電子發(fā)燒友網(wǎng)>接口/總線/驅(qū)動(dòng)>
接口/總線/驅(qū)動(dòng)
權(quán)威的接口/總線/驅(qū)動(dòng)技術(shù)專欄,內(nèi)容有接口/總線/驅(qū)動(dòng)培圳資料以及應(yīng)用知識等;涉及接口/總線/驅(qū)動(dòng)的芯片、技術(shù)、設(shè)計(jì)方法和應(yīng)用文章。

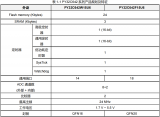
32位ARM?Cortex?-M0+微控制器-PY32C642產(chǎn)品介紹
PY32C642 系列微控制器采用高性能的32位 ARM?Cortex?-M0+內(nèi)核,寬電壓工作范圍的 MCU。...
2023-09-20 標(biāo)簽:微控制器比較器定時(shí)器ADC采樣SRAM存儲(chǔ)器 2692
基于RT-Thread的RoboMaster電控框架(三)
使用的開發(fā)板為大疆的 RoboMaster-C 型開發(fā)板,基礎(chǔ)工程為 rt-thread>bsp>stm32f407-robomaster-c...
2023-09-20 標(biāo)簽:傳感器驅(qū)動(dòng)器加速度計(jì)STM32F407RT-Thread 1978


關(guān)于DPU技術(shù)應(yīng)用及技術(shù)原理
讓我們?nèi)媪私庖幌翫PU——它包括外部網(wǎng)絡(luò)接口,可以通過NVMeoF/TCP和RoCE協(xié)議進(jìn)行通信,還有內(nèi)部PCIe接口,可以將NVMe通信為根復(fù)合體(Root Complex)或終端設(shè)備(Endpoint)。...
2023-09-20 標(biāo)簽:處理器芯片數(shù)據(jù)中心DPUPCIe 3175

機(jī)器視覺常用接口介紹
機(jī)器視覺中常見的數(shù)據(jù)接口闡述。Cameralink、GigE Vision接口、CoaXPress (CXP)接口。...
2023-09-20 標(biāo)簽:USB3.0數(shù)據(jù)接口機(jī)器視覺工業(yè)相機(jī) 2419
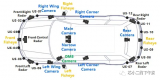
L2+ADAS/AD傳感器及系統(tǒng)架構(gòu)設(shè)計(jì)
可以看到類似地平線的J5,提供了非常強(qiáng)悍的AI算力,如J5的單一芯片算力為128TOPS,但是其提供的CPU算力卻非常有限,J5的CPU算力是26K...
2023-09-20 標(biāo)簽:傳感器自動(dòng)駕駛地平線域控制器 1623
基于HMI_Board的時(shí)鐘小工具實(shí)現(xiàn)
本人是嵌入式開發(fā)新手,什么都想玩玩。對于rtos開發(fā)興趣很大,rtt中文資料全,更新很頻繁,所以學(xué)習(xí)rtt是個(gè)很好的方向。...
2023-09-20 標(biāo)簽:按鍵中斷RTThreadHMI系統(tǒng)LVGL 1393
處理跨時(shí)鐘域(CDC)信號同步的最常見方法
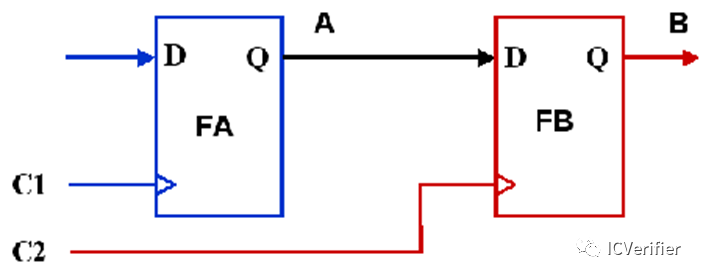
跨時(shí)鐘域( **Clock Domain Crossing,CDC** )通俗地講,就是 **模塊之間數(shù)據(jù)交互時(shí)用的不是同一個(gè)時(shí)鐘進(jìn)行驅(qū)動(dòng)** ,如下圖所示:左邊的模塊FA由C1驅(qū)動(dòng),屬于C1時(shí)鐘域;右邊的模塊FB由C2驅(qū)動(dòng),屬于C2時(shí)...
2023-09-20 標(biāo)簽:觸發(fā)器同步器FIFO存儲(chǔ)時(shí)鐘驅(qū)動(dòng)器SRAM存儲(chǔ)器 6569

使用普通的多路復(fù)用器進(jìn)行切換時(shí)鐘會(huì)發(fā)生什么?
在現(xiàn)代芯片中,芯片運(yùn)行時(shí)有必要在兩個(gè)不同的時(shí)鐘之間切換。如果我們使用普通的多路復(fù)用器進(jìn)行切換時(shí)鐘會(huì)發(fā)生什么?...
2023-09-20 標(biāo)簽:時(shí)鐘鎖存器多路復(fù)用器觸發(fā)器CLK時(shí)鐘切換電路 2738

IC設(shè)計(jì):接口X態(tài)隔離設(shè)計(jì)
雖然真實(shí)芯片中,寄存器初始狀態(tài)值只會(huì)為1或者為0。但是在RTL級仿真過程中X態(tài)的傳播經(jīng)常會(huì)給咱們造成很多麻煩,例如部分信號期望為0,但是仿真結(jié)果顯示為X態(tài)。...
2023-09-20 標(biāo)簽:寄存器IC設(shè)計(jì)RTL中斷處理 1343

Type-C接口后,iPhone15的充電速度有沒有提升?
據(jù)充電頭網(wǎng)的最新消息,iPhone 15系列的Type-C接口完全可以兼容其他設(shè)備的線材,安卓手機(jī)也能通用,沒有任何加密措施。...
2023-09-20 標(biāo)簽:蘋果安卓系統(tǒng)USB-Ciphone15 4366

比亞迪新能源汽車內(nèi)部電驅(qū)系統(tǒng)拆解原理
電池包的BMS采用分布式架構(gòu),包括一個(gè)中央控制器(CECU,電池包外)和3個(gè)局部控制器(LECU,電池包內(nèi)),其中CECU采用飛思卡爾MC9S12XET256MAA(HCS12系列),其主要作用是實(shí)施監(jiān)測電池狀態(tài)(SOC、溫度、S...
2023-09-20 標(biāo)簽:芯片新能源汽車比亞迪電池系統(tǒng)電池?zé)峁芾?/a> 2792
RUCKUS AP R850表現(xiàn)如何?
RUCKUS R850是我們?nèi)萘孔罡叩碾p頻雙并發(fā)Wi-Fi 6接入點(diǎn) (AP),支持12個(gè)空間流(5GHz 8x8:8,2.4GHz 4x4:4)。R850具有OFDMA、TWT和MU-MIMO功能,能夠有效管理多達(dá)1,024個(gè)客戶端連接,可以提高容量,提高超高密...
2023-09-20 標(biāo)簽:以太網(wǎng)OFDMA系統(tǒng)無線電信號MIMO天線Wi-Fi模塊 2182
思爾芯EDA解決方案加速多領(lǐng)域芯片設(shè)計(jì)
9月18日,首屆IDAS設(shè)計(jì)自動(dòng)化產(chǎn)業(yè)峰會(huì)在武漢中國光谷科技會(huì)展中心隆重開幕。...
2023-09-20 標(biāo)簽:SoC設(shè)計(jì)TCLEDA芯片PCIe接口GPU芯片 1442
帝奧微DIO36812填補(bǔ)國內(nèi)低電壓/超低功耗USB 3.2 Gen1 Redriver空白
1996 年提出USB1.0時(shí),USB接口的數(shù)據(jù)速率僅為1.5Mbps。隨著USB協(xié)議的更新迭代,USB已經(jīng)發(fā)展到USB4.0,且USB接口數(shù)據(jù)速率已增至驚人的40Gbps。 在如此高的數(shù)據(jù)速率下,通過當(dāng)今設(shè)備中常用的傳輸介質(zhì)...
2023-09-20 標(biāo)簽:接口usb低電壓數(shù)據(jù)速率帝奧微電子 2532

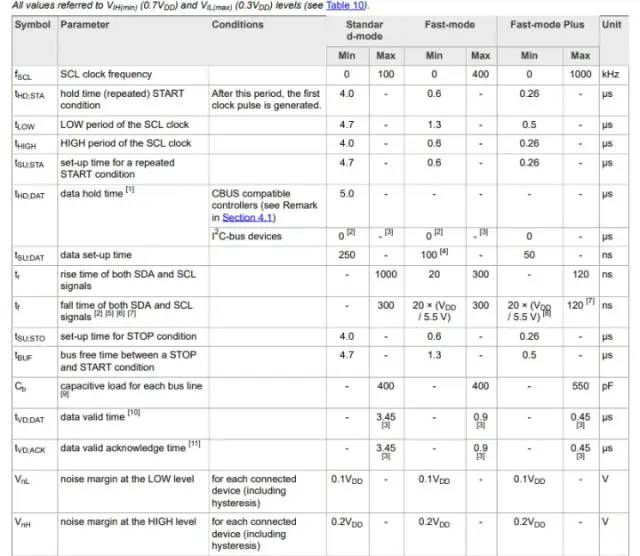
I2C讀寫EEPROM基礎(chǔ)原理介紹
真正實(shí)際做過項(xiàng)目的人都知道,好的底層驅(qū)動(dòng),會(huì)給上層應(yīng)用開發(fā)帶來很大便利,節(jié)省開發(fā)時(shí)間,以及減少bug發(fā)生率。...
2023-09-20 標(biāo)簽:操作系統(tǒng)STM32EEPROMI2C驅(qū)動(dòng)代碼 1204
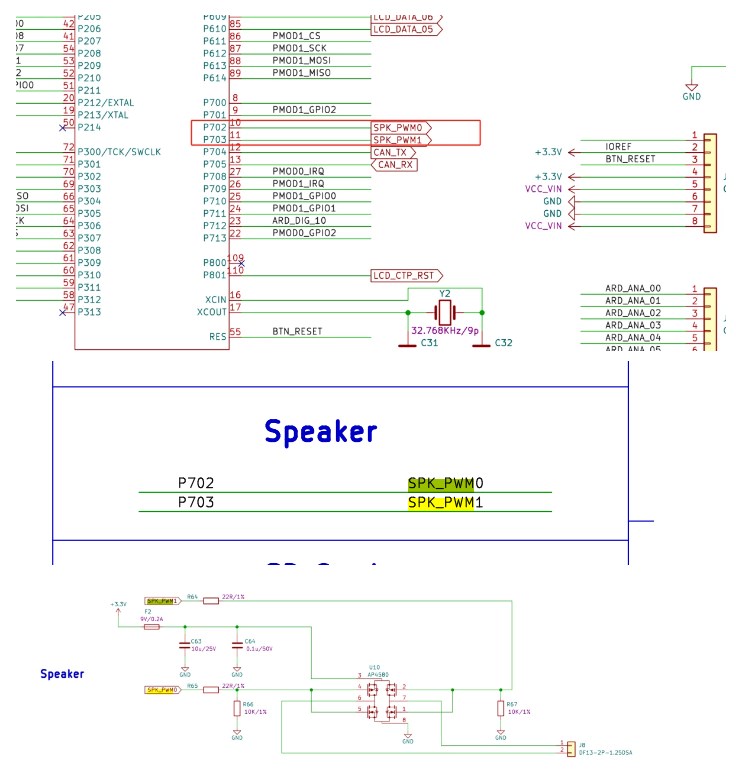
分享幾種先楫半導(dǎo)體電機(jī)控制應(yīng)用方案
豐富的編碼器接口和協(xié)議,可以統(tǒng)一編碼器平臺(tái),如磁編、光編和旋變等...
2023-09-20 標(biāo)簽:電機(jī)控制編碼器plc微型逆變器伺服驅(qū)動(dòng)器 1712
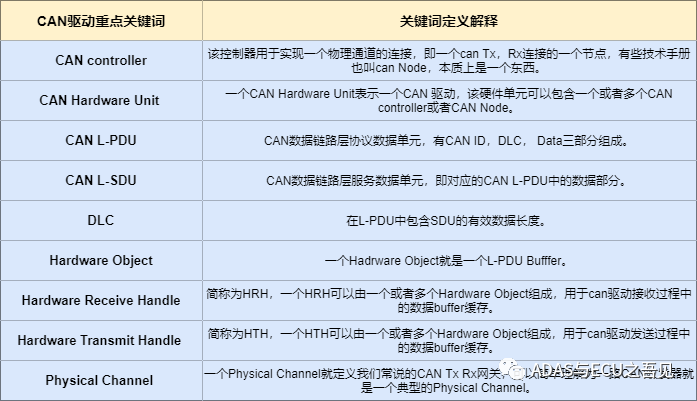
CAN驅(qū)動(dòng)Mailbox配置過程中有哪些關(guān)鍵配置參數(shù)值得我們注意?
CAN驅(qū)動(dòng)作為一個(gè)在日常開發(fā)項(xiàng)目中經(jīng)常接觸到的重要驅(qū)動(dòng)模塊,AUTOSAR組織對CAN Driver有著十分全面而準(zhǔn)確的實(shí)現(xiàn)要求與相關(guān)關(guān)鍵詞參數(shù)的定義。...
2023-09-20 標(biāo)簽:控制器接收機(jī)AUTOSARCAN驅(qū)動(dòng)FIFO存儲(chǔ) 3989

用于模擬肺泡呼吸過程的仿生肺泡器官芯片
呼吸系統(tǒng)與外界環(huán)境直接相通,因此,空氣中的病原體或者細(xì)菌極易引起疾病,并且在大規(guī)模范圍內(nèi)傳播。...
2023-09-20 標(biāo)簽:驅(qū)動(dòng)器PCL 3832
怎樣使用Verilator進(jìn)行Verilog Lint呢?
FPGA設(shè)計(jì)是無情的,所以我們需要利用能獲得的任何軟件進(jìn)行檢查...
2023-09-20 標(biāo)簽:FPGA設(shè)計(jì)仿真器SDL靜態(tài)分析macOS系統(tǒng) 3899

什么是舵機(jī)?舵機(jī)的種類有哪些?目前舵機(jī)的主要使用場景
舵機(jī)的概念、種類以及能夠應(yīng)用的場景...
2023-09-19 標(biāo)簽:電機(jī)舵機(jī)伺服舵機(jī)數(shù)字舵機(jī) 16506















編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)