SG_POINT_Default={Name[]"SG1",GNumber 1,Thickness ....
與它相配合還要有相對應的USER用戶程序組建,只要是標準用戶程就行,不能和激光焊的標準組件混用。
KUKA在PLC中組態,注意KUKA的GSD文件的PN軟件版本與KUKA設置的PN軟件版本一致。

另外,與CP卡不同,集成的WEB服務器的CPU本身不提供任何的安全機制,那么如果需要防止非授權的訪問....

可以使用該控制器作為PID固定設定值控制器或在多循環控制中作為層疊、混料或比率控制器。該控制器的功能....

SIMATIC ProDiag是用于機器和工廠診斷的完全集成的TIA解決方案。它節省了在工程階段在C....

零點標定可通過確定軸的機械零點的方式進行。在此過程中軸將一直運動,直至達到機械零點為止。這種情況出現....
TSEND“ & ?TRCV “ 發送和接收數據(TCP 和ISO - on- TCP)?T....

MOVIFIT的安全S11的控制原理電路圖,安全電路控制逆變電路的控制電源,從而切斷電機的電源。
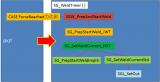
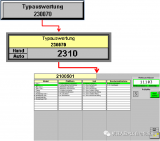
庫數據塊 DB529"DB_Typ_Var" 用作帶有效車身型號的數據塊的創建模板(與工廠有關)。....
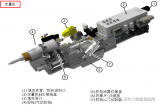
螺栓自動擰緊設備主要由螺栓擰緊設備,送料器,控制器,鏈接機構組成 。1.螺栓擰緊設備(將螺釘擰緊在工....

IFMIT_KL1_SPUELEN AND ((NOT $OUT[O_R_PFO] AND NOT ....

變量path里寫入要存儲的地址是“D: est” ,文件名是變量FID_strVisuText1_0....

GLOBALDEF SGM_MOVE_TO_FORCE (FORCE :IN, MovementTy....

$USER_SAF - 操作人員防護裝置 / 防護門該輸出端在打開護欄詢問開關(運行方式 AUT)....

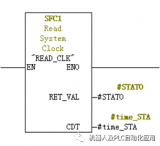
使用SFC1 "READ_CLK"讀取時間,可以讀取當前CPU系統時鐘的日期和時間.
BASE坐標系: 可根據需要定義用戶坐標系。 當機器人配備多個工作臺時,選擇用戶坐標系可使操作更為簡....
#RetValue_konfiguriert:= DeviceStates(LADDR :="Loc....
![最新-FB148[系統診斷]的新增點](https://file.elecfans.com/web1/M00/BE/D9/pIYBAF7jIceAM9_NAABbBSvt9oM194.png)
機器人發給PLC信號$IN_HOME、$EXT_AUTO、$ALAM_SOTP、$SUSER_SAF....

WHILE 循環是一種當型或者先判斷型循環,這種循環會在執行循環的指令部分前先判斷終止條件是否成立。
如果當前位置和參考位置之間的偏差太大,則調整參考失敗。機器人以安全停止1停止,并且只能在操作模式T1....

TECH4 Prozessgeraet MS Steuerung=Nr1Brenner=Nr1 Te....

在 KRC4 中,DualNIC在設備管理器里面不是顯示在【網絡適配器】之下。該網卡不受 Windo....
P_Part=SGL_CALC_POS(TEACH_POS, ServoGun[SG_ActiveG....

通過 XML 文件配置以太網連接。針對每個連接,必須在機器人控制系統的目錄 C:KRCROBOTER....
電機膠槍之所以需要校正工具是因為,電機轉子的轉頭需要有一個和膠槍嘴的正確安裝位置,所以需要校正工具來....
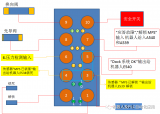
為了解鎖MPS(使用或不使用docked工具),必須激活安全開關并設置“解鎖MPS”信號。閥1和閥2....
兩個通信伙伴都調用FB 65 "TCON"來設置和建立通信連接。在這些參數中,您要指定哪個伙伴是主動....

EtherCAT(以太網控制自動化技術)是一個開放架構,以以太網為基礎的現場總線系統,其名稱的CAT....

涂膠設備定量機電機采用增量式電機,每次斷電重啟后都要自動進行零點校正,也就是找到它上行程開光。



 工商網監
工商網監