") i.MX RT1180實現(xiàn)EtherCAT+伺服控制的終極實踐
i.MX RT1180實現(xiàn)EtherCAT+伺服控制的終極實踐

今天繼續(xù)為大家介紹i.MX RT1180實現(xiàn)EtherCAT+伺服控制的終極實踐:雙電機(jī)控制與Ethercat資源使用。
前面幾期已經(jīng)給大家把整個EtherCAT加電機(jī)控制的方案都逐一介紹,本期內(nèi)容將會介紹整個方案的資源使用情況。
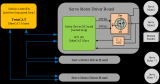
首先來看內(nèi)存資源使用情況:

可以看到CM33數(shù)據(jù)和程序內(nèi)存總共使用了62.5KB,不到CM33 TCM內(nèi)存的一半,電機(jī)控制應(yīng)用在CM7 TCM上使用了不到25%。也就是說,在整套方案都運(yùn)行在TCM的情況下,i.MX RT1180的RAM內(nèi)存是完全足夠的,客戶還可以在剩余的內(nèi)存空間中去做很多定制化應(yīng)用。
其次是外設(shè)資源的使用:

工程中用的的外設(shè)資源并不算多,除去第一個EtherCAT控制器,其余外設(shè)都是用于電機(jī)控制應(yīng)用。針對于伺服控制+EtherCAT這類應(yīng)用,i.MX RT1180的外設(shè)資源可以說是非常豐富的。
最后是電機(jī)控制執(zhí)行時間:
測試條件:測量持續(xù)時間約為30秒,電機(jī)保持持續(xù)旋轉(zhuǎn)。所有報告結(jié)果均采用最大值。測量通過利用System Tick函數(shù)在指定代碼段上進(jìn)行。
Toolchain: MCUXpresso IDE
Compiling optimization level: MCUX -Os

800MHz的CM7核處理器加持下,完成一次電機(jī)控制電流環(huán)路計算與PWM,ADC寄存器讀寫只需要1.4us不到,這對于高性能伺服控制來說,是至關(guān)重要的。
更強(qiáng)大的計算能力意味著電機(jī)控制系統(tǒng)能夠做到更高的控制頻率,伺服系統(tǒng)能夠達(dá)到更高的控制帶寬。當(dāng)然,除了強(qiáng)大的處理器以外,i.MX RT1180的TCM能夠真正做到0等待周期訪問,也就是說,TCM能夠在一個CPU時鐘就完成數(shù)據(jù)的讀/寫操作,這也是執(zhí)行時間如此之快的另一個原因。
本次關(guān)于EtherCAT+電機(jī)控制的參考方案到此就結(jié)束了。i.MX RT1180擁有多種工業(yè)網(wǎng)路總線支持(TSN, EtherCAT,Profinet等),最高支持單芯片四電機(jī)控制的外設(shè)資源,多種多樣的外部memory接口與通訊外設(shè)接口,高達(dá)800Mhz主頻的CM7核能夠快速及時的完成繁重的電機(jī)相關(guān)處理任務(wù)。
可以說i.MX RT1180是工業(yè)自動化領(lǐng)域的不二之選。更多詳情大家可以登錄官網(wǎng)查詢,也歡迎在留言區(qū)交流。
-
電機(jī)控制
+關(guān)注
關(guān)注
3601文章
2138瀏覽量
278241 -
伺服控制
+關(guān)注
關(guān)注
5文章
160瀏覽量
24850 -
ethercat
+關(guān)注
關(guān)注
20文章
1524瀏覽量
45559
原文標(biāo)題:從EtherCAT到伺服控制:i.MX RT1180終極實踐
文章出處:【微信號:NXP_SMART_HARDWARE,微信公眾號:恩智浦MCU加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
恩智浦i.MX RT1180 EtherCAT外設(shè)中SM FMMU功能介紹及應(yīng)用

恩智浦MCU方案 單顆i.MX RT1180實現(xiàn)EtherCAT+伺服控制
基于恩智浦i.MX RT1180芯片的EtherCAT+伺服電機(jī)控制方案

RT1180 XMCD的特點和使用注意事項

恩智浦i.MX RT1180跨界MCU助力下一代伺服控制系統(tǒng)
恩智浦i.MX RT1180 MCU如何進(jìn)入Boundary Scan模式
在恩智浦i.MX RT1180跨界處理器上如何實現(xiàn)1588協(xié)議同步

RT1180 FlexSPI Follower模塊簡介

i.MX RT開發(fā)筆記-08 | i.MX RT1062嵌套中斷向量控制器NVIC(按鍵中斷檢測)

RT-Thread & NXP 發(fā)布 i.MX RT 系列 BSP 新框架
基于i.MX RT單芯片實現(xiàn)的GUI圖形顯示和語音控制解決方案
在i.MX RT10xx使用FlexIO實現(xiàn)XY2-100振鏡控制協(xié)議

恩智浦i.MX RT1180跨界處理器如何選型




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論