 工業機器人常見問故障分析與處理
工業機器人常見問故障分析與處理

對機器人設備在使用過程中出現的如零點丟失、安全報警等常見問題及解決過程進行闡述說明。
1序言
工業機器人近年來發展迅速,因其重復精度高、可靠性好等優點,已經在汽車、電子及物流等多個領域得到廣泛應用[1],常見的機器人品牌有KUKA、ABB、FANUC、Yaskawa、SIASUN、埃斯頓和匯川等。隨著機器人應用的拓展與深入,工業機器人開始進行各類復雜系統集成,應用領域越發寬廣,如澆筑、鉆孔、鉆鉚及磨削等。機器人集成的柔性自動化系統在航空航天領域也開始應用,可逐漸實現無人化與智能化,提高生產效率。
2ABB機器人零點丟失故障
一臺ABB機器人應用于火焰噴涂表面處理領域,如圖1所示。設備開機后機器人示教器上顯示“SMB串口測量板后備電池已丟失,機器人轉數計數器數據丟失”,機器人無法執行動作,報警信息如圖2所示。

圖1 ABB機器人
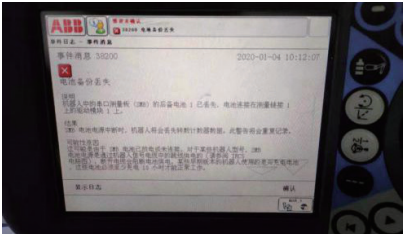
圖2 機器人示教器報警
2.1 故障原因分析
ABB機器人使用的編碼器為單圈絕對值編碼器,即編碼器能實時反饋電動機在一圈內的位置信息,單圈內的位置信息不需要額外供電存儲。由于減速機/齒輪箱的存在,機器人的某個軸旋轉180°時電動機已經旋轉了幾十圈,電動機旋轉超過一圈,編碼器發出的位置又從零開始,故對于單圈絕對值編碼器,還需要一個設備對電動機旋轉圈數進行計數。
SMB板具有兩個作用,一是模數轉化,將編碼器(Resolver)傳過來的模擬量信號轉化為數字信號;二是對電動機圈數進行計數[2]。而電動機圈數在SMB板中存儲需要電源,在機器人控制柜開啟時,由控制柜給SMB板供電;在關閉控制柜時,則由SMB板上的電池進行供電。
分析故障原因,可能由于電源不穩定或其他原因,會導致電動機旋轉的圈數丟失。拆卸機器人本體下方SMB板上的電池,進行測量后確認故障原因是因電池電量不足而導致轉數計數器數據丟失。
由于機器人電動機單圈編碼器反饋的存儲不需要電池,即機器人電動機單圈參考位置正確,故在人工移動機器人各軸到刻度位后的“轉數計數器更新”不會影響機器人的精度。
2.2 故障處理
1)首先更換SMB板上的電池,完成后進行各軸零位校準工作。
2)以單軸運動模式手動移動機器人的各關節至零位刻度線,此時一定要以機器人本體的刻度線為準,示教器顯示的數據可能已經混亂。在現場如果不能使所有軸同時移動到刻度位,則可根據實際情況先移動某一單軸。
3)進行示教器→校準→轉數計數器→更新轉數計數器操作,完成單軸零位校準。
4)依次完成A1~A6軸零位校準。
3KUKA機器人碰撞零點丟失故障
一臺倒掛式KUKA機器人用于在自動化產線上進行零件上下料工作,如圖3所示。在初期調試過程中因A1軸軟限位參數設置不當而導致機器人在運動過程中發生了碰撞,A4軸電動機損壞,傳動桿彎曲,如圖4所示。

圖3 KUKA機器人

圖4A4軸電動機損壞和傳動桿彎曲
KUKA機器人各軸伺服電動機使用的編碼器為旋轉變壓器,編碼器信號連接至機器人本體下方的RDC,RDC將編碼器的模擬量信號轉換成數字量信號傳輸至控制系統,由控制系統識別并記錄機器人各軸當前位置。
(1)單軸零點校準 針對碰撞故障,取下A4軸電動機及連接桿進行更換。完成A4軸電動機及連桿更換后,A4、A5、A6軸零點位置數據丟失,需要重新校準,此時可使用KUKA專用的零點校準儀器EMD對機器人A4、A5、A6軸機械零點進行校準[3]。單軸零位校準步驟如下。
1)通過示教器手動操作機器人該軸移動至預零點標定位置,如圖5所示。
2)操作示教器點擊主菜單選擇投入運行→零點標定→EMD→帶負載校正→首次零點標定。
3)從窗口中選定的軸上取下測量筒的防護蓋,將EMD擰到測量筒上,如圖6所示。
4)將測量導線一端連接到EMD,另一端連接到KUKA機器人接線盒的X32接口上。
5)在示教器上選擇需要校準的軸,點擊零點標定,起動運行機器人,此時機器人開始運動,如果EM通過了測量切口的最低點,則已達到零點位置,機器人會自動停止,數值被控制系統儲存,單軸零點校準完成。
圖5 預零點標定位置

圖6 安裝EMD
(2)軟限位參數修改 依次完成A4~A6軸零點校準工作。各軸校準后,對機器A1軸軟限位參數進行修改,具體操作步驟如下。
1)進入專家模式。
2)點擊示教器主菜單→投入運行→售后服務→軟件限位開關→修改軟限位,如圖7所示。也可以進入文件R1-Mada-Machine,在文本中進行修改。
3)根據現場應用情況,將原來的A 1軸軟限位參數±185°修改至±40°(見圖8),避免再次出現碰撞情況。
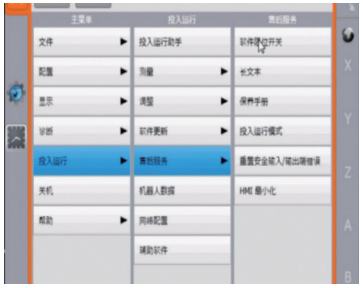
圖7 修改軟限位界面

圖8 軸軟限位參數修改
4KUKA機器人安全報警故障
一臺KUKA機器人因長期未使用,開機后示教器出現初始化錯誤及安全模塊故障報警,如圖9所示。
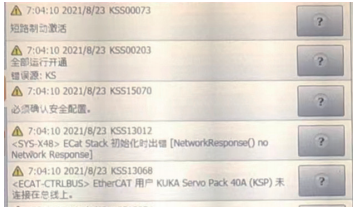
圖9 初始化錯誤報警
針對故障,采取如下處理方法。
1)由于提示的是安全類報警,所以初步懷疑與外部安全信號異常有關。此時可以通過進入“投入運行”模式,判斷機器人外部安全線路是否存在問題。在投入運行模式下KUKA機器人可以在不連接外部回路或開關的情況下移動機器人。
2)通過在示教器主菜單中選擇投入運行→售后服務→投入運行模式,進入“投入運行”模式后機器人報警依然存在,確定故障來源于機器人自身控制系統,與外部安全回路無關。
3)通過報警提示,查找在CCU板(見圖10)上的SYS-X48接口。觀察CCU板狀態燈發現異常,判斷CCU板損壞,更換CCU板備件后機器人設備恢復正常使用。
圖10 KUKA C4控制柜CCU板
5結束語
目前來說,機器人在投入正常運行后故障率較低,但作為維護人員仍需要做好機器人的周期保養工作,按照機器人維保要求定期更換齒輪箱油液、蓄電池,檢測帶張緊力,以及定期進行系統備份等工作,以保證機器人良好的運行狀態。
審核編輯 :李倩
-
計數器
+關注
關注
32文章
2316瀏覽量
98188 -
智能化
+關注
關注
15文章
5236瀏覽量
60164 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98189
原文標題:實用!工業機器人常見問故障分析與處理
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
工業機器人TOP1,切入人形機器人賽道,意欲何為?

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
基于工業路由器的工業機器人遠程監控系統方案
工業一體機在工業服務機器人配套中的應用

工業通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
工業機器人與協作機器人概念不同

明遠智睿SSD2351開發板:語音機器人領域的變革力量
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用




 工商網監
工商網監
評論