在MCUXpresso for VS Code中調(diào)用JLINK Script的三種方法
對于MCU開發(fā)者來說,VS Code憑借輕量、跨平臺、高可擴(kuò)展等優(yōu)勢,已經(jīng)成為日常編碼的神器。然....

借助TRAE和MCUXpresso for VS Code實現(xiàn)AI輔助開發(fā)MCX A系列MCU工程
作為一個折騰過幾乎所有主流AI編程輔助工具的開發(fā)者,本猿最終還是覺得國產(chǎn)的TRAE對國區(qū)用戶最友好、....

在ZephyrOS添加NPU驅(qū)動支持加速AI應(yīng)用
? 承接上文——小編就不再鋪墊了,直接上重點! 在上一節(jié)中,我們已經(jīng)成功完成模型訓(xùn)練,并獲得了?量化....


GUI xTurbo讓你可以只用片內(nèi)單緩沖驅(qū)動RGB LCD
在當(dāng)今MCU嵌入式系統(tǒng)中,需要高端GUI顯示的場景越來越多。當(dāng)產(chǎn)品中使用較高分辨率的RGB LCD時....

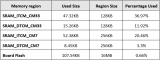
解鎖Zephyr實時操作系統(tǒng)深度調(diào)優(yōu)能力
可以說,代碼編寫只是項目開發(fā)的起點,而隨之而來的資源分析與性能調(diào)優(yōu)才是確保系統(tǒng)穩(wěn)定可靠的關(guān)鍵環(huán)節(jié)。
如何在TensorFlow Lite Micro中添加自定義操作符(2)
上一篇中,小編給大家抽絲剝繭的介紹了在TFLm中實現(xiàn)一個算子所涉及的文件,以及每個文件的具體作用,包....
如何在TensorFlow Lite Micro中添加自定義操作符(1)
相信大家在部署嵌入式端的AI應(yīng)用時,一定使用過TensorFlow Lite Micro,以下簡稱T....
如何在Zephyr RTOS中實現(xiàn)延時和計時函數(shù)
在實時操作系統(tǒng)(RTOS)中,時間管理是核心功能之一。無論是任務(wù)調(diào)度、超時控制,還是周期性事件,延時....

詳解JPEG解碼在MCU上的實現(xiàn)挑戰(zhàn)
在物聯(lián)網(wǎng)和嵌入式應(yīng)用中,圖像處理早已不再是高性能處理器的專屬任務(wù)。越來越多的場景需要在資源受限的微控....
TensorFlow Lite Micro性能分析工具使用指南
辛辛苦苦訓(xùn)練好的AI模型,部署到嵌入式設(shè)備上后卻慢得像蝸牛?明明在電腦上跑得飛快,到了MCU上就卡得....
NXP MCXA系列MCU在電動割草機中的應(yīng)用場景和關(guān)鍵功能
隨著智能家居和園藝設(shè)備的普及,電動割草機逐漸取代傳統(tǒng)燃油割草機,成為綠色環(huán)保和高效作業(yè)的代表。在電動....

如何使用Keil模擬器功能進(jìn)行靜態(tài)算法庫調(diào)試
大家在開發(fā)嵌入式應(yīng)用時候是不是遇到過這種情況?靈光一閃有了新idea,可奈何板子不在身邊?這可如何是....


在恩智浦i.MX RT1180跨界處理器上如何實現(xiàn)1588協(xié)議同步
簡介 在前面的文章中介紹了i.MX RT1180跨界處理器的主要應(yīng)用場景是在工業(yè)自動化與智能制造的高....

i.MX RT1180實現(xiàn)EtherCAT+伺服控制的終極實踐
今天繼續(xù)為大家介紹i.MX RT1180實現(xiàn)EtherCAT+伺服控制的終極實踐:雙電機控制與Eth....
如何使用生成式AI加速NXP MCU的軟件開發(fā)
小編作為一名一線MCU系統(tǒng)應(yīng)用工程師,既從事MCU底層驅(qū)動開發(fā),也涉足MCU應(yīng)用層開發(fā)。早在 202....

伺服電機控制系統(tǒng)的電流環(huán)帶寬提高設(shè)計
在傳統(tǒng)的PI電流控制器中,一旦PWM周期確定了,那么系統(tǒng)帶寬也就隨之確定了。由于電機本身的阻感電氣特....

伺服電機控制系統(tǒng)的高寬帶電流環(huán)參數(shù)設(shè)計
上回我們介紹了EtherCAT是如何利用SSC產(chǎn)生的sync信號,與電機控制系統(tǒng)完成同步的,如此我們....




恩智浦MCXE24x MCU在固態(tài)斷路器的應(yīng)用
固態(tài)斷路器(Solid State Circuit Breaker)是一種利用半導(dǎo)體器件(如晶體管、....


恩智浦MCXA343和MCXA344通用MCU產(chǎn)品介紹
既8月份發(fā)布了MCXA345和MCXA346兩款產(chǎn)品后,10月份咱們發(fā)布MCXA343和MCXA34....

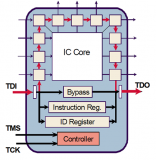
恩智浦i.MX RT1180 MCU如何進(jìn)入Boundary Scan模式
本文重點介紹RT1180如何進(jìn)入Boundary Scan模式,通過Jtag來進(jìn)行板級硬件測試的過程....


如何實現(xiàn)EtherCAT與電機控制之間的同步處理
上篇提到利用EtherCAT產(chǎn)生的sync信號,同步所有從站節(jié)點系統(tǒng),完成在同一時刻的電機指令更新。....

恩智浦i.MX RT1180跨界MCU驅(qū)動EtherCAT的工作流程
上周的分享已經(jīng)介紹了整個參考設(shè)計的概況和相關(guān)硬件資源。那么,本次會從軟件工程角度進(jìn)行分享。首先來了解....



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)