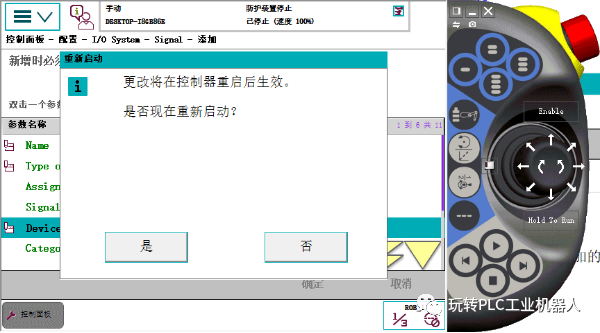
很多學員在學習和使用機器人的過程中,會遇到提示需要更新轉數(shù)計數(shù)器的情況.
2023-06-07 09:06:1410658 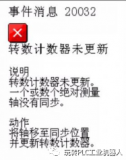
ABB機器人是一種在工業(yè)自動化中廣泛使用的機器人,具有高效率、高精度、高可靠性等優(yōu)點,已經(jīng)成為現(xiàn)代制造業(yè)的重要裝備之一。
2023-06-11 10:56:464324 
工業(yè)機器人系統(tǒng)主要由機器人(機械手)本體、機器人控制器、示教器等組成。那么,示教器是什么?示教器簡稱TP,它是用戶與機器人之間相互交流的重要裝置。用戶可以通過操作示教器來查看機器人當前位置、寄存器
2022-09-08 17:21:172362 
隨著機器人技術的發(fā)展,推動了機器人在社會生產(chǎn)的應用。但機器人的應用存在開發(fā)難、安全性差等問題。示教器擁有的豐富的組件可輕松解決機器人開發(fā)難的問題,且自帶的監(jiān)控功能可提供安全的使用保障。“示教器
2023-03-06 13:52:136881 隨著機器人技術的發(fā)展,推動了機器人在社會生產(chǎn)的應用。但機器人的應用存在開發(fā)難、安全性差等問題。示教器擁有的豐富的組件可輕松解決機器人開發(fā)難的問題,且自帶的監(jiān)控功能可提供安全的使用保障。 ?? “示教
2023-07-14 11:45:054791 
焊接機器人是現(xiàn)代制造業(yè)中廣泛使用的自動化設備,它可以高效、精確地進行焊接工作,提高生產(chǎn)效率和焊接質(zhì)量。然而,為了讓機器人能夠執(zhí)行任務,需要進行示教操作,將所需的動作和路徑錄入機器人的控制系統(tǒng)。本文將
2023-08-02 17:56:532241 
ABB機器人I/O板信號設定(dsqc651為例)!
2023-08-12 14:30:334827 
朗宇芯HT機器人示教器系列,是專用于工業(yè)機器人、注塑、桁架機床、數(shù)控系統(tǒng)等行業(yè)的移動式人機交互終端,它集顯示、觸摸、功能按鍵于一體,滿足不同工藝應用場景下的人機交互需求。產(chǎn)品定位:幫助機器人企業(yè)提升
2023-08-24 15:08:29991 
?? ? ?示教器通常也叫示教編程器或示教盒,是進行機器人的手動操縱、程序編寫、參數(shù)配置以及監(jiān)控用的手持裝置;是機器人控制系統(tǒng)的核心部件,是一個用來注冊和存儲機械運動或處理記憶的設備,該設備是由
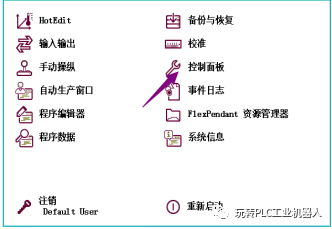
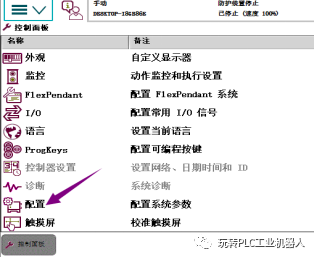
2024-03-23 08:42:231996 ABB機器人是一種廣泛應用于工業(yè)自動化領域的智能設備。它具有高度的靈活性、可靠性和精確性,可以完成各種復雜的任務。為了實現(xiàn)這些功能,ABB機器人需要進行基本配置。以下是ABB機器人的基本配置的詳細
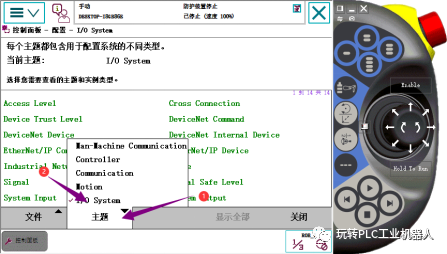
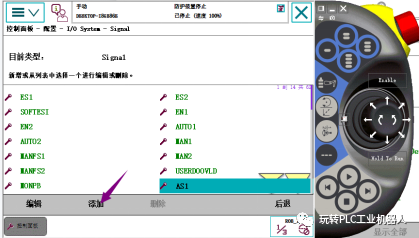
2024-06-17 09:19:023308 引言 ABB機器人作為工業(yè)自動化領域的重要設備,其IO通信和信號設置是實現(xiàn)機器人與外部設備進行數(shù)據(jù)交換和控制的關鍵。本文將詳細介紹ABB機器人的IO通信和信號設置過程,包括硬件連接、軟件配置、信號
2024-06-17 09:22:206119 工業(yè)機器人示教器是一個關鍵的人機交互設備,通過它操作者可以操作工業(yè)機器人運動、完成示教編程、實現(xiàn)對系統(tǒng)的設定、故障診斷等。以下是工業(yè)機器人示教器上常見按鈕的功能介紹: 一、緊急停止與安全相關按鈕
2024-09-04 09:44:4410000 在現(xiàn)代制造業(yè)中,焊接機器人廣泛應用于提高生產(chǎn)效率和焊接質(zhì)量。而焊接機器人示教模式的正確設置,是確保自動化焊接過程精確執(zhí)行的重要環(huán)節(jié)。今天創(chuàng)想智控焊縫跟蹤系統(tǒng)小編帶大家了解焊接機器人示教模式怎么設置
2024-09-09 17:55:351451 
隨著拖動示教在協(xié)作機器人、并聯(lián)機器人上的應用,將調(diào)試技術趨向快速、簡便的方向發(fā)展,滿足生產(chǎn)企業(yè)應用機器人進行及時、高效的生產(chǎn)需求,以及在工業(yè)4.0和“中國制造 2025”的背景下,適應現(xiàn)代工業(yè)快速
2024-10-23 15:52:162676 
。DMC600M拖動示教控制系統(tǒng)? ? ??拖動示教通常使用以下步驟:? ? ??示教模式切換:將機器人切換到示教模式,使其能夠記錄操作員的動作。? ? ??手動示教:操作員通過手動移動機器人的末端執(zhí)行器,來
2024-10-23 15:52:161472 松下機器人示教編程教學課件(新)
2025-06-11 17:23:330 本案例是模擬ModbusTCP主站軟件通過開疆智能ModbusTCP轉Devicenet網(wǎng)關連接ABB機器人的配置案例,具體過程如下。 配置過程 ABB機器人IO板配置 1、簡介 (ABB老版本IO
2025-06-12 17:44:07945 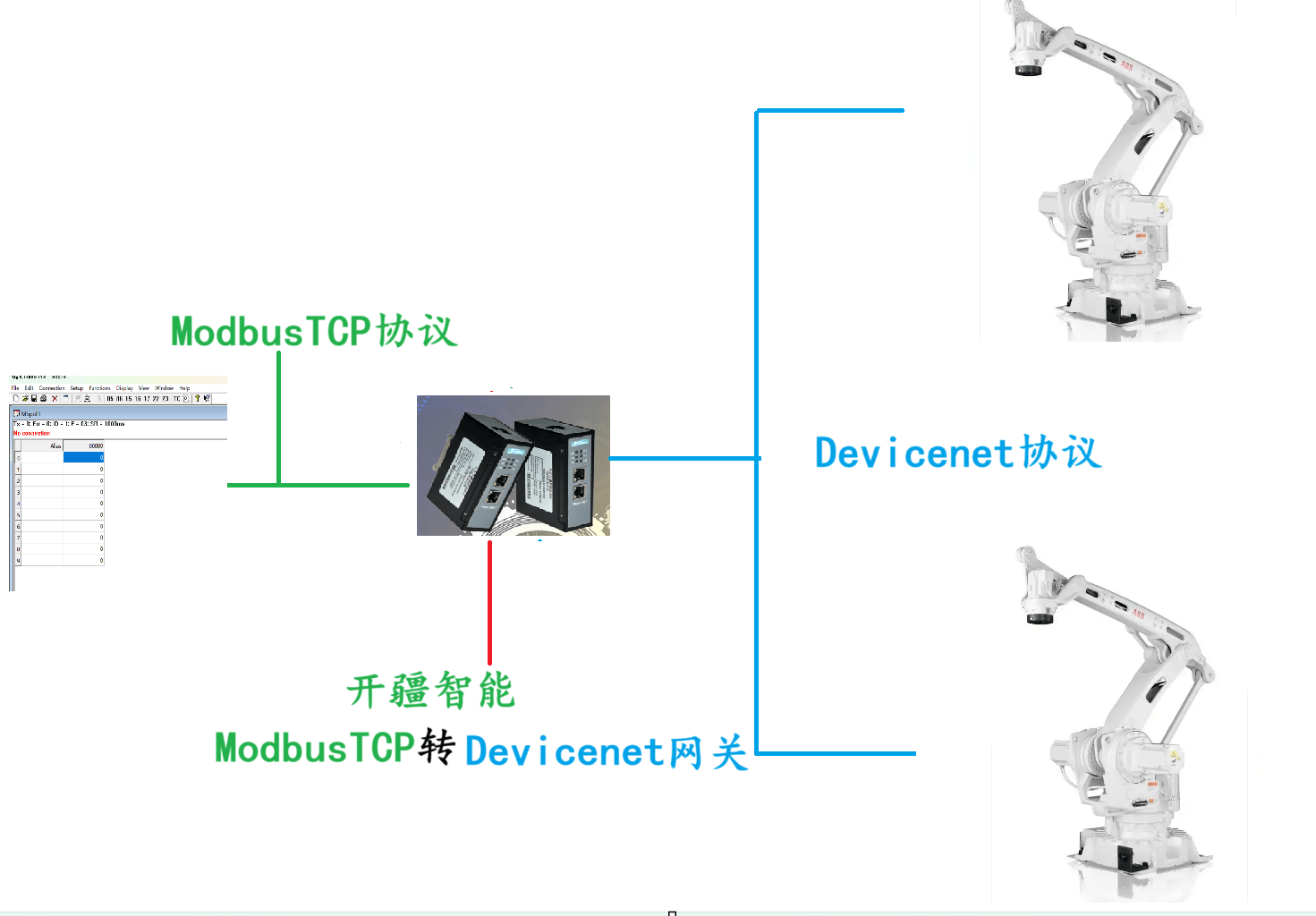
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論