。本文討論這些微處理器與CAN控制器的接口問題,重點(diǎn)介紹CAN控制器與TMS320系列DSP的接口方法和接口電路。 1 CAN控制器的接口信號和時(shí)序CAN控制器(以PCX82C200或SJA1000為例
2018-12-03 15:22:37
1、簡介 CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是一種能夠?qū)崿F(xiàn)分布式實(shí)時(shí)控制的串行通信網(wǎng)絡(luò)。 優(yōu)點(diǎn): 傳輸速度最高到1Mbps,通信距離最遠(yuǎn)到
2022-01-12 06:08:19
描述BACnet協(xié)議的體系結(jié)構(gòu),分析BACnet控制器的功能,論證基于嵌入式Linux開發(fā)BACnet控制器的可行性;給出BACnet控制器軟件的體系結(jié)構(gòu)及其軟件設(shè)計(jì)。嵌入式Linux 體系結(jié)構(gòu)BACnet協(xié)議是一種為樓宇自動控制網(wǎng)絡(luò)所制定的數(shù)據(jù)通信協(xié)議。
2019-09-20 08:07:27
DP1040C是一款應(yīng)用于
CAN 協(xié)議
控制器和物理總線之間的接口芯片,可應(yīng)用于卡車、公交、小汽車、工業(yè)
控制等領(lǐng)域,速率可達(dá)到
1Mbps,具有在總線與
CAN 協(xié)議
控制器之間進(jìn)行差分信號傳輸?shù)哪芰?/div>
2020-10-28 17:02:41
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點(diǎn)3.CAN總線物理層4.CAN報(bào)文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點(diǎn)2.STM32CAN架構(gòu)
2021-08-19 06:34:16
的報(bào)文。它也支持報(bào)文發(fā)送的優(yōu)先級要求(優(yōu)先級特性可軟件配置)。對于安全緊要的應(yīng)用, bxCAN提供所有支持時(shí)間觸發(fā)通信模式所需的硬件功能。STM32至少配備一個(gè)bxCAN控制器,它具有如下幾個(gè)特點(diǎn):支持CAN協(xié)議2.0A和2.0B主動模式波特率最高可達(dá)1Mbps支持時(shí)間觸發(fā)通信功能11位的標(biāo)準(zhǔn)
2021-08-19 07:01:08
DP1040T一款應(yīng)用于CAN協(xié)議控制器和物理總線之間的接口芯片,可應(yīng)用于卡車、公交、小汽車、工業(yè)控制等領(lǐng)域,速率可達(dá)到1Mbps,具有在總線與CAN協(xié)議控制器之間進(jìn)行差分信號傳輸?shù)哪芰ΑL攸c(diǎn)
2023-03-23 10:14:58
VISION控制器標(biāo)定及網(wǎng)絡(luò)分析工具
2021-01-19 07:25:37
我正在使用XMC4108控制器來測試CAN通信。 我將CAN配置為1mbps的速度。 我正在使用 PCAN 測試傳輸和接收。 傳輸工作正常。
CAN
2024-01-25 07:46:55
● 超低功耗: 1.2mA/通道(1Mbps 時(shí))功耗更低,電路簡單、穩(wěn)定性更高● 高速率: 25Mbps,傳輸速度快,脈寬失真小,低延時(shí),性能優(yōu)越● 節(jié)省PCB面積,結(jié)構(gòu)簡單,方案更加靈活● 電路
2021-11-04 16:30:06
概述CA-IS306X是一款具有集成式高效電源轉(zhuǎn)換器的隔離式控制區(qū)域網(wǎng)絡(luò)(CAN)物理層收發(fā)器,符合ISO11898-2標(biāo)準(zhǔn)的技術(shù)規(guī)范。此器件采用片上二氧化硅(SiO2)電容作為隔離層,在CAN協(xié)議
2021-10-19 15:59:21
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測試好了
2023-12-11 07:00:33
?微處理器,內(nèi)置CAN控制器。采 用典型系統(tǒng)時(shí)鐘(fsclk)值,TQ整數(shù)值以粗體顯示(用于1 Mbps 的有效時(shí)鐘/BRP組合)。 表1. 用于1 Mbps的時(shí)鐘和BRP組合第2步:位段配置下一步
2018-10-16 17:00:07
■內(nèi)置單軸控制器,節(jié)省上位控制器的脈沖輸出點(diǎn)數(shù)■可配置16段路徑程序,支持回零/速度/位置/JOG等功能■隔離型RS485總線,支持多達(dá)31軸的RS485從站網(wǎng)絡(luò)■7路數(shù)字量輸入,支持原點(diǎn)、限位、急
2021-09-01 08:19:59
的節(jié)點(diǎn)鏈表。網(wǎng)關(guān)功能嵌入式應(yīng)用中通常有多個(gè)CAN網(wǎng)絡(luò),以適合該應(yīng)用的不同速度運(yùn)行。有些報(bào)文需要從一個(gè)總線系統(tǒng)傳輸?shù)搅硪粋€(gè)總線系統(tǒng)。網(wǎng)關(guān)功能對實(shí)現(xiàn)上述應(yīng)用非常有效,而且還有可能將網(wǎng)關(guān)和FIFO功能
2018-12-07 10:09:17
本帖最后由 welsonwxp 于 2021-1-4 09:32 編輯
CA-IS3062是一款隔離式控制區(qū)域網(wǎng)絡(luò)(CAN)物理層收發(fā)器,同時(shí)內(nèi)部集成隔離式DC-DC轉(zhuǎn)換器。符合
2021-01-04 09:28:50
運(yùn)動控制技術(shù)是制造自動化的關(guān)鍵基礎(chǔ),其水平高低是衡量一個(gè)國家工業(yè)現(xiàn)代化的重要標(biāo)志,研究和開發(fā)具有開放式結(jié)構(gòu)的運(yùn)動控制器是當(dāng)前運(yùn)動控制領(lǐng)域的一個(gè)重要發(fā)展方向。隨著集成電路技術(shù)、微電子技術(shù)、計(jì)算
2019-09-04 07:10:42
運(yùn)動控制技術(shù)是制造自動化的關(guān)鍵基礎(chǔ),其水平高低是衡量一個(gè)國家工業(yè)現(xiàn)代化的重要標(biāo)志,研究和開發(fā)具有開放式結(jié)構(gòu)的運(yùn)動控制器是當(dāng)前運(yùn)動控制領(lǐng)域的一個(gè)重要發(fā)展方向。隨著集成電路技術(shù)、微電子技術(shù)、計(jì)算
2019-08-30 08:27:17
BACnet網(wǎng)絡(luò)體系結(jié)構(gòu)和控制器功能是什么基于嵌入式Linux開發(fā)軟件的可行性BACnet控制器軟件怎么實(shí)現(xiàn)?
2021-04-28 06:23:04
的隔離式 CAN 節(jié)點(diǎn),我們將以它為例來計(jì)算所需的 CAN控制器參數(shù),以便在 20 米電纜上以 1 Mbps 的速度進(jìn)行通信。一個(gè) CAN 比特由四個(gè)獨(dú)立的時(shí)間段組成 :同步段 (SYNC_SEG
2018-10-15 10:35:50
單片機(jī)與嵌入式系統(tǒng) 重慶通信學(xué)院陳大亮 劉鵬 蘇丹引 言運(yùn)動控制器是運(yùn)動控制系統(tǒng)的核心部件。目前,國內(nèi)的運(yùn)動控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動控制器。這類運(yùn)動控制器
2019-07-31 07:52:19
由于時(shí)變非線性和強(qiáng)耦合的控制系統(tǒng)還沒有精確的數(shù)學(xué)模型,因而傳統(tǒng)的依賴被控對象數(shù)學(xué)模型的控制策略及其控制系統(tǒng)的封閉式結(jié)構(gòu)很難對其實(shí)施有效控制。神經(jīng)網(wǎng)絡(luò)控制能夠很好地克服系統(tǒng)中模型參數(shù)的變化和非線性等
2019-08-12 06:25:35
2000 標(biāo)準(zhǔn)規(guī)定 NMEA 2000 的波特率為 250K,并詳細(xì)說明了電纜和連接器等要求。
PSoC 能夠利用 CAN 控制器,是簡單傳感器應(yīng)用的良好平臺。
我想知道是否有人使用 PSoC CAN 控制器實(shí)現(xiàn)了 NMEA 2000 網(wǎng)絡(luò)功能設(shè)備,如果有,他們是否愿意透露詳情?
2024-05-23 07:04:39
客車網(wǎng)絡(luò)控制中CAN/CAN網(wǎng)橋設(shè)計(jì)摘要: 本文以LPC2119 微控制器為核心設(shè)計(jì)了客車網(wǎng)絡(luò)控制中CAN/CAN 網(wǎng)橋, 實(shí)現(xiàn)了不同CAN 網(wǎng)段連接、報(bào)文過濾和轉(zhuǎn)發(fā)功能。文中分析和闡述了該網(wǎng)橋
2009-12-01 10:29:53
今后基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的運(yùn)動控制器仍然是市場的主流,但是,基于網(wǎng)絡(luò)的嵌入式運(yùn)動控制器會有較大的發(fā)展。基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的通用運(yùn)動控制器主要是板卡結(jié)構(gòu),采用的總線大都為ISA、PCI。由于它們的應(yīng)用依附于通用PC 計(jì)算機(jī)平臺,從工業(yè)控制的角度分析,這種運(yùn)動控制器的優(yōu)缺點(diǎn)如下:
2019-07-23 06:46:17
CA-IS3062W集成隔離電源的隔離式CAN收發(fā)器概述CA-IS306X是一款具有集成式高效電源轉(zhuǎn)換器的隔離式控制區(qū)域網(wǎng)絡(luò)(CAN)物理層收發(fā)器,符合ISO11898-2標(biāo)準(zhǔn)的技術(shù)規(guī)范。此器件采用
2021-12-08 10:27:04
CAN協(xié)議具有哪些特點(diǎn)?CAN協(xié)議的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)是如何構(gòu)成的?怎樣去使用STM32F1的CAN控制器呢?
2021-11-01 07:19:11
求一個(gè)基于BP神經(jīng)網(wǎng)絡(luò)PID控制器應(yīng)用于雙閉環(huán)直流調(diào)速系統(tǒng)BP_PID控制器學(xué)習(xí)參數(shù)怎么設(shè)置?
2021-10-13 08:10:12
大家都使用什么型號的can控制器獨(dú)立can控制器除了nxp和microchip兩家,還有誰生產(chǎn)嗎?與2440配合使用有沒有什么較好的方案
2013-06-21 10:52:44
網(wǎng)關(guān)控制器是整車電子電氣架構(gòu)中的核心部件,其作為整車網(wǎng)絡(luò)的數(shù)據(jù)交互樞紐,可將 CAN、LIN、MOST、FlexRay、Ethernet 等網(wǎng)絡(luò)數(shù)據(jù)在不同網(wǎng)絡(luò)中進(jìn)行路由。此外,由于獨(dú)立網(wǎng)關(guān)控制器
2020-12-21 06:23:21
提問:如何計(jì)算控制器參數(shù)使隔離式CAN(控制器區(qū)域網(wǎng)絡(luò))網(wǎng)絡(luò)以1Mbps的速度運(yùn)行?請看博主安利的一種計(jì)算方法吧,當(dāng)然新技能一定要轉(zhuǎn)發(fā)哦~答:CAN是一種差分信號標(biāo)準(zhǔn),用于不同系統(tǒng)之間的串行通信
2018-10-26 11:46:37
一.CAN簡介 CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,是國際上應(yīng)用最廣泛的現(xiàn)場總線
2016-07-06 16:53:07
運(yùn)動控制器是運(yùn)動控制系統(tǒng)的核心部件。目前,國內(nèi)的運(yùn)動控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動控制器。這類運(yùn)動控制器速度較慢、精度不高、成本相對較低,只能在一些低速運(yùn)行和對軌跡要求不高的輪廓運(yùn)動控制場合應(yīng)用。
2019-10-16 06:22:14
隨著目前越來越多的系統(tǒng)在不同電壓下運(yùn)行,從電梯到電動汽車,甚至海事系統(tǒng),隔離式CAN收發(fā)器已經(jīng)成為不可或缺的一部分。這些收發(fā)器將CAN(控制器區(qū)域網(wǎng)絡(luò))標(biāo)準(zhǔn)的優(yōu)先和仲裁功能合二為一,并提供隔離的優(yōu)勢(斷開接地環(huán)路、耐壓力差、共模瞬變抗擾度等),有助于保持系統(tǒng)中兩個(gè)電壓域之間的可靠通信。
2019-07-31 07:11:00
介紹一種以8051微控制器和82527獨(dú)立CAN總線控制器為核心組成的CAN總線智能傳感器節(jié)點(diǎn)的設(shè)計(jì)方法,并給出其硬件原理圖和初始化程序。
2009-07-17 08:41:16 26
26 CAN控制器模塊世界向著網(wǎng)絡(luò)化方向發(fā)展,測控系統(tǒng)也不例外。CAN總線的出現(xiàn),使控制系統(tǒng)的網(wǎng)絡(luò)化成為可能,是國際公認(rèn)的一種現(xiàn)場總線協(xié)議。CAN (Controller Area Network)總
2009-09-21 08:39:1513 FC3A型開放式網(wǎng)絡(luò)控制器使用指南
加強(qiáng)了與開放式網(wǎng)絡(luò)控制器進(jìn)行連接及通信功能的開放式網(wǎng)絡(luò)控制器。• 與世界標(biāo)準(zhǔn)的開放式網(wǎng)絡(luò)(INTERBUS®、L
2010-04-02 10:56:4112 TMS320LF2407 CAN控制器實(shí)驗(yàn)實(shí)驗(yàn)?zāi)康模?
1、掌握TMS320LF2407 CAN控制器模塊的工作原理
2、掌握TMS320LF2407 CAN控制器模
2008-10-17 22:35:55 1217
1217 基于CAN/LIN總線的車身網(wǎng)絡(luò)中央控制器設(shè)計(jì)
?1 前言
??? 隨著對車輛舒適性要求的提高和更多輔助智能功能的出現(xiàn),ECU單元
2010-03-11 15:45:20932 固高公司的基于網(wǎng)絡(luò)的運(yùn)動控制器主要是由網(wǎng)絡(luò)接口模塊和運(yùn)動控制器組成。基于網(wǎng)絡(luò)的運(yùn)動控制器主要應(yīng)用于那些執(zhí)行元件與控制系統(tǒng)之間的距離較遠(yuǎn)和分散,為了減少系統(tǒng)聯(lián)線、提
2011-07-06 18:16:0836 ADM3053是一款隔離式控制器區(qū)域網(wǎng)絡(luò)(CAN)物理層收發(fā)器,集成隔離DC/DC轉(zhuǎn)換器,符合ISO 11898標(biāo)準(zhǔn)。 該器件采用ADI公司的iCoupler技術(shù),將雙通道隔離器、CAN收發(fā)器和ADI公司的isoPower DC/DC轉(zhuǎn)換器
2011-10-17 14:35:13155 提出了一種基于CAN總線的分布式水下航行器控制器的設(shè)計(jì)方法,主要描述了其硬件總體設(shè)計(jì)方案和實(shí)現(xiàn)辦法。控制器作為分布式控制系統(tǒng)的一個(gè)節(jié)點(diǎn),與其他節(jié)點(diǎn)之間以CAN總線連接并形
2013-06-08 17:54:5531 基于Zigbee的路燈區(qū)域控制器設(shè)計(jì)...
2016-01-04 15:26:5833 配置控制器局域網(wǎng)絡(luò)(CAN)位時(shí)序,優(yōu)化系統(tǒng)性能
2016-01-07 16:18:570 隨著計(jì)算機(jī)技術(shù)、通信技術(shù)、集成電路技術(shù)和控制技術(shù)的發(fā)展,傳統(tǒng)的工業(yè)控制領(lǐng)域正經(jīng)歷著一場前所未有的變革,開始向網(wǎng)絡(luò)化方向發(fā)展。本文即從未來工業(yè)控制網(wǎng)絡(luò)發(fā)展的需要出發(fā),設(shè)計(jì)并實(shí)現(xiàn)了以S3C2410微處理器為核心的嵌入式網(wǎng)絡(luò)控制器。
2017-09-01 14:38:514 帶CAN 控制器的單片8 位微控制器
2017-09-22 10:06:578 。 隔離式CAN網(wǎng)絡(luò)的傳播延遲比非隔離式CAN網(wǎng)絡(luò)要長,設(shè)計(jì)起來可能頗具挑戰(zhàn)性。圖1顯示一個(gè)使用信號和電源隔離CAN收發(fā)器ADM3053的隔離式CAN節(jié)點(diǎn),我們將以它為例來計(jì)算所需的CAN控制器參數(shù),以便在20米電纜上以1 Mbps的速度進(jìn)行通信。 一個(gè)
2017-11-16 17:37:106 軟件定義網(wǎng)絡(luò)(SDN)采用一種控制平面和數(shù)據(jù)平面分離的網(wǎng)絡(luò)架構(gòu),其控制功能由控制器來實(shí)現(xiàn)。由于受到控制器處理能力的限制,在大型的SDN網(wǎng)絡(luò)中,單一的控制器無法滿足全體交換機(jī)的控制需要,必須使用多個(gè)
2018-01-31 14:48:210 microchip公司的MCP2517FD是成本效益和小占位尺寸的CAN FD(靈活數(shù)據(jù)速率)控制器,具有和微處理器(MCU)接口的SPI接口.器件支持經(jīng)典格式(CAN2.0B)和CAN靈活數(shù)據(jù)速率
2018-05-25 01:25:0013572 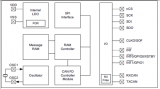
ac控制器是接入控制器(Access Controller或Wireless Access oint Controller),即無線控制器,是一種網(wǎng)絡(luò)設(shè)備,負(fù)責(zé)管理某個(gè)區(qū)域內(nèi)無線網(wǎng)絡(luò)中的AP。
2018-03-27 15:37:0756069 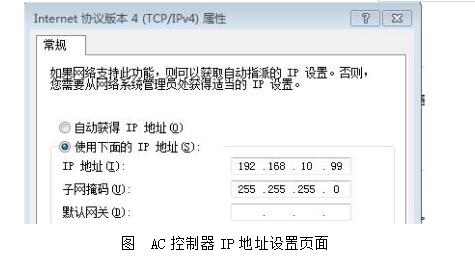
ac控制器是接入控制器(Access Controller或Wireless Access Point Controller),即無線控制器,是一種網(wǎng)絡(luò)設(shè)備,負(fù)責(zé)管理某個(gè)區(qū)域內(nèi)無線網(wǎng)絡(luò)中的AP。
2018-03-27 15:51:04129916 本文檔介紹了增強(qiáng)控制器區(qū)域網(wǎng)絡(luò)(eCAN)對設(shè)備和f2823x F2833x。
2018-04-11 16:08:5717 增強(qiáng)控制器區(qū)域網(wǎng)絡(luò)(eCAN)在C28x?DSP實(shí)現(xiàn)的模塊是一個(gè)完整的CAN控制器與CAN 2.0B協(xié)議兼容。
2018-04-12 16:51:164 這個(gè)應(yīng)用報(bào)告描述了一個(gè)配置CAN 節(jié)點(diǎn)以及在網(wǎng)絡(luò)上執(zhí)行CAN 通信的典型步驟。
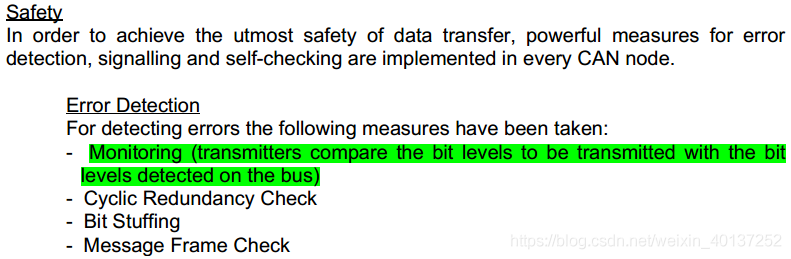
控制器局域網(wǎng)是一個(gè)串行多主控通信協(xié)議, 此協(xié)議高效支持分布式實(shí)時(shí)控制,具有高級安全級別,和一個(gè)高達(dá)1Mbps 的通信速率。CAN 總線是嘈雜和惡劣的環(huán)境,諸如汽車和其他要求可靠通信的工業(yè)領(lǐng)域應(yīng)用的理想選擇。
2018-04-16 17:48:192 ISO 11898-5-2007道路車輛.控制器區(qū)域網(wǎng)絡(luò)——低功率模式的高速媒體訪問單元
2018-04-28 10:11:373 SJA1000 是一種獨(dú)立控制器用于移動目標(biāo)和一般工業(yè)環(huán)境中的區(qū)域網(wǎng)絡(luò)控制CAN 它是PHILIPS半導(dǎo)體PCA82C200 CAN 控制器BasicCAN 的替代產(chǎn)品而且它增加了一種新的工作模式PeliCAN ,這種模式支持具有很多新特性的CAN 2.0B 協(xié)議。
2018-12-12 16:25:5237 了解如何利用信號和功率隔離式CAN收發(fā)器以及從Blackfin ezkit接收CAN信息的微控制器,使機(jī)械臂控制器板達(dá)到簡化操作、提高精度的目標(biāo)。
2019-06-11 06:07:004203 TI公司的CAN4550-Q1是集成了收發(fā)器的汽車控制器局域網(wǎng)絡(luò)(CAN)靈活數(shù)據(jù)速率(FD)控制器,支持?jǐn)?shù)據(jù)速率高達(dá)標(biāo)8Mbps,滿足ISO11898-1:2015高速CAN數(shù)據(jù)鏈接層的指標(biāo),滿足ISO11898–2:2016高速CAN指標(biāo)
2019-08-04 10:37:265631 
SJA1000 是一種獨(dú)立控制器用于移動目標(biāo)和一般工業(yè)環(huán)境中的區(qū)域網(wǎng)絡(luò)控制CAN 它是PHILIPS半導(dǎo)體PCA82C200 CAN 控制器BasicCAN 的替代產(chǎn)品而且它增加了一種新的工作模式PeliCAN,這種模式支持具有很多新特性的CAN 2.0B 協(xié)議。
2019-09-05 17:24:5911 控制器局域網(wǎng)是連接設(shè)備、系統(tǒng)傳感器的微型控制器的串行總線網(wǎng)絡(luò)。CAN主要用于汽車等低半徑區(qū)域的不同設(shè)備之間的通信。
2021-06-17 17:34:423387 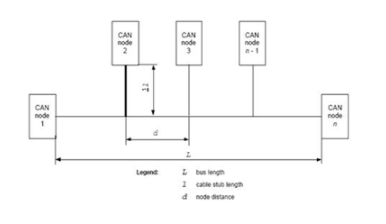
為了使網(wǎng)絡(luò)協(xié)調(diào)器和網(wǎng)絡(luò)管理正常工作,需要選擇高性能的控制器。此處的高性能與ZigBee網(wǎng)絡(luò)中的終端設(shè)備和路由器使用的控制器有關(guān)。高性能和強(qiáng)大的處理能力是網(wǎng)絡(luò)協(xié)調(diào)器的控制器重要的參考因素。
2020-11-19 15:49:293462 隔離式 8 端口 PoE PSE 控制器無需光耦合器以實(shí)現(xiàn)最低的解決方案成本
2021-03-20 14:54:075 一、CAN控制器CAN控制器用于將欲收發(fā)的消息(報(bào)文),轉(zhuǎn)換為符合CAN規(guī)范的CAN幀,通過CAN收發(fā)器,在CAN-bus上交換信息。CAN控制器分類CAN控制器芯片分為兩類:獨(dú)立的控制器芯片,如
2021-12-04 11:21:0928 1、STM32自帶了基本擴(kuò)展CAN外設(shè),又稱bxCAN,bxCAN的特點(diǎn)如下: 支持CAN協(xié)議2.0A和2.0B主動模式 波特率最高達(dá)1Mbps 支持時(shí)間觸發(fā)通信 具有3個(gè)發(fā)送郵箱 具有3級深度的2
2021-12-08 18:06:1015 CAN是控制器局域網(wǎng)絡(luò)的簡稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)的,并最終成為國際標(biāo)準(zhǔn),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。
2022-03-14 09:53:339598 
電子發(fā)燒友網(wǎng)站提供《1Mbps隔離式RS485參考設(shè)計(jì).zip》資料免費(fèi)下載
2022-09-07 17:17:125 CAN是一種廣泛用于汽車的差分信號標(biāo)準(zhǔn), 工業(yè)和儀器儀表行業(yè)。它用于串行通信 在可以連接到不同電源系統(tǒng)的系統(tǒng)之間,通常 長距離。由于這些環(huán)境,電流隔離通常是 用于斷開接地回路或提供人身安全。
2023-01-29 09:58:181605 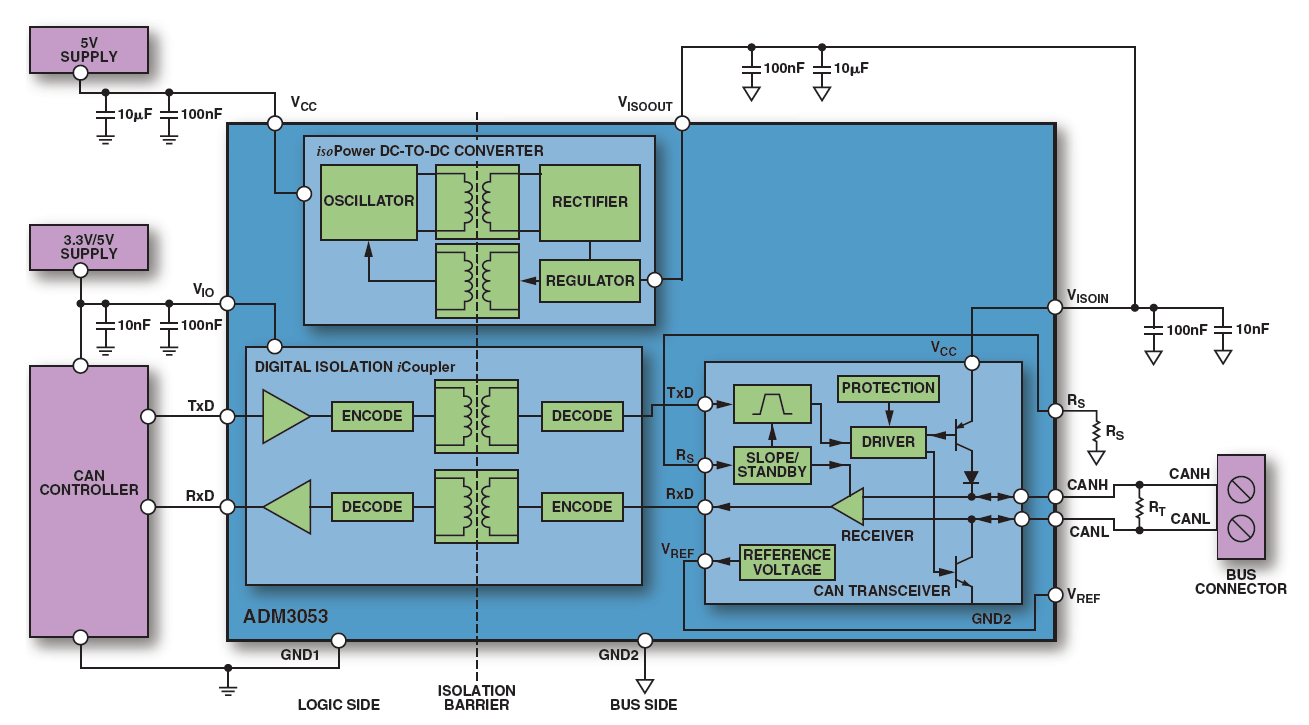
DP1050是一款應(yīng)用于 CAN 協(xié)議控制器和物理總線之間的接口芯片,可應(yīng)用于卡車、公交、小汽車、工業(yè)控制等領(lǐng)域,速率可達(dá)到 1Mbps,具有在總線與 CAN 協(xié)議控制器之間進(jìn)行差分信號傳輸?shù)哪芰Γ耆嫒荨癐SO 11898”標(biāo)準(zhǔn)。
DP1050芯片特點(diǎn)
2023-02-25 20:47:212635 
CAN是一種廣泛用于汽車的差分信號標(biāo)準(zhǔn), 工業(yè)和儀器儀表行業(yè)。它用于串行通信 在可以連接到不同電源系統(tǒng)的系統(tǒng)之間,通常 長距離。由于這些環(huán)境,電流隔離通常是 用于斷開接地回路或提供人身安全。
2023-04-04 11:28:321297 
SJA1000 是一種獨(dú)立控制器 用于移動目標(biāo)和一般工業(yè)環(huán)境中的區(qū)域網(wǎng)絡(luò)控制 CAN 它是 PHILIPS
半導(dǎo)體 PCA82C200 CAN 控制器 BasicCAN 的替代產(chǎn)品 而且 它增加了一種新的工作模式 PeliCAN ,
這種模式支持具有很多新特性的 CAN 2.0B 協(xié)議
2023-04-07 09:03:5113 今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計(jì),由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:302346 
會對檢測到的信號進(jìn)行處理,包括濾波、放大、轉(zhuǎn)換等操作,以提取出有用的信息,同時(shí)保證信號的準(zhǔn)確性和穩(wěn)定性。 3. 驅(qū)動信號輸出:根據(jù)檢測到的信號和控制要求,電機(jī)控制器會輸出相應(yīng)的驅(qū)動信號,控制電機(jī)的運(yùn)行速度、方向、加速度等參數(shù)
2023-06-02 15:47:3410065 經(jīng)緯恒潤作為國內(nèi)設(shè)計(jì)、生產(chǎn)商用車車身網(wǎng)絡(luò)控制器的供應(yīng)商,推出分布式網(wǎng)絡(luò)控制方案,實(shí)現(xiàn)整車的燈光、雨刮、門窗等電氣控制。整套產(chǎn)品目前已經(jīng)隨整車出口到歐洲、中東地區(qū),現(xiàn)已為一汽解放、中國重汽、陜汽重卡
2021-08-13 15:02:341258 
電子發(fā)燒友網(wǎng)站提供《基于Zigbee無線傳感器網(wǎng)絡(luò)的路燈區(qū)域控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-11-06 17:06:160 CAN總線為什么能在1Mbps上傳輸超過50M? CAN總線是一種被廣泛應(yīng)用于汽車和工業(yè)控制領(lǐng)域的串行通信協(xié)議。它可以提供高效、可靠和實(shí)時(shí)的通信,使得復(fù)雜的系統(tǒng)能夠?qū)崿F(xiàn)數(shù)據(jù)的傳輸和交流。然而,對于
2024-01-31 13:46:492194 總線限制最高速度為1Mbps的原因。 首先,CAN總線的設(shè)計(jì)目的決定了其最高速度。CAN總線是為了應(yīng)對工業(yè)控制和汽車領(lǐng)域的具體需求而設(shè)計(jì)的。在這些領(lǐng)域中,CAN總線主要用于傳輸實(shí)時(shí)控制信息和傳感器數(shù)據(jù),而不是大量的數(shù)據(jù)。因此,相比于高速數(shù)據(jù)傳輸,實(shí)時(shí)性是
2024-01-31 14:08:553333 CAN總線系統(tǒng)是現(xiàn)代工業(yè)自動化和汽車控制系統(tǒng)中常用的通信協(xié)議。在CAN總線系統(tǒng)中,CAN收發(fā)器和CAN控制器是兩個(gè)核心組件,它們各自扮演著不同的角色,共同確保數(shù)據(jù)的可靠傳輸。本文將詳細(xì)探討CAN收發(fā)器和CAN控制器的區(qū)別,包括定義、功能、結(jié)構(gòu)、工作原理及應(yīng)用等方面,以幫助讀者更好地理解這兩個(gè)組件。
2024-05-28 15:44:105496 運(yùn)動控制器就是控制電動機(jī)的運(yùn)行方式的專用控制器:比如電動機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動機(jī)拖動物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會停一會再轉(zhuǎn)一會再停
2024-07-10 08:40:161289 CAN總線控制器(Controller Area Network Bus Controller)是CAN總線通信系統(tǒng)中的核心部件,它扮演著接收、處理并轉(zhuǎn)發(fā)CAN總線數(shù)據(jù)的關(guān)鍵角色。下面將從CAN總線控制器的定義、功能、結(jié)構(gòu)、工作原理以及應(yīng)用等方面進(jìn)行詳細(xì)闡述。
2024-09-03 14:16:173267 能和穩(wěn)定性至關(guān)重要。 1. 了解CAN總線協(xié)議 在開始選擇CAN總線控制器之前,了解CAN總線的基本協(xié)議和特性是必要的。CAN總線是一種多主總線系統(tǒng),允許多個(gè)設(shè)備共享同一通信線路。它支持多種數(shù)據(jù)速率,從低速的10kbps到高速的1Mbps不等。了解這些基本特性有助于確定所需的CAN總線控制器
2024-11-12 09:48:101335 隨著科技的飛速發(fā)展,網(wǎng)絡(luò)語音控制器作為一種新興的技術(shù)產(chǎn)品,已經(jīng)在各個(gè)領(lǐng)域展現(xiàn)出了其巨大的應(yīng)用潛力和價(jià)值。網(wǎng)絡(luò)語音控制器是一種人機(jī)系統(tǒng)中以語言驅(qū)動的控制器,通過語音識別系統(tǒng)實(shí)現(xiàn)用戶的語音指令控制
2025-02-20 18:16:53884 MAX14882為隔離型高速CAN收發(fā)器,通過在器件的CAN協(xié)議控制器側(cè)(TDX、RXD)和CAN網(wǎng)絡(luò)(CANH、CANL)電纜側(cè)/收發(fā)器的總線側(cè)提供集成電隔離,有效改善通信和安全性。對于那些端口間
2025-05-27 09:19:18952 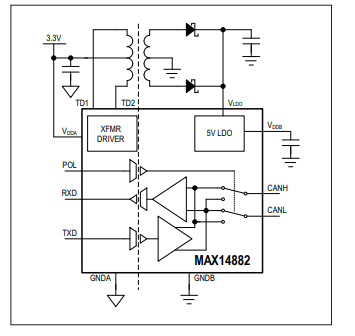
MAX3058/MAX3059用于將控制器區(qū)域網(wǎng)(CAN)的協(xié)議控制器連接至CAN總線的物理導(dǎo)線上。它們主要用于打印機(jī)和電信背板等需要1Mbps以上數(shù)據(jù)傳輸速率的應(yīng)用中。這些器件可以為總線和CAN控制器提供差分發(fā)送和差分接收功能。
2025-05-27 11:28:06748 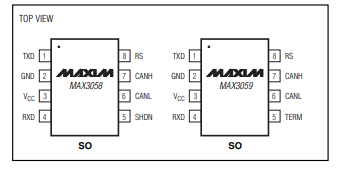
ADM3058E 是一款 5.7 kV rms 隔離式控制器區(qū)域網(wǎng)絡(luò) (CAN) 物理層收發(fā)器,具有高性能的基本功能集。ADM3058E 完全符合 CAN 靈活數(shù)據(jù)速率 (CAN FD) ISO 11898-2:2016 的要求,并且還能夠支持高達(dá) 12 Mbps 的數(shù)據(jù)速率。
2025-05-29 17:01:13769 
ADM3050E 是一款 5.7 kV rms 隔離式控制器區(qū)域網(wǎng)絡(luò) (CAN) 物理層收發(fā)器,具有高性能的基本功能集。ADM3050E 完全符合 CAN 靈活數(shù)據(jù)速率 (CAN FD) ISO 11898-2:2016 的要求,并且還能夠支持高達(dá) 12 Mbps 的數(shù)據(jù)速率。
2025-05-30 11:45:47969 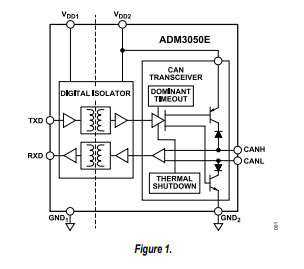
探索MAX3051:3.3V 1Mbps低功耗CAN收發(fā)器的卓越性能 在CAN(Controller Area Network)網(wǎng)絡(luò)的應(yīng)用中,選擇合適的收發(fā)器至關(guān)重要。今天,我們就來深入了解一款性能
2025-12-19 17:25:02518  電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論