本文針對(duì)旋轉(zhuǎn)編碼器在工業(yè)現(xiàn)場(chǎng)中的應(yīng)用,基于LPCI768硬件平臺(tái),設(shè)計(jì)出一種旋轉(zhuǎn)編碼器采集模塊,該模塊內(nèi)部具有高精度分析、整形、解碼電路,可同時(shí)對(duì)2路編碼器輸入信號(hào)進(jìn)行分析、解碼。經(jīng)過(guò)處理的旋轉(zhuǎn)信號(hào)
2016-01-19 10:00:52 14075
14075 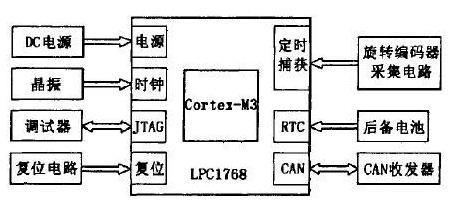
在本篇文章中,我們將學(xué)習(xí)如何在Arduino開(kāi)發(fā)板上使用旋轉(zhuǎn)編碼器。我們將以帶符號(hào)的數(shù)字同時(shí)顯示順時(shí)針和逆時(shí)針?lè)较虻?b class="flag-6" style="color: red">編碼值。 所需的組件 ● Arduino UNO開(kāi)發(fā)板 ● 旋轉(zhuǎn)編碼器
2020-10-26 15:47:249003 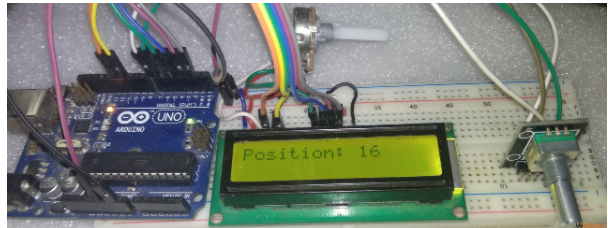
旋轉(zhuǎn)編碼器 SPST-NC 垂直
2024-03-14 23:20:28
旋轉(zhuǎn)編碼器 SPST-NC 垂直
2024-03-14 23:20:28
旋轉(zhuǎn)編碼器 光學(xué) 24 正交,2 位 用戶(hù)可選
2024-03-14 21:11:28
大家有沒(méi)有用51單片機(jī)寫(xiě)過(guò)三相8線即A A- B B- Z Z- VCC GND旋轉(zhuǎn)編碼器的程序,求相應(yīng)的參考程序,先謝謝了
2016-05-29 20:45:37
我現(xiàn)在想買(mǎi)一個(gè)旋轉(zhuǎn)編碼器,用來(lái)反饋電機(jī)的位置(只是反饋電機(jī)的位置信號(hào),并不是驅(qū)動(dòng)電機(jī),因?yàn)槲矣?b class="flag-6" style="color: red">旋轉(zhuǎn)變壓器跟驅(qū)動(dòng)器來(lái)驅(qū)動(dòng)電機(jī),只是想用電機(jī)的位置信號(hào)),但是旋轉(zhuǎn)編碼器的輸出信號(hào)是方波信號(hào),我應(yīng)該怎么處理成正弦波信號(hào)呢?比如說(shuō)轉(zhuǎn)一轉(zhuǎn)輸出一個(gè)正弦波,先謝謝大家了。
2017-07-13 10:17:04
旋轉(zhuǎn)編碼器如何進(jìn)行編程?
2022-01-21 06:56:41
一、介紹?? 旋轉(zhuǎn)編碼器是一種機(jī)電裝置,可將軸或軸的角位置或運(yùn)動(dòng),轉(zhuǎn)換為模擬或數(shù)字代碼。旋轉(zhuǎn)編碼器通常放置在垂直于軸的一側(cè)。旋轉(zhuǎn)編碼器用作檢測(cè)自動(dòng)化領(lǐng)域中的角度,速度,長(zhǎng)度,位置和加速度的傳感器。二
2021-06-30 07:37:51
旋轉(zhuǎn)編碼器是一種經(jīng)過(guò)驗(yàn)證的流行解決方案,用于測(cè)量旋轉(zhuǎn)軸的速度,運(yùn)動(dòng)方向或位置。有幾種不同的類(lèi)型,主要的兩種是絕對(duì)編碼器和增量編碼器。是如何工作的?有什么不同?如何為應(yīng)用選擇合適的類(lèi)型?
2021-01-01 07:46:31
旋轉(zhuǎn)編碼器的主要原理是什么?
2022-01-21 07:08:12
在數(shù)字時(shí)代,需要快速高效地測(cè)量電機(jī)或旋轉(zhuǎn)儀器旋鈕上的機(jī)械軸的旋轉(zhuǎn)。諸如電位計(jì)和旋轉(zhuǎn)開(kāi)關(guān)之類(lèi)的模擬方法正在被可將旋轉(zhuǎn)運(yùn)動(dòng)直接數(shù)字化的旋轉(zhuǎn)編碼器所取代,但設(shè)計(jì)人員需要能夠理解各種編碼器類(lèi)型之間的差異,并
2021-02-22 06:09:31
旋轉(zhuǎn)編碼器原理
2022-01-12 08:02:58
大神們,單個(gè)旋轉(zhuǎn)編碼器旋轉(zhuǎn)沒(méi)有問(wèn)題,但是多個(gè)寫(xiě)好程序后旋轉(zhuǎn)會(huì)發(fā)生錯(cuò)誤,有時(shí)正轉(zhuǎn)會(huì)出現(xiàn)反轉(zhuǎn),反轉(zhuǎn)出現(xiàn)正轉(zhuǎn),有時(shí)還會(huì)自己發(fā)生正轉(zhuǎn)反轉(zhuǎn),有誰(shuí)知道是怎么回事嗎?
2022-06-07 11:11:49
使用光電旋轉(zhuǎn)編碼器有A、B兩相。要達(dá)到的效果是:光電旋轉(zhuǎn)編碼器能夠判定正反轉(zhuǎn),按鍵控制光電旋轉(zhuǎn)編碼器的電源,按鍵按下,光電旋轉(zhuǎn)編碼器上電,按鍵松開(kāi),光電旋轉(zhuǎn)編碼器掉電,只有在按鍵按下并且碼盤(pán)轉(zhuǎn)動(dòng)
2018-07-30 09:09:58
旋轉(zhuǎn)編碼器 絕對(duì) 可編程 PWM
2024-06-21 01:53:44
旋轉(zhuǎn)編碼器 512
2024-06-21 01:53:45
旋轉(zhuǎn)編碼器 512
2024-06-21 01:53:15
旋轉(zhuǎn)編碼器 絕對(duì) 100 BiSS-C
2024-06-21 01:53:15
旋轉(zhuǎn)編碼器 磁性 1024 PWM
2024-06-19 23:55:51
旋轉(zhuǎn)編碼器 磁性 PWM
2024-05-22 23:42:49
旋轉(zhuǎn)編碼器 磁性 正交(增量)
2024-06-19 23:55:51
旋轉(zhuǎn)編碼器 磁性 正交(增量)
2024-06-19 23:55:51
旋轉(zhuǎn)編碼器 磁性 4096 正交(增量)
2024-06-19 23:55:51
旋轉(zhuǎn)編碼器 磁性 可編程 換向,PWM,SPI,帶分度(增量)正交輸出
2023-11-07 22:15:24
旋轉(zhuǎn)編碼器 磁性 正交(增量)
2024-06-19 23:55:50
旋轉(zhuǎn)編碼器 SMD
2024-06-19 09:13:12
旋轉(zhuǎn)編碼器 傳感器 Qwiic 平臺(tái)評(píng)估擴(kuò)展板
2024-03-14 22:33:34
增量式旋轉(zhuǎn)編碼器 7.5x3.1mm 1.6N 1000000次 0.55mA 5VDC
2023-06-01 10:37:42
增量式旋轉(zhuǎn)編碼器 7.6x6.2x2.7mm 1.6N 1000000次 0.55mA 5VDC
2023-03-24 15:02:12
旋轉(zhuǎn)編碼器 機(jī)械 8 正交(增量) 垂直
2024-06-19 22:04:51
TCUT1600X01 旋轉(zhuǎn)編碼器 傳感器 mikroBUS? Click? 平臺(tái)評(píng)估擴(kuò)展板
2024-03-14 22:03:08
AEAT-8800-Q24 旋轉(zhuǎn)編碼器 傳感器 mikroBUS? Click? 平臺(tái)評(píng)估擴(kuò)展板
2024-03-14 22:03:06
EC12D,PCA9956B 旋轉(zhuǎn)編碼器 傳感器 mikroBUS? Click? 平臺(tái)評(píng)估擴(kuò)展板
2024-03-14 22:03:13
AEDR-8300 旋轉(zhuǎn)編碼器 傳感器 mikroBUS? Click? 平臺(tái)評(píng)估擴(kuò)展板
2024-03-14 22:03:16
旋轉(zhuǎn)編碼器 磁性 I2C,PWM
2023-10-11 11:30:43
旋轉(zhuǎn)編碼器 絕對(duì) 葛萊碼(絕對(duì)) 垂直
2024-03-14 20:51:13
旋轉(zhuǎn)編碼器 絕對(duì) 葛萊碼(絕對(duì)) 垂直
2024-03-14 20:51:12
旋轉(zhuǎn)編碼器 絕對(duì) 葛萊碼(絕對(duì)) 垂直
2024-03-14 20:51:13
旋轉(zhuǎn)編碼器 絕對(duì) 葛萊碼(絕對(duì)) 垂直
2024-03-14 20:51:13
旋轉(zhuǎn)編碼器 絕對(duì) 葛萊碼(絕對(duì)) 垂直
2024-03-14 20:51:12
旋轉(zhuǎn)編碼器 機(jī)械 15 正交(增量) 垂直
2024-03-14 23:11:08
旋轉(zhuǎn)編碼器機(jī)械24PPR
2023-03-24 15:09:25
旋轉(zhuǎn)編碼器 增量式 15 正交,2 位 垂直
2024-03-14 23:11:08
旋轉(zhuǎn)編碼器 增量式 15 正交,2 位 垂直
2024-03-14 23:11:08
旋轉(zhuǎn)編碼器 增量式 15 正交,2 位 垂直
2024-03-14 23:11:08
旋轉(zhuǎn)編碼器 手動(dòng)控制 三件套
2024-06-20 15:45:48
旋轉(zhuǎn)編碼器 手動(dòng)控制 三件套
2024-06-20 15:48:23
旋轉(zhuǎn)編碼器適配器板 - 磁座
2024-03-14 20:43:33
旋轉(zhuǎn)編碼器的原理是什么?如何去編寫(xiě)STM32配置Arduino的程序?STM32 Arduino是如何讀取編碼器和旋轉(zhuǎn)位置方向的?
2021-11-15 08:01:24
如題~~proteus庫(kù)里面沒(méi)有旋轉(zhuǎn)編碼器嗎?
2015-04-18 21:52:53
請(qǐng)問(wèn)有沒(méi)有了解增量式旋轉(zhuǎn)編碼器的高手,幫我解決一下一直困擾我問(wèn)題:1.關(guān)于編碼器內(nèi)部的內(nèi)插細(xì)分 有的碼器的內(nèi)插細(xì)分值有1,2,4,6,10,16等,每一個(gè)旋轉(zhuǎn)編碼器有一個(gè)固定的內(nèi)插細(xì)分值還是有多個(gè)
2011-10-16 14:30:25
如何利用旋轉(zhuǎn)編碼器實(shí)現(xiàn)計(jì)數(shù)?
2022-01-21 07:28:40
怎么設(shè)計(jì)一種旋轉(zhuǎn)編碼器采集模塊?如何實(shí)現(xiàn)旋轉(zhuǎn)編碼器采集模塊的硬件設(shè)計(jì)?如何實(shí)現(xiàn)旋轉(zhuǎn)編碼器采集模塊的軟件設(shè)計(jì)?
2021-04-19 08:12:53
旋轉(zhuǎn)編碼器應(yīng)用注意事項(xiàng)一. ※增量旋轉(zhuǎn)編碼器選型應(yīng)注意三方面的參數(shù):1.械安裝尺寸,包括定位止口,軸徑,安裝孔位;電纜出線方式;安裝空間體積;工作環(huán)境防護(hù)等級(jí)
2010-09-01 15:42:42 221
221 如果要在增量型編碼器后方安裝額外的部件,就可以使用RHI 74產(chǎn)品線系列的增量型編碼器.為此,該旋轉(zhuǎn)編碼器使用一個(gè)安全穿過(guò)本體的空心軸套.該增量型旋轉(zhuǎn)編碼器直接安裝
2010-10-08 07:49:5545
伺服回路用旋轉(zhuǎn)編碼器電路
2009-02-09 14:01:311982 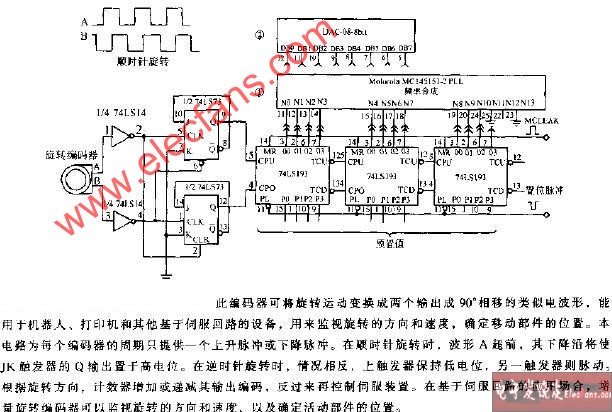
旋轉(zhuǎn)編碼器電路
2009-02-09 16:18:483724 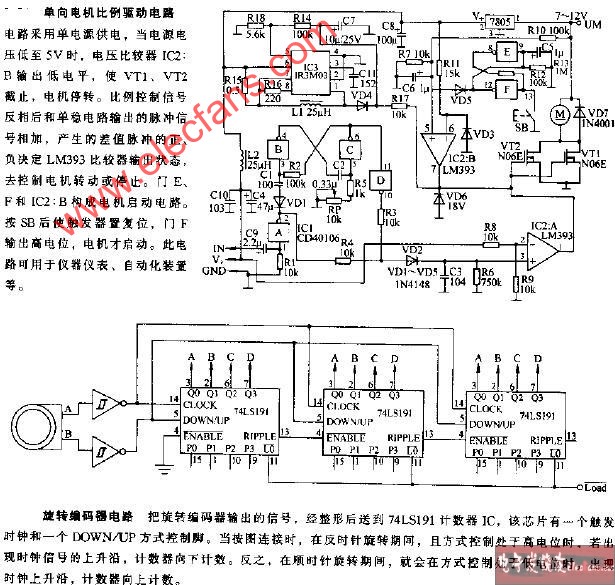
旋轉(zhuǎn)編碼器電路
2009-04-26 12:02:172569 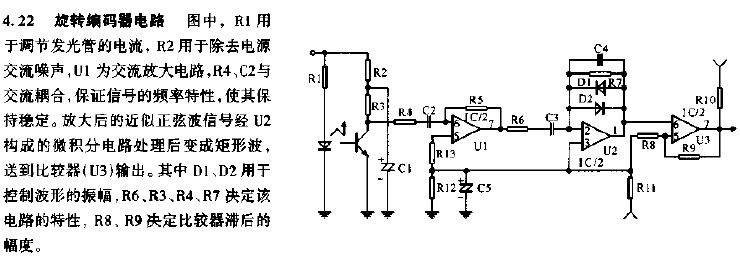
旋轉(zhuǎn)編碼器檢測(cè)轉(zhuǎn)動(dòng)方向的電路
2009-04-26 15:33:234561 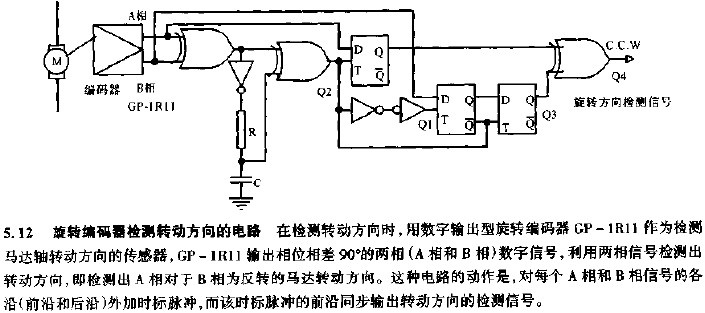
旋轉(zhuǎn)式編碼器,旋轉(zhuǎn)式編碼器是什么意思
旋轉(zhuǎn)式編碼器概要
旋轉(zhuǎn)式編碼器的定義 旋轉(zhuǎn)式編碼
2010-03-03 15:27:382627 旋轉(zhuǎn)編碼器是用來(lái)測(cè)量轉(zhuǎn)速的裝置,光電式旋轉(zhuǎn)編碼器通過(guò)光電轉(zhuǎn)換,可將輸出軸的角位移、角速度等機(jī)械量轉(zhuǎn)換成相應(yīng)的電脈沖以數(shù)字量輸出(REP)。它分為單路輸出和雙路輸出兩種。
2011-09-02 14:20:15144 旋轉(zhuǎn)編碼器抗抖動(dòng)接口電路設(shè)計(jì)
2013-09-26 14:48:5488 數(shù)字撥盤(pán)(旋轉(zhuǎn)編碼器)原理圖都是值得參考的設(shè)計(jì)。
2016-05-11 17:11:4429 便捷手搖型增量旋轉(zhuǎn)編碼器特點(diǎn):適用于數(shù)控機(jī)床,磨床等的手動(dòng)脈沖輸入、緊急停止開(kāi)關(guān),ENABLE開(kāi)關(guān)、適用于4位,6位旋轉(zhuǎn)開(kāi)關(guān)。編碼器如以信號(hào)原理來(lái)分,有增量型編碼器,絕對(duì)型編碼器。我們通常用的是增量
2017-10-25 09:47:3219 旋轉(zhuǎn)編碼器是用來(lái)測(cè)量轉(zhuǎn)速并配合PWM技術(shù)可以實(shí)現(xiàn)快速調(diào)速的裝置,光電式旋轉(zhuǎn)編碼器通過(guò)光電轉(zhuǎn)換,可將輸出軸的角位移、角速度等機(jī)械量轉(zhuǎn)換成相應(yīng)的電脈沖以數(shù)字量輸出(REP)。
2017-11-10 10:59:487252 關(guān)于旋轉(zhuǎn)編碼器,是屬于編碼器當(dāng)中的一種,主要起到了檢測(cè)機(jī)械運(yùn)動(dòng)的速度、位置、角度、距離等參數(shù)的作用。把編碼器作為信號(hào)檢測(cè)的方法已被廣泛應(yīng)用于各個(gè)行業(yè)。
2018-11-15 10:13:5915114 旋轉(zhuǎn)編碼器是用來(lái)測(cè)量轉(zhuǎn)速并配合PWM技術(shù)可以實(shí)現(xiàn)快速調(diào)速的裝置,可將軸的角位移。速度機(jī)械量轉(zhuǎn)換成相應(yīng)的電泳沖量輸出。,一路輸出是指旋轉(zhuǎn)編碼器的輸出是一組脈沖,而雙路輸出的旋轉(zhuǎn)編碼器輸出兩組A/B
2018-11-15 10:32:264108 旋轉(zhuǎn)編碼器它是一種將旋轉(zhuǎn)位移轉(zhuǎn)換成一串?dāng)?shù)字脈沖信號(hào)的旋轉(zhuǎn)式傳感器,這些脈沖能用來(lái)控制角位移,如果將編碼器與齒輪條或螺旋絲杠結(jié)合在一起,也能夠用于測(cè)量直線位移。
2018-12-04 16:47:0115055 關(guān)鍵詞:旋轉(zhuǎn)編碼器 旋轉(zhuǎn)編碼器分類(lèi) 根據(jù)檢測(cè)原理,旋轉(zhuǎn)編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式。根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式、絕對(duì)式以及混合式三種。 1.1增量式編碼器 增量式編碼器
2019-03-29 15:15:035293 旋轉(zhuǎn)編碼器是一種光電式旋轉(zhuǎn)丈量設(shè)備,它將被測(cè)的角位移直接改換成數(shù)字信號(hào)(高速脈沖信號(hào))。因而可將旋轉(zhuǎn)編碼器的輸出脈沖信號(hào)直接輸入給plc,運(yùn)用PLC的高速計(jì)數(shù)器對(duì)其脈沖信號(hào)進(jìn)行計(jì)數(shù),歐姆龍觸摸屏,以取得丈量成果。
2019-08-06 11:15:2633266 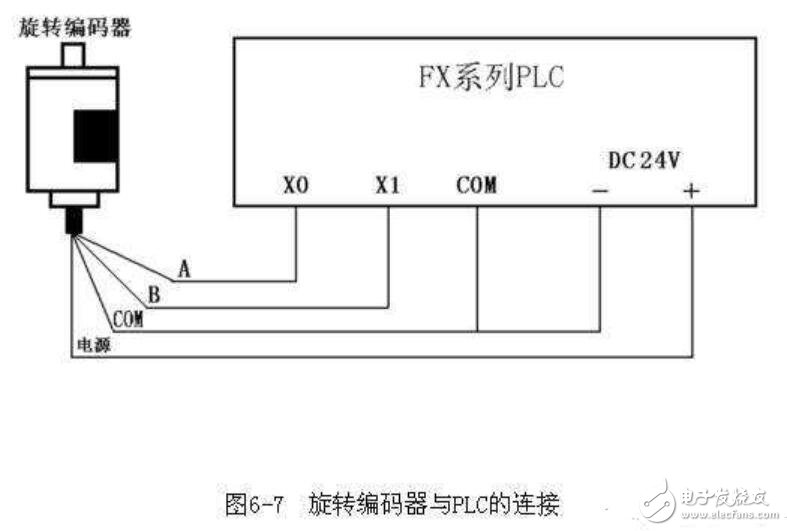
本文主要介紹了旋轉(zhuǎn)編碼器參數(shù)以及與plc的連接方法。在我們選擇旋轉(zhuǎn)編碼器的時(shí)候會(huì)有一些專(zhuān)業(yè)術(shù)語(yǔ)的參數(shù),這些專(zhuān)業(yè)術(shù)語(yǔ)是什么含義呢?我們來(lái)了解一下后更清楚的定位我們需要的旋轉(zhuǎn)編碼器參數(shù)才會(huì)更準(zhǔn)確。
2019-08-06 11:24:176274 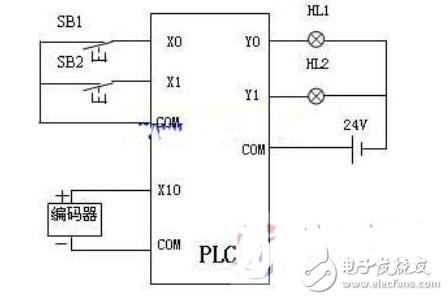
本文主要介紹了旋轉(zhuǎn)編碼器測(cè)量及安裝方法。旋轉(zhuǎn)編碼器檢測(cè)直線位移方法具體如下:使用“彈性連軸器”將旋轉(zhuǎn)編碼器與驅(qū)動(dòng)直線位移的動(dòng)力裝置的主軸直接聯(lián)軸。
2019-08-06 11:40:504614 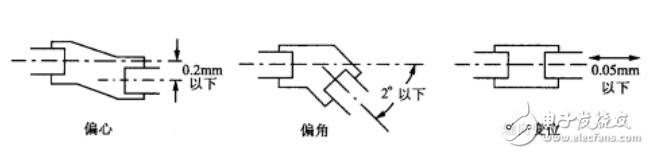
本文首先介紹了旋轉(zhuǎn)編碼器拆卸方法,其次闡述了旋轉(zhuǎn)編碼器更換步驟,最后介紹了旋轉(zhuǎn)編碼器型號(hào)說(shuō)明。
2019-08-06 11:48:3318870 本文首先介紹了旋轉(zhuǎn)編碼器更換步驟,其次介紹了旋轉(zhuǎn)編碼器更換注意事項(xiàng),最后介紹了旋轉(zhuǎn)編碼器替換原則。
2019-08-06 14:18:3810247 本文主要介紹了旋轉(zhuǎn)編碼器電路原理圖。增量式編碼器軸旋轉(zhuǎn)時(shí),有相應(yīng)的相位輸出。其旋轉(zhuǎn)方向的判別和脈沖數(shù)量的增減,需借助后部的判向電路和計(jì)數(shù)器來(lái)實(shí)現(xiàn)。其計(jì)數(shù)起點(diǎn)可任意設(shè)定,并可實(shí)現(xiàn)多圈的無(wú)限累加和測(cè)量
2019-08-06 14:25:5821886 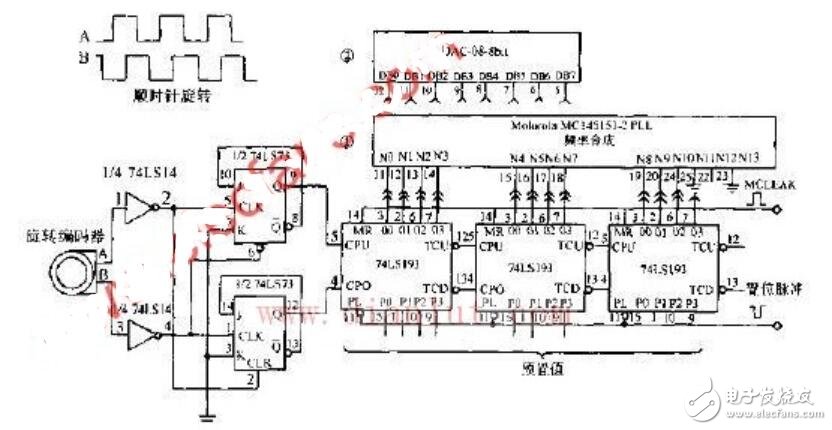
旋轉(zhuǎn)編碼器在電路中的應(yīng)用,主要是編碼器脈沖識(shí)別使用單片機(jī)的。具體就是看A,B相位差,A超前B還是滯后,以確定編碼器是正轉(zhuǎn)還是反轉(zhuǎn),這稱(chēng)為旋轉(zhuǎn)編碼器通過(guò)方向識(shí)別電路的應(yīng)用。
2020-07-26 11:28:152883 旋轉(zhuǎn)編碼器分為增量型編碼器絕對(duì)型編碼器兩種,型號(hào)有EC08、EC11、EC12、EC16;增量型編碼器比較通用;絕對(duì)型編碼器價(jià)格要貴一些,而且絕對(duì)型編碼器有量程范圍,所以一般在特殊需要的機(jī)床
2020-12-02 17:34:045363 旋轉(zhuǎn)編碼器(Rotary Encoder)是一種幫助用戶(hù)與系統(tǒng)交互的輸入設(shè)備。它看起來(lái)更像是一個(gè)無(wú)線電電位器,但它輸出一系列脈沖,使其應(yīng)用??獨(dú)特。當(dāng)旋轉(zhuǎn)編碼器的旋鈕時(shí),它以小步進(jìn)的形式旋轉(zhuǎn),這有
2021-11-16 12:36:0126 隨著儀器的快速發(fā)展,編碼器在生產(chǎn)中起到了很大的作用,市場(chǎng)上應(yīng)用比例比較高, 旋轉(zhuǎn)編碼器屬精密元件,這主要因?yàn)?b class="flag-6" style="color: red">旋轉(zhuǎn)編碼器周?chē)蓴_比較嚴(yán)重,比如:是否有大型電動(dòng)機(jī)、電焊機(jī)頻繁起動(dòng)造成干擾,是否和動(dòng)力線
2022-01-10 11:27:0112101 旋轉(zhuǎn)編碼器可通過(guò)旋轉(zhuǎn)可以計(jì)數(shù)正方向和反方向轉(zhuǎn)動(dòng)過(guò)程中輸出脈沖的次數(shù),旋轉(zhuǎn)計(jì)數(shù)不像電位計(jì),這種轉(zhuǎn)動(dòng)計(jì)數(shù)是沒(méi)有限制的。配合旋轉(zhuǎn)編碼器上的按鍵,可以復(fù)位到初始狀態(tài),即從0開(kāi)始計(jì)數(shù)。
2022-05-10 15:06:4921 今天再分享一個(gè)小技巧 - 如何使用一個(gè)MCU的模擬輸入端口連接多個(gè)旋轉(zhuǎn)編碼器?
2022-05-09 14:29:297092 在本文中,我們將了解不同類(lèi)型的旋轉(zhuǎn)編碼器及其工作原理。我們還將它與 Arduino 連接,并通過(guò)旋轉(zhuǎn)編碼器來(lái)控制整數(shù)的值,并在 16*2 LCD 屏幕上顯示其值。在本教程結(jié)束時(shí),您將習(xí)慣于為您的項(xiàng)目使用旋轉(zhuǎn)編碼器。所以讓我們開(kāi)始吧...
2022-11-10 16:04:197659 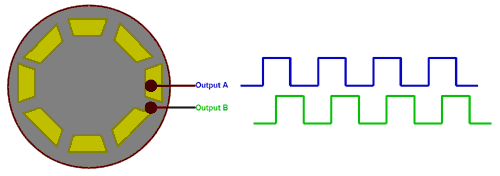
電子發(fā)燒友網(wǎng)站提供《如何使用KY 040旋轉(zhuǎn)編碼器的示例.zip》資料免費(fèi)下載
2022-11-16 11:43:074 為了快速,準(zhǔn)確地控制這些設(shè)備,必須檢測(cè)設(shè)備的運(yùn)動(dòng)狀態(tài)。因此,使用稱(chēng)為編碼器的傳感器來(lái)檢測(cè)旋轉(zhuǎn)角度,移動(dòng)距離和旋轉(zhuǎn)/移動(dòng)速度。
2022-11-16 11:47:097792 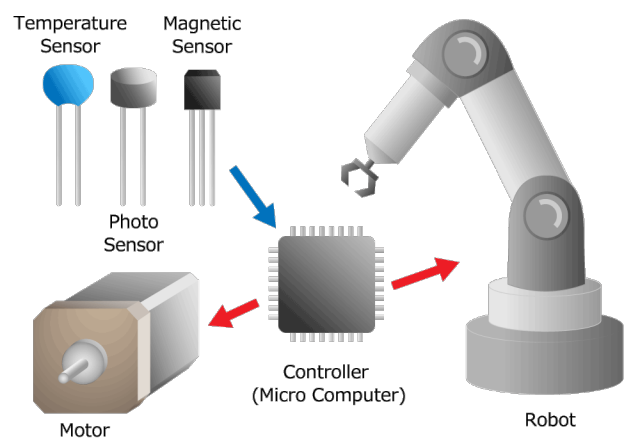
旋轉(zhuǎn)編碼器是一種常見(jiàn)的傳感器,它能夠通過(guò)檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-06-09 10:16:352847 
編碼器種類(lèi)及型號(hào):最常見(jiàn)的編碼器類(lèi)型是旋轉(zhuǎn)編碼器和線性編碼器。旋轉(zhuǎn)編碼器通常用于測(cè)量機(jī)器人的關(guān)節(jié)位置,以及測(cè)量車(chē)輛和船只的轉(zhuǎn)向角度。線性編碼器通常用于測(cè)量運(yùn)動(dòng)平臺(tái)的位置和速度。旋轉(zhuǎn)編碼器和線性編碼器可以分為絕對(duì)式和增量式編碼器。絕對(duì)式編碼器可以直接讀取位置信息,而增量式編碼器則需要計(jì)算位置信息。
2023-05-18 11:15:008137 
旋轉(zhuǎn)編碼器是什么?淺讀旋轉(zhuǎn)編碼器工作原理與特點(diǎn)及應(yīng)用:旋轉(zhuǎn)編碼器是一種常見(jiàn)的傳感器,它能夠通過(guò)檢測(cè)旋轉(zhuǎn)軸的轉(zhuǎn)動(dòng)實(shí)現(xiàn)實(shí)時(shí)位置監(jiān)測(cè)與控制。它具有高精度、長(zhǎng)壽命、可重復(fù)性高、體積小等特點(diǎn),因此在機(jī)器人控制、自動(dòng)化生產(chǎn)、醫(yī)療設(shè)備、輪廓檢測(cè)等方面被廣泛應(yīng)用。
2023-05-29 09:21:154772 
在旋轉(zhuǎn)、直線編碼器及磁柵尺中得到廣泛應(yīng)用的兩款產(chǎn)品:“磁性傳感器”及“插補(bǔ)細(xì)分器”。
2023-10-12 18:17:132468 旋轉(zhuǎn)編碼器更換步驟第一步,卸開(kāi)電機(jī)后蓋,編碼器的后蓋。第二步,松開(kāi)編碼器安裝螺絲。第三步,旋轉(zhuǎn)電機(jī)轉(zhuǎn)子軸,使編碼器轉(zhuǎn)子上的標(biāo)志和編碼器殼上的標(biāo)志重合。第四步,卸下編碼器,注意在裝卸的時(shí)候盡量使用特制
2023-11-12 08:07:203002 
旋轉(zhuǎn)編碼器是用于測(cè)量軸或軸旋轉(zhuǎn)的組件。它們通常用于音頻設(shè)備、DIY 游戲控制器中的音量旋鈕,或用作不同 Arduino 或 Raspberry Pi 項(xiàng)目的輸入設(shè)備。
2024-02-11 09:53:009599 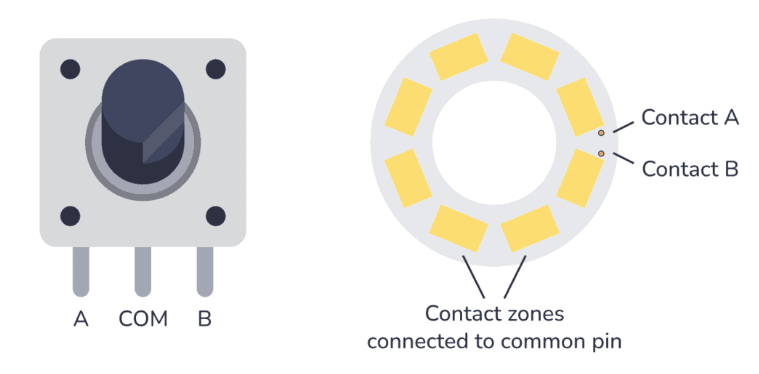
在工業(yè)自動(dòng)化和精密測(cè)量領(lǐng)域中,旋轉(zhuǎn)編碼器是一種不可或缺的設(shè)備。它能夠?qū)?b class="flag-6" style="color: red">旋轉(zhuǎn)位置或旋轉(zhuǎn)量轉(zhuǎn)換成模擬或數(shù)字信號(hào),為控制系統(tǒng)提供精確的位置和速度信息。隨著技術(shù)的不斷發(fā)展,旋轉(zhuǎn)編碼器的類(lèi)型也日益豐富。本文將
2024-05-29 15:59:292119 在工業(yè)自動(dòng)化領(lǐng)域,旋轉(zhuǎn)編碼器與可編程邏輯控制器(PLC)的結(jié)合應(yīng)用極為廣泛。旋轉(zhuǎn)編碼器通過(guò)提供精確的旋轉(zhuǎn)角度或位置信息,為PLC提供反饋信號(hào),進(jìn)而實(shí)現(xiàn)對(duì)設(shè)備的精確控制。本文將詳細(xì)介紹旋轉(zhuǎn)編碼器在PLC中的編程方法,并結(jié)合實(shí)際應(yīng)用案例進(jìn)行闡述。
2024-06-17 09:24:064373 旋轉(zhuǎn)編碼器控制電機(jī)速度
2024-06-24 09:16:177 旋轉(zhuǎn)編碼器(Rotary Encoder),也稱(chēng)為軸編碼器,是一種將旋轉(zhuǎn)的機(jī)械位移量轉(zhuǎn)換為電氣信號(hào)的傳感器。這些電氣信號(hào)經(jīng)過(guò)處理后,可以用于檢測(cè)位置、速度等參數(shù)。旋轉(zhuǎn)編碼器廣泛應(yīng)用于工業(yè)控制、機(jī)器人
2024-07-04 17:17:298258 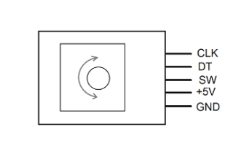
旋轉(zhuǎn)編碼器是一種精密的測(cè)量裝置,主要用于將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為可測(cè)量的電信號(hào)。它可以收集并發(fā)出多種信號(hào),但主要的是與旋轉(zhuǎn)運(yùn)動(dòng)相關(guān)的位置、速度或角度等物理量的信號(hào)。具體來(lái)說(shuō),旋轉(zhuǎn)編碼器可以收集并發(fā)出以下信號(hào):
2024-10-01 16:55:002655 電子發(fā)燒友網(wǎng)站提供《增量旋轉(zhuǎn)編碼器.pdf》資料免費(fèi)下載
2024-09-03 11:51:146
 電子發(fā)燒友App
電子發(fā)燒友App








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論