LIN(Local Interconnect Network)總線是基于UART/SCI(通用異步收發器/串行接口)的低成本串行通訊協議,其目標定位于車身網絡模塊節點間的低端通信
2024-01-04 17:35:33 5644
5644 
UART是異步串行通信口的總稱。它所包含的RS232RS449RS423等等是對應各種異步串行通信口的接口標準和總線標準。他們規定了通信口的電氣特性、傳輸速率、連接特性和機械特性等一系列內容,實際上屬于通信網絡的底層概念,與通信協議沒有直接關系。
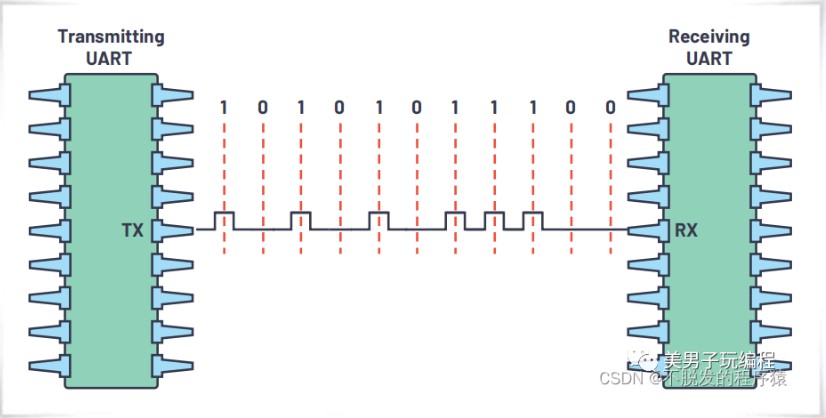
2022-07-10 09:06:023881 UART(Universal Asynchronous Receiver/Transmitter,通用異步收發器)是一種雙向、串行、異步的通信總線,僅用一根數據接收線和一根數據發送線就能實現全雙工通信。
2022-09-15 14:18:531662 假期更新了一文搞懂CAN總線協議幀格式,CAN FD總線協議怎能錯過?本篇博文將講解CAN FD總線協議幀格式。
2022-10-14 12:49:534567 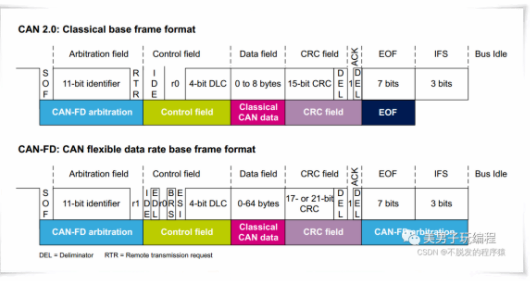
本文將介紹CAN總線通信協議的基礎知識,目前的內容僅為通用的協議部分,暫不涉及具體的外設模塊的用法。研究通信協議的具體內容,主要是看建立通信的物理環境(信號與總線拓撲結構),通信過程的對象(通信幀),以及交互過程(通信或握手過程)。
2023-06-16 10:58:168392 
了 UART協議,將并行輸入信號轉換成串行輸出信號。因為UART簡單實用的特性,其已經成為一種使用非常廣泛的通訊協議。我們日常接觸到的串口,RS232,RS485等總線,內部使用的基本都是 UART協議 。
2023-09-04 16:13:4511669 
UART(Universal Asynchronous Receiver Transmitter)通用異步收發器,是一種通用串行、異步通信總線,該總線有兩條數據線和一條地線,支持全雙工異步通信。常用于單片機與單片機或外圍輔助設備之間的通信。
2023-09-21 17:28:452852 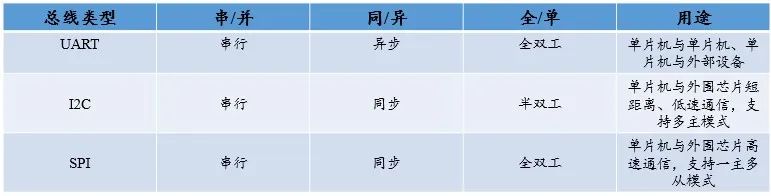
UART(UniversalAsynchronousReceiver/Transmitter,通用異步收發器)是一種常用的串行通信協議,廣泛應用于單片機或各種嵌入式設備之間的通信。本文將詳細介紹
2023-09-22 08:22:354114 
本地互聯網絡 LIN(Local Interconnect Network)總線協議,是基于UART/SCI(Universal Asynchronous Receiver-Transmitter/SerialCommunication Interface通用異步收發器/串行通信接口)的低成本串行通信協議。
2023-09-22 14:22:357298 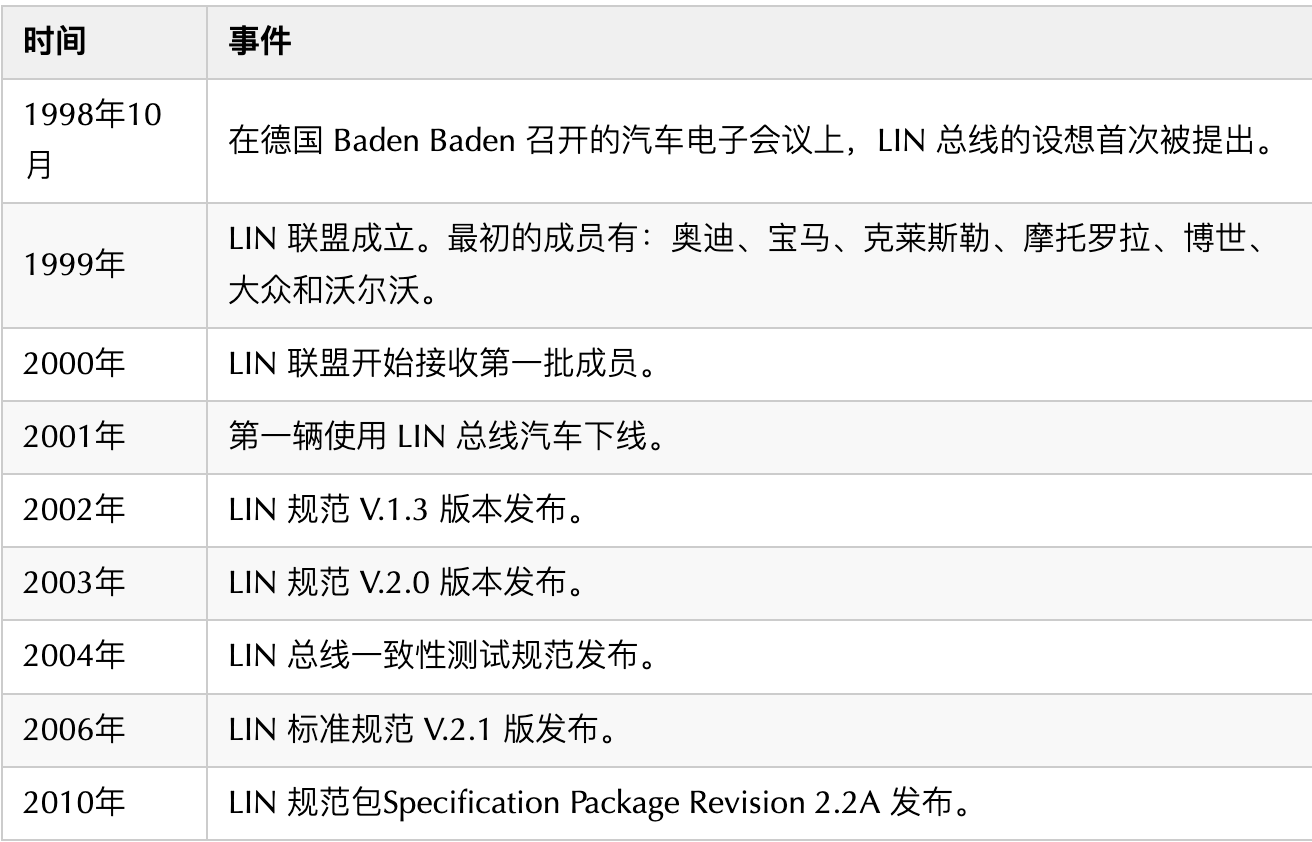
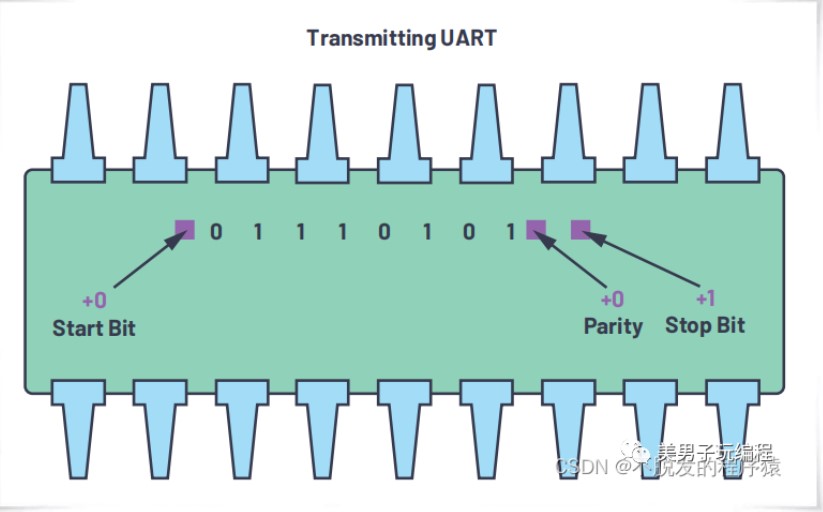
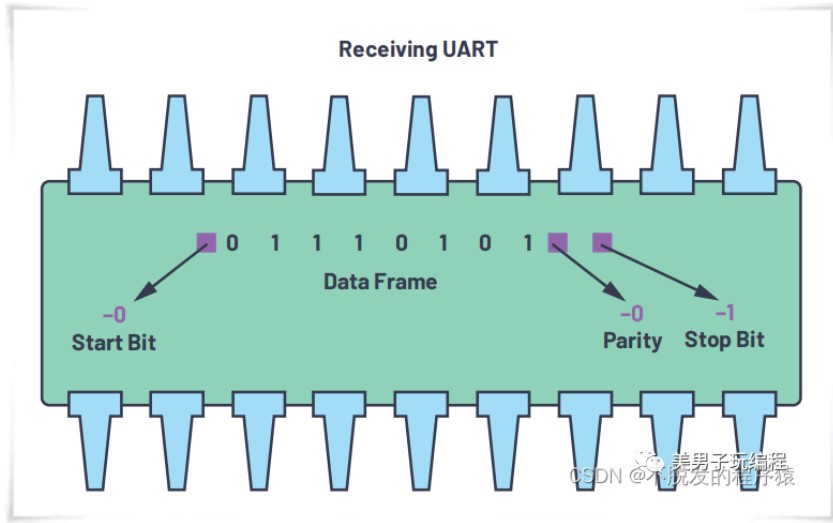
等的總線標準出現。 UART 一般以幀為單位發送數據,一幀由起始位、數據位、校驗位和停止位組成。數據逐位傳輸,幀格式如圖 1 所示。
2023-08-09 07:09:50
通信總線,該總線有兩條數據線,可以實現全雙工的發送和接受。在嵌入式系統中常用于主機與設備之間的通信。UART 幀格式起始位,1位,通知開始接收數據數據位,5-8位,一般為8位,先發地位,后發高位校驗位,可有可無停止位: 1/1.5/2位空閑位————————————————————————
2021-12-24 06:24:54
位、波特率等均可以在COM接口中設置。也可以在代碼中對UART寄存器的各位進行設置,UART寄存器的各位所代表的含義如下:下面通過幾個小程序,了解UART通信協議進行數據傳輸的過程:在這里我們
2018-01-31 10:43:06
一、前言1、簡介 寫的這篇博客,是為了簡單講解一下UART通信協議,以及UART能夠實現的一些功能,還有有關使用STM32CubeMX來配置芯片的一些操作,在后面我會以我使用的STM32F429
2022-01-25 06:40:09
#今天也是咸魚的一天~UART是一個很基礎的串口通信協議,有人打趣說只要有單片機的地方,就一定有uart。這話不假,不僅很多模塊和單片機的通信有uart,單片機和上位機之間的通信,uart也是最常
2022-01-18 09:42:42
限制。例如,標準 UART 接口可能支持每秒 115200 位的最大速度(波特率),這對于某些高速應用(如實時系統或高速數據記錄)可能不夠。在這種情況下,替代通信協議或更高速的接口(例如 SPI 或以太網)可能更合適。
2025-11-27 06:36:38
有哪些總線具備UART協議RS232、485總線:具備的原理是UART通信。唯一區別標準UART的是電平狀態。485總線使用的時候,用在工業控制中,并且會使用另一種協議:MODEBUS總線協議
2020-03-23 14:05:49
,不會占用過長總線時間,實時性強。(8),CAN每幀都有CRC校驗及其他驗錯措施。(9),接口中集成了CAN總線協議的物理層和數據鏈路層。(10),CAN的通信介質可為雙絞線或同軸電纜,光纖。(11
2014-04-27 15:16:02
發送一個和遠程幀相符的數據幀(Data Frame)。遠程幀和數據幀具有相同的標識符。6.位流(Bit Stream)CAN 總線通信過程中的數據流。7.編碼方式CAN 總線通信協議規定,報文中的位流
2018-12-14 14:37:44
要求,不會占用過長總線時間,實時性強。(8),CAN每幀都有CRC校驗及其他驗錯措施。(9),接口中集成了CAN總線協議的物理層和數據鏈路層。(10),CAN的通信介質可為雙絞線或同軸電纜,光纖。(11
2014-04-18 16:36:30
電子通信協議之CAN總線協議篇
2020-12-28 06:30:02
參照 ISO/OSI 標準模型,CAN 總線的通信參考模型如圖 9-1 所示。這 4 層結構的功能如下:? 物理層規定了節點的全部電氣特性,在一個網絡里,要實現不同節點間的數據傳輸,所有節點的物理層
2018-12-14 14:17:02
CAN總線的標準幀和擴展幀主要決定幀ID的長度,標準幀的幀ID長度是11位,也就是幀ID的范圍是000-7FF。擴展幀的幀ID長度是29位,也就是幀ID的范圍是0000 0000-1FFF FFFF。CANopen幀ID最多是11位的,因此是標準幀;而SAE 1939協議通...
2021-08-20 06:43:04
幀結構里包括中斷場、同步場、標識符場、數據場和校驗場。除了中斷場,其他每個場都是一個字節場。 字節場從本質上看,就是Uart/RS232通信。其實LIN通信唯一不同,就是多了一個中斷場
2021-02-20 16:26:24
實現從設備,則只需輸入口即可。I2C總線是雙向、兩線(SCL、SDA)、串行、多主控(multi-master)接口標準,具有總線仲裁機制,非常適合在器件之間進行近距離、非經常性的數據通信。在它的協議
2011-11-02 09:48:19
USART/UART通信是STM32的一個非常重要的外設,是一種通用串行數據總線,可實現全雙工通信,經常被使用!UART:通用異步收發器,USART:通用同步/異步收發器,可以看出USART比
2021-08-17 08:27:18
)方案,CAN-FD繼承了傳統CAN總線的主要特性,使用改動較小的物理層,雙線串行通信協議,依然基于非破壞性仲裁技術,分布式實時控制,可靠的錯誤處理和檢測機制,在此基礎上對帶寬和數據長度進行優化,將逐步
2023-02-14 14:22:23
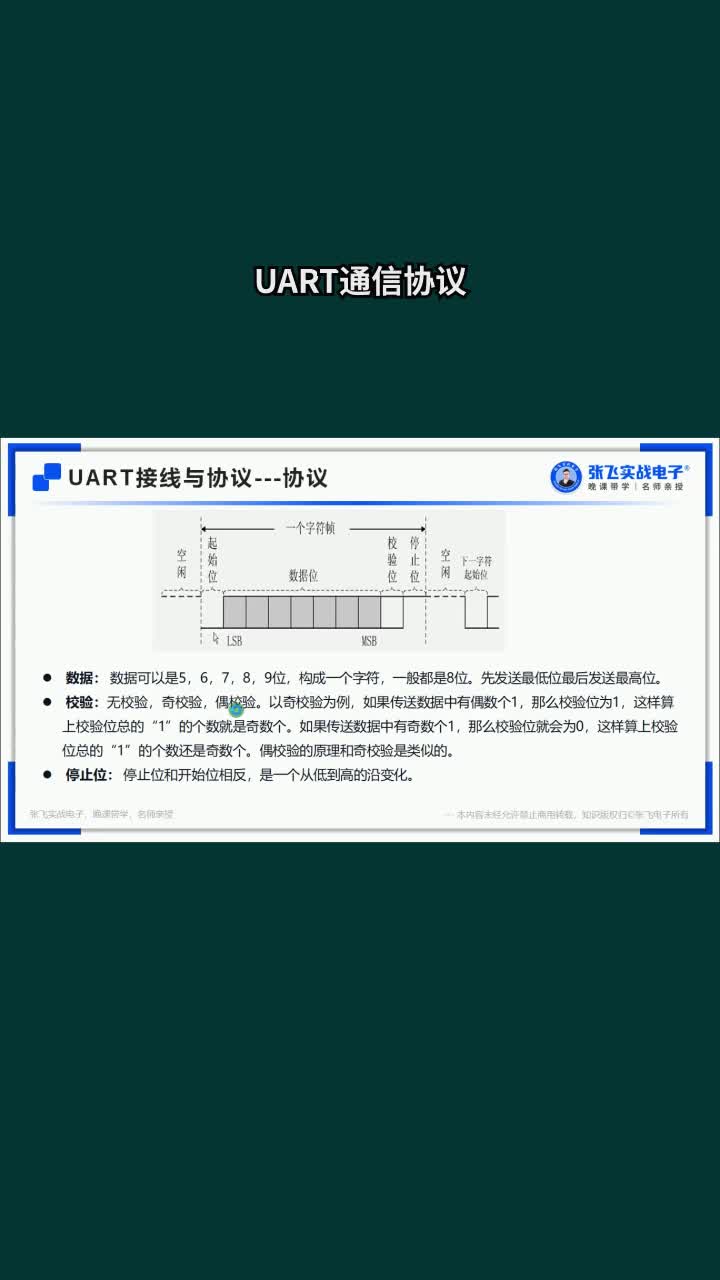
目錄一、串口通信協議1、UART簡介2、 UART通信協議(1)起始位(2)數據幀(3)奇偶校驗位(4)停止位(5)下個起始位(6)波特率二、STM32的USART串口通信(中斷)3、要求2、工程
2022-02-22 07:16:22
串行通信中的IIC總線工作原理51本身不帶IIC總線 ,使用程序模擬IIC通信協議常用的串行總線協議UART、1-wire、I2C和SPI總線UART:是以異步方式進行通信(一條數據輸入線,一條
2021-12-08 07:52:26
STM32f103開發板通過OBD2與汽車診斷系統通信,采用的協議是ISO15765-4,然后分為4種情況,波特率250K(數據幀為標準或者擴展幀)、500K(數據幀為標準或者擴展幀).初步做法:當
2018-12-13 15:55:42
如何根據通信協議GetInterUARTMessage()函數對數據幀進行判斷獲取?如何根據通信協議AnalyzeInterUARTMessage()函數對數據幀進行分類處理?
2021-12-09 06:52:38
和CAN_RX)的TTL信號轉換成CAN總線的電平信號。PS:你可以把CAN總線通信認為是UART通過485進行通信:CAN控制器就如UART的控制器,而CAN收發器就如485轉換芯片。2、ISO標準化
2018-10-10 09:53:40
那樣先存儲起來,不知道我對同步異步通信的理解是否正確?
2、這些協議下的通信設備發送數據的格式多種多樣,請問每種協議的通信發送的幀結構是怎么樣的,想總結一下這些通信協議的發送幀類型結構?
3、在支持這些
2024-01-19 14:46:29
一、常用的串行總線協議目前常用的微機與外設之間進行數據傳輸的串行總線主要有UART、1-write、I2C和SPI總線。1.UART:異步方式進行通信(一條數據輸入線、一條數據輸出
2021-11-03 07:14:31
線)SCI總線:異步方式進行通信(一條數據輸入線,一條數據輸出線)UART總線異步串口在單片機串口通信時使用1-wire(單線總線)單總線,如使用溫度傳感器時需要這種通信協議I2C串行總線它有...
2021-11-19 06:46:41
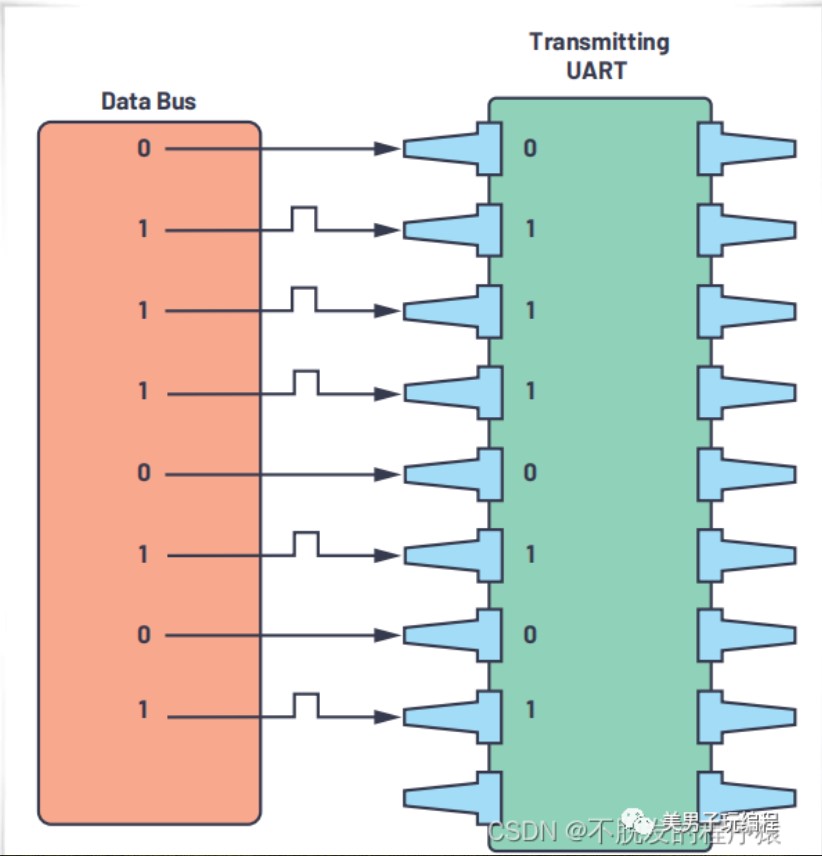
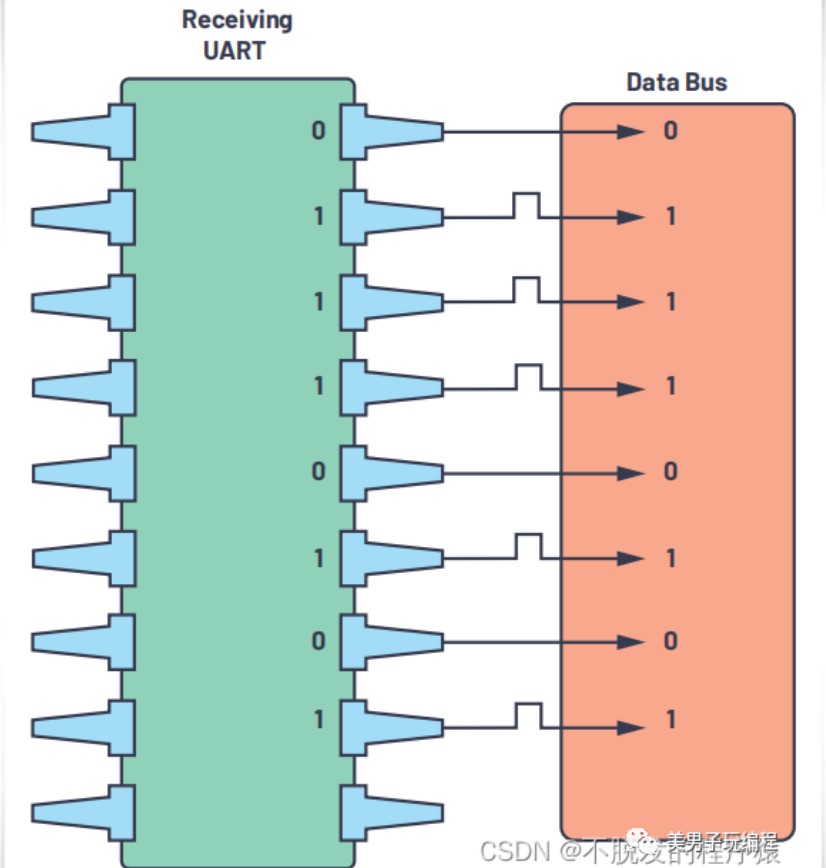
回并行數據,并將其傳輸到接收端的數據總線:優劣沒有任何通信協議是完美的,但是UART非常擅長于其工作。以下是一些利弊,可幫助您確定它們是否適合您的項目需求:優點僅使用兩根電線無需時鐘信號具有奇偶校驗
2022-02-14 13:46:56
的波特率對數據線進行采樣:
4.接收UART丟棄數據幀中的起始位,奇偶校驗位和停止位:
5.接收UART將串行數據轉換回并行數據,并將其傳輸到接收端的數據總線:
優劣
沒有任何通信協議是完美的,但是
2023-10-07 17:01:11
什么是通用異步收發傳輸器UART呢?通用異步收發傳輸器UART串口通信協議有哪些特性呢?
2021-11-01 07:03:10
串口通訊通信協議UART,以及常用外設通信協議 SPI、I2C的介紹與他們之間的區別
2015-11-30 11:28:36 96
96 STM32F103RCT6UART的斷幀檢測
2015-12-04 15:42:510 SPI、I2C、UART三種串行總線協議的區別
2017-07-17 17:23:160 基于雙CAN總線的數字伺服通信協議
2017-09-01 14:25:428 CAN總線通信協議的分析和實現 CAN總線通信協議以及其實現方法
2017-09-04 08:45:3340 UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可以實現全雙工傳輸和接收。在嵌入式設計中,UART用來主機與輔助設備通信,如汽車音響與外接AP之間的通信,與PC機通信包括與監控調試器和其它器件,如EEPROM通信。
2017-11-20 15:56:4428626 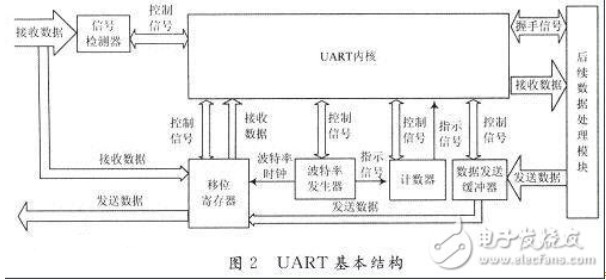
成為串行輸出的芯片UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可以實現全雙工傳輸和接收。
2017-11-20 16:19:5715905 
的CAN總線通信協議,才能完成數據準確可靠的傳輸。目前,也存在一些CAN總線產品開發公司定制的協議,如:CANOpen,DeviceNet等,與其產品捆綁在一起,而且用戶的需求不同,其協議設計不能完全合乎要求。用戶在自行開發整個系統時,必須根據需
2018-01-08 15:01:029 從LonWorks總線的介質訪問機制入手,本著沖突避免和沖突解決兩個原則,論證了LonTalk協議在實時性方面存在的問題。對LonTalk協議的MAC仲裁機制進行了改進,提出了一種新的實時通信協議
2018-01-09 17:09:261 UART通信的一幀一般由11到12位數據組成。1bit的起始位,檢測為低電平表示數據開始傳輸;緊接著8bits的數據;然后是1bit的奇偶校驗位,可以是奇校驗或者偶校驗;最后是1bit或2bits的停止位,必須為高電平,表示一個字符數據的傳輸結束。
2018-05-05 10:12:009037 
CAN:Controller Area Network,控制器局域網是一種能有效支持分布式控制和實時控制的串行通訊網絡。本文首先介紹了CAN總線系統結構及數據傳輸,其次詳細的闡述了CAN總線過載幀及數據幀,具體的跟隨小編一起來了解一下吧。
2018-05-07 10:59:0123338 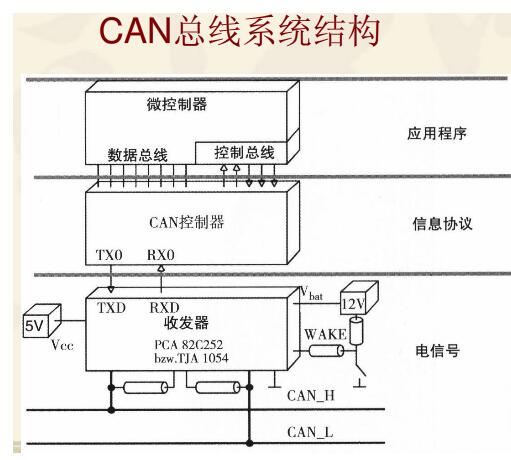
本文主要介紹了CAN總線遠程幀和錯誤幀,首先我們先來了解了解一下通訊時使用的幀類型有哪些,他們的作用又是什么,具體的跟隨小編一起來了解一下吧。
2018-05-07 11:30:2127748 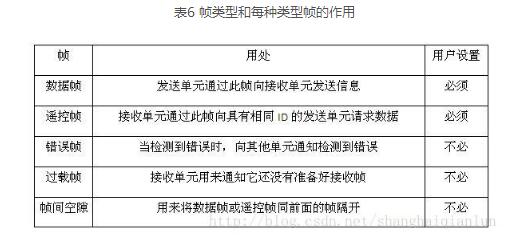
現場總線的實時信息調度算法設計,通信協議采用令牌環原理調度每一個控制模塊,從而實現基于UART的無主機分布式現場控制。
2018-12-19 16:46:547 UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可以實現全雙工傳輸和接收。在嵌入式設計中,UART用于主機與輔助設備通信,如汽車音響與外接AP之間的通信,與PC機通信包括與監控調試器和其它器件,如EEPROM通信。 [1]
2019-11-22 07:04:0014207 通用異步收發器(Universal Asynchronous Receiver/Transmitter), 通常稱作UART。UART是一種通用串行數據總線,用于異步通信。
2019-08-29 11:32:211323 UART 的幀格式,比較簡單,玩過單片機的小伙伴應該都知道。 UART 的英文全稱是:Universal Asynchronous Receiver/Transmitter,意為通用異步收發傳輸器
2020-11-25 11:14:0013 UART 9bit通信的作用是第9bit用于標識是地址或數據,第9bit 為1標識是從機地址,為0標識是數據,此外UART通信的第9bit也可作為數據的同步幀位使用。
2022-02-18 16:05:506061 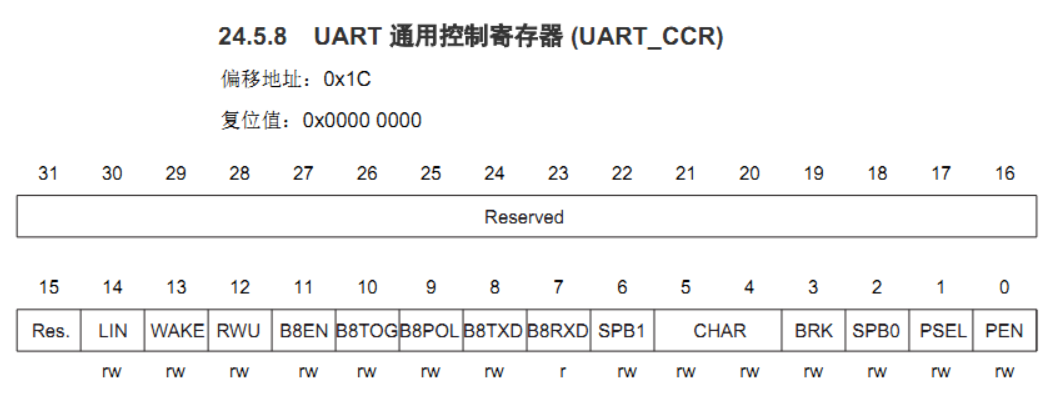
CAN總線通信協議詳細如下。
2021-04-19 16:54:3879 一、前言1、簡介 寫的這篇博客,是為了簡單講解一下UART通信協議,以及UART能夠實現的一些功能,還有有關使用STM32CubeMX來配置芯片的一些操作,在后面我會以我使用的STM32F429
2021-11-30 14:36:0622 一一介紹,今天要來了解的是Uart協議,即我們通常所說的串口通信。一、Uart協議(即串口)的基本概念UART全稱為Universal Asynchronous Receiver
2022-01-17 12:56:5713 Modbus協議無線通信網關就是將一種Modbus協議幀轉換為其他物聯網無線數傳協議幀。
2022-05-31 13:16:593026 ????通信設計中考慮協議的靈活性,經常把協議設計成“不定長度”。 一個實例如下圖:銳米LoRa終端的通信協議幀。 ????如果一個系統接收上述“不定長度”的協議幀,將會有一個挑戰--如何高效接收
2022-07-05 17:19:182729 為簡化系統設計,我們強烈建議您采用“狀態機”來解析UART數據幀,并且把解析工作放在ISR(中斷服務程序)完成,僅當接收到最后一個字節(0x0D)時,再將整個數據幀提交給進程處理。
2022-07-05 17:19:521998 UART是異步串行通信口的總稱。它所包含的RS232RS449RS423等等是對應各種異步串行通信口的接口標準和總線標準。他們規定了通信口的電氣特性、傳輸速率、連接特性和機械特性等一系列內容,實際上屬于通信網絡的底層概念,與通信協議沒有直接關系。
2022-07-10 09:20:271906 為簡化系統設計,我們強烈建議您采用“狀態機”來解析UART數據幀,并且把解析工作放在ISR(中斷服務程序)完成,僅當接收到最后一個字節(0x0D)時,再將整個數據幀提交給進程處理。
2022-08-08 10:02:24908 在本文中,我們將討論使用 UART 時的基本原則,重點是數據包傳輸、標準幀協議和自定義幀協議,這些協議在實現時(尤其是在代碼開發期間)是安全合規性的增值功能。在產品開發過程中,本文檔還旨在分享在檢查數據手冊的實際使用情況時的一些基本步驟。
2022-12-16 15:42:361748 
作為實時性要求比較高的工業控制底層網絡,CAN協議只分為3層:物理層、數據鏈入層和應用層。CAN通信協議有4種不同的幀格式:數據幀、遠程幀、錯誤幀和超載幀。
2022-12-27 10:57:042333 通用異步收發傳輸器** (Universal Asynchronous Receiver/Transmitter),通常稱作UART。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連結上。
2023-01-21 16:50:002583 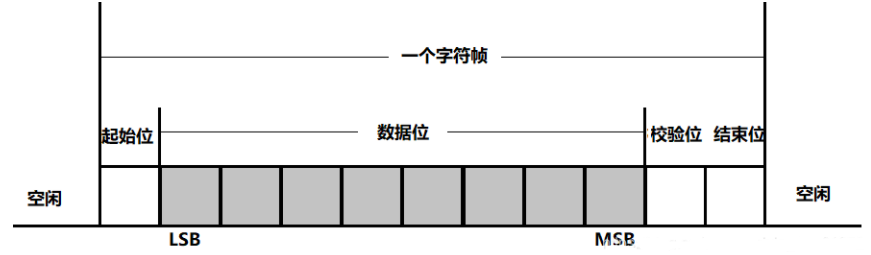
通用異步收發傳輸器** (Universal Asynchronous Receiver/Transmitter),通常稱作UART。它將要傳輸的資料在串行通信與并行通信之間加以轉換。作為把并行輸入信號轉成串行輸出信號的芯片,UART通常被集成于其他通訊接口的連結上。
2023-01-21 16:53:001714 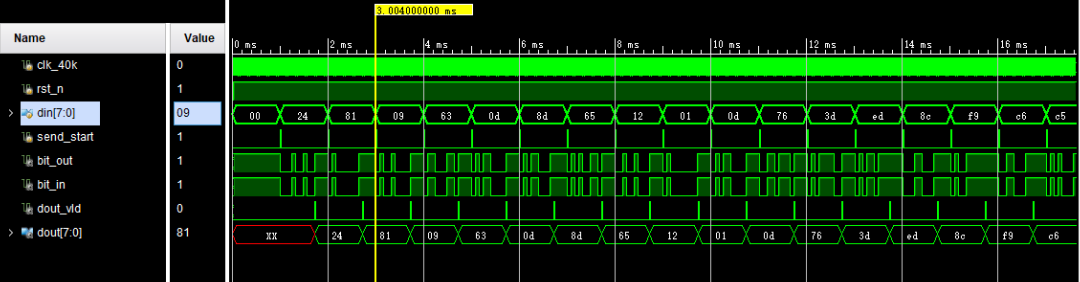
UART,即通用異步接收器/發送器,是最常用的設備間通信協議之一,正確配置后,UART可以配合許多不同類型的涉及發送和接收串行數據的串行協議工作。
2023-02-01 17:54:371644 上篇內容我們介紹了IIC總線通信接口及其協議,這一篇文章我們介紹另一種項目開發中非常常見的通信接口——SPI總線。
2023-03-22 16:11:142830 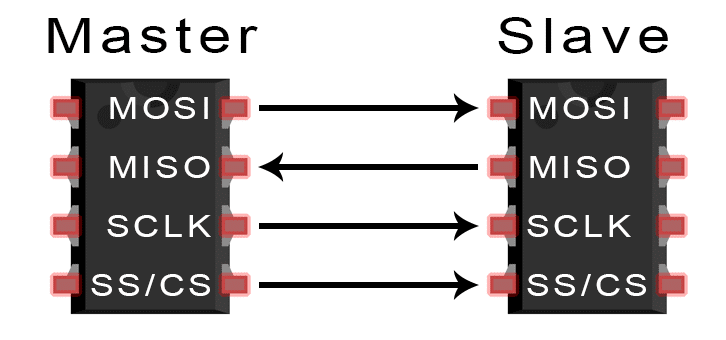
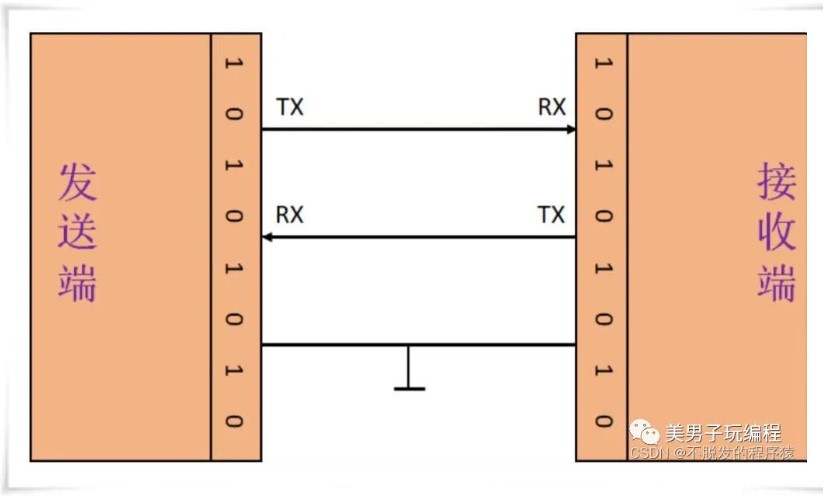
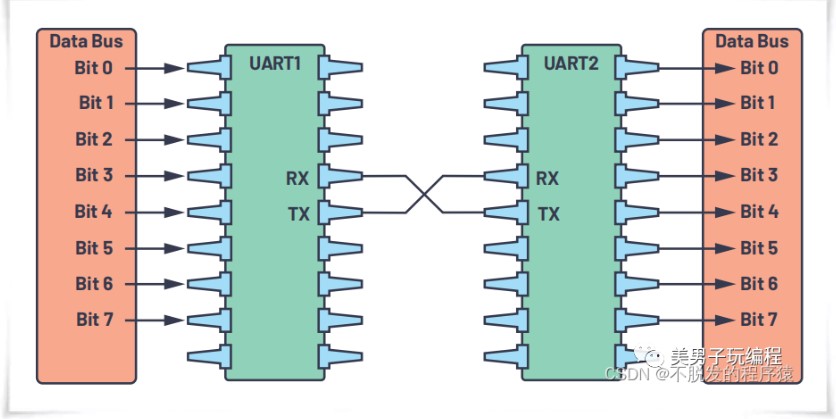
通用異步接收器/發射器,通常稱為UART,是一種串行,異步,全雙工通信協議,廣泛用于嵌入式領域。
UART連接
UART通道有兩條數據線。每個設備上都有一個 RX 引腳和一個 TX 引腳
2023-03-23 14:24:043407 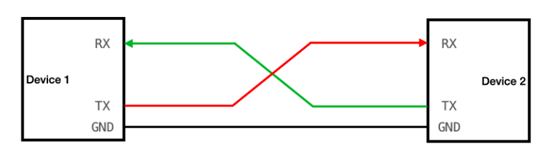
UART,即通用異步接收器/發送器,是最常用的設備間通信協議之一,正確配置后,UART可以配合許多不同類型的涉及發送和接收串行數據的串行協議工作。在串行通信中,數據通過單條線路或導線逐位傳輸。在
2023-02-02 10:46:113202 
通用異步收發傳輸器,通常稱作UART,是一種異步收發傳輸器。是異步通信協議。特性:兩根線,全雙工,異步通信,速度較慢。
2023-06-28 15:26:442969 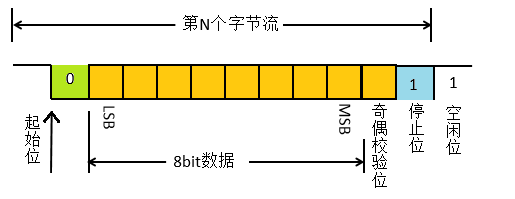
通信設計中考慮協議的靈活性,經常把協議設計成“不定長度”。一個實例如下圖:銳米LoRa終端的通信協議幀。
2023-07-18 16:09:401610 
通過 CAN 總線傳輸數據是需要按照一定協議進行的,CAN 協議提供了 5種幀格式來傳輸數據:數據幀、遙控幀、錯誤幀、過載幀和幀間隔。其中數據幀和遙控幀有標準格式和擴展格式兩種,標準格式有 11
2023-07-25 10:36:1913051 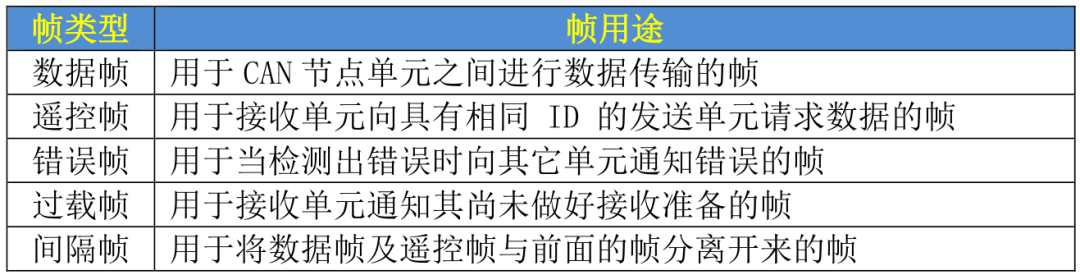
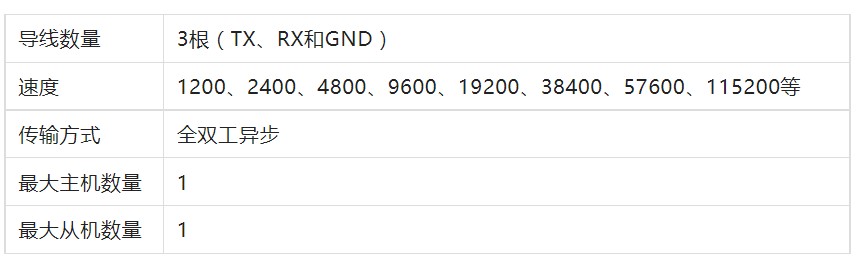
UART協議是電子傳輸中一種常見的信號協議,通常只需要三根信號線就可以完成數據的收發,分別是TX,RX,GND。 UART(universal asynchronous receiver
2023-11-06 10:08:562812 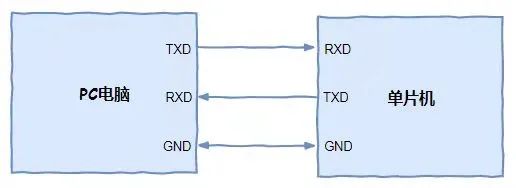
,UART等協議與下游MCU或可編程IC進行接口。I2C總線,SPI總線和UART總線之間的區別很簡單,任何使用MCU的設計人員都應該知道如何為這些協議設置路由和布局。
2023-11-08 17:33:192724 
。在19世紀60年代,為了解決計算機和電傳打字機通信,Bell發明了UART協議,將并行輸入信號轉換成串行輸出信號。因為UART簡單實用的特性,其已經成為一種使用非
2024-01-12 14:15:2219787 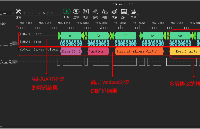
CAN通信協議中有四種幀類型,分別是數據幀、遠程幀、錯誤幀和過載幀。
2024-01-30 09:18:057810 CAN總線的標準幀和擴展幀是CAN協議中的兩種幀類型。
2024-01-30 09:41:129795 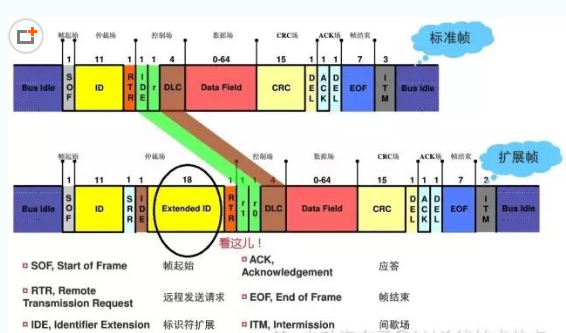
請問用CAN存儲器存儲的CAN總線數據幀格式有哪些呢? CAN總線是一種常用于汽車、工業控制和其他應用領域的串行通信協議。在CAN總線中,數據通過數據幀的形式進行傳輸。數據幀包含了發送節點和接收節點
2024-01-31 13:46:382377 總線的特性。 首先,高速CAN總線是指數據傳輸速率較高的CAN總線,其中包括CAN 2.0A和CAN 2.0B兩種協議。CAN 2.0A支持11位標準幀和29位擴展幀,最大傳輸速率可達到1 Mbps
2024-01-31 14:09:014360 UART (Universal Asynchronous Receiver/Transmitter) 是一種通信接口協議,用于實現串口通信。它是一種簡單的、可靠的、廣泛應用的串口通信協議。它是由美國
2024-03-19 17:26:102897 如果一個系統接收上述“不定長度”的協議幀,將會有一個挑戰--如何高效接收與解析。 為簡化系統設計,我們強烈建議您采用“狀態機”來解析UART數據幀。
2024-03-25 14:29:501793 
在電子通信領域,UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)是一種非常常見的串行通信協議。它被廣泛應用于各種設備之間
2024-05-27 16:09:533345 、實時性強、抗干擾能力強等優點,逐漸發展成為現代工業通信的重要標準之一。本文將對CAN總線協議的基本概念、特性、工作原理、應用領域等方面進行詳細介紹。
2024-05-27 16:32:172855 CAN(Controller Area Network)總線是一種用于汽車和工業自動化領域的通信協議。它具有高可靠性、實時性和靈活性,廣泛應用于各種電子控制單元(ECU)之間的通信。 CAN總線概述
2024-07-24 15:06:322425 CAN(Controller Area Network)是一種用于汽車和工業領域的通信協議,它允許多個設備在同一總線上進行通信。CAN協議有兩種幀類型:標準幀和擴展幀。這兩種幀類型在結構和應用場
2024-07-24 15:20:184554 。 1. CAN協議簡介 在深入了解CAN FD之前,讓我們先回顧一下CAN協議的基本原理。CAN是一種基于消息的通信協議,它允許多個設備在沒有中央控制單元的情況下相互通信。CAN協議的核心是其數據幀結構,它包括標識符(ID)和數據字段。 1.1 CAN標準幀結構 標準的CAN幀由
2024-07-24 15:22:314523 CAN(Controller Area Network)是一種用于汽車和工業自動化領域的現場總線通信協議。CAN協議具有多種幀格式,包括標準幀和擴展幀。在實際應用中,標準幀和擴展幀是可以共存的,但
2024-07-24 15:24:063678 UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)通信協議是一種常見的串行通信協議,廣泛應用于計算機、嵌入式系統、傳感器、無線通信
2024-07-25 18:07:322951 UART(Universal Asynchronous Receiver/Transmitter,通用異步收發傳輸器)協議是一種廣泛使用的串行通信協議,它允許計算機與外部設備之間通過串行接口進行數據傳輸。以下是對UART協議的詳細解析,包括其定義、工作原理、數據幀結構、優缺點以及應用場景等方面。
2024-08-25 17:15:216993 UART是一種通用串行數據總線,用于異步通信。該總線雙向通信,可實現全雙工傳輸和接收。UART通常用來實現與PC之間數據通信,命令和控制信息的傳輸等。本文我們介紹UART通信協議、傳輸時序及如何利用HDL編程實現FPGA與PC通信。
2024-10-24 14:20:333128 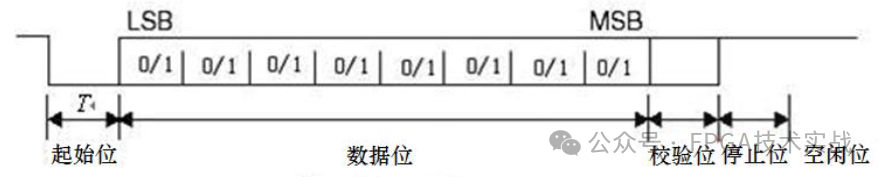
CAN總線與其他串行通信協議相比,具有其獨特的特點和優勢。以下是對CAN總線與UART、I2C、SPI等常見串行通信協議的比較: 一、基本特性比較 協議名稱 引腳 雙工方式 時鐘 電平 設備應用場
2024-11-12 09:56:023045 CAN總線由Bosch公司在1980年代開發,旨在為汽車電子系統提供一個可靠的通信網絡。隨著技術的發展,CAN總線已經被廣泛應用于各種工業和自動化領域。 2. CAN總線數據幀概述 CAN總線的數據
2024-11-12 10:12:174401 在現代計算機系統中,總線通信協議扮演著至關重要的角色。它們定義了數據如何在處理器、內存、輸入/輸出設備等組件之間傳輸。 總線通信協議的基本概念 總線通信協議是一組規則,它規定了數據在系統總線上的傳輸
2024-12-31 10:07:192065 廣播發送的短幀結構,還體現在其錯誤檢測機制上。通過總線數據以及總線波形來分析總線故障時,CAN協議錯誤檢測機制中豐富的錯誤幀類型能讓定位問題的效率更高。錯誤幀是CA
2025-01-15 10:03:491074 
一、UART通信協議概述UART(通用異步收發器)是一種廣泛應用于嵌入式系統的串行通信協議,其核心特點為無需時鐘同步,通過起始位、數據位、校驗位和停止位構成數據幀。在語音芯片應用中,UART常用
2025-05-27 08:48:43592 
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論