機器人需要有一個控制系統,用硬件和軟件組成一個的控制系統。
2018-07-30 08:53:21 36100
36100 抓加緊電機等多種電機進行伺服控制。電機的種類和數量相對繁多,因此機器人控制系統相對比較復雜。本文主要研究了覆冰機器人的行走電機伺服控制。行走電機需要帶動機器人在線路上行走,當線路有較大覆冰時要帶動除冰
2011-09-28 17:47:13
第二章 機器人系統與控制需求簡介2.1 工業機器人的系統組成機械本體:精密減速機、伺服電機、伺服驅動器、控制系統(核心零部件)控制柜示教盒2.2 機器人本體結構與傳動方式簡介四大家族:ABB
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
1、機器人的控制系統“控制”的目的是使被控對象產生控制者所期望的行為方式。 .“控制”的基本條件是了解被控對象的特性。 “實質”是對驅動器輸出力矩的控制。2、機器人示教原理機器人的基本工作原理是示教
2021-09-13 08:40:55
視覺系統成為研究的新課題。1965年, Stanford建立機器人實驗室開始研究機器人。機器人的定義:【機器人】是一種可以用來移動材料,零件,工具或特定裝置的可以重新編程的多功能操...
2021-09-07 08:37:58
文中提出的TMS320DM6437+TMS320F28015的軟硬件設計方案在新型球形機器人控制系統中得到初步應用,驗證了理論設計的可行性和可靠性,實驗結果表明接口數據讀寫高效可靠。本設計對以后其他雙核控制系統接口的設計與研究工作具有很好的參考價值。
2021-05-27 06:46:44
的集中視覺足球機器人底層控制系統,簡化了系統設計, 滿足微型機器人的控制需要。同時, 也有利于足球機器人自主化的轉型和發展。
2009-03-28 14:03:25
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核心角色
2023-12-21 20:03:18
自動或半自動機器人常常需要嵌入式控制系統,從而能夠結合高度智能化的確定性控制,并且可以方便地連接到不同的傳感器和執行器上。NI提供了多種嵌入式硬件平臺,以滿足復雜系統的需求。從尖端的機器人研究項目直至高級行業應用,NI平臺被證實是高效的機器人解決方案。
2019-11-06 07:50:49
:設計一種基于ARM的智能清潔機器人控制系統。機器人能對未知的室內環境進行全面清掃具備避障和臺階檢測功能能實現電量管理自動返回充電。內容包括:1、基于單片機對直流電機的啟動、轉向、轉速、正反轉程序
2015-07-06 10:59:02
申請理由:采用DSP作為控制器,控制六軸工業機器人機械臂的運動。項目描述:本人研究生二年級,往算法控制方向進行研究。我的計劃是首先學習DSP,因此很是想擁有一個屬于自己的DSP開發板,也計劃著手用此
2015-09-10 11:15:16
申請理由:作為電子突出的杭州電子科技大學,由于項目需要,對國家級項目,機器人實現控制。主要通過使用DSP,STM32,FPGA三者協調,來實現對機器人實現軌跡規劃與速度規劃。項目描述:DSP在此
2015-11-02 11:18:53
,完全滿足研發的硬件需求。硬件開發經驗:曾采用DSP+ARM的方式開制作了六足機器人運動控制系統,使機器人能夠實現執行轉彎、蔽障和遠程遙控等各項功能。項目描述:1、開發板各模塊的硬件調試;2、編程實現
2015-07-24 17:18:31
一種小型移動機器人的控制系統研究
2012-08-20 15:53:10
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
ROVER C5 V0501 機器人控制系統采用國際流行的開放式軟硬件平臺,配以自主研發的避障控制卡、牽引運動卡及機器人內控專用編碼器和安全接口;
2019-09-12 09:00:12
上仍處于領先地位,而日本生產的工業機器人在數量、種類方面則居世界首位。工業機器人由主體、驅動系統和控制系統三個基本部分組成。主體即機座和執行機構,包括臂部、腕部和手部,有的機器人還有行走機構。大多數
2015-01-19 10:58:38
《先進機器人控制》從控制的角度系統地介紹了機器人學的基礎知識和當前的發展狀況。全書共分為12章,由基礎篇、控制結構篇和先進控制篇構成。基礎篇著重介紹串聯關節機器人的運動學、運動規劃和動力學。其中
2017-09-19 15:30:57
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-07-05 07:08:47
本文以6- PPPS并聯機器人為控制對象,以NI公司的系列軟硬件產品為基礎,依托國家自然基金(No. 30770538)的支持,快速開發了此并聯機器人的開放式數字控制系統。
2021-05-12 06:38:22
機器人聽覺系統主要是對人的聲音進行語音識別并做出判斷,然后輸出相應的動作指令控制頭部和手臂的動作,傳統的機器人聽覺系統一般是以PC機為平臺對機器人進行控制,其特點是用一臺計算機作為機器人的信息處理
2019-09-20 06:16:58
研究的前沿,它在一定程度上代表了一個國家的高科技發展水平。運動控制系統是機器人控制技術的核心,也是機器人研究領域的關鍵技術之一,在機器人控制中具有舉足輕重的地位,因此,各研究機構都把對機器人運動控制系統的研究作為首要任務。
2020-08-19 06:57:09
用CompactRIO和LabVIEW開發下一代機器人控制系統Author(s):Bill Miller - FIRST Frank Merrick - FIRSTKate Pilotte
2019-05-15 09:40:01
研究了一種用FPGA技術實現三輪全方位移動機器人運動控制系統的方法,與雙DSP結構,DSP+CPLD結構,以及DSP+專用集成電路結構等相比,該方法具有簡單可靠,擴展性強等特點。且FPGA設計簡單,使用方便,開發周期短,能夠實現真正的SOPC系統。
2019-10-22 07:35:19
本文概述了上海交通大學機器人研究所研制的新型遙控移動式排爆機器人PBJ-1的嵌入式控制系統固件的情況。利用嵌入式系統技術開發適合排爆等各類遙控地面移動機器人使用的嵌入式控制系統能夠解決上述種種矛盾。
2021-06-07 06:11:02
制造出像人一樣具有智能的能替代人類勞動的機器人,一直是人類的夢想,人類獲取的信息80%以上是通過視覺。因此,在智能機器人的研究中,具有視覺的機器人的研究也就成了第一位的。對機器人視覺伺服系統的研究是機器人領域中的重要內容之一,其研究成果可應用在機器人自動避障、軌跡跟蹤和運動目標跟蹤等問題中。
2019-09-27 08:07:35
樹莓派和其他機器人的控制器有何不同?如何使用樹莓派開發智能機器人控制系統?
2021-12-23 06:55:02
其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。其中上位機一般為PC機,下位機為單片機或DSP等微控制器。但隨著移動機器人的智能化,控制方法的發展,所需
2019-07-30 07:02:31
性能與可靠的機械控制性能的同時保證,才能在短時間內準確尋找到火源并滅火回家。在此以ARM9處理器為核心,對基于嵌入式系統的智能滅火機器人進行了設計。本文將從硬件和軟件方面講述智能滅火機器人控制器的實現方法,并且給出了機器人滅火的具體實驗,驗證了方案的可行性,為智能滅火機器人的進一步研究提供了平臺。
2019-07-31 06:23:18
移動機器人是一種能夠感知外部環境,在有障礙物的環境中能夠實現動態決策與規劃,從而完成避障等多種功能的綜合系統。機器人系統通常分為機構本體和控制系統兩部分,控制系統的作用是根據用戶的指令對機構本體進行
2020-03-06 07:07:07
隨著人口老齡化進程的加快,更多老年人,尤其是地震和疾病致殘的殘疾人,都需要照顧。基于此,這里提出一種基于ARM的嵌入式服務機器人控制系統設計。該服務機器人的控制系統是機器人的神經中樞,因而其設計是機器人研究的核心。該控制系統通常以MCU、 DSP等為核心,采用上、下位機二級分布式結構。
2019-10-15 08:03:16
最近在看工業機器人的資料,想知道現在的一些市面上的工業機器人上用的控制控制系統都有哪些廠商呀?
2015-01-23 12:04:01
機器人聽覺系統主要是對人的聲音進行語音識別并做出判斷,然后輸出相應的動作指令控制頭部和手臂的動作,傳統的機器人聽覺系統一般是以PC機為平臺對機器人進行控制,其特點是用一臺計算機作為機器人的信息處理
2019-08-21 07:51:24
機器人聽覺系統主要是對人的聲音進行語音識別并做出判斷,然后輸出相應的動作指令控制頭部和手臂的動作,傳統的機器人聽覺系統一般是以PC機為平臺對機器人進行控制,其特點是用一臺計算機作為機器人的信息處理
2019-08-30 08:23:42
如何去驗證電機的運動性能?怎樣去設計一種基于STM32F407ZGT6芯片控制板機器人的運動控制系統?
2021-06-29 08:34:12
教室節能控制系統研究
2013-01-18 21:01:51
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-06-30 06:37:34
隨著計算機科學和自動控制技術的發展,越來越多的不同種類的智能機器人出現在工廠、生活當中,機器人視覺系統作為智能機器人系統中一個重要的子系統,也越來越受到人們的重視。它涉及了圖像處理、模式識別和視覺
2020-04-07 07:27:24
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
移動機器人運動控制系統設計及控制算法研究
2012-08-20 15:54:16
視覺足球機器人底層控制系統,簡化了系統設計, 滿足微型機器人的控制需要。同時, 也有利于足球機器人自主化的轉型和發展。[hide][/hide]
2009-05-25 15:35:22
,年均增長31%,預計2023年我國工業機器人市場增速將在20%至25%左右,仍會維持較快的增速。 飛凌嵌入式作為一家專注嵌入式核心控制系統研發與制造的高新技術企業,經過多年的研發與積累,產品已廣泛應用
2023-02-24 17:05:21
論述了由嵌入式計算機組成的3 層仿人機器人控制系統,并詳細介紹了其中的關節控制器。控制系統實行逐級控制,任務分散,提高了機器人的智能化程度。關節控制器選用TM320F2811
2009-08-05 10:51:44 24
24 以IPC+DSP 作為六軸工業機器人的控制器, 設計了一種基于可編程多軸控制器PMAC(Programmable Multi-Axis Controller)的開放式機器人控制系統。系統采用雙微機分級控制方式和模塊化結構軟
2009-09-25 16:54:1339 針對北極冰下海洋參數監測的使命要求,對水下機器人控制系統進行了相關研究,將PC104 總線與CAN 總線應用到自主/遙控水下機器人中,實現了一種分布式與集中式相結合的水下
2009-12-19 15:21:1019 基于RTW 的DSP 控制系統研究
摘要 提出了一種基于RTW的TMS320F2812 DSP數字控制系統,基于模型的設計流程,實現了工程開發過程從算法設計到最終實現的所有開發階
2010-04-07 10:18:1737 針對覆冰機器人除冰時的電機特性,設計一種基于DSP的全數字化控制器,給出了硬件電路和部分軟件設計方案。該控制器采用DSP對機器人行走電機進行伺服控制,經過分析,該控制
2010-08-02 10:15:4818 基于CAN總線和雙傳感器仿人機器人運動控制系統研究
機器人研究是自動化領域最復雜。最具挑戰性的課題,它集機械。電子。計算機。材料。傳感
2009-10-10 08:57:291046 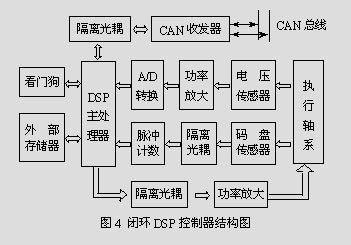
摘要:提出了一種基于AVR單片機Atmega8為核心控制器的比賽機器人控制系統,通過比賽機器人的特征分析,闡述了構成控制系統所需的主控單元、電機驅動單元、傳感檢測單元及LCD顯示單元,其中詳細分析了以MCBL3006S為核心的伺服電機驅動單元,以及關系比賽機器人基本
2011-02-11 15:06:5687 摘 要:基于機器人復雜的決策控制和步態管理,采用了個人數字助理(PDA)和數字信號處理器(DSP)組合,并以Windows Mobile作為軟件平臺。具體分析了控制系統的硬件設計和軟件設計方法。真實環境中的實驗及比賽結果證明,該控制系統可以實現機器人的復雜控制。 關鍵
2011-03-01 00:40:0460 對微型足球機器人低層控制系統進行了研究,給出了一種以87C196KC為核心輔以LM629運動控制器構成的雙閉環微型足球機器人低層控制系統.由于采用了集成運動控制芯片,不僅簡化了系統軟硬
2011-03-24 12:14:1557 介紹了分布式控制系統和CAN總線的概念和特性。提出了一種用于智能機器人的分布式控制系統結構,時基于該控昔對系統的智能機器人的體系結構、導航與控制、環境感知進行了研究。
2012-04-25 14:57:5355 機器人多傳感器測距系統研究與設計......
2015-12-23 14:46:4910 基于DSP的單相逆變電源智能控制系統研究
2016-03-28 15:19:227 基于DSP的清洗機器人模糊控制系統研究2008。
2016-04-05 10:30:1214 基于DSP的直線電機模糊PID控制系統研究與實現-2010。
2016-04-05 10:52:2219 基于DSP的SVPWM異步電機控制系統研究
2016-04-15 18:29:1613 基于DSP的直線電機模糊PID控制系統研究與實現,有興趣的同學可以下載學習
2016-04-26 18:16:4217 基于DSP的永磁平面電機運動控制系統研究,有興趣的同學可以下載學習
2016-04-26 18:16:4218 基于DSP的永磁同步電機控制系統研究,有興趣的同學可以下載學習
2016-04-27 15:28:3916 步進電機多軸聯動DSP控制系統研究,下來看看
2016-05-04 14:09:5630 基于DSP的直流無刷電機控制系統研究,下來看看
2016-05-05 11:37:3912 電子開發機器人相關教程資料——全自主移動機器人控制系統研究
2016-09-06 16:42:430 基于WiFi技術的風力機葉片覆冰監測系統研究_李錄平
2017-01-02 15:24:000 MTPA控制的直接轉矩控制系統研究
2017-01-21 11:54:3913 管道檢測機器人控制系統設計與運動研究_蔡輝
2017-03-19 11:30:431 在機器人學的研究領域中,如何有效地提高機器人控制系統的控制性能始終是研究學者十分關注的一個重要內容。在分析了工業機器人的發展歷程和機器人控制系統的研究現狀后,本論文的主要目標是針對四關節實驗室機器人
2017-09-01 11:25:4411 我們今天的文章:機器人控制技術詳解: 機器人控制系統的特點 機器人的結構采用空間開鏈接結構,其各個關節的運動是獨立的,為了實現末端點的運動軌跡,需要多關節的運動協調。所以,其控制系統要比普通的控制系統復雜得多
2017-09-19 18:29:2811 智能移動機器人集成了機械、電子、計算機、自動控制、人工智能等多學科的研究成果,在當前機器人研究領域具有突出地位。控制系統是機器人的核心部分,目前應用在機器人底層控制系統的微控制器主要有8/16位
2017-10-16 16:09:052 介紹了混聯機構的搬運碼垛機器人控制系統的設計與實現方法,根據工作現場的實際需求,對離線碼垛過程進行了研究,通過碼垛關鍵參數的輸入和碼垛空間判斷,建立離線編程的基礎,給出硬件控制系統采用工業PC
2017-10-17 16:59:2713 以特種變結構履帶式機器人為研究對象,結合機器人的結構特點和性能指標,搭建了基于STM32 的機器人控制系統。采用模塊化設計的思想和策略,針對特種變結構履帶式機器人的行進模塊和可變結構模塊進行了
2017-10-31 15:27:1730 弧焊機器人作為工業機器人中使用最為廣泛的一種機器人,其控制系統的研究一直是行業的熱點。針對常規示教再現型系統無法滿足復雜焊縫加工精度的問題,本文基于GUC-T嵌入式運動控制器設計了一套包括示教再現
2018-01-30 10:58:010 規律和跳躍機理。另外,單腿跳躍機器人的動態跳躍步態形式簡單,是研究足式機器人動態步態的理想平臺。 本文圍繞液壓驅動單腿跳躍機器人的控制器設計、豎直跳躍運動控制、機器人跳躍實驗這三個部分展開。主要工作包括:
2018-01-30 11:03:161 針對輪式移動機器人越障能力不足的問題,設計出了一種兼具輪式和足式移動機構特點的圓弧腿仿生六足機器人。完成了基于飛思卡爾MC568037型DSP及CAN總線的機器人控制系統的設計;對機器人的運動步態
2018-03-16 14:53:473 本文首先介紹了伺服運動控制系統主要特點,其次介紹了伺服運動控制系統工作原理,最后從機器人移動方式的選擇與結構設計、移動機器人運動控制系統及機器人的控制系統設計三個方面來詳細介紹機器人伺服運動控制系統設計,具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3617071 機器人控制系統是指由控制主體、控制客體和控制媒體組成的具有自身目標和功能的管理系統。控制系統意味著通過它可以按照所希望的方式保持和改變機器、機構或其他設備內任何感興趣或可變化的量。控制系統同時是為了使被控制對象達到預定的理想狀態而實施的。控制系統使被控制對象趨于某種需要的穩定狀態。
2018-12-17 14:28:4510959 以WMR- 1 型移動機器人為實驗對象, 應用Java 技術, 構建了包括HTTP 服務器、圖像服務器、機器人服務器和數據服務器的自主移動機器人遠程控制系統, 可以為Internet 上的遠程訪問及操作提供服務.
2019-03-05 17:22:005 機器人的控制系統,就相當于人體的大腦,是機器人的核心組成部分。關于機器人的控制系統有哪些分類呢?機器人控制系統按其控制方式可分集中控制系統、主從控制系統及分散控制系統,下面為大家詳細講講這些系統。
2019-11-04 08:45:3328258 的青睞,是當前機器人研究的的一個熱點問題。控制系統是整個足球機器人系統的核心,它既需要具有較強的信息獲取與處理分析能力,同時也必須具有較強的邏輯推理和決策能力。本文以 MiroSot(3:3)的足球機器人比賽為背景,對其
2020-04-07 08:00:0011 一種基于DSP與USB總線的新型開放式移動機器人控制系統,其機器人以PC為上位計算機,用一塊DSP運動控制卡對杋器人的兩個步進電杋進行控制。并釆用USB總線進行上下位機之間的通訊,很好地實現了機器人
2021-04-26 16:35:5121 針對輪式機器人運動能力的局限性程可視可控的履帶式機器人車體進行研究該系統采用DSP為控制核心,鋁合金配合伺服電機構成機器用直流電機配合履帶的移動方式,VC通過 zigbee向機器人發送指令,驅動機器
2021-05-11 09:51:2114 大家知道現在企業的生產效率為什么這么高嗎?是因為目前企業都使用工業機器人進行生產,工業機器人可以連續不間斷的生產,所以生產效率才會這么高。工業機器人是怎樣生產的呢?它有一個控制系統,現在來看一下工業機器人控制系統有哪幾種控制方式。
2021-05-18 15:38:409623 基于DSP無刷直流電機模糊控制系統研究(現代電源技術基礎課程)-該文檔為基于DSP無刷直流電機模糊控制系統研究總結文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-22 14:05:545 基于DSP的無刷直流電機模糊控制系統研究(開關電源技術支持)-該文檔為基于DSP的無刷直流電機模糊控制系統研究總結文檔,是一份不錯的參考資料,感興趣的可以下載看看,,,,,,,,,,,,,,,,,
2021-09-22 15:00:1110 用該操作步驟可將項目中的每個機器人控制系統分配給一個實際應用的機器人控制系統。然后,項目可從 WorkVisual 傳輸到實際應用的機器人控制系統中。
2023-03-08 11:20:267342 用該操作步驟可將項目中的每個機器人控制系統分配給一個實際應用的機器人控制系統。
2023-04-17 17:28:542779 工業機器人控制系統是工業機器人的核心組成部分,它負責接收輸入信號、處理信息、控制機器人的運動和執行任務。隨著工業自動化和智能制造的快速發展,工業機器人控制系統的重要性日益凸顯。本文將詳細介紹工業
2024-06-16 15:38:043207
 電子發燒友App
電子發燒友App













 工商網監
工商網監
評論