") ABB機器人DeviceNet通訊總線的兩個可選項
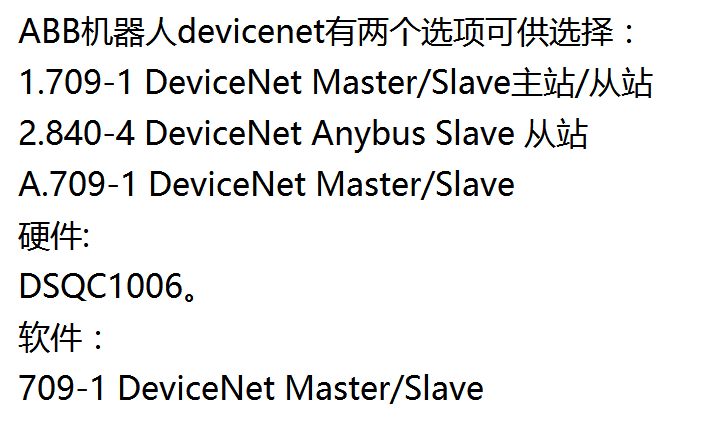
ABB機器人DeviceNet通訊總線的兩個可選項

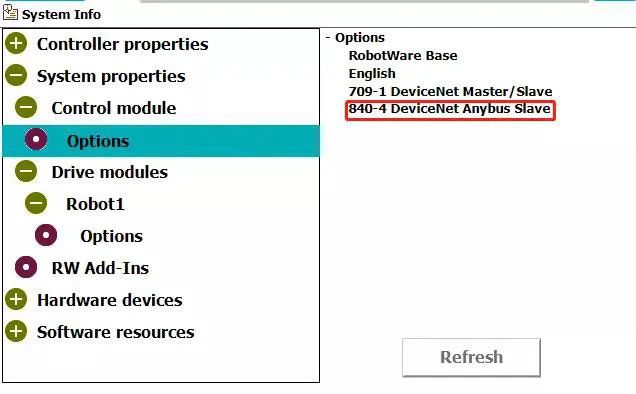
B.840-4DeviceNet Anybus Slave(比較少用)
硬件:
DSQC1003+DSQC1004。
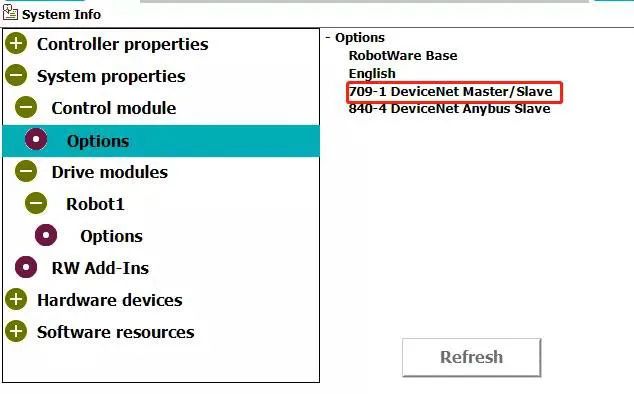
軟件:
840-4DeviceNet Anybus Slave
DeviceNet管腳定義

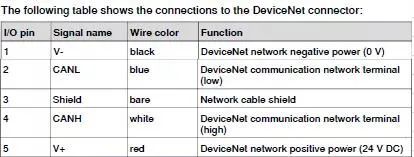
備注:ABB機器人的1#管腳和5#管腳已經(jīng)接了24V電源
機器人為什么要使用現(xiàn)場總線和外圍設備通訊呢?
當機器人與PLC通訊需要很多信號(成百上千)的時候,這個時候用現(xiàn)場總線通訊方式來達到機器人與PLC的信號交互。
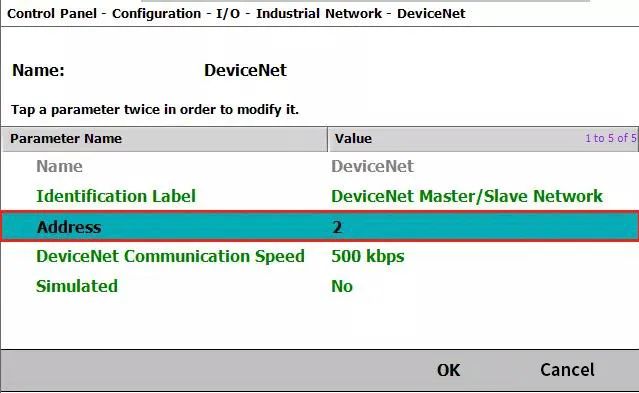
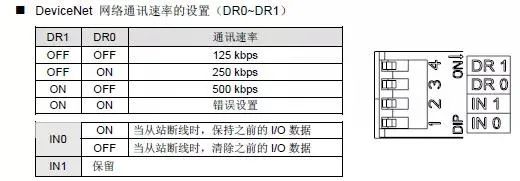
2.通訊速率設置:
機器人與PLC的通訊速率設置成一樣
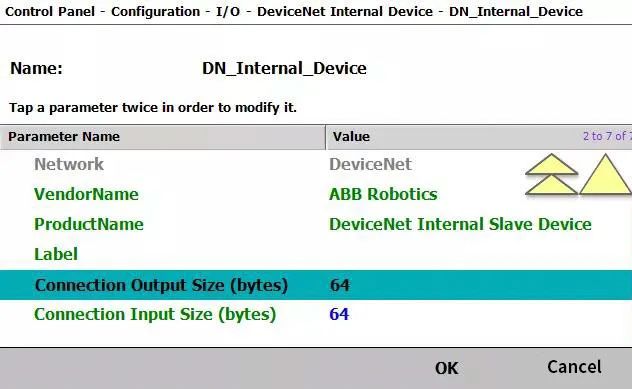
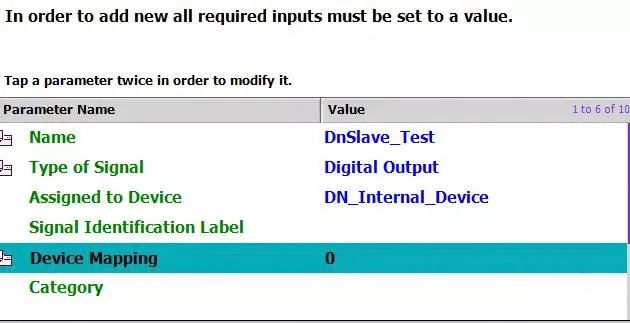
3.機器人輸入輸出字節(jié)大小配置:
ABB控制器DN_Internal_Device從站模塊供使用
機器人從站輸入輸出字節(jié)數(shù)保證與PLC主站模塊一致
4.機器人新建信號與PLC通信:
機器人的輸入對應PLC的輸出
機器人的輸出對應PLC的輸入
PLC的DeviceNet設置如下:
1.DVPDNET-SL設置站號

2.DVPDNET-SL設置通訊速率
3.將DVPDNET-SL設置成主站
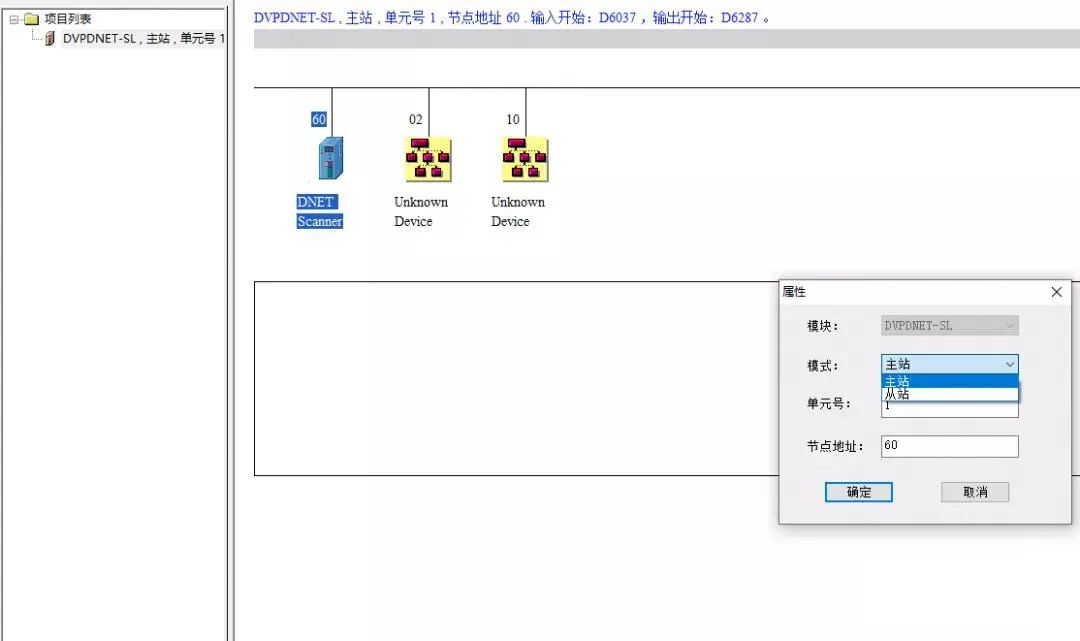
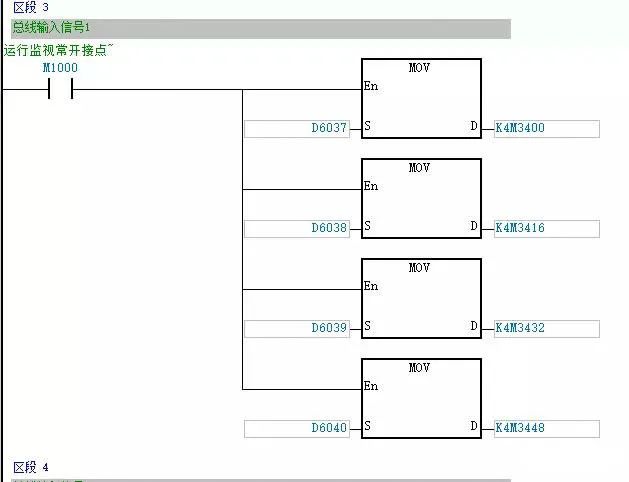
4.DVPDNET-SL分配輸入輸出字節(jié)

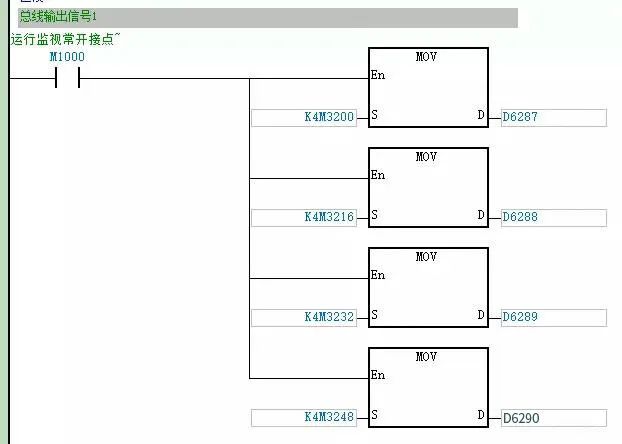
相應的D數(shù)據(jù)存儲器就可以在PLC程序使用
一般習慣將D轉(zhuǎn)換成M來使用
ABB機器人與外圍設備之通訊篇
基于ABB控制器自帶網(wǎng)口的通訊方式
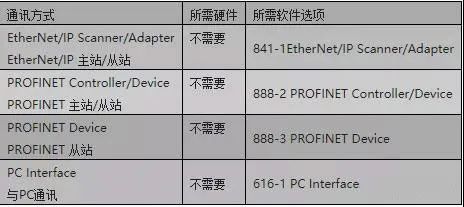
基于擴展板+Anybus適配器

基于PCIe插槽

針對外圍設備,各家產(chǎn)品支持的通訊方式不盡相同,以下列出常用PLC所支持的通訊方式
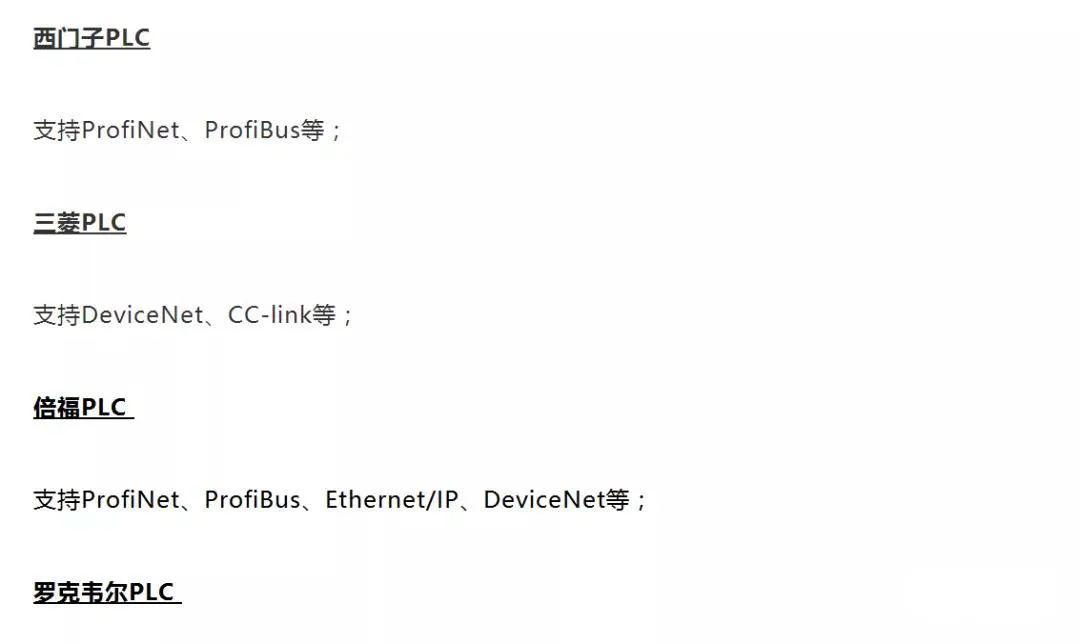
支持Ethernet/IP、DeviceNet等;歐姆龍PLC支持DeviceNet、Ethernet/IP(NJ/NX系列)等;基恩士PLC支持Ethernet/IP等;松下PLC支持Ethernet/IP等
與上位機與上位機通訊可使用PC Interface選項或者RS232進行通訊
常見于視覺系統(tǒng)與機器人通訊或者上位機控制機器人
責任編輯:xj
原文標題:ABB機器人DeviceNet通訊總線&《外圍設備通訊》
文章出處:【微信公眾號:PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222266 -
通訊
+關(guān)注
關(guān)注
9文章
946瀏覽量
36539 -
總線
+關(guān)注
關(guān)注
10文章
3040瀏覽量
91660 -
ABB
+關(guān)注
關(guān)注
26文章
572瀏覽量
56722
原文標題:ABB機器人DeviceNet通訊總線&《外圍設備通訊》
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術(shù)圈】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
疆鴻智能EtherCAT轉(zhuǎn)DeviceNet,發(fā)那科機器人融入倍福的“焊接紅娘”

突發(fā)!ABB機器人業(yè)務易主,軟銀53.75億美元接盤
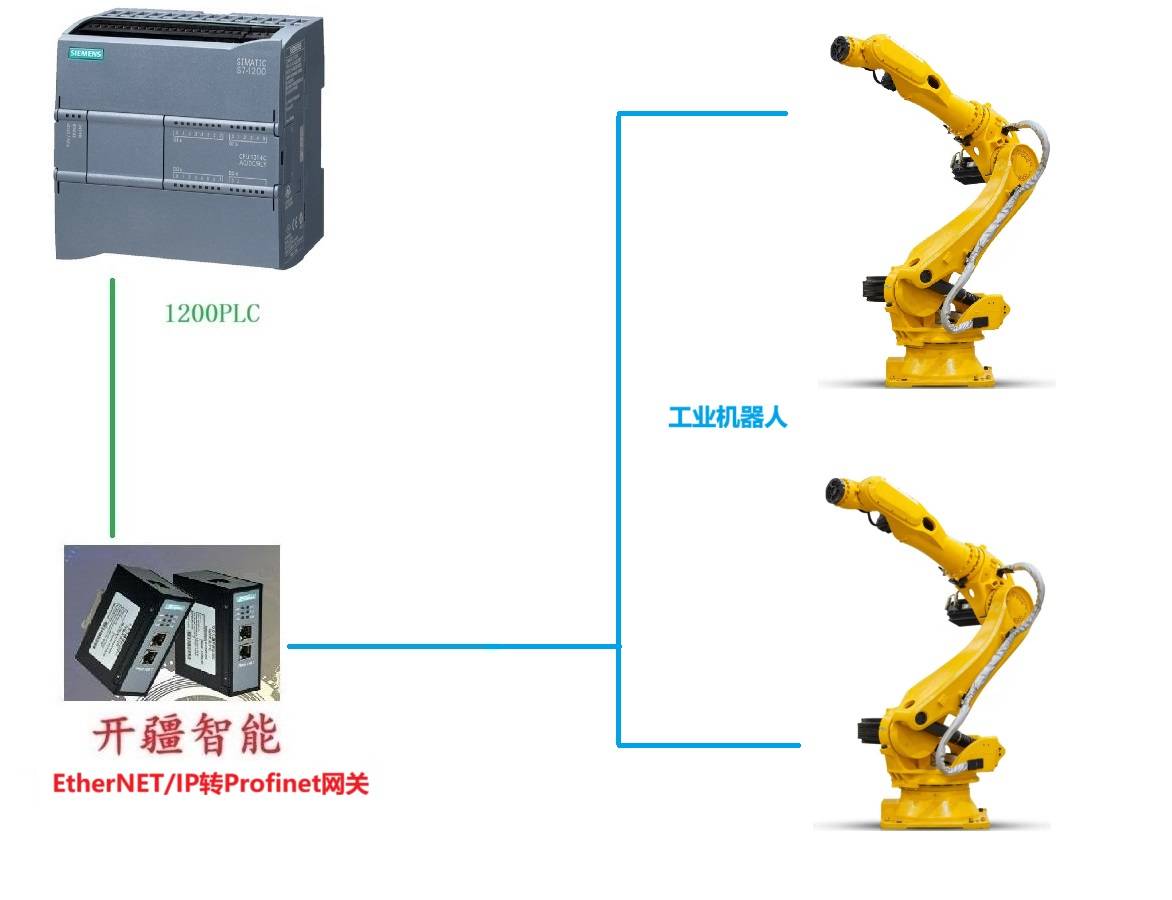
開疆智能Profinet轉(zhuǎn)EtherNET/IP網(wǎng)關(guān)連接機器人配置案例
工業(yè)機器人的特點
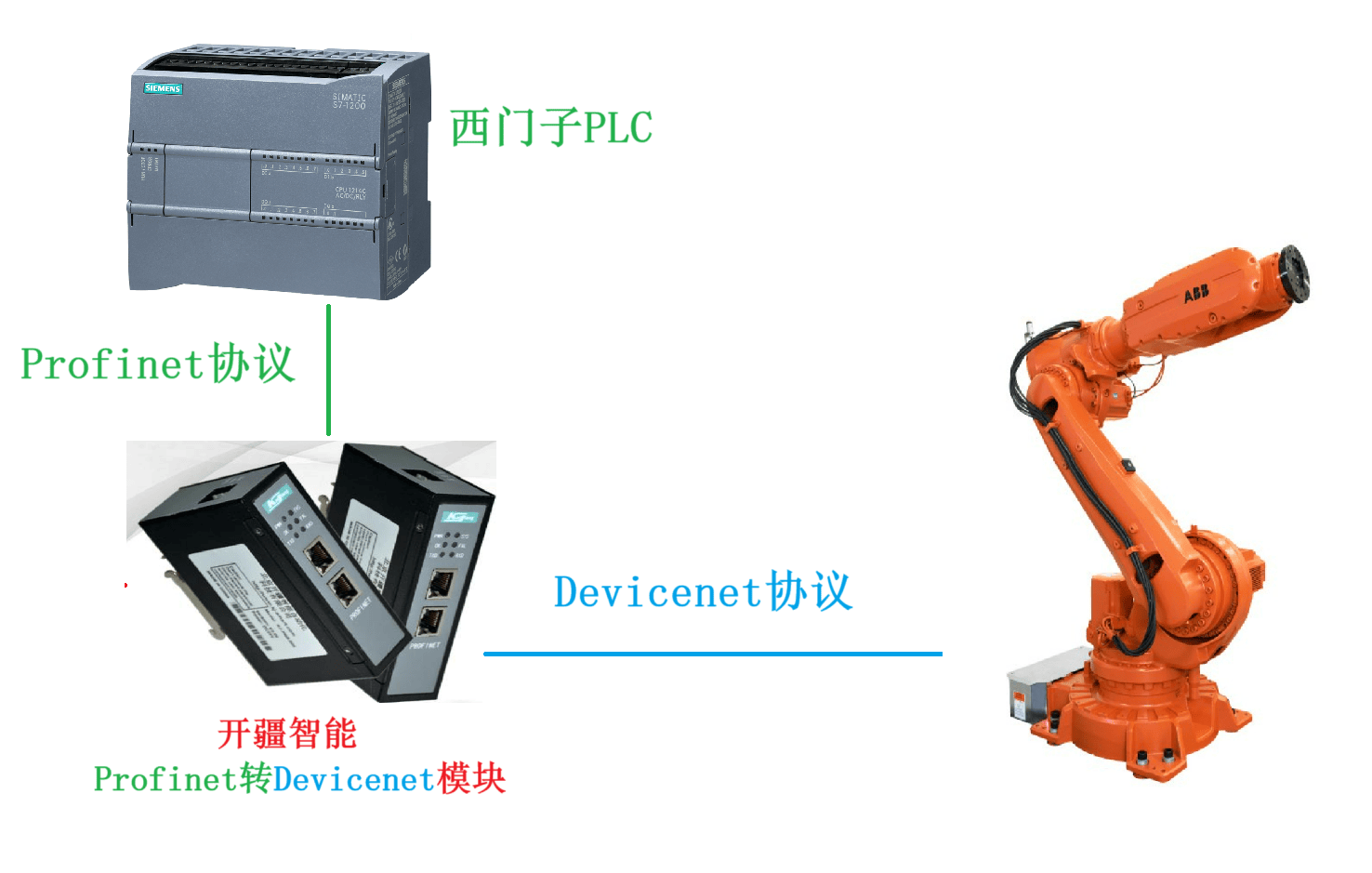
開疆智能Profinet轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人配置案例
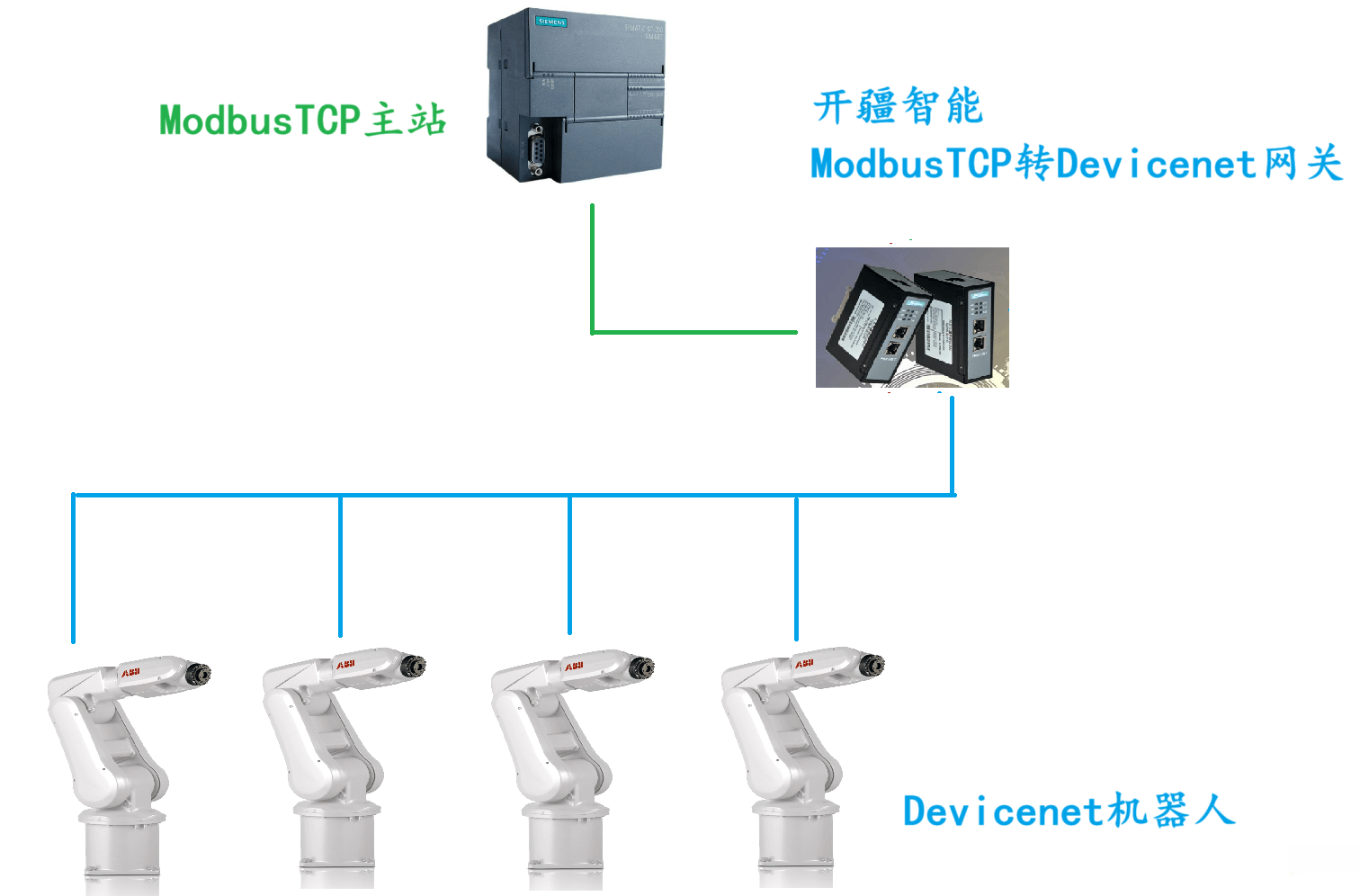
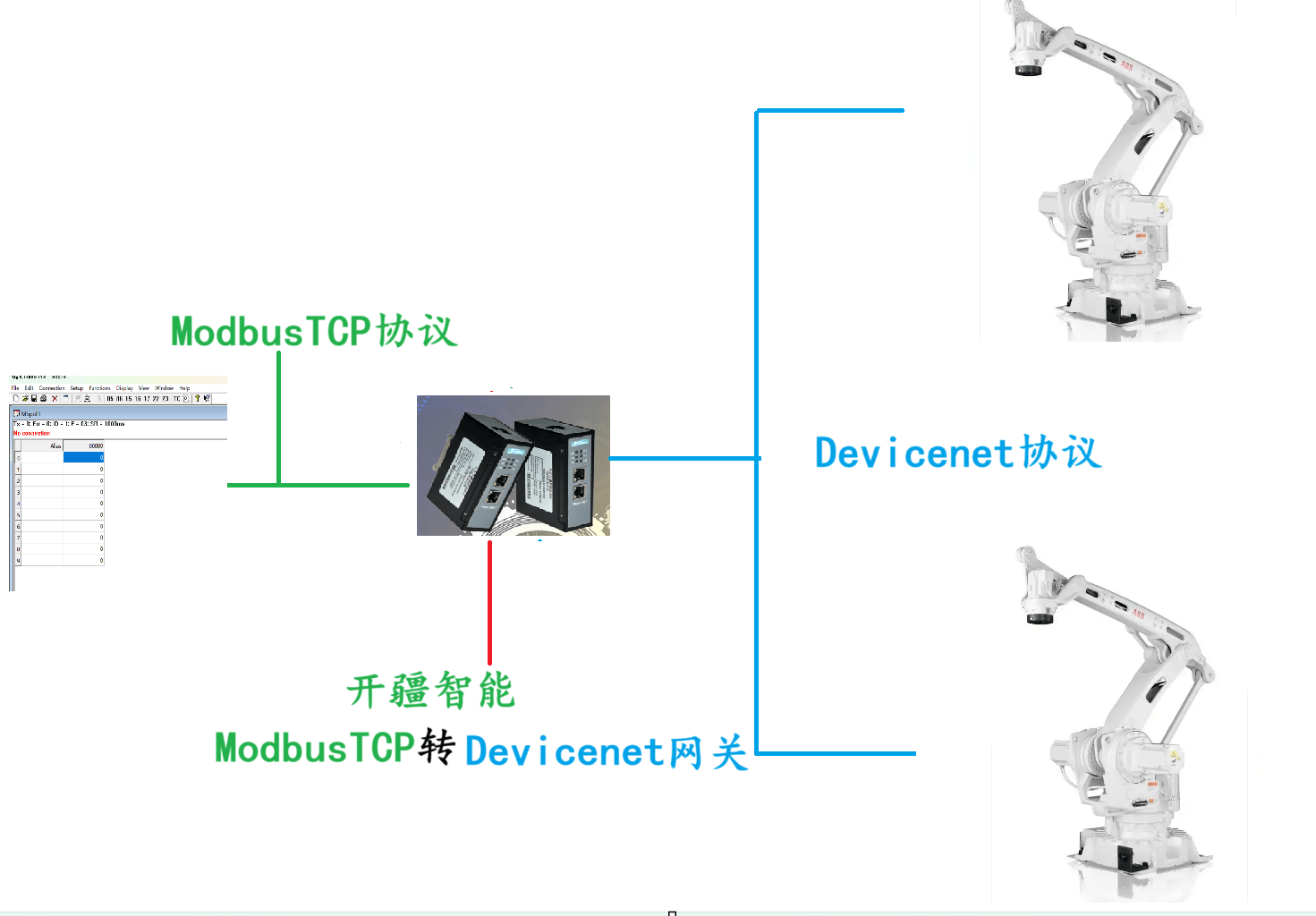
開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接機器人配置案例
開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接FANUC機器人配置案例

開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接三菱PLC與ABB機器人配置案例

開疆智能ModbusTCP轉(zhuǎn)Devicenet網(wǎng)關(guān)連接ABB機器人配置案例
工業(yè)通信界的“月老”:CC\\-Link IE和DeviceNet如何牽起機器人的“紅線”
橋接智能制造:PROFINET與Devicenet混合架構(gòu)賦能汽車擦凈機器人升級

開疆智能Profient轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接ABB機器人MODBUS TCP通訊案例




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論