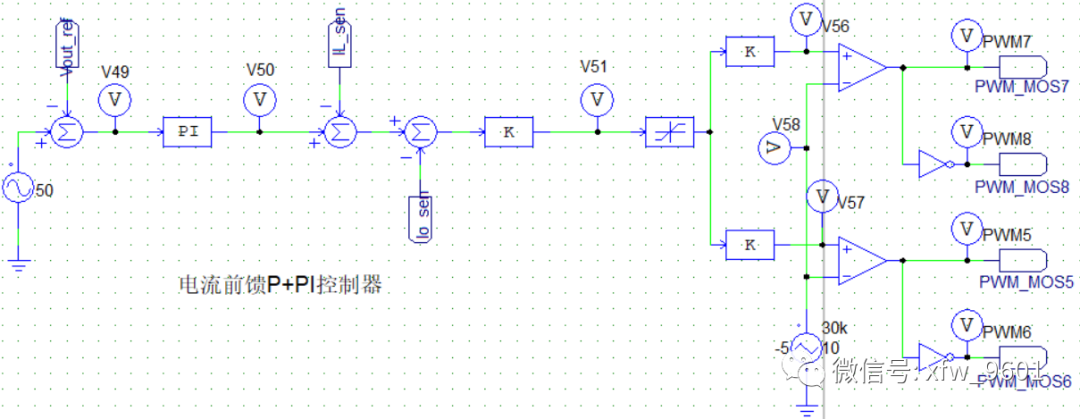
導(dǎo)讀:首先需要說(shuō)明的是PI電流調(diào)節(jié)器和無(wú)差拍電流預(yù)測(cè)控制器的作用都是為了求得電壓參考指令作為脈寬調(diào)制SVPWM模塊的輸入。本期文章以傳統(tǒng)的PI和復(fù)矢量PI調(diào)節(jié)器與無(wú)差拍電流預(yù)測(cè)控制器作為分析對(duì)象,進(jìn)行控制性能對(duì)比。
2022-09-19 09:26:22 10961
10961 PI控制器筆記PI:Proportion Integration, 比例積分法;##2電機(jī)的電流閉環(huán)控制:I_target是目標(biāo)控制量,即要達(dá)到的值;I_feedback是電流反饋(通過(guò)電流采樣回采
2021-09-07 09:12:41
前言電機(jī)控制中,使用最多的就是PI控制器了,因?yàn)镈參數(shù)通常使用不多。我打算以PMSM雙環(huán)控制為例,對(duì)傳統(tǒng)的PI控制進(jìn)行分析。下面是看到的一段PI控制器的介紹按偏差的比例(P)、積分(I)和微分(D
2021-08-27 06:10:30
本人大學(xué)和研究生學(xué)的控制,大學(xué)做的飛思卡爾智能車,畢業(yè)后做的風(fēng)電上的變頻器控制,現(xiàn)在在計(jì)算機(jī)系當(dāng)老師。先回答問(wèn)題,我所看到的,最驚艷的控制算法就是PI控制器,沒(méi)有之一,簡(jiǎn)約極致之美。下面慢...
2021-09-09 07:02:53
FOC電機(jī)控制中D、Q軸都要用到PI調(diào)節(jié)器,PI調(diào)節(jié)器的輸入為D/Q軸的電流誤差(給定電流-實(shí)際電流),經(jīng)過(guò)一個(gè)PI環(huán)節(jié)后,輸出為D/Q軸的控制電壓。我們知道,D/Q軸電壓要受到電壓橢圓的限制,速度
2021-08-27 07:58:47
前言有時(shí)候我們都不會(huì)把PID三個(gè)控制都用上,可能之后用其中的P、PI或PD控制。P控制就不用說(shuō)了,什么時(shí)候都能用,只是性能的問(wèn)題。本文將基于平衡小車分析什么時(shí)候使用PI和PD控制器。
2021-09-07 08:30:33
,
前饋過(guò)大會(huì)導(dǎo)致速度環(huán)的給定出現(xiàn)波動(dòng),電機(jī)出現(xiàn)高頻震動(dòng)。1,位置環(huán)一般怎么設(shè)計(jì)?很多論文上面說(shuō)
電流環(huán)(ACR)、速度環(huán)(ASR)一般使用
PI調(diào)節(jié)
器,位置環(huán)適用
P調(diào)節(jié)
器即可,這種說(shuō)法其實(shí)不夠嚴(yán)謹(jǐn),因?yàn)?/div>
2021-06-28 08:15:44
(b) 圖2:P通道控制器的柵極驅(qū)動(dòng) 非同步P通道控制器導(dǎo)出其偏置電源以驅(qū)動(dòng)P通道柵極,可帶來(lái)巨大的效益,并且可能實(shí)現(xiàn)提供懸浮在0V電位以上的虛擬接地。對(duì)于N通道高側(cè)MOSFET,電壓來(lái)自接地
2019-03-18 06:45:05
描述LM5122MHX同步整流升壓模塊LM5122是一款具有多相功能的同步升壓控制器,適用于高效同步升壓穩(wěn)壓器應(yīng)用。該控制方法基于峰值電流模式控制。電流模式控制提供固有的線路前饋、逐周期電流限制
2022-08-17 06:59:44
前饋,通過(guò)前饋提高動(dòng)態(tài)響應(yīng),其系統(tǒng)結(jié)構(gòu)如圖1所示;二是嵌入式重復(fù)控制,它在重復(fù)控制器側(cè)加入PI調(diào)節(jié)器,通過(guò)PI調(diào)節(jié)來(lái)提高動(dòng)態(tài)性能,其系統(tǒng)結(jié)構(gòu)如圖2所示。 基于內(nèi)模原理的理想重復(fù)控制系統(tǒng)的前向通道
2015-12-31 14:15:33
PID控制器的基本原理是什么?PI-PD控制器的結(jié)構(gòu)是怎樣構(gòu)成的?基于PI-PD控制器的四旋翼姿態(tài)控制方式有什么優(yōu)點(diǎn)?
2021-07-22 08:41:15
親愛(ài)的各位,我正在努力實(shí)現(xiàn)一個(gè)功率轉(zhuǎn)換器的PI控制器。附圖是我想在PSOC-5LP上實(shí)現(xiàn)的模擬部分的示意圖。問(wèn)題是PI的opAMPSORT是-VE,PSOC中的opAMP不支持VE電壓。在這方面的任何幫助都將得到贊賞。PSoC PI.JPG176.1 K
2019-11-01 09:33:29
表貼式永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器參數(shù)的調(diào)試過(guò)程是怎樣的?
2021-09-23 06:35:41
傅里葉變換的線性和時(shí)間偏移特性,在考慮前饋補(bǔ)償器時(shí),對(duì)于每個(gè)分解函數(shù),在特定頻率下乘以增益和相位是有意義的。因此,輸出電壓紋波可以擴(kuò)展為傅里葉級(jí)數(shù)。在定義輸出電壓紋波的穩(wěn)態(tài)方程之前,應(yīng)該實(shí)現(xiàn)電感電流。在高側(cè)
2018-05-23 16:55:47
怎樣去調(diào)試永磁同步電機(jī)FOC矢量控制中電流環(huán)PI控制器的參數(shù)?如何對(duì)Iq,Id進(jìn)行PID控制器的參數(shù)整定?
2021-09-23 09:12:48
前饋技術(shù)的基本原理是什么?怎樣對(duì)前饋放大器進(jìn)行計(jì)算機(jī)模擬仿真 ?
2021-04-22 06:18:13
新電流模式 PWM 控制器支持升壓、反向、SEPIC 和 LED 驅(qū)動(dòng)器應(yīng)用!
2014-02-20 17:53:19
摘要:研究了一種基于專家系統(tǒng)的單神經(jīng)元PI控制器,并將其應(yīng)用于無(wú)刷直流電機(jī)調(diào)速系統(tǒng)中。控制器實(shí)現(xiàn)了PI參數(shù)的在線調(diào)整,在具有PID控制器良好動(dòng)態(tài)性能的同時(shí),減少微分項(xiàng)對(duì)系統(tǒng)穩(wěn)態(tài)運(yùn)行時(shí)的影響,并較好
2025-06-26 13:34:07
永磁同步電機(jī)偏差解耦與電流前饋解耦控制對(duì)比分析,哪個(gè)影響大?
2021-10-12 10:17:23
魯棒性較強(qiáng),但是動(dòng)態(tài)性能受到影響。電流前饋補(bǔ)償魯棒性較弱,但是動(dòng)態(tài)性能受影響較小。下一步準(zhǔn)備調(diào)調(diào)偏差解耦的PI參數(shù),看看動(dòng)態(tài)性能能不能有所改善。...
2021-06-28 06:08:05
在異步電機(jī)矢量控制中,磁鏈的給定值怎么計(jì)算?我怎么知道我這個(gè)磁鏈的給定值應(yīng)該設(shè)置成多少??在電流控制器后一個(gè)電壓的前饋解耦環(huán)節(jié)?不說(shuō)很清楚解耦環(huán)節(jié)的公式怎么來(lái)的?不知道有哪位朋友能夠提供思路或者提供在這兩個(gè)問(wèn)題上講得比較清楚的文檔?
2016-11-23 20:54:55
(PWM)控制器采用電流模式控制實(shí)現(xiàn)高效離線式單端反激/正激電源轉(zhuǎn)換器的應(yīng)用。VIN 高壓供電端口實(shí)現(xiàn)超低啟動(dòng)電流(小于5uA),啟動(dòng)電壓 20V,欠壓鎖定電壓 7.6V,在一定啟動(dòng)時(shí)間下最大程度地降低
2022-08-18 18:36:42
的設(shè)計(jì)滑模控制的轉(zhuǎn)速控制器為了進(jìn)一步將滑模控制器應(yīng)用到雙閉環(huán)矢量控制中去,為此搭建如下仿真模型并進(jìn)行仿真分析。并且對(duì)比小論文的改進(jìn)效果,在此將仿真結(jié)果圖2-4,分析仿真結(jié)果產(chǎn)生變化的原因。假定電流環(huán)均都是PI控制器,人為已經(jīng)是整定至最佳的狀態(tài),從而來(lái)考量改進(jìn)的效果與創(chuàng)新點(diǎn)。圖1 轉(zhuǎn)速環(huán)為滑模控制的矢量控
2021-09-07 07:02:53
做一個(gè)參考,歡迎積極指教討論。由于剛接觸ADRC,覺(jué)得線性的ADRC要比非線性ADRC簡(jiǎn)單,按照PI控制器矢量控制中的調(diào)試順序,依然先調(diào)試電流環(huán)再調(diào)試速度環(huán),電流環(huán)采用的一階線性ADRC,仿真模型如下除了ADRC模塊,其余模塊的已在PI矢量控制中得到驗(yàn)證。ADRC控制器模塊待調(diào)節(jié)參數(shù)有線性微分跟蹤器(LTD
2021-08-27 06:55:33
電壓前饋解耦是什么?電壓前饋解耦是如何實(shí)現(xiàn)的?
2021-10-15 06:55:58
沒(méi)做項(xiàng)目,還真的體會(huì)不到。總是在想,這有用嗎?
通過(guò)這個(gè)項(xiàng)目,真正體會(huì)到設(shè)定值通道的前饋控制有多么重要。如果沒(méi)有前饋,調(diào)到實(shí)時(shí)的跟蹤目標(biāo)給定值,是困難的。有了這個(gè)前饋的觀測(cè)模型。即可把跟蹤軸的速度軌跡鎖定在被跟蹤軸的轉(zhuǎn)速軌跡上,如果超調(diào)了,通過(guò)減小前饋強(qiáng)度和提高速度調(diào)節(jié)器的P參數(shù)來(lái)配合搞定。
2023-11-02 07:05:51
FOC電流環(huán)PI控制器出來(lái)后為什么是電壓?整定參數(shù)跟電機(jī)參數(shù)有關(guān)系嗎?
2021-10-13 08:17:06
您好 Daniel,amclib 文檔中提到了“遞歸”PI 控制器形式,但似乎該行業(yè)的術(shù)語(yǔ)與基于神經(jīng)網(wǎng)絡(luò)的 PID 有關(guān)。我懷疑 AMClib 是這種情況。您能否解釋一下 amclib 中 PI 控制器的“標(biāo)準(zhǔn)遞歸形式”到底是什么?這種形式和常見的平行形式有什么區(qū)別?
2025-04-03 07:05:06
誰(shuí)能幫我截幾張平衡小車PI控制器和PD控制器調(diào)節(jié)時(shí)候的波形圖啊。救急一下啊- -。PF控制器:(1)KD=0KP=200;(2)KD=0KP=300;(3)KD=0KP=500;(4)KD=0.5
2019-02-26 02:48:34
針對(duì)工業(yè)過(guò)程中常見的大純滯后現(xiàn)象,提出了一種由模糊神經(jīng)網(wǎng)絡(luò)控制(FNNC)與傳統(tǒng)PI相結(jié)合的復(fù)合控制器(FNNC -PI)。由該控制器構(gòu)成的改進(jìn)Smith預(yù)估補(bǔ)償控制器(Smith一FNNC一PI),將模糊
2009-03-13 11:19:33 32
32 本文分析和設(shè)計(jì)了一種針對(duì) LC 輸出濾波的單相并網(wǎng)逆變器控制方案。該方案采用帶電網(wǎng)電壓前饋解耦的數(shù)字 PI 控制,并結(jié)合輸出濾波電容電流補(bǔ)償以及數(shù)字鎖相環(huán)實(shí)現(xiàn)并網(wǎng)電流的間
2009-04-08 14:52:0438 本文介紹了一種以PLC 為核心的鋁板初軋機(jī)自動(dòng)位置控制系統(tǒng)中控制器的設(shè)計(jì)方法,對(duì)傳統(tǒng)的PI 調(diào)節(jié)器和Fuzzy 控制器分別進(jìn)行了理論分析和仿真研究,給出了系統(tǒng)的軟、硬件結(jié)構(gòu),PLC
2009-06-24 09:34:059 水工模型水位控制系統(tǒng)是一個(gè)典型的非線性、大時(shí)滯控制系統(tǒng),采用P - FUZZY - PI 復(fù)合控制器對(duì)其進(jìn)行控制,既利用了模糊控制適應(yīng)能力強(qiáng),動(dòng)態(tài)特性好,抗干擾能力強(qiáng)的特點(diǎn),又利
2009-07-09 15:57:4612 針對(duì)熱工過(guò)程中的存在的滯后環(huán)節(jié),本文提出一種結(jié)合模糊和PID 的前饋——反饋預(yù)估控制方法,該前饋預(yù)估補(bǔ)償與系統(tǒng)的純滯后時(shí)間無(wú)關(guān),特別適合于因?yàn)槿鄙贉髸r(shí)間信息導(dǎo)致
2009-08-10 09:41:2527 在三相電壓型PWM 整流器中,輸入電流受電網(wǎng)電壓等外部因素的影響而變差。為抑制這種影響,本文通過(guò)對(duì)三相PWM 整流器的小信號(hào)分析,得到了提高電流品質(zhì)的電流環(huán)前饋單元。并通
2010-02-18 23:32:4043 為分析基于LCL濾波器的雙饋風(fēng)電網(wǎng)側(cè)變換器在不同電流反饋控制結(jié)構(gòu)情況下的工作性能, 采取PI控制器對(duì)網(wǎng)側(cè)變換器網(wǎng)側(cè)電流反饋控制結(jié)構(gòu)和變換器側(cè)電流反饋控制結(jié)構(gòu)的電流閉
2010-09-26 16:58:3414 本內(nèi)容共整合了21篇關(guān)于功放設(shè)計(jì)的文章,現(xiàn)簡(jiǎn)單介紹其中一篇《前饋功放線性化技術(shù)的研究》 供大家參考 前饋功放線性化技術(shù)的研究 文摘將前饋功放線性化的過(guò)補(bǔ)償方法與傳統(tǒng)方法相比,過(guò)補(bǔ)償前饋方法不但縮小了電路的尺寸,降低了成本, 而且提高了整個(gè)功放系
2011-03-16 16:33:27124 介紹了基于導(dǎo)頻檢測(cè)技術(shù)的前饋射頻功放線性化技術(shù), 從理論上簡(jiǎn)單地分析了前饋功放以及利用導(dǎo)頻信號(hào)自適應(yīng)控制前饋功放的原理。利用導(dǎo)頻法控制前饋有很多地電路結(jié)構(gòu), 包括導(dǎo)頻跳
2011-05-20 15:22:4843 為解決污水處理過(guò)程中非線性、大時(shí)滯及干擾嚴(yán)重的問(wèn)題,提出一種將模糊控制器和前饋控制器相接合的控制方法。其中在建立前饋控制器時(shí),提出了使用神經(jīng)網(wǎng)絡(luò)建立前饋控制器的新
2012-08-29 15:15:3443 一種基于直流電壓前饋控制的逆變電源,下來(lái)看看。
2016-03-31 09:29:5833 前饋控制在復(fù)卷機(jī)調(diào)速系統(tǒng)中的應(yīng)用,下來(lái)看看
2016-05-03 09:38:544 對(duì)基于前饋控制的有源電力濾波器的研制有一個(gè)基本介紹
2016-05-10 11:49:020 介紹帶監(jiān)督項(xiàng)的模糊前饋反饋控制在船用鍋爐水位控制中應(yīng)用的基本知識(shí)
2016-05-10 11:49:020 改進(jìn)ACO算法優(yōu)化的PI控制器在直流輸電控制中的應(yīng)用_王振浩
2017-01-04 16:45:450 控制系統(tǒng)的分?jǐn)?shù)階建模及分?jǐn)?shù)階PI_D_控制器設(shè)計(jì)_鄧立為
2017-01-07 18:12:515 區(qū)間二型模糊PI_PD控制器設(shè)計(jì)與結(jié)構(gòu)分析_雷賓賓
2017-01-08 11:44:0611 和電壓第二限制可編程線欠壓鎖定 可編程平均電流限制平衡內(nèi)部熱關(guān)機(jī)保護(hù) 半橋電容分壓器電壓可調(diào)軟啟動(dòng) 過(guò)載條件直接光耦合接口 可編程打嗝模式定時(shí)器減少5V參考輸出連續(xù)功耗 描述 lm5039半橋柵極驅(qū)動(dòng)器/控制器包含所有必要的功能來(lái)實(shí)現(xiàn)半橋采用線電壓前饋的電壓
2017-06-08 15:26:5632 PI調(diào)節(jié)器是一種線性控制器,它根據(jù)給定值與實(shí)際輸出值構(gòu)成控制偏差,將偏差的比例(P)和積分(I)通過(guò)線性組合構(gòu)成控制量,對(duì)被控對(duì)象進(jìn)行控制。
2017-08-03 15:38:3966054 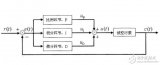
根據(jù)伺服系統(tǒng)的特點(diǎn)并結(jié)合PID控制算法設(shè)計(jì)了一種位置前饋控制器
2017-09-16 09:08:2120 針對(duì)在光伏并網(wǎng)系統(tǒng)中采用單純 PI 控制的缺點(diǎn),提出了增加電網(wǎng)電壓前饋控制來(lái)改善并網(wǎng)電流波形。分析了引入電網(wǎng)電壓前饋控制會(huì)減小并網(wǎng)電流與電網(wǎng)電壓之間相位差并降低并網(wǎng)電流總諧波畸變系數(shù)的原理。 仿真
2017-12-08 14:45:5862 表達(dá)式。根據(jù)期望的系統(tǒng)要求,從時(shí)域分析入手,對(duì)電流環(huán)和速度環(huán)分別構(gòu)建性能評(píng)價(jià)函數(shù),通過(guò)迭代給定激勵(lì)信號(hào)下的最小評(píng)價(jià)函數(shù)值,學(xué)習(xí)性能最優(yōu)的開環(huán)截止頻率,從而實(shí)現(xiàn)電流環(huán)和速度環(huán)PI控制器參數(shù)整定。對(duì)拖伺服平臺(tái)上的實(shí)驗(yàn)結(jié)果
2017-12-29 15:34:543 在基于電流源型變換器的永磁同步風(fēng)力發(fā)電系統(tǒng)( CSC-PMSG-WGS)控制中,比例積分( PI)控制依然是廣泛采用的基本控制方法。傳統(tǒng)PI參數(shù)設(shè)計(jì)方法由于采用諸多近似計(jì)算而使得設(shè)計(jì)結(jié)果不準(zhǔn)確,或是
2018-01-03 15:14:361 高性能永磁同步電機(jī)伺服系統(tǒng)要求有快速響應(yīng)的電流內(nèi)環(huán)以保證系統(tǒng)的高動(dòng)態(tài)性能,傳統(tǒng)PI調(diào)節(jié)器容易出現(xiàn)超調(diào)及振蕩調(diào)整過(guò)程。為實(shí)現(xiàn)對(duì)高性能永磁同步電機(jī)伺服系統(tǒng)電流環(huán)的精確控制,采用自抗擾控制器代替?zhèn)鹘y(tǒng)PI
2018-01-14 15:33:247 AGV在工業(yè)自動(dòng)化生產(chǎn)線中適應(yīng)性、柔性好,可穩(wěn)定實(shí)現(xiàn)生產(chǎn)和搬運(yùn)功能,因此被廣泛應(yīng)用。為解決AGV小車的魯棒位置偏差控制問(wèn)題,模糊控制也被廣泛使用,但模糊控制器難以根據(jù)系統(tǒng)特性進(jìn)行自適應(yīng)的調(diào)整,容易
2018-01-22 15:46:0714 雙凸極永磁電機(jī)轉(zhuǎn)矩和轉(zhuǎn)速之間具有強(qiáng)烈的非線性關(guān)系,采用常規(guī)線性PI控制器難以得到令人滿意的控制特性,為此根據(jù)PI控制器各參數(shù)在調(diào)節(jié)過(guò)程中的不同作用,提出了適于單片機(jī)上實(shí)現(xiàn)的變參數(shù)PI控制模型,并用
2018-02-09 10:52:460 在永磁同步電機(jī)調(diào)速系統(tǒng)中,傳統(tǒng)PI控制的階躍響應(yīng)存在超調(diào)的問(wèn)題。采用IP控制雖可消除超調(diào),但會(huì)使系統(tǒng)響應(yīng)變慢。為此,提出帶給定增益的PI控制器,在傳統(tǒng)PI控制器的基礎(chǔ)上,引入輸入微分前饋,將誤差比例
2018-03-13 16:27:301 G120系列變頻器支持轉(zhuǎn)速控制器前饋控制功能,該功能可以增強(qiáng)變頻器的動(dòng)態(tài)響應(yīng)。當(dāng)速度設(shè)定值發(fā)生變化時(shí),變頻器會(huì)計(jì)算所需的轉(zhuǎn)矩,并將該轉(zhuǎn)矩值直接加在速度控制的輸出,降低了速度PID調(diào)節(jié)的滯后性,增加變頻器的動(dòng)態(tài)響應(yīng)。
2018-03-15 14:47:0112 針對(duì)采用傳統(tǒng)PI電流調(diào)節(jié)器的永磁同步電機(jī)(PMSM)矢量控制系統(tǒng)中電流環(huán)相互耦合問(wèn)題,設(shè)計(jì)了以反饋電流為輸入的電壓前饋補(bǔ)償型電流調(diào)節(jié)器。在Matlab/Simulink環(huán)境下分別搭建了采用兩種
2018-06-01 11:45:5212 的電磁兼容性。文章介紹了利用電流前饋調(diào)節(jié)和電壓補(bǔ)償法提高電動(dòng)汽車用內(nèi)埋式永磁同步電機(jī)(IPMSM)控制器的控制性能和電磁兼容性的方法,在控制算法中增加了電流前饋調(diào)節(jié)和電壓補(bǔ)償環(huán)節(jié),并利用MATLAB/Simulink對(duì)系統(tǒng)的控制算法
2018-06-01 11:54:3234 賦予舊的電機(jī)新的技巧1.5:電機(jī)控制,PI控制器,PID控制器和現(xiàn)場(chǎng)定向控制簡(jiǎn)介
2018-08-16 01:40:0017439 賦予舊的電機(jī)新的技巧1.1:電機(jī)控制,PI控制器,PID控制器和現(xiàn)場(chǎng)定向控制簡(jiǎn)介
2018-08-21 01:27:007483 簡(jiǎn)單說(shuō)來(lái),PI控制器各校正環(huán)節(jié)的作用如下::即時(shí)成比例的反映控制系統(tǒng)的偏差信號(hào),偏差一旦產(chǎn)生,控制器立即產(chǎn)生控制作用,以減少偏差。通常隨著值的加大,閉環(huán)系統(tǒng)的超調(diào)量加大,系統(tǒng)響應(yīng)速度加快,但是當(dāng)增加到一定程度,系統(tǒng)會(huì)變得不穩(wěn)定。
2019-01-07 15:03:2119568 動(dòng)態(tài)特性對(duì)機(jī)器人的運(yùn)動(dòng)精度有著重要的影響,動(dòng)態(tài)前饋控制是降低這種影響的有效途徑。然而,在工業(yè)伺服系統(tǒng)中實(shí)現(xiàn)精確的動(dòng)態(tài)前饋控制和確定前饋系數(shù)是困難的。提出了一種大工作空間和時(shí)變動(dòng)力學(xué)的飛機(jī)機(jī)翼噴漆
2019-04-09 08:00:001 四旋翼姿態(tài)控制通常選用 PID控制器作為主控環(huán)節(jié),但 PID 控制器的參數(shù)不易整定,調(diào)控結(jié)果也存在較大的系統(tǒng)超調(diào)量,難以獲得滿意的控制效果。因此設(shè)計(jì)了 PI-PD 控制器的四旋翼姿態(tài)控制方式,其中
2019-08-16 09:16:007180 通過(guò)分析三相脈寬調(diào)制(PWM)整流器在d-q旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型,設(shè)計(jì)了具有前饋解耦控制的PWM整流器雙閉環(huán)控制系統(tǒng)。根據(jù)系統(tǒng)對(duì)電流內(nèi)環(huán)的控制要求設(shè)計(jì)電流比例積分(PI)調(diào)節(jié)器,提出按閉環(huán)幅頻特性
2019-12-06 17:27:0022 AN-2199013:PI控制器的實(shí)現(xiàn)
2021-05-21 10:21:002 大家好,我是黃前久美子的老公Dantemiwa。寫這篇文章的目的有二:首先,知乎上曾經(jīng)看到有人問(wèn)過(guò)這個(gè)問(wèn)題:永磁同步電機(jī)控制中,速度環(huán)與電流環(huán),pi參數(shù)計(jì)算。??www.zhihu.com其實(shí)關(guān)于
2021-11-08 13:51:036 為實(shí)現(xiàn) 的完全解耦,將耦合造成的影響降到最低,需要給電流環(huán)增加前饋補(bǔ)償環(huán)節(jié)。目前傳統(tǒng)的矢量控制常見的方法有 控制和最大轉(zhuǎn)矩電流比控制,前者主要適用于表貼式三相永磁同步電機(jī),后者主要用于內(nèi)置式三相
2023-03-14 13:55:307 電機(jī)控制中,使用最多的就是PI控制器了,因?yàn)镈參數(shù)通常使用不多。我打算以PMSM雙環(huán)控制為例,對(duì)傳統(tǒng)的PI控制進(jìn)行分
析。
下面是看到的一段PI控制器的介紹
按偏差的比例(P)、積分(I
2023-03-14 11:43:280 控制方式主要可分為反饋控制和前饋控制兩類。通常,我們的注意力集中在反饋控制上,因?yàn)榉答?b class="flag-6" style="color: red">控制可以穩(wěn)定系統(tǒng)并同時(shí)滿足一些魯棒性要求以及飽和限制。
2023-06-30 16:50:3132316 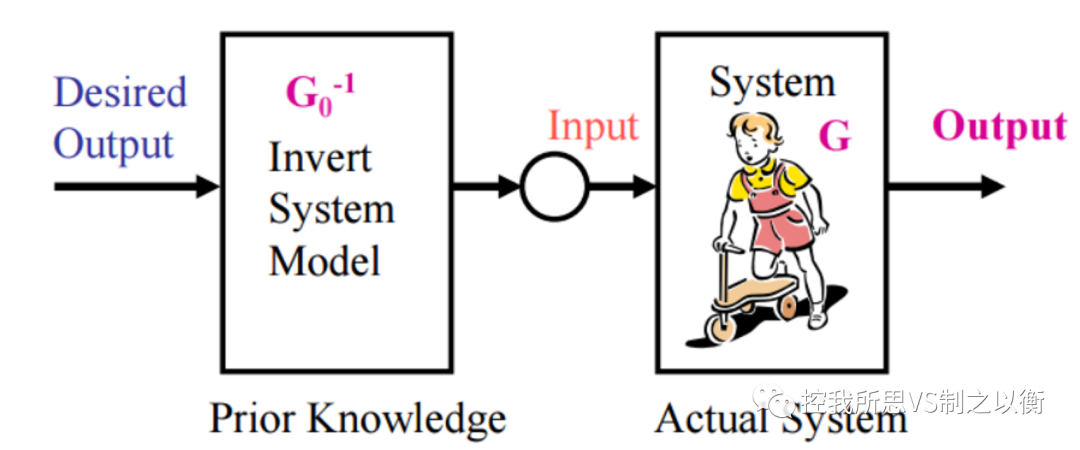
PI調(diào)節(jié)器是一種常見的控制系統(tǒng)反饋控制器,用于調(diào)節(jié)系統(tǒng)。在PI調(diào)節(jié)器中,P代表比例控制作用,I代表積分控制作用。
2023-08-01 17:01:5624284 在工業(yè)控制系統(tǒng)中,控制器是實(shí)現(xiàn)對(duì)被控對(duì)象進(jìn)行調(diào)節(jié)和控制的重要設(shè)備。
2023-12-31 17:34:004824 電子發(fā)燒友網(wǎng)站提供《具有電壓前饋功能的TPS40077 4.5V 至 28V 輸入、電壓模式、同步降壓控制器數(shù)據(jù)表.pdf》資料免費(fèi)下載
2024-04-10 10:58:480 電子發(fā)燒友網(wǎng)站提供《帶電壓前饋的高效中端輸入同步降壓控制器TPS4007x數(shù)據(jù)表.pdf》資料免費(fèi)下載
2024-04-10 14:42:390 電子發(fā)燒友網(wǎng)站提供《帶電壓前饋的中端輸入同步降壓控制器TPS40074數(shù)據(jù)表.pdf》資料免費(fèi)下載
2024-04-11 11:13:180 LM5121是一款針對(duì)高效率、高功率升壓穩(wěn)壓器應(yīng)用的同步升壓控制器。此控制方法基于峰值電流模式控制。電流模式控制可提供固有線路前饋和逐周期電流限制,并且方便進(jìn)行環(huán)路補(bǔ)償。
2024-04-24 15:54:431 在工業(yè)自動(dòng)化領(lǐng)域中,控制系統(tǒng)是確保生產(chǎn)過(guò)程穩(wěn)定、高效運(yùn)行的關(guān)鍵。其中,前饋控制系統(tǒng)和反饋控制系統(tǒng)是兩種常見的控制策略。它們各自具有獨(dú)特的工作原理和優(yōu)勢(shì),適用于不同的應(yīng)用場(chǎng)景。本文將對(duì)前饋控制系統(tǒng)和反饋控制系統(tǒng)的區(qū)別進(jìn)行詳細(xì)探討,以期為讀者提供更深入的理解。
2024-06-17 11:45:128176 PI調(diào)節(jié)器,即比例-積分調(diào)節(jié)器,是一種廣泛應(yīng)用于工業(yè)控制系統(tǒng)中的控制器。它通過(guò)比例(P)和積分(I)兩個(gè)參數(shù)的調(diào)整,實(shí)現(xiàn)對(duì)系統(tǒng)輸出的精確控制。以下是關(guān)于PI調(diào)節(jié)器的詳細(xì)介紹: 一、PI調(diào)節(jié)器
2024-06-30 10:43:308430 Neural Network, FCNN)和前饋神經(jīng)網(wǎng)絡(luò)(Feedforward Neural Network, FNN)因其結(jié)構(gòu)簡(jiǎn)單、易于理解和實(shí)現(xiàn),成為了研究者們關(guān)注的熱點(diǎn)。本文將從概念、模型結(jié)構(gòu)、優(yōu)缺點(diǎn)以及應(yīng)用場(chǎng)景等方面,對(duì)全連接前饋神經(jīng)網(wǎng)絡(luò)與前饋神經(jīng)網(wǎng)絡(luò)進(jìn)行詳細(xì)比較,并探討其實(shí)際應(yīng)用。
2024-07-09 10:31:1325363 要使用NumPy實(shí)現(xiàn)一個(gè)前饋神經(jīng)網(wǎng)絡(luò)(Feedforward Neural Network),我們需要從基礎(chǔ)開始構(gòu)建,包括初始化網(wǎng)絡(luò)參數(shù)、定義激活函數(shù)及其導(dǎo)數(shù)、實(shí)現(xiàn)前向傳播、計(jì)算損失函數(shù)、以及實(shí)現(xiàn)
2024-07-11 16:30:245183 電流控制器的調(diào)節(jié)是電子設(shè)備和電力系統(tǒng)中一個(gè)至關(guān)重要的環(huán)節(jié)。正確調(diào)節(jié)電流控制器不僅可以確保設(shè)備的正常運(yùn)行,提高系統(tǒng)的效率和穩(wěn)定性。下面,我們將詳細(xì)探討電流控制器的調(diào)節(jié)方法,并結(jié)合具體的應(yīng)用場(chǎng)景進(jìn)行說(shuō)明
2024-12-25 16:19:284008 LM25117 是一款同步降壓控制器,適用于采用高壓或?qū)捵兓斎腚娫吹慕祲悍€(wěn)壓器應(yīng)用。該控制方法基于利用仿真電流斜坡的電流模式控制。電流模式控制提供固有的線路前饋、逐周期電流限制和輕松的環(huán)路補(bǔ)償。使用仿真控制斜坡降低了脈寬調(diào)制電路的噪聲靈敏度,從而能夠可靠地控制高輸入電壓應(yīng)用中所需的非常小的占空比。
2025-03-27 15:36:53687 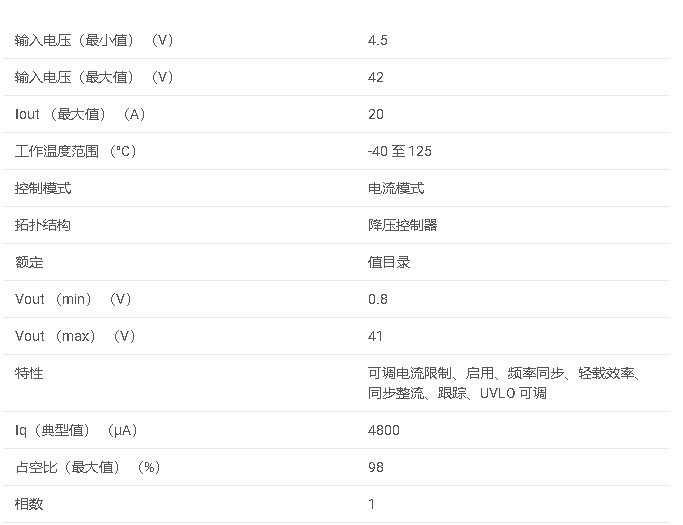
LM5117 是一款適用于降壓穩(wěn)壓器應(yīng)用的同步降壓控制器 來(lái)自高壓或變化較大的輸入電源。控制方法基于當(dāng)前模式 利用仿真電流斜坡進(jìn)行控制。電流模式控制提供固有線路 前饋、逐周期電流限制和易于環(huán)路補(bǔ)償
2025-03-27 16:30:27735 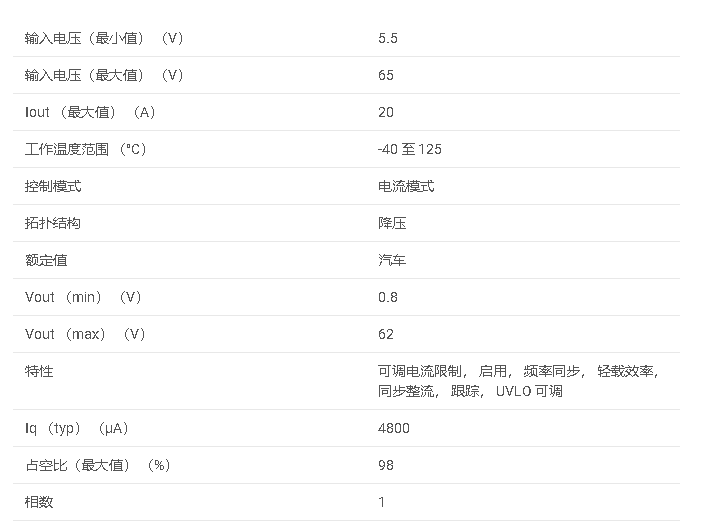
LM5117 是一款適用于降壓穩(wěn)壓器應(yīng)用的同步降壓控制器 來(lái)自高壓或變化較大的輸入電源。控制方法基于當(dāng)前模式 利用仿真電流斜坡進(jìn)行控制。電流模式控制提供固有線路 前饋、逐周期電流限制和易于環(huán)路補(bǔ)償
2025-03-27 17:13:49971 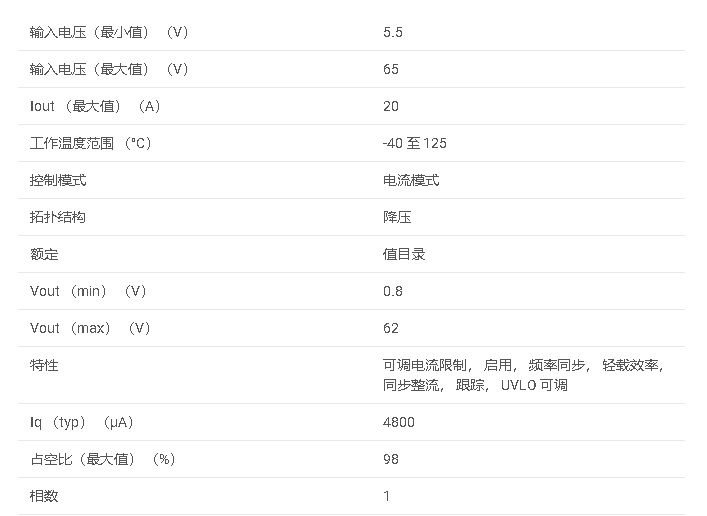
LM5116 是一款同步降壓控制器,適用于采用高壓或變化較大的輸入電源供電的降壓穩(wěn)壓器應(yīng)用。該控制方法基于使用仿真電流斜坡的 current mode control。電流模式控制提供固有的線路前饋
2025-04-02 13:55:131833 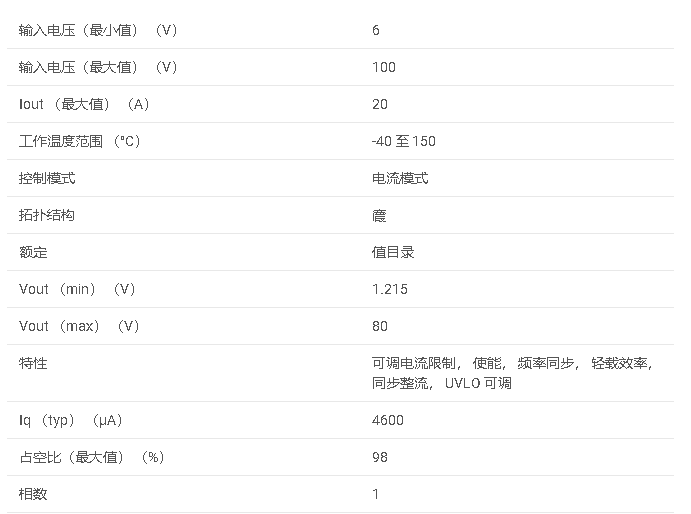
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論