usb3.0和usb3.1的區別有哪些
USB 3.1 Gen2是最新的USB規范,該規范由英特爾等公司發起。數據傳輸速度提升可至速度10Gbps。與USB 3.0(即USB3.1 Gen1)技術相比,新USB技術使用一個更高效的數據編碼系統,并提供一倍以上的有效...

通過SPI總線實現數據讀取的多路數據采集系統設計
圖3為AD7891的串行寫操作時序圖,從圖3中可以看出,當單片機向AD7591中寫數據時,必須先將置低,AD7891的控制寄存器只接收前6位數據,前三位A0、A1、A2用于配置AD采樣通道,在接收完前6位數據之...
usb3.0 u盤寫入速度一般是多少?
USB 3.0是一種USB規范,該規范由英特爾等公司發起。USB3.0也被認為是SuperSpeedUSB——為那些與PC或音頻/高頻設備相連接的各種設備提供了一個標準接口。只是個硬件設備,計算機內只有安裝USB3.0相...
在電流、電壓變送器中CAN總線技術有什么應用?
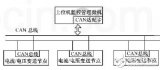
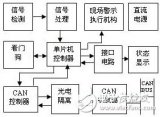
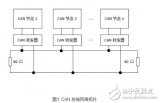
現場CAN智能變送節點以微控制器為核心,配有CAN通信接口,其主要功能是采集各現場設備的實時數據,并通過CAN總線將采集的數據交送給監控站,供監控站獲得采集數據的基本信息,從而進行數...
什么是PXI總線?怎樣設計一個基于PXI總線的導彈瞄準設備虛擬計量檢定系統?
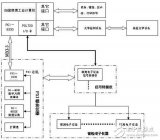
電子檢測設備主要由PXI模塊儀器、PCL720數字I/O模塊、信號轉接儀和其它附件、電纜組成,其中PXI模塊儀器包括PXI-1002機箱、MXI-3控制套件和PXI-6052E多功能數據采集模塊,NI-4060數字萬用表模塊。...
萬用表測量診斷CAN總線方法
CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由以研發和生產汽車電子產品著稱的德國BOSCH公司開發的,并最終成為國際標準(ISO 11898),是國際上應用最廣泛的現場總線之一。...
CAN總線要如何匹配終端電阻?
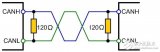
終端電阻,是一種電子信息在傳輸過程中遇到的阻礙。高頻信號傳輸時,信號波長相對傳輸線較短,信號在傳輸線終端會形成反射波,干擾原信號,所以需要在傳輸線末端加終端電阻,使信號到...

CAN總線技術有什么特點?在高壓開關柜在線檢測系統中有什么應用?
本文采用了目前在測控系統中常用的控制器局域網絡CAN。CAN 總線采用差分驅動,可適用于高噪聲干擾的環境且具有較強的糾錯能力,目前已形成國際標準ISO11898規范[1]。其價格低廉,可靠性...

什么是SPI、I2C、UART?它們有什么特點?有什么區別?
SPI總線由三條信號線組成:串行時鐘(SCLK)、串行數據輸出(SDO)、串行數據輸入(SDI)。SPI總線可以實現 多個SPI設備互相連接。提供SPI串行時鐘的SPI設備為SPI主機或主設備(Master),其他設...
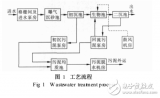
基于現場總線的SCADA系統在污水處理廠的應用
SCADA系統自誕生之日起就與計算機技術的發展緊密相關。sCADA系統發展到今天已經經歷了三代。基于分布式計算機網絡以及關系數據庫技術的能夠實現大范圍聯網的EMS/SCADA系統稱為第三代。這一...

在大型設備遠程監測監控系統中現場總線技術有什么應用?
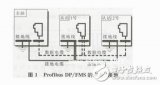
Modbus通訊協議由Modican公司開發,是當今主流現場總線協議之一。通過它,集控設備相互之間、集控設備經由網絡和其它設備之間可以通訊;通過它,不同廠商生產的控制設備可以連成工業控制...

汽車網絡系統總線節點的硬件和通信程序設計
一個報文幀由一個幀頭(由主機任務模塊提供)和一個響應幀(由從機任務模塊提供)組成。幀頭包括一個同步間隔場(SYNCH BREAK FIELD)、 一個同步場(SYNCH FIELD)和一個標識符場。報文幀的用...
怎樣設計一個基于CAN總線的分布式安全檢測控制系統?
系統信號產生電路采用CD4069外接電阻電容構成充放電通路產生方波脈沖信號。電路振蕩通過電容C充放電利用正反饋原理來完成,電路中R2是補償電阻,用于改善電源電壓變化而引起的震蕩頻率不...
CAN總線的概念是什么?CAN總線通信有什么解密方法?
CAN(控制器區域網絡)總線是一種在汽車和工業機械中使用的串行協議,允許微控制器相互通訊。該標準最初由 Robert Bosch GmbH 于 1983 年制定。它使用雙絞線上傳輸差分信號,分別為CAN高(CAN ...
2018-07-23 標簽:電平 17810
通過EMIF接口控制各種芯片的復雜系統設計實現
TMS320C6722 型DSP的EMIF接口設計初衷是與外部擴展存儲器連接,EMIF接口有兩種工作方式:SDRAM工作模式與異步工作模式。SDRAM工作模式是專為SDRAM設計的同步工作模式,EMIF接口能自動給SDRAM進行刷新...
CNC動態卡是怎樣以總線方式實現的?
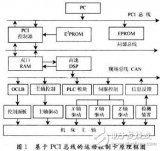
基于pci總線的動態控制器采用現場總線技術,解決了傳統串行總線傳輸速率低,響應速度慢,出錯率高等缺點,同時由于現場總線采用數字信號而不是傳統的模擬信號作為通信手段,解決了傳統...
基于VXI總線的任意數字信號發生器是如何設計實現的?
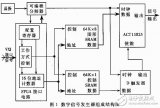
數字信號發生器采用VXI總線測試平臺,有8路獨立的輸出信號,均可預先存儲在容量為64K的靜態存儲器中,可以獨立地編輯各種輸出信號;時鐘頻率最高可達40MHz;輸出信號支持高電平、低電平和...
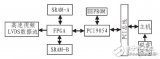
怎樣設計實現一個基于DSP和PCI總線的通信數據采集系統?
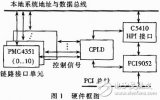
本系統的設計難點主要是如何實現DSP與PCI9052之間高效率的數據通信。在系統中PCI9052通過DSP上專門的高速主機通用接口(host port interface,以下簡稱HPI口)和DSP進行通信。但是HPI口總線是一個非常...
SPI總線有什么特點?工作方式是什么?有哪些錯誤?
目前的項目中使用了SPI總線接口的FLASH存儲器存儲圖像數據。FLASH的SPI總線頻率高達66M,但MCU的頻率較低,晶振頻率7.3728M,SPI最大頻率為主頻1/2。對于320*240*16的圖像讀取時間為333ms,而且還忽略...
2018-07-12 標簽:SPI總線 4044
如何利用PCI總線設計一個數據轉換模塊?
項目開發中選擇的是Numega公司的Driverstudio驅動程序開發工具包,它是建立在Windows Driver Development Kit之上的驅動程序開發工具,包含了VtoolsD、DriverWorks、DriverNetWorks和SoftICE等開發工具。DriverWorks用...
2018-07-12 標簽:pci總線 2117
SPI4.2總線的原理是什么?怎樣進行調試?
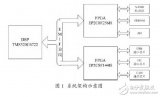
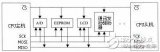
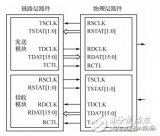
SPI4.2總線是一種芯片間的互連總線,連接芯片的鏈路層和物理層模塊。其工作時鐘是源同步雙邊沿觸發時鐘,至少為311 MHz。圖1是使用SPI4.2總線連接兩個芯片的示意圖。可見,SPI4.2總線的信號在...
2018-07-12 標簽:SPI總線 4083

總線技術在LED控制系統中有什么應用?
網絡傳輸控制是系統的核心, 主要實現數據分級傳輸, 具有擴大通信距離, 增加所帶彩燈節點數目等功能。使用CAN 總線與RS485總線分級網絡傳輸具有傳輸速度快、自動解決總線競爭、實時性好...

怎樣設計一個基于SPI總線技術的同步422接口?
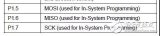
MISO信號由從機在主機的控制下產生。信號用于禁止或使能外設的收發功能。為高電平時,禁止外設接收和發送數據;為低電平時,允許外設接收和發送數據。圖1所示是微處理器通過SPI與外設連...

什么是總線?它有什么特性?
總線,是電腦中傳輸數據的公共通道,就像馬路有四車道、六車道、八車道一樣,總線是分為位的,目前電腦的總線位數有16位、32位、64位等。位數越大,傳輸數據越多、越快。386DX電腦是32位...
2018-07-11 標簽:總線 19033
CAN總線是什么?CAN總線數據鏈路層又是什么?
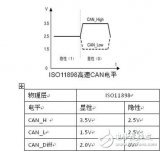
CAN 總線的物理連接只需要兩根線,常稱為 CAN_H 和 CAN_L,通過差分信號進行數據的傳輸。CAN 總線有兩種電平,分別為 隱性電平 和 顯性電平,這兩種電平有著類似漏極 I/O 電平信號之間“與”的...
什么是CAN總線協議?有哪些應用領域?
現在的汽車已經不再僅僅是一種死氣沉沉的交通工具了。計算機的發明也讓汽車有了一個職能的心。跟中嵌入式的計算機核心應用到汽車當中。那么如何規范這個核心的工作呢?這就需要CAN總線...
2018-07-11 標簽:CAN總線 13018
現場總線控制系統屏蔽有哪些方法?接地方法有哪些?
電纜屏蔽層兩端接地是針對相互絕緣隔離型的雙層屏蔽電纜(無絕緣隔離的雙屏蔽層,其實質仍然是單屏蔽層),雙層屏蔽電纜的最外屏蔽層兩端接地。電纜屏蔽層兩端接地適用于外部有強電流...
什么是RS485接口?特點是什么?
1. RS-485的電氣特性:采用差分信號負邏輯,邏輯“1”以兩線間的電壓差為+(2~6)V表示;邏輯”0“以兩線間的電壓差為-(2~6)V表示。接口信號電平比RS-232-C降低了,就不易損壞接口電路的芯片,...
2018-07-11 標簽:接口 56122
投影機有哪些接口?各自有什么用?
投影機接口主要有輸入接口、輸出接口和控制接口三部分組成,但并非所有投影機都擁有這三部分,有部分低端娛樂投影機僅具備輸入接口,為了更好的控制成本,省去家庭娛樂用戶不常見的輸...















編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |



 工商網監
工商網監