在如今CAN總線應用越來越廣泛的今天,很多人都開始學習使用這一技術,但是由于CAN總線協議的復雜度,不少IT新人只能淺嘗輒止。本文將介紹如何致遠電子的嵌入式UART轉CAN模塊來解決這一問題。
2016-12-15 14:13:37 6351
6351 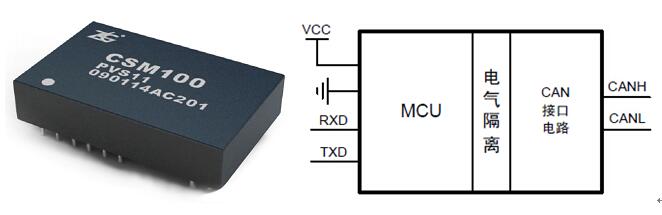
MCS-51單片機組成CAN通信系統需要擴展CAN控制器,本系統采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:007026 
各位工程師是否遇到需要使用到CAN通信但缺少CAN接口的情況?最簡便的方案是采用UART轉CAN通訊。ZLG致遠電子針對此應用CSM100系列模塊解決方案,這款模塊將極大的簡化了開發流程,實現的方式是怎樣的?本文為你詳解。
2018-12-05 16:55:2635945 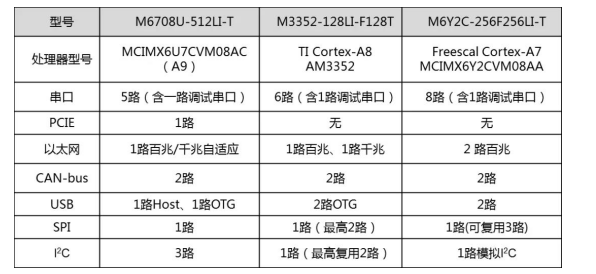
CAN通信矩陣(CAN Communication Matrix)通常由整車廠完成定義,車輛網絡中的各個節點需要遵循該通訊矩陣才能完成信息的交互和共享。
2022-09-08 09:57:342757 UART(Universal Asynchronous Receiver/Transmitter,通用異步收發器)是一種雙向、串行、異步的通信總線,僅用一根數據接收線和一根數據發送線就能實現全雙工通信。
2022-09-15 14:18:531662 UART(Universal Asynchronous Receiver Transmitter)通用異步收發器,是一種通用串行、異步通信總線,該總線有兩條數據線和一條地線,支持全雙工異步通信。常用于單片機與單片機或外圍輔助設備之間的通信。
2023-09-21 17:28:452852 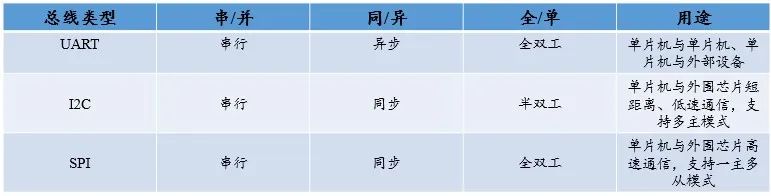
UART(UniversalAsynchronousReceiver/Transmitter,通用異步收發器)是一種常用的串行通信協議,廣泛應用于單片機或各種嵌入式設備之間的通信。本文將詳細介紹
2023-09-22 08:22:354114 
波特率表示每秒鐘傳送的碼元符號的個數,它是對符號傳輸速率的一種度量。在UART通信中,波特率用于描述通信速度,其單位是bps(每秒鐘傳輸的bit的數量)。
2024-02-19 16:19:051715 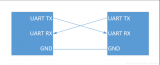
今天我們分享的是關于UART串口通信示例,歡迎大家探討
2024-11-05 11:56:394464 
我正在嘗試通過 CAN 和 UART 與計算機通信。代碼在附件和下面。我想知道為什么我會出現圖片中的情況#include "Cpu.h" #include
2023-03-17 08:46:09
這篇測試下CAN通信的收發測試,代碼使用庫例程中修改。硬件部分測試用到了CAN0、串口0和定時器1。1> CAN0使用的接口2> 串口0使用的接口本計劃使用PA9
2022-12-29 16:19:20
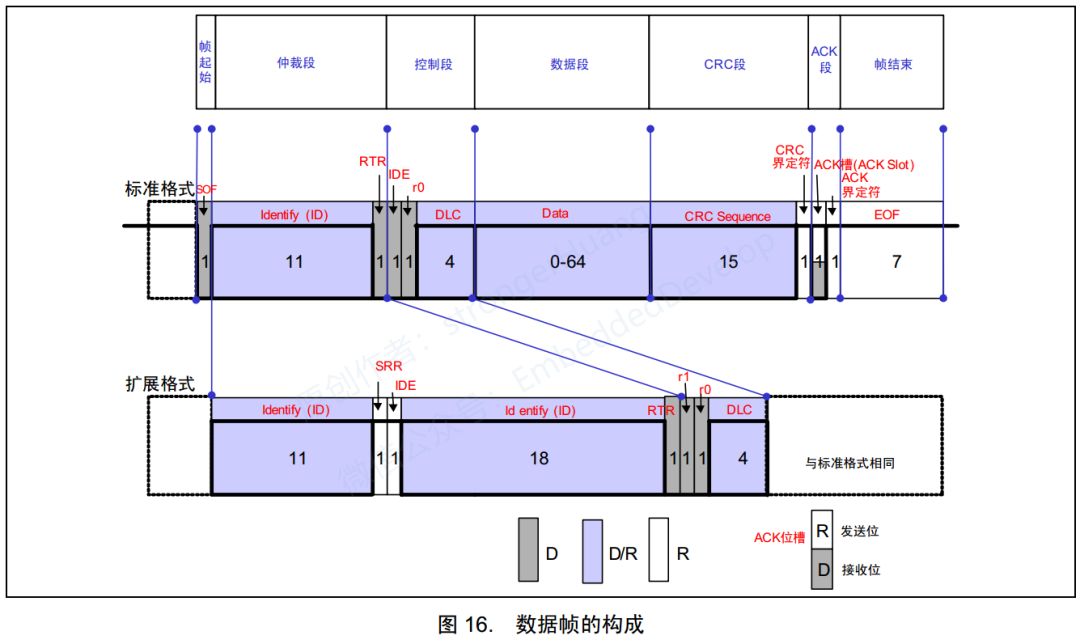
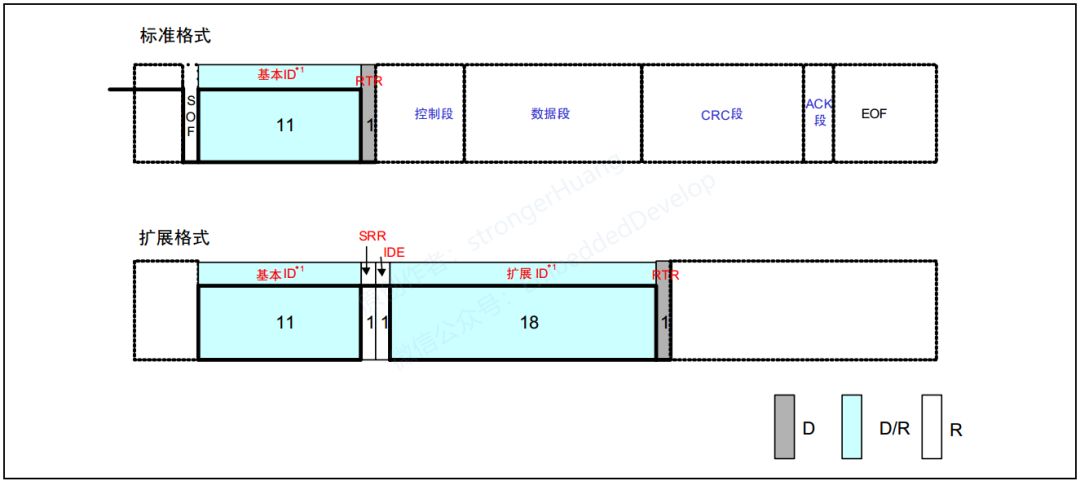
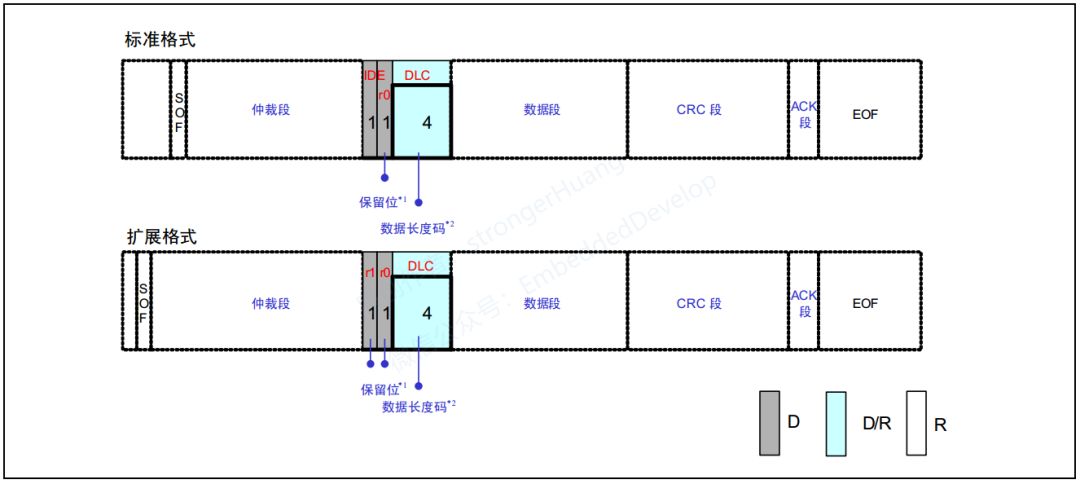
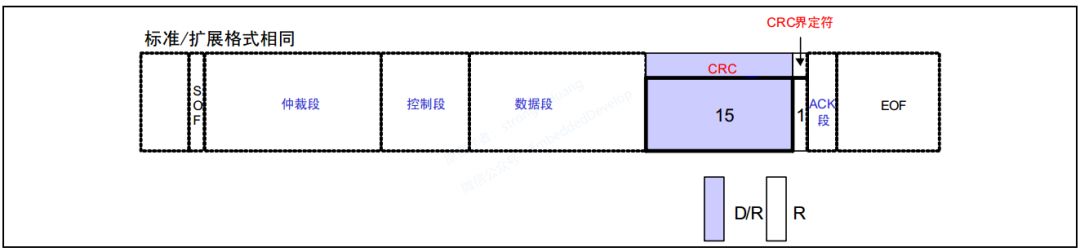
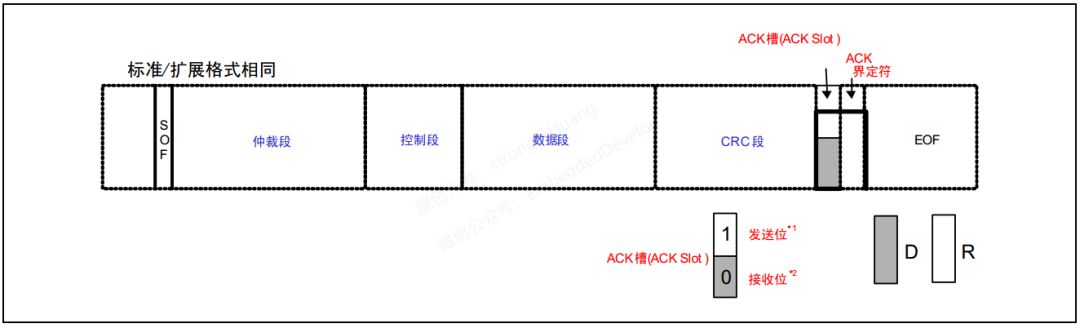
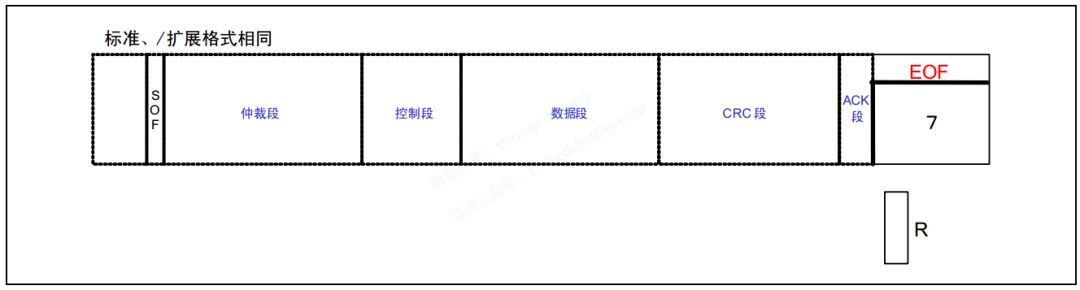
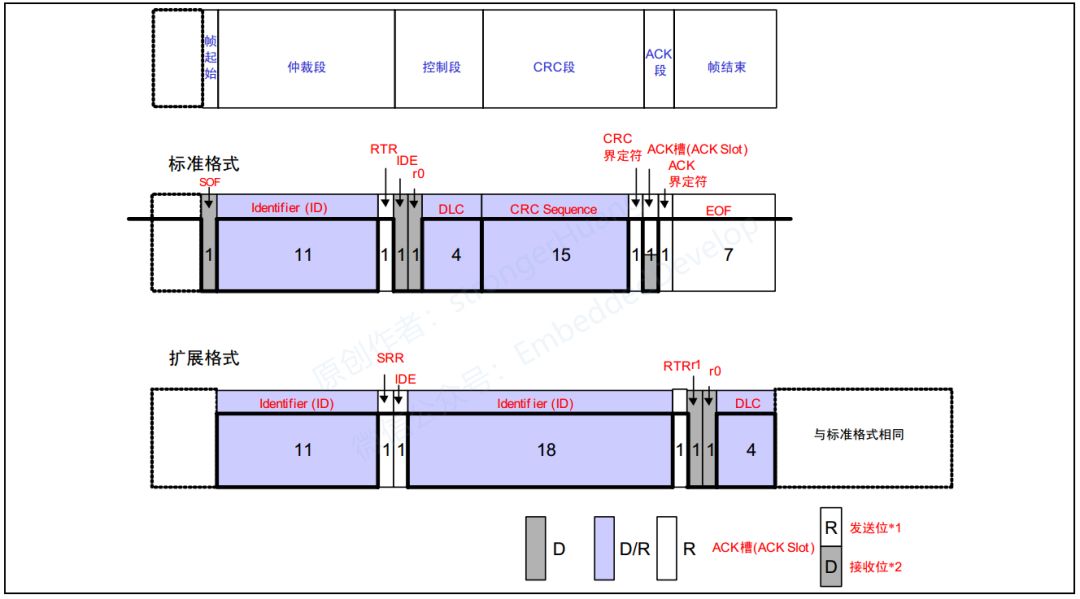
看過一些資料還是不太理解這個CAN通信,CAN通信的原理是什么?尤其是CAN的分類和數據結構,CAN分為標準幀和擴展幀,對于這兩個幀的具體含義是什么?
在變頻器上擴展CAN通信卡,有什么CAN通信軟件推薦,我可以在軟件上直接發送幀控制變頻器?
2024-03-23 22:49:07
常見問題分析。CAN總線和UART、I2C、SPI總線最大的區別主要在于取消了傳統的地址編碼方式,理論上講總線上的互聯節點數不受限制,擁有強大的握手與出錯管理及重發機制,具有很強的抗干擾能力。STM32 CAN 基礎內容CAN網絡中主要由CAN控制器和CAN收發器組成,大部分STM32內部都集成了C
2021-08-19 07:41:06
最近測試中在整車加入一塊傳感器通信的板子,結果加上去就無法通信,開始一直以為是程序問題,后來直接debug單片機程序。發現CAN的發送程序已經執行,可是總線上沒有信號。最后發現是硬件問題,匹配
2021-08-20 08:12:42
目錄前置基本操作UARTCAN最后效果展示HAL庫的封裝相當方便,基本上所有的外設的操作都大同小異,這里我們以UART和CAN為例。移植是從F407移植到F427IIHx上。前置基本操作打開魔法棒
2021-12-13 06:24:56
1 UART 發展歷史 2、兩個 UART 是否直接通信 ? 3 、UART的不同模塊有何作用? 4 、UART、RS232、RS485 在串口通信中,主要區別是什么 5、UART優缺點是什么?
2021-03-11 07:36:43
你好!當我使用UART進行交流時,我發現使用UART有一些困難。當我調試固件時,Uart通信是不敏感的。換句話說,當我通過步進調試時,有時它可以工作,但有時它不能工作。我不知道為什么。我希望你能幫助
2019-02-19 14:22:05
PSOC3 Bootloader編程支持通過I2C、SPI、UART、USB等接口!這個引導加載程序可以通過CAN通信程序支持編程嗎???? 以上來自于百度翻譯 以下為原文PSOC3
2019-01-29 13:30:16
本帖最后由 alan7lanshui 于 2018-3-16 18:02 編輯
stm32板子,斷電重啟之后,無法進行CAN通信,只有在第一次寫入程序時,可以進行CAN通信,這是
2018-08-19 06:26:26
該系統的硬件構成、芯片選擇和組成原理, 對FPGA的控制程序進行了分析和設計; 實驗結果表明, 系統完全滿足CAN總線通信要求, 與以往基于單片機的CAN總線通信系統相比較, 降低了體積、重量和功耗, 具有優越性; 該設計已成功應用于星載電場儀的地面檢測設備中。
2012-08-11 11:55:19
基于STM32F429HAL庫的CAN通信代碼* 最近在學正點原子阿波羅STM32F429開發板的CAN通信章節,例程里只提供了查詢方式實現的CAN通信實驗。昨天又復習了一遍UART串口實驗的中斷
2022-02-08 07:00:40
想用TI的AM335*系列做一個設計,需要4個485口、4個CAN口。看到DS上,最多6個UART口,2個CAN口。這樣,可以將6個UART中的4個轉換為485口。而剩下了2個UART口,如何轉換
2012-10-09 20:52:24
想用TI的AM335*系列做一個設計,需要4個485口、4個CAN口。看到DS上,最多6個UART口,2個CAN口。這樣,可以將6個UART中的4個轉換為485口。而剩下了2個UART口,如何轉換
2012-10-09 20:53:45
open stack 進行通信,另一方面我們使用 UART1 進行操作。我們面臨的問題是,當 UART1/LPUART1 與 CAN 傳輸并行運行時,會出現 CAN 傳輸錯誤。這導致
2022-12-12 08:29:48
本設計為光電穩定跟蹤平臺開發CAN 驅動,以實現CAN 總線上設備間的通信。分析了linux 下標準設備驅動機制和CAN 總線通信模型,給出了光電穩定跟蹤平臺中CAN 總線通信的硬件設計
2009-08-04 08:33:48 30
30 嵌入式UART轉CAN模塊系列產品選型
CSM100系列嵌入式UART轉CAN芯片可以幫助用戶快速實現具有CAN-BUS通訊接口的儀器、儀表設備的項目設計。
2010-04-02 13:29:4732 CSM100系列Data Sheet嵌入式CAN轉UART模塊
CSM100系列UART轉CAN 模塊是集成微處理器、CAN-bus控制器、CAN-bus收發器、DC
2010-04-20 18:22:4931 嵌入式CAN轉UART模塊 CSM100系列產品手冊
CSM100系列UART轉CAN 模塊是集成微處理器、CAN-bus控制器、CAN-bus收發器、DC-DC轉換、高速光電隔離于一體的嵌入式CAN轉UART模
2010-04-22 09:07:3747 文章介紹了一種在現場可編程門陣列(FPGA)上實現UART 的方法。首先闡述了UART 異步串行通信原理,然后介紹了實現UART異步串行通信的硬件接口電路及各部分硬件模塊,以及用硬件
2010-08-06 16:24:1355 摘要:介紹CAN總線及其通信協議J1939,并設計基于CAN總線的多ECN通信平臺的硬件結構;闡述節點ECN通信的軟件設計方法,在仿真試驗的條件下實現數
2006-03-11 13:21:032063 
CAN總線通信電路
2008-10-14 13:59:176881 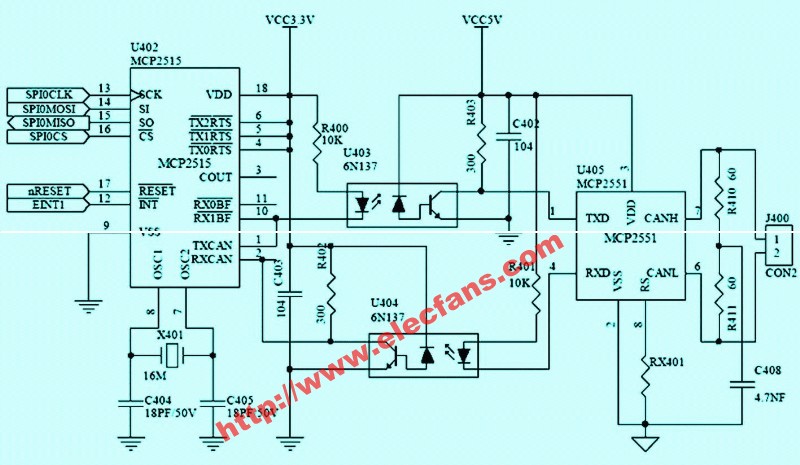
針對UART通信端口上射頻干擾的研究
有客戶報告其中心位于840MHz左右的RF干擾影響配置成UART的串行通信端口,該接口位于包含一個AD6903(LeMansLCR+)數字
2010-04-20 16:54:421513 
設計了多個CAN總線的通信節點,通過PCI9810-CAN適配卡上的CAN總線,組成一個局域通信網絡,實現了PC機對各個節點的監控和通信以及節點間的自由通信。
2011-10-19 14:57:5668 針對大數據量的串口間通信,在常規的UART串行數據通信的基礎上,結合Cortex-M3微控制器中DMA控制器的作用,實現DMA控制的UART串口數據包收發。設計鏈表項緩存,最終實現DMA的分散/聚集
2012-04-20 10:54:0746 基于CAN總線系統結構構成,通過工程實踐的具體應用以及對CAN控制器及收發器硬件結構的深入理解,并從通信的角度出發著重深入分析了CAN總線通信的節點同步機制、總線地址機制、總
2012-05-08 15:23:04404 CAN總線通信詳解。
2016-03-30 16:46:100 CAN通信實驗。
2016-03-30 16:48:000 niosii的UART串口通信niosii的UART串口通信。
2016-04-06 17:03:271 基于FPGA的CAN總線通信系統,下來看看。
2016-05-10 11:47:1337 在CPLD中用UART邏輯實現高速異步串行通信
2017-01-24 16:54:2412 r7f0c802-單線UART通信
2017-09-01 14:44:5231 AVR914 CAN UART based Bootloader for AT90CAN32_AT90CAN64_AT90CAN128
2017-09-21 13:17:4719 UART通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART,是一種異步收發傳輸器,是電腦硬件的一部分。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片
2017-11-08 18:40:1117042 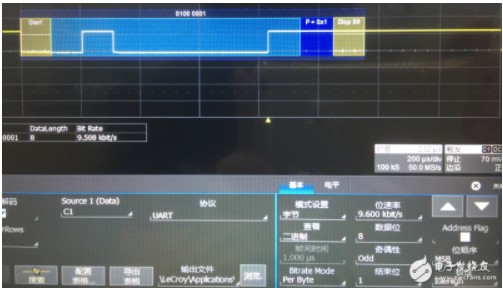
uart通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART,是一種異步收發傳輸器,是電腦硬件的一部分。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片
2017-11-09 08:52:0820198 
UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可以實現全雙工傳輸和接收。在嵌入式設計中,UART用來主機與輔助設備通信,如汽車音響與外接AP之間的通信,與PC機通信包括與監控調試器和其它器件,如EEPROM通信。
2017-11-20 15:56:4428626 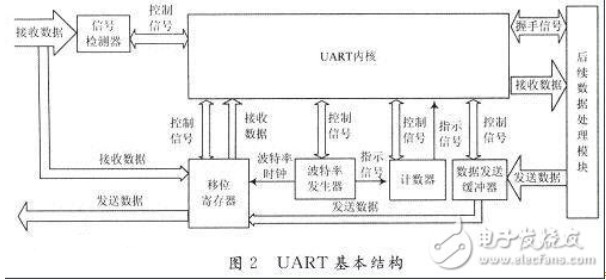
基于51單片機的UART串口通信詳解。
2017-11-21 10:14:4564126 
通用異步收發傳輸器通常稱作UART,是一種異步收發傳輸器,是電腦硬件的一部分。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連結上。
2017-12-06 14:01:5341333 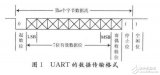
UART是用于控制計算機與串行設備的芯片。有一點要注意的是,它提供了數據終端設備接口,這樣計算機就可以和調制解調器或其它使用RS-232C接口的串行設備通信了。作為接口的一部分,UART還提供以下功能:
2017-12-21 16:27:236492 本文首先介紹了關于單片機串口通信的幾種方式,其次介紹了兩個單片機之間UART串口通信,最后闡述了單片機之間UART通信示意圖。
2018-04-11 16:04:0818195 單片機通信uart和modbus有什么區別,modbus是一個應用層的協議,他是構建在串口,網線等底層傳輸基礎上的。uart只是串口協議而已。
2018-04-11 17:02:0021566 CAN總線通信是目前汽車電子和工業現場的主流通信,CAN總線憑其穩定性、時效性、抗干擾性、傳輸距離遠及低成本等特點,占領總線巔峰,但是隨著越來越多的電子產品的誕生,再加上工業現場等干擾,即使是CAN
2018-05-07 17:09:358383 GCAN-601模塊是嵌入式單片機UART串口轉CAN模塊,可實現將UART串行數據與CAN數據之間相互轉換。搭載GCAN-601模塊,用戶無需精通單片機CAN總線編程,只需使用UART串行接口即可擴展出CAN總線,從而快速接入CAN總線網絡。
2018-10-31 16:00:0622671 UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可以實現全雙工傳輸和接收。在嵌入式設計中,UART用于主機與輔助設備通信,如汽車音響與外接AP之間的通信,與PC機通信包括與監控調試器和其它器件,如EEPROM通信。 [1]
2019-11-22 07:04:0014207 微控制器通信 - 什么是UART?
2019-07-31 17:12:0312649 
USB傳輸協議比UART協議有更高的性能,但電路復雜開發難度大,并且大多數的微處理器只集成了UART,因此UART仍然是目前數字系統之間進行串行通信的主要協議。
2019-09-03 09:01:103076 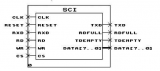
CSM300(A)系列隔離 SPI / UART 轉 CAN 模塊是集成微處理器、CAN 收發器、DC-DC 隔離電源、信號隔離于一體的通信模塊,當用戶控制板上的 CAN 控制器資源不夠時,可以通過
2020-04-02 08:00:009 通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連接上。
2020-11-29 11:12:353212 本文檔的主要內容詳細介紹的是UART通信轉CAN通信配置軟件。
2021-03-01 08:00:0040 CAN總線通信協議詳細如下。
2021-04-19 16:54:3879 UART串口通信 串行通信是將數據按位發送的通信機制。比如:101010100,用0-0-1-0-1-0-1-0-1來發送,每次只發一位,所以速度是比較慢的。而UART串口通信則是串行通信的一種
2021-11-10 21:06:0319 CAN入門書之中文版CAN通信協議
2021-11-18 16:36:310 的系統。串行口通信就被發明出來,下面來了解串行口通信(uart)。幾個概念為了能更好理解串行口通信,在介紹它之前,先來看看幾個概念,補充知識,方便深入明白uart工作原理。通信方式通信方式有兩...
2021-11-26 11:51:059 C51的UART 串口通信
2021-11-29 12:21:0411 一、前言1、簡介 寫的這篇博客,是為了簡單講解一下UART通信協議,以及UART能夠實現的一些功能,還有有關使用STM32CubeMX來配置芯片的一些操作,在后面我會以我使用的STM32F429
2021-11-30 14:36:0622 說明:其端口和can需要設置波特率:250/500,和can的類型,can1/can2串口直接和模擬量通信需要設置串口的信息,如下圖:藍牙和模擬量通信,不需要任何設置目前主流的是藍牙和can通信,這個時候就需要藍牙設置一下波特率和can類型了。...
2021-11-30 19:36:0410 串行通信/并行通信和UART、SPI、I2C、USB以及TTL、RS-232、RS-485區別詳細整理串行通信/并行通信和UART口/USB口以及TTL、RS-232、RS-485這些和通信相關
2021-11-30 20:51:0627 學習單片機,通信方面可以說是一大重點最近做項目需要用到can通信,這里分享一下自己的can通信學習代碼,我使用的是正點原子的精英開發板,參考的資料也是正點原子的庫函數指南,此外我也看完了can入門
2021-12-04 17:21:0446 基于STM32F429HAL庫的CAN通信代碼* 最近在學正點原子阿波羅STM32F429開發板的CAN通信章節,例程里只提供了查詢方式實現的CAN通信實驗。昨天又復習了一遍UART串口實驗的中斷
2021-12-04 19:06:0919 Can通信接口學習筆記
2021-12-08 16:36:0630 數據交換。UART與USART:UART:通用異步收發器USART:通用同步異步收發器在單片機中,名稱為UART的接口一般只能用于異步串行通訊,而名稱為USART的接口可以用于同步串行通訊和異步串行通訊。可以理解UART是USART的剪裁版,只支持異步通信。UART是全雙工異步通信,可以同時收發數據。同
2021-12-20 19:21:0918 STM32串口通信HAL庫配置中 UART_IT_xx與UART_FLAG_xx 的區別:(最后有個疑問希望路過的大佬幫忙解答一下。)UART_IT_xx剛開始疑惑的時候,發現網上都沒有
2021-12-28 19:05:502 UART串行通信模式基礎,收發,中斷
2022-01-14 10:17:357 在之前的微課堂中和大家分享過靈動MM32系列MCU的UART通信實例,在此實例的基礎上我們增加UART 9bit通信功能。UART 9bit通信的作用是第9b...
2022-01-25 19:57:544 SWM系列關于UART/CAN/PLL等時鐘相關模塊,計算波特率的方法。
2022-03-18 16:52:259466 通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter),通常稱作UART。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連接上。
2022-09-09 09:56:042557 CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協議,與485協議相似,CAN也是一種2線制,采用兩根線的電壓差進行數據傳輸的協議,隨著CAN協議的高性能
2023-03-01 14:50:004443 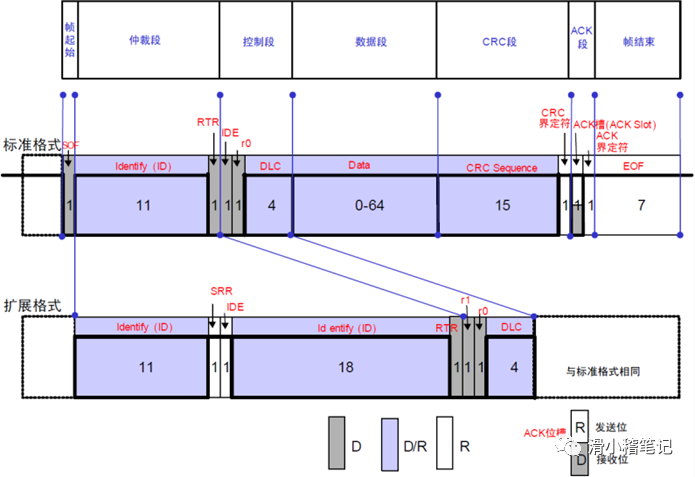
CAN與上位機通信詳細教程 提示:這里可以添加系列文章的所有文章的目錄,目錄需要自己手動添加本文使用32版HAL庫與上位機進行通信,使用按鍵按一次則發送一次數據給上位機,上位機發送一次數據給32板則
2023-05-09 14:41:4214 最近看到有網友在技術群討論關于『CAN比UART難不難的話題』,有的網友說CAN很簡單,也有的網友說CAN很難。
2023-05-20 14:38:201166 
許多協議在標準內實現安全性,并且是任何控制器的內置部分。但是,通過通用異步收發器 (UART) 連接的嵌入式設備不受保護。UART 是設備之間簡單的數字通信接口之一。這是一種無 ACK 通信協議,如果波特率已知,任何設備都可以讀取它。
2023-06-24 17:36:001328 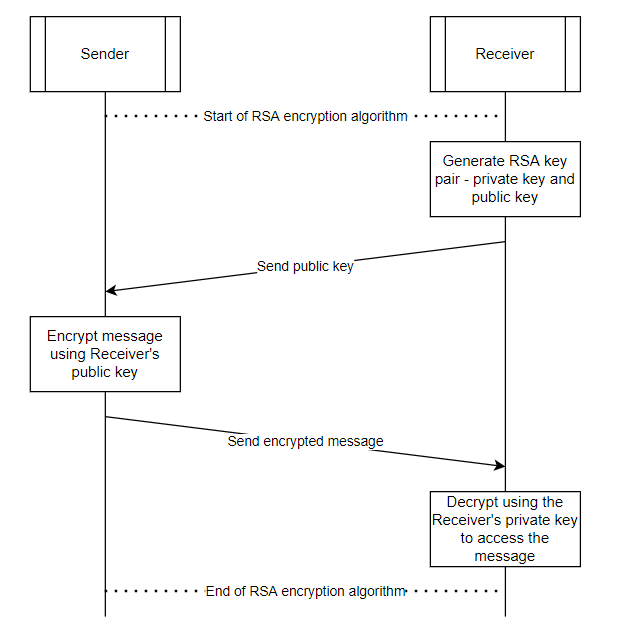
點擊上方 藍字 關注我們 摘要:以FPGA 代替傳統的單片機和外圍擴展芯片, 給出了CAN 總線通信節點的詳細設計方案。其中以SJA1000為CAN 總線控制器、FPGA 為主控制器, 設計實現通信
2023-06-18 11:15:014211 UART即通用異步收發器,是一種串行通信方式。數據在傳輸過程中是通過一位一位地進行傳輸來實現通信的,串行通信方式具有傳輸線少,成本底等優點,缺點是速度慢。串行通信分為兩種類型:同步通信方式和異步通信方式。
2023-06-25 17:13:522383 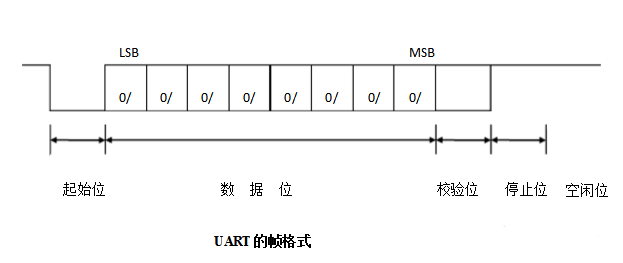
通用異步收發傳輸器,通常稱作UART,是一種異步收發傳輸器。是異步通信協議。特性:兩根線,全雙工,異步通信,速度較慢。
2023-06-28 15:26:442969 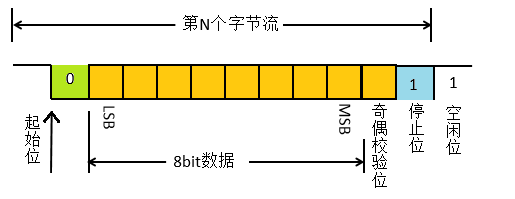
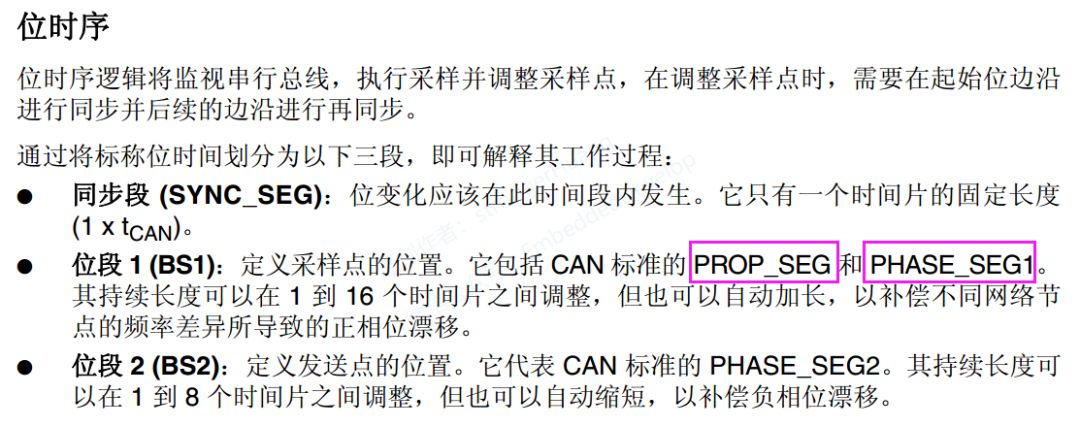
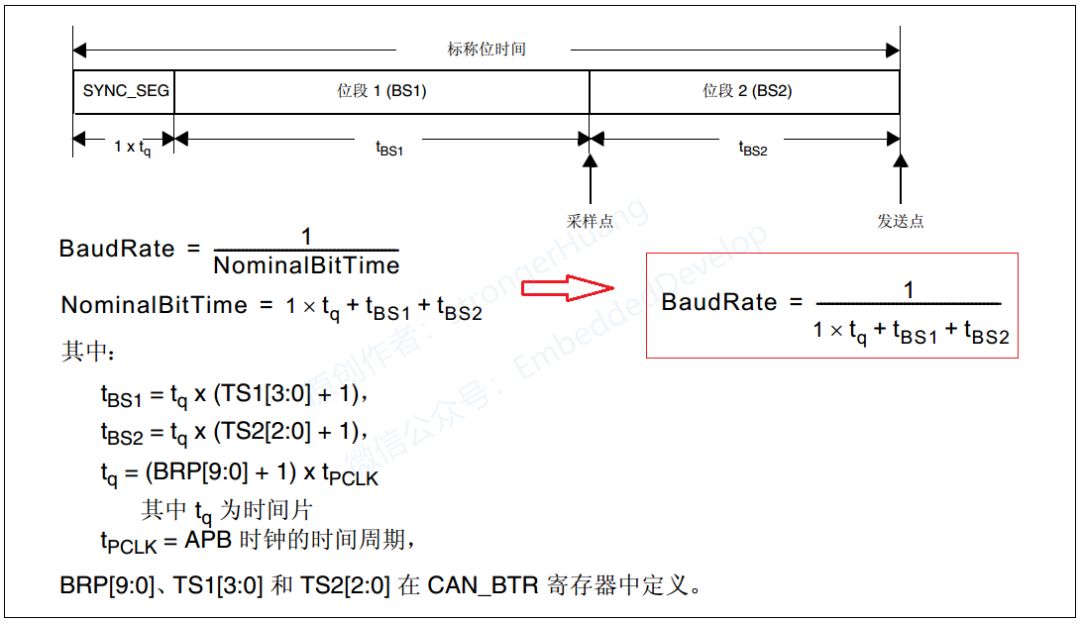
CAN總線屬于異步通信,因此就有通信波特率,而這個波特率發生器就位于CAN控制器內部。我們不需要了解它是如何產生的,但需要了解它的含義。這章節針對初學者講述以下兩點內容。
2023-10-07 10:06:191439 
CAN與CANFD的區別 CAN與CANFD如何轉換? CAN(Controller Area Network)是一種廣泛應用于汽車和工業控制系統等領域的串行通信協議,用于在不同的設備間傳輸數據。而
2023-11-22 16:37:488223 can和canfd的區別? CAN(Controller Area Network)和CAN-FD(CAN with Flexible Data-Rate)是兩種常用于數據通信的總線協議。它們都是被
2023-12-07 15:37:406444 高速can和低速can區別? 高速CAN和低速CAN是現今汽車行業中常用的兩種CAN總線通信協議。CAN,也被稱為Controller Area Network(控制器局域網絡),是一種用于在車輛中
2023-12-07 18:15:366161 容錯CAN(Controller Area Network)和高速CAN是兩種常見的汽車通信協議,它們在速度和可靠性方面有所不同。以下是關于容錯CAN和高速CAN的詳盡、詳實和細致的1500字
2024-01-05 17:58:572350 USART實際上包含了UART的功能,并增加了支持同步通信的能力。在大多數微控制器中,UART通常是USART功能的一部分,USART可以配置為UART模式進行異步通信。
2024-01-17 15:46:2123147 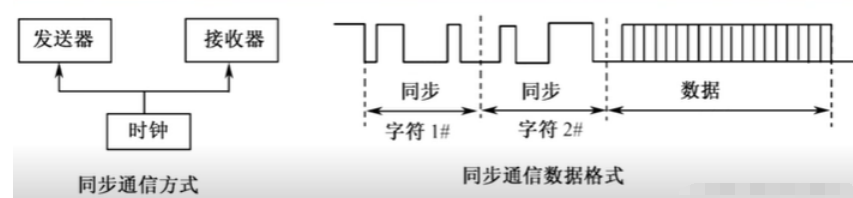
UART (Universal Asynchronous Receiver/Transmitter) 是一種通信接口協議,用于實現串口通信。它是一種簡單的、可靠的、廣泛應用的串口通信協議。它是由美國
2024-03-19 17:26:102897 CAN總線系統是現代工業自動化和汽車控制系統中常用的通信協議。在CAN總線系統中,CAN收發器和CAN控制器是兩個核心組件,它們各自扮演著不同的角色,共同確保數據的可靠傳輸。本文將詳細探討CAN收發器和CAN控制器的區別,包括定義、功能、結構、工作原理及應用等方面,以幫助讀者更好地理解這兩個組件。
2024-05-28 15:44:105496 CAN(Controller Area Network)是一種用于汽車和工業自動化領域的通信協議。它具有高可靠性、實時性和靈活性,廣泛應用于汽車、工業控制、醫療設備等領域。在實際應用中,CAN通信
2024-06-16 11:06:382935 UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)通信協議是一種常見的串行通信協議,廣泛應用于計算機、嵌入式系統、傳感器、無線通信
2024-07-25 18:07:322951 電子發燒友網站提供《CAN轉UART橋接器.pdf》資料免費下載
2024-08-28 10:39:340 CAN總線與其他串行通信協議相比,具有其獨特的特點和優勢。以下是對CAN總線與UART、I2C、SPI等常見串行通信協議的比較: 一、基本特性比較 協議名稱 引腳 雙工方式 時鐘 電平 設備應用場
2024-11-12 09:56:023045 CAN總線(Controller Area Network)是一種多主控制的串行通信協議,廣泛應用于汽車電子、工業自動化等領域。它以其高可靠性、實時性和靈活性而受到青睞。Arduino作為一個
2024-11-12 10:09:173772 CAN總線(Controller Area Network)是一種串行通信協議,主要用于汽車電子控制單元之間的通信。它由Bosch公司在20世紀80年代初開發,因其可靠性、實時性和靈活性而廣泛應用
2024-11-21 10:21:513467
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論