本文檔的目標(biāo)是提供關(guān)于使用STM32CubeMX驅(qū)動低壓步進(jìn)電機(jī)驅(qū)動器STSPIN220的詳盡信息和操作指南。通過本文檔,將深入了解如何利用STM32CubeMX來配置電機(jī)驅(qū)動器,以及如何實(shí)現(xiàn)對步進(jìn)電機(jī)的精確控制和運(yùn)動。
2023-12-01 15:25:01 3146
3146 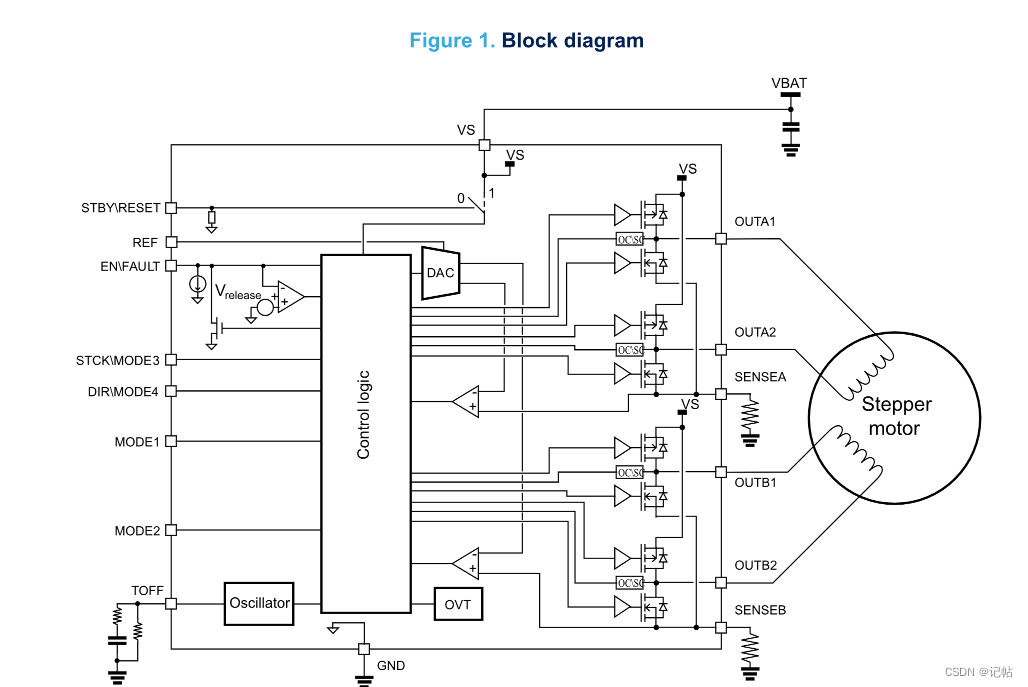
想請問大家一個問題:我現(xiàn)在這個步進(jìn)電機(jī)是兩相,1.8°。電機(jī)驅(qū)動器設(shè)置的是800pulse/rev,那么我pmw頻率和電機(jī)轉(zhuǎn)速的關(guān)系是怎么對應(yīng)的呢(有驅(qū)動器細(xì)分的情況下)?我做了一個實(shí)驗(yàn): 我用
2016-10-10 10:41:03
求大神!!!我用THB6128步進(jìn)電機(jī)細(xì)分器驅(qū)動步進(jìn)電機(jī)的時候,方向位接到單片機(jī)IO口上,給IO口高電平就不能反轉(zhuǎn),如果接到+5V電源上就能反轉(zhuǎn),這是個什么情況啊,糾結(jié)中!!!!
2013-07-29 20:23:17
步進(jìn)電機(jī)細(xì)分驅(qū)動技術(shù)是20世紀(jì)70年代發(fā)展起來的一種可以改善步進(jìn)電機(jī)綜合使用性能的驅(qū)動控制技術(shù)。它是通過控制各相繞組中的電流,使它們按一定的規(guī)律上升或下降,即在零電流到最大電流之間形成多個穩(wěn)定的中間
2019-07-18 15:04:48
求問,,以單片機(jī)作為核心控制部件,設(shè)計(jì)一種利用步進(jìn)電機(jī)細(xì)分驅(qū)動技術(shù)實(shí)現(xiàn)步進(jìn)電機(jī)的啟動、停止、正轉(zhuǎn)、反轉(zhuǎn)、加速、減速和1/4細(xì)分等功能的步進(jìn)電機(jī)驅(qū)動控制系統(tǒng)。完成步進(jìn)電機(jī)控制電路、細(xì)分驅(qū)動電路、鍵盤和LCD接口電路等硬件電路的設(shè)計(jì),完成單片機(jī)控制軟件的設(shè)計(jì),實(shí)現(xiàn)步進(jìn)電機(jī)轉(zhuǎn)動方向及轉(zhuǎn)動速度的精確控制。
2017-01-31 16:50:43
步進(jìn)電機(jī)細(xì)分驅(qū)動的實(shí)質(zhì)是步進(jìn)電機(jī)在輸入脈沖切換時,只 改變相應(yīng)繞組中的電流的一部分,即對相電流實(shí)施微量控制,利用各相電流的 階梯變化產(chǎn)生一系列的假想的磁極對,則轉(zhuǎn)子對應(yīng)的每步運(yùn)動也相應(yīng)只是原步 距角
2021-08-31 06:12:39
步進(jìn)電機(jī)驅(qū)動器三種基本驅(qū)動模式分別是:整步、半步、細(xì)分。其主要區(qū)別在于電機(jī)線圈電流的控制精度。通常步進(jìn)電機(jī)都有低頻振動的特點(diǎn),通過細(xì)分調(diào)協(xié)可以改善電機(jī)低速動運(yùn)行的平衡性。1、整步驅(qū)動在整步運(yùn)行中
2018-08-31 10:45:13
請問步進(jìn)電機(jī)驅(qū)動器在驅(qū)動步進(jìn)電機(jī)時,如果采用細(xì)分模式,那么電機(jī)里面的繞組的正弦波電流里面是有負(fù)值的嗎?
如果用SPWM波來設(shè)計(jì)細(xì)分驅(qū)動,那么幅值為負(fù)的部分,SPWM要怎么體現(xiàn)啊?
2024-05-17 15:29:27
我設(shè)計(jì)了個通過步進(jìn)電機(jī)驅(qū)動器控制步進(jìn)電機(jī)的電路。 電路圖如下: 右邊的PFF,DRF,MFF來自單片機(jī)STM32F767。通過74LVC4245轉(zhuǎn)成5V。左邊是和步進(jìn)電機(jī)驅(qū)動器的接口。 可是接上電機(jī)
2018-10-19 09:43:10
步進(jìn)電機(jī)驅(qū)動器在汽車動力系統(tǒng)中有著重要的地位。 步進(jìn)電機(jī)驅(qū)動器細(xì)分的主要作用是提高步進(jìn)電機(jī)的精確率。國內(nèi)有一些驅(qū)動器采用“平滑”來取代細(xì)分,有的亦稱為細(xì)分,但這不是真正的細(xì)分,本質(zhì)不同。 1.“平滑
2020-06-25 08:00:00
步進(jìn)電機(jī)的基本參數(shù)有哪些?步進(jìn)電機(jī)驅(qū)動器的特點(diǎn)有哪些?步進(jìn)電機(jī)和伺服電機(jī)有哪些不同之處?
2021-09-26 06:28:50
進(jìn)電機(jī)為什么要加驅(qū)動器?步進(jìn)驅(qū)動器和PLC之間如何連接?步進(jìn)電機(jī)驅(qū)動器設(shè)置細(xì)分時要注意的事項(xiàng)有哪些?
2021-10-28 06:28:15
,提高了控制效率。關(guān)于驅(qū)動器的細(xì)分原理及一些相關(guān)說明 在國外,對于步進(jìn)系統(tǒng),主要采用二相混合式步進(jìn)電機(jī)及相應(yīng)的細(xì)分驅(qū)動器。 但在國內(nèi),廣大用戶對“細(xì)分”還不是特別了解,有的只是認(rèn)為,細(xì)分是為了提高
2014-01-21 15:02:35
選擇驅(qū)動器細(xì)分要求的一個主要要求。根據(jù)步進(jìn)電機(jī)選驅(qū)動器主要就是這兩個方面。當(dāng)然選擇的驅(qū)動器還需要和信號發(fā)生...
2021-07-08 09:29:36
步進(jìn)電機(jī)的半步驅(qū)動是由驅(qū)動器來設(shè)置的嗎
2023-10-11 06:52:18
最近公司在做一套門禁,主要使用步進(jìn)電機(jī)拖動臂桿開門關(guān)門,步進(jìn)電機(jī)額定電流3A,驅(qū)動器是雷賽的DM556,使用24V,6.5A的開關(guān)電源供電,目前在使用過程中發(fā)現(xiàn)的問題是電機(jī)在運(yùn)行過程中,如果有人順著
2016-01-04 08:29:28
步進(jìn)驅(qū)動器細(xì)分控制原理是什么?步進(jìn)電機(jī)的相數(shù)與步進(jìn)電機(jī)細(xì)分的關(guān)系是什么?步進(jìn)電機(jī)驅(qū)動器設(shè)置細(xì)分的方法有哪些?
2021-10-27 06:23:18
μs。4)3個16位通用定時器,每個定時器有多達(dá)4個通道,用于輸入捕獲/輸出比較/PWM或脈沖輸出;1個16位帶死區(qū)控制盒緊急剎車,用于電機(jī)控制的PWM高級控制定時器。 2 細(xì)分驅(qū)動原理 一般兩相步進(jìn)
2018-02-24 14:01:14
不同步進(jìn)電機(jī)驅(qū)動器均接同一臺步進(jìn)電機(jī)進(jìn)行測試,輸出電流和細(xì)分設(shè)置相同,所以驅(qū)動器均為半流保持,步進(jìn)電機(jī)驅(qū)動器的芯片各不相同,有THB7128,TB6600,TB6560,還有兩個芯片未知,其中
2015-01-04 22:38:44
的度數(shù)。如1.8度的兩相步進(jìn)電機(jī)用8細(xì)分的驅(qū)動器去驅(qū)動,則轉(zhuǎn)一圈需要1600個脈沖。公式則加入了細(xì)分數(shù)參數(shù)變成: 轉(zhuǎn)一圈需要脈沖數(shù) = 360 / 步距角 x 細(xì)分數(shù) 一般常見的兩相步進(jìn)電機(jī)驅(qū)動器
2023-03-13 14:16:17
為什么步進(jìn)電機(jī)驅(qū)動要引入細(xì)分控制
2023-10-10 07:09:52
下使用?如何選擇步進(jìn)電機(jī)驅(qū)動器供電電源?如何選擇步進(jìn)電機(jī)驅(qū)動器供電電壓?細(xì)分驅(qū)動器的細(xì)分數(shù)是否能代表精度?為什么步進(jìn)電機(jī)的力矩會隨轉(zhuǎn)速的升高而下降?
2021-10-27 07:52:49
如何使用步進(jìn)電機(jī)驅(qū)動器?
2021-10-20 07:48:33
能力,可以使步進(jìn)電機(jī)繞組電流細(xì)分達(dá)到4096,且細(xì)分數(shù)可以自動調(diào)節(jié),極大地提高了控制精度和驅(qū)動器的集成度,減小了驅(qū)動器體積。
2021-05-06 06:34:07
如何采用PIC16C621A單片機(jī)和線圈實(shí)現(xiàn)八細(xì)分步進(jìn)電機(jī)驅(qū)動器的設(shè)計(jì)?
2021-06-15 06:05:22
步進(jìn)電機(jī)驅(qū)動器的電壓如何確定?怎樣去計(jì)算步進(jìn)電機(jī)驅(qū)動器的電流?
2021-09-28 06:15:50
有用過步進(jìn)電機(jī)細(xì)分驅(qū)動模塊的嗎? a4988步進(jìn)電機(jī)驅(qū)動芯片有用過的嗎
2014-12-29 17:19:01
。4)3個16位通用定時器,每個定時器有多達(dá)4個通道,用于輸入捕獲/輸出比較/PWM或脈沖輸出;1個16位帶死區(qū)控制盒緊急剎車,用于電機(jī)控制的PWM高級控制定時器。2 細(xì)分驅(qū)動原理一般兩相步進(jìn)電機(jī)驅(qū)動
2019-06-24 08:00:00
請問stm32步進(jìn)電機(jī)如何驅(qū)動S加速雷塞驅(qū)動器?
2021-10-28 06:58:04
本文介紹了在步進(jìn)電機(jī)驅(qū)動器中利用IR2110S完成mosfet驅(qū)動的設(shè)計(jì),并給出試驗(yàn)結(jié)果。關(guān)鍵詞 步進(jìn)電機(jī);mosfet 驅(qū)動器
2009-03-31 23:29:46 56
56 SJ-3C075M 三相反應(yīng)式步進(jìn)電機(jī)細(xì)分驅(qū)動器:SJ-3C075M 驅(qū)動器驅(qū)動三相反應(yīng)式步進(jìn)電機(jī),該驅(qū)動器采用原裝進(jìn)口模塊,實(shí)現(xiàn)高頻斬波,恒流驅(qū)動,具有很強(qiáng)的抗干擾性、高頻性能好、起動
2010-01-09 10:13:1229 MOTEC 步進(jìn)電機(jī)及驅(qū)動器:德國MOTEC公司多年以來一直致力于步進(jìn)電機(jī)及驅(qū)動器的研究、開發(fā)、生產(chǎn)工作,是世界上步進(jìn)驅(qū)動系統(tǒng)行業(yè)的領(lǐng)先者。該公司生產(chǎn)的兩項(xiàng)混合式步進(jìn)電機(jī)正弦
2010-01-09 10:21:5955 步進(jìn)電機(jī)的細(xì)分控制本質(zhì)上是對步進(jìn)電機(jī)勵磁繞組中的電流進(jìn)行控制,在普通驅(qū)動方式下,驅(qū)動電路只是通過對電動機(jī)繞組激磁電流的“開”和“關(guān)”,使步進(jìn)電動機(jī)轉(zhuǎn)子以其本身
2010-01-09 10:27:23225 二相細(xì)分步進(jìn)電機(jī)驅(qū)動器特點(diǎn):1. 15-36V直流驅(qū)動電壓2. 0.5--4A相位峰值電流可選. 3. 采用近似正弦波細(xì)分電流 (8,16,32,64,12
2010-01-12 10:57:2680 24V/1.5A二相細(xì)分雙坐標(biāo)步進(jìn)電機(jī)驅(qū)動器
2010-01-12 11:00:1880 SH-20403兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動器
驅(qū)動器內(nèi)部的開關(guān)電源設(shè)計(jì)保證了可以適應(yīng)較寬的電壓范圍,用戶可根據(jù)各自的情況在10V到40V DC之間選擇。
2010-05-11 11:59:29139 基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動電路設(shè)計(jì)摘要:在采用步進(jìn)電機(jī)驅(qū)動的機(jī)構(gòu)中,為了提高定位精度,提出了一種基于FPGA 的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動電路的設(shè)計(jì)方案。
2010-05-11 16:09:4150 細(xì)分驅(qū)動精度高.細(xì)分是驅(qū)動器將上級裝置發(fā)出的每個脈沖按驅(qū)動器設(shè)定的細(xì)分系數(shù)分成系數(shù)個脈沖輸出.比喻步進(jìn)電機(jī)每轉(zhuǎn)一圈為200個脈沖,如果步進(jìn)電機(jī)驅(qū)動器細(xì)分為32,那么步
2010-10-29 16:23:49164 基于A3967SLB的步進(jìn)電機(jī)細(xì)分驅(qū)動系統(tǒng)設(shè)計(jì)
摘 要: 本文以Allegro公司推出的A3967SLB型串口控制器為步進(jìn)電機(jī)細(xì)分驅(qū)動系統(tǒng)的硬件核心,實(shí)現(xiàn)了步進(jìn)電機(jī)
2009-09-17 15:01:224079 步進(jìn)電機(jī)與驅(qū)動器常見問題全集
什么是步進(jìn)電機(jī)驅(qū)動器? 步
2010-01-02 10:45:345339 步進(jìn)電機(jī)細(xì)分驅(qū)動電路及原理
細(xì)分原理分析
步進(jìn)電機(jī)驅(qū)動線路,如果按照環(huán)形分配器決定的分配方式,
2010-01-09 14:07:5420064 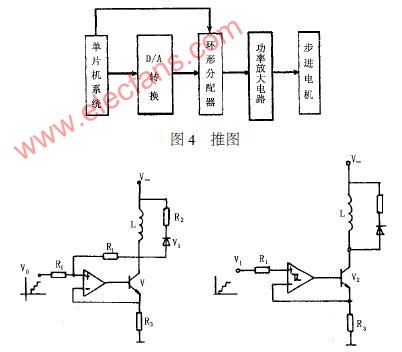
三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動器
本文根據(jù)正弦電流細(xì)分驅(qū)動的原理,設(shè)計(jì)出三相混合式多細(xì)分步進(jìn)電機(jī)驅(qū)動器。系統(tǒng)采用電流跟跟蹤和脈寬調(diào)制技術(shù),使用電機(jī)的相
2010-02-22 10:58:092472 
有的人認(rèn)為,細(xì)分是為了提高精度,其實(shí)不然,細(xì)分主要是改善電機(jī)的運(yùn)行性能,現(xiàn)說明如下:步進(jìn)電機(jī)的細(xì)分控制是由驅(qū)動器精確控制步進(jìn)電機(jī)的相電流來實(shí)現(xiàn)的,以二相電機(jī)為例,假如電機(jī)的額定相電流為3A,如果使用常規(guī)驅(qū)動器(如常用的恒流斬波方式)驅(qū)動該電機(jī)
2011-02-23 16:11:1880 在分析了步進(jìn)電機(jī)的驅(qū)動特性和斬波恒流細(xì)分驅(qū)動原理和混合式步進(jìn)電機(jī)驅(qū)動芯片L297/298的性能、結(jié)構(gòu)的基礎(chǔ)上,結(jié)合8751單片機(jī),設(shè)計(jì)出了混合式步進(jìn)電機(jī)驅(qū)動器.實(shí)測表明,此細(xì)分
2011-09-27 16:25:0674 根據(jù)兩相混合式步進(jìn)電機(jī)細(xì)分驅(qū)動原理,設(shè)計(jì)了一種基于STM32F103RB單片機(jī)的、細(xì)分度可調(diào)的步進(jìn)電機(jī)驅(qū)動器。控制器采用電流矢量控制算法,通過雙H橋驅(qū)動步進(jìn)電機(jī)的兩相轉(zhuǎn)子。利用片
2012-06-13 14:29:36240 步進(jìn)電機(jī)及驅(qū)動器原理知識【知識講解】讓你更好的了解步進(jìn)電機(jī)驅(qū)動器
2015-11-24 10:50:570 步進(jìn)電機(jī)細(xì)分驅(qū)動器的研究_張靖工作原理及其他;步進(jìn)電機(jī)細(xì)分驅(qū)動器的研究_張靖工作原理及其他
2015-12-22 10:32:3014 步進(jìn)電機(jī)驅(qū)動器及細(xì)分控制原理,快來學(xué)習(xí)吧
2016-01-12 18:30:240 模糊PID控制的步進(jìn)電機(jī)細(xì)分驅(qū)動器設(shè)計(jì)-2008。
2016-04-06 11:26:2120 多細(xì)分二相混合式步進(jìn)電機(jī)驅(qū)動器的研制,下來看看
2016-04-25 10:40:3618 多細(xì)分三相混合式步進(jìn)電機(jī)驅(qū)動器研究及實(shí)現(xiàn)
2016-04-25 10:40:3645 基于CPLD的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動器設(shè)計(jì)
2016-04-25 10:54:0934 基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動器設(shè)計(jì)
2016-04-25 10:54:0921 基于STM32IPM模塊的三相步進(jìn)電機(jī)SVPWM驅(qū)動器
2017-01-12 22:29:5639 步進(jìn)電機(jī)及驅(qū)動器原理【PDF】
2017-01-24 17:30:13151 前面我們講到什么是步進(jìn)驅(qū)動器,并介紹了步進(jìn)驅(qū)動器的幾個原理,接下來我們總結(jié)幾種步進(jìn)電機(jī)驅(qū)動器接線方法
2017-08-11 15:42:5079197 
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動器就是為步進(jìn)電機(jī)分時供電的,多相時序控制器。
2017-08-11 16:47:2325536 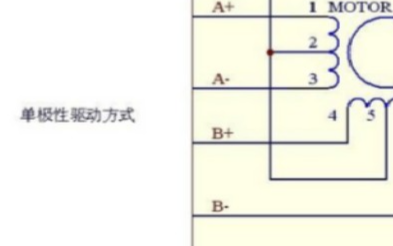
我們了解了步進(jìn)驅(qū)動器的原理以及接線圖,但卻還不知道如何實(shí)操,接下來就以ZHH-MC兩相混合式步進(jìn)電機(jī)驅(qū)動器為例,說說步進(jìn)電機(jī)驅(qū)動器的使用說明書。
2017-08-15 09:22:0841488 
步進(jìn)電機(jī)的相數(shù)是指電機(jī)內(nèi)部的線圈組數(shù),常用的有二相、三相、四相、五相步進(jìn)電機(jī)。電機(jī)相數(shù) 不同,其步距角也不同,一般二相電機(jī)的步距角為1.8度、三相為1.2度、五相的為0.72度。在沒有細(xì)分驅(qū)動器
2017-10-10 14:58:4818 基于提高兩相混合式步進(jìn)電機(jī)的穩(wěn)態(tài)性能和動態(tài)特性的目的,本文結(jié)合轉(zhuǎn)矩矢量控制策略,提出基于DSP的步進(jìn)電機(jī)驅(qū)動器設(shè)計(jì)方案。通過采用最大電流/轉(zhuǎn)矩的轉(zhuǎn)子磁場定向失量控制,完成對兩相混合式步進(jìn)電機(jī)的控制
2017-12-07 10:07:4910 步進(jìn)電機(jī)是一種運(yùn)用廣泛的控制電機(jī),其特征是不使用位置反饋回路就能進(jìn)行速度控制及定位控制,即所謂的電機(jī)開環(huán)控制。相對于伺服電機(jī),步進(jìn)電機(jī)有著成本低廉,控制簡單等優(yōu)點(diǎn),尤其是兩相混合式步進(jìn)電機(jī),在
2018-01-02 19:37:3318 闡述了兩相混合式步進(jìn)電機(jī)的細(xì)分控制原理 , 提出了以 MSP430 單片機(jī)為微控制器 , 通過 DAC7612 產(chǎn)生相差為 π/2的細(xì)分電流控制信號 , 以集成步進(jìn)電機(jī)驅(qū)動芯片為驅(qū)動器 , 實(shí)現(xiàn)了兩相混合式步進(jìn)電機(jī)的細(xì)分運(yùn)行控制 , 電流細(xì)分精度達(dá)到 1/ 2048 。
2018-05-03 15:39:1040 ?? 七特步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行
2018-11-21 15:32:402419 在整步運(yùn)行中,同一種步進(jìn)電機(jī)既可配整/半步驅(qū)動器也可配細(xì)分驅(qū)動器,但運(yùn)行效果不同。步進(jìn)電機(jī)驅(qū)動器按脈沖/方向指令對兩相步進(jìn)電機(jī)的兩個線圈循環(huán)激磁(即將線圈充電設(shè)定電流),這種驅(qū)動方式的每個脈沖將使電機(jī)移動一個基本步距角,即1.80度(標(biāo)準(zhǔn)兩相電機(jī)的一圈共有200個步距角)。
2019-10-01 15:08:0010088 
為了讓更多的用戶了解步進(jìn)電機(jī)及步進(jìn)電機(jī)驅(qū)動器,挑選到最適宜自個運(yùn)用懇求的步進(jìn)電機(jī)和步進(jìn)電機(jī)驅(qū)動器,特將有關(guān)選型準(zhǔn)則介紹如下
2020-03-29 16:05:007852 本設(shè)計(jì)介紹的是THB8128大功率、高細(xì)分兩相混合式步進(jìn)電機(jī)驅(qū)動器設(shè)計(jì)。該THB8128步進(jìn)電機(jī)驅(qū)動器支持雙全橋MOSFET驅(qū)動,低導(dǎo)通電阻Ron=0.4Ω(上橋+下橋)。
2020-04-06 10:10:001512 本文主要闡述了步進(jìn)電機(jī)驅(qū)動器調(diào)速方法及步進(jìn)電機(jī)驅(qū)動器的作用。
2020-04-20 09:10:2812227 本文首先介紹了步進(jìn)電機(jī)驅(qū)動器的細(xì)分原理,其次闡述了步進(jìn)電機(jī)驅(qū)動器怎么設(shè)置細(xì)分,最后介紹了步進(jìn)電機(jī)驅(qū)動器細(xì)分和不細(xì)分的區(qū)別。
2020-04-20 09:16:4043973 本文主要介紹了步進(jìn)電機(jī)驅(qū)動器的參數(shù)及步進(jìn)電機(jī)驅(qū)動器常見故障維修。
2020-04-20 09:23:0817840 在對步進(jìn)電機(jī)細(xì)分驅(qū)動原理進(jìn)行研究的基礎(chǔ)上,提出了一種采用FPGA 實(shí)現(xiàn)步進(jìn)電機(jī)恒轉(zhuǎn)矩細(xì)分驅(qū)動的方法。利用FPGA 芯片中的嵌入式陣列塊(EAB)構(gòu)成LPM-ROM 來存儲步進(jìn)電機(jī)各相細(xì)分電流的數(shù)據(jù)
2020-07-24 16:51:3928 當(dāng)步進(jìn)電機(jī)運(yùn)作的時候,其配套的驅(qū)動器的細(xì)分數(shù)設(shè)置為多少比較合適些?下面是我用兩種電機(jī)做的以下實(shí)驗(yàn)來給大家解答疑問。
2021-02-01 16:04:0032857 步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。步進(jìn)電機(jī)
2021-07-20 10:11:4711350 步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),步進(jìn)電動機(jī)和步進(jìn)電動機(jī)驅(qū)動器構(gòu)成步進(jìn)電機(jī)驅(qū)動系統(tǒng)。 步進(jìn)電動機(jī)驅(qū)動系統(tǒng)的性能,不但取決于步進(jìn)電動機(jī)自身的性能,也取決于步進(jìn)電動機(jī)驅(qū)動器的優(yōu)劣
2021-10-02 18:10:0010884 隨著電力電子技術(shù)的飛速發(fā)展,變頻調(diào)速的性能指標(biāo)完全可以達(dá)到甚至超過直流電機(jī)調(diào)速系統(tǒng)。步進(jìn)電機(jī)驅(qū)動器通過調(diào)節(jié)輸入驅(qū)動器的脈沖頻率以及驅(qū)動器的細(xì)分參數(shù)來達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速的作用,其實(shí)就是控制單位時間內(nèi)步進(jìn)電機(jī)的步數(shù)。
2022-08-15 10:39:109313 步進(jìn)電機(jī)驅(qū)動器的細(xì)分原理介紹,步進(jìn)電機(jī)安裝有帶永久磁性的轉(zhuǎn)子,而定子至少具有兩個繞線。當(dāng)轉(zhuǎn)子磁性與定子繞線保持一致時,將驅(qū)動第二個繞線。兩個繞線交替開啟和關(guān)閉,這將導(dǎo)致電機(jī)鎖定在想要的步進(jìn)位置。通過繞線的電流方向還可反向。
2022-08-16 11:36:2612016 步進(jìn)電機(jī)是一種應(yīng)用廣泛的控制電機(jī)。其特點(diǎn)是無需位置反饋回路即可控制速度和位置,稱為電機(jī)開環(huán)控制。與伺服電機(jī)相比,步進(jìn)電機(jī)具有成本低、控制簡單等優(yōu)點(diǎn),特別是兩相混合式步進(jìn)電機(jī),在工業(yè)運(yùn)動控制系統(tǒng)中
2022-10-08 10:40:215 最簡單的步進(jìn)電機(jī)驅(qū)動方法是單相雙極驅(qū)動方式,也稱為雙相步進(jìn)驅(qū)動方式。該方式只需要使用一個 H橋驅(qū)動器和一個脈沖發(fā)生器,即可實(shí)現(xiàn)步進(jìn)電機(jī)的驅(qū)動控制。
2023-03-08 14:21:5616848 步進(jìn)電機(jī)驅(qū)動器是一種電子設(shè)備,用于控制步進(jìn)電機(jī)的轉(zhuǎn)動和運(yùn)動,其主要原理是將控制信號轉(zhuǎn)換為電機(jī)的驅(qū)動信號。
2023-03-08 14:30:535123 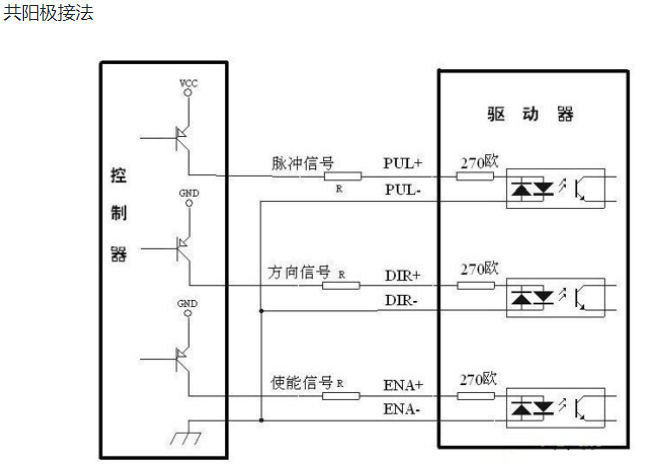
步進(jìn)電機(jī)驅(qū)動器的調(diào)整包括兩個方面:電氣參數(shù)的設(shè)置和運(yùn)動參數(shù)的調(diào)整。電氣參數(shù)的設(shè)置包括電流、細(xì)分數(shù)、步進(jìn)角等,而運(yùn)動參數(shù)的調(diào)整包括速度、加速度、減速度等。
2023-03-08 16:16:2314706 CVD 步進(jìn)電機(jī)驅(qū)動器說明
2023-03-13 16:08:174478 
步進(jìn)電機(jī)驅(qū)動器撥碼 步進(jìn)電機(jī)驅(qū)動器(step driver)是指一類用于控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的電子設(shè)備,它一般采用撥碼開關(guān)來設(shè)定步進(jìn)電機(jī)驅(qū)動器的參數(shù),以實(shí)現(xiàn)對步進(jìn)電機(jī)的控制。 此驅(qū)動器采用交流伺服驅(qū)動器
2023-03-14 14:03:438472 STM32控制步進(jìn)電機(jī):基于定時器中斷的ULN2003驅(qū)動器/步進(jìn)電機(jī)驅(qū)動程序 一、ULN2003驅(qū)動器 1、工作原理 2、步距角以及一圈所需步數(shù)的計(jì)算 二、硬件連接 三、STM32F103定時器
2023-03-16 09:28:4710 1.2度、五相的為0.72度。在沒有細(xì)分驅(qū)動器時,用戶主要靠選擇不同相數(shù)的
步進(jìn)電機(jī)來滿足步距角的要求。
如果使用細(xì)分驅(qū)動器,則相數(shù)將變得沒有意義,用戶只需在驅(qū)動器上改變細(xì)分數(shù),就可以改變步距角。驅(qū)動器一般都具有
細(xì)分功能,常見的
2023-03-17 16:17:3916 的知識,主要包括步進(jìn)電機(jī)的細(xì)分驅(qū)動、加減速控制等內(nèi)容。 1)步進(jìn)電機(jī)的細(xì)分驅(qū)動 我們先來講解什么是細(xì)分驅(qū)動,以兩相的雙極性電機(jī)為例子,它的基本結(jié)構(gòu)如下圖: 最基本的驅(qū)動方式是依次執(zhí)行:A相通正電流,B相
2023-03-20 10:45:5516 步進(jìn)電機(jī)驅(qū)動器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,這個固定的角度被稱為“步距角”。步進(jìn)電機(jī)不能直接接到直流或交流電
2023-11-14 08:07:324268 
步進(jìn)電機(jī)驅(qū)動器是一種常見的電機(jī)驅(qū)動裝置,可用于控制步進(jìn)電機(jī)的轉(zhuǎn)動。調(diào)整步進(jìn)電機(jī)驅(qū)動器的撥碼開關(guān)可以改變其工作模式和參數(shù)設(shè)置,以滿足不同的應(yīng)用需求。下面是一個詳細(xì)解釋如何調(diào)整步進(jìn)電機(jī)驅(qū)動器撥碼開關(guān)
2024-01-15 13:56:456797 步進(jìn)電機(jī)驅(qū)動器是一種常見的電動驅(qū)動裝置,廣泛應(yīng)用于各種自動化設(shè)備中。在使用步進(jìn)電機(jī)驅(qū)動器的過程中,正確的參數(shù)設(shè)置和及時的故障維修是非常重要的。本文將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動器的參數(shù)設(shè)置和常見故障的維修
2024-01-24 11:30:1112629 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過對電機(jī)驅(qū)動信號的細(xì)分來實(shí)現(xiàn)提高電機(jī)精度和減小振動、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類型,它通過
2024-02-18 09:39:3210292 、精密儀器等。 ? ? ? ? 那么,步進(jìn)電機(jī)驅(qū)動器細(xì)分是什么呢?簡單來說,細(xì)分就是通過技術(shù)手段將步進(jìn)電機(jī)的旋轉(zhuǎn)角度進(jìn)一步細(xì)分,從而提高其控制精度和穩(wěn)定性。想象一下,如果步進(jìn)電機(jī)每一步只能前進(jìn)一小段距離,那么通過細(xì)分,我們可以
2024-04-05 08:44:474460 注意的一點(diǎn)是步進(jìn)電機(jī)步距角的改變,這一點(diǎn)將對控制系統(tǒng)所發(fā)的步進(jìn)信號的頻率有影響,因?yàn)?b class="flag-6" style="color: red">細(xì)分后步進(jìn)電機(jī)的步距角將變小,要求步進(jìn)信號的頻率要相應(yīng)提高。以1.8度步進(jìn)電機(jī)為例:驅(qū)動器在半步狀態(tài)時步距角為0.9度,而在十細(xì)分時步距角為0.18度,這樣
2024-04-12 08:48:431192 步進(jìn)電機(jī)作為一種能夠?qū)崿F(xiàn)精確位移控制的電機(jī)類型,在工業(yè)自動化、精密測量、數(shù)控機(jī)床等領(lǐng)域得到了廣泛應(yīng)用。然而,步進(jìn)電機(jī)本身并不能直接接受控制信號進(jìn)行工作,而是需要依賴驅(qū)動器來驅(qū)動其運(yùn)行。本文將詳細(xì)探討為什么步進(jìn)電機(jī)需要加驅(qū)動器,并從步進(jìn)電機(jī)的工作原理、控制需求、驅(qū)動器的作用及特點(diǎn)等方面進(jìn)行深入分析。
2024-06-05 17:30:323574 步進(jìn)電機(jī)驅(qū)動器是步進(jìn)電機(jī)系統(tǒng)中的重要組成部分,它負(fù)責(zé)將控制信號轉(zhuǎn)換為步進(jìn)電機(jī)所需的電流和電壓,以驅(qū)動電機(jī)進(jìn)行精確的角度或線性位移。正確選擇步進(jìn)電機(jī)驅(qū)動器對于保證步進(jìn)電機(jī)系統(tǒng)的正常運(yùn)行、提高控制精度
2024-06-05 18:04:303943 步進(jìn)電機(jī)驅(qū)動器細(xì)分調(diào)整是步進(jìn)電機(jī)控制系統(tǒng)中的一個重要環(huán)節(jié),它直接影響到步進(jìn)電機(jī)的運(yùn)行精度和穩(wěn)定性。本文將詳細(xì)介紹步進(jìn)電機(jī)驅(qū)動器細(xì)分的概念、原理、方法和注意事項(xiàng)。 一、步進(jìn)電機(jī)驅(qū)動器細(xì)分的概念 步進(jìn)
2024-06-12 09:40:104975 ? ? 驅(qū)動器細(xì)分后的主要優(yōu)點(diǎn)為: ? 1、完全消除了電機(jī)的低頻振蕩 ? 低頻振蕩是步進(jìn)電機(jī)(尤其是反應(yīng)式電機(jī))的固有特性,而細(xì)分是消除它的唯一途徑,如果步進(jìn)電機(jī)有時要在共振區(qū)工作(如走圓弧),選擇
2024-07-08 09:06:281245 步進(jìn)電機(jī)驅(qū)動器的主要工作原理是通過精確控制電機(jī)的步進(jìn)角度,實(shí)現(xiàn)對電機(jī)位置和速度的精確控制。步進(jìn)電機(jī)驅(qū)動器通常由微處理器、功率放大器、驅(qū)動電路和保護(hù)電路等組成。 步進(jìn)電機(jī)驅(qū)動器的工作原理 步進(jìn)電機(jī)
2024-10-24 13:40:273094 驅(qū)動電路主要包括以下部分,信號接口電路,邏輯控制電路,功率開關(guān)電路,保護(hù)電路。TMC2660是步進(jìn)電機(jī)驅(qū)動芯片,集成了先進(jìn)的電流控制算法、微步細(xì)分功能和多種保護(hù)機(jī)制。 下面的示例展示了基于STM32F405RGT6的TMC2660步進(jìn)電機(jī)驅(qū)動器。 Part 02 原
2024-12-14 19:24:223654 
用于需要高精度和高速度的應(yīng)用中,如數(shù)控機(jī)床、機(jī)器人等。 2. 微步驅(qū)動器/細(xì)分驅(qū)動器:通過細(xì)分步進(jìn)角或微步技術(shù)來提高電機(jī)的運(yùn)動平滑性和精度。這種驅(qū)動器廣泛應(yīng)用于需要精細(xì)運(yùn)動控制的場合,如3D打印機(jī)、激光雕刻機(jī)等。 3. 雙極性驅(qū)
2025-01-06 08:08:561709 
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論