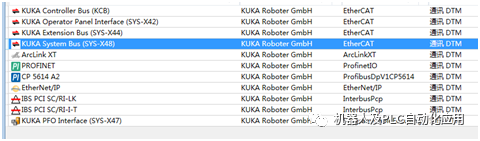
 機器人內部的控制總線KCB和系統總線KSB
機器人內部的控制總線KCB和系統總線KSB

機器人內部的控制總線KCB和系統總線KSB
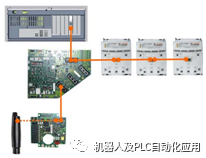
KCB總線:基于 EtherCat 的驅動總線,循環時間125 微秒,FSOE ( F ail S afe O verE therCat)網絡安全校驗。
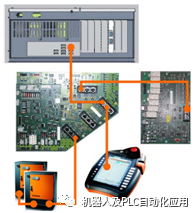
KSB總線:基于 EtherCat 的總線,循環時間 1 毫秒,FSOE (F ail Safe O ver E therCat)網絡安全校驗。
那么EtherCat又是怎樣的網絡呢?
EtherCAT(以太網控制自動化技術)是一個開放架構,以以太網為基礎的現場總線系統,其名稱的CAT為控制自動化技術(ControlAutomationTechnology)字首的縮寫。EtherCAT是確定性的工業以太網,最早是由德國的Beckhoff公司研發。
EtherCAT(Ethernet for Control AutomationTechnology)是一種基于以太網的開發構架的實時工業現場總線通訊協議,它于2003年被引入市場,于2007年成為國際標準,并于2014年成為中國國家標準。EtherCAT的出現為系統的實時性能和拓撲的靈活性樹立了新的標準。
? 1)EtherCAT是最快的工業以太網技術之一,同時它提供納秒級精確同步。相對于設置了相同循環時間的其他總線系統,EtherCAT系統結構通常能減少25%-30%的CPU負載。
? 2)EtherCAT在網絡拓撲結構方面沒有任何限制,最多65535個節點可以組成線型、總線型、樹型、星型或者任意組合的拓撲結構。
? 3)相對于傳統的現場總線系統,EtherCAT節點地址可被自動設置,無需網絡調試,集成的診斷信息可以精確定位到錯誤。同時無需配置交換機,無需處理復雜的MAC或者IP地址。
? 4)EtherCAT主站設備無需特殊插卡,從站設備使用可以由多個供應商提供的高集成度、低成本的芯片。
? 5)利用分布時鐘的精確校準EtherCAT提供了有效的同步解決方案,在EtherCAT中,數據交換完全基于純粹的硬件設備。由于通訊利用了邏輯環網結構和全雙工快速以太網而又有實際環網結構,“主站時鐘”可以簡單而精確地確定對每個“從站時鐘”的運行補償,反之亦然。分布時鐘基于該值進行調整,這意味著它可以在網絡范圍內提供信號抖動很小、非常精確的時鐘。
EtherCATUDP(用戶數據報協議)可以將EtherCAT協議封裝為UDP/IP數據報文,這就意味著,任何以太網協議堆棧的控制均可編址到EtherCAT系統中,甚至還可以通過路由器使通訊跨接到其他子網。
EtherCAT的協議有:
?EtherCAT實現以太網(EoE)
?EtherCAT實現文件存取(FoE)
?EtherCAT實現安全性(FSoE) 用于安全檢測,安全驗證。
EtherCAT是以太網現場總線但它使用地址號分配而不是PN網絡所使用IP地址和名稱。
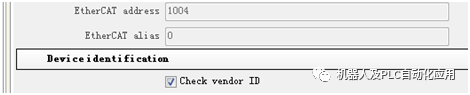
EtherCAT站點分配
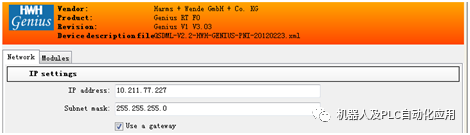
PN網絡的設備分配
因此實際上他們是不可能互換的,所以機器人內部網絡和機器人附屬設備組態網絡是不可能出錯的保證了機器人網絡安全。
在國外除了KUKA也有人運用EtherCAT網絡和PC制作了工業機器人也是強人!
EtherCAT故障狀態顯示:
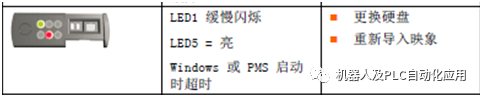
windows系統啟動故障,內部KCB總線和KSB總線同時出現總線故障.

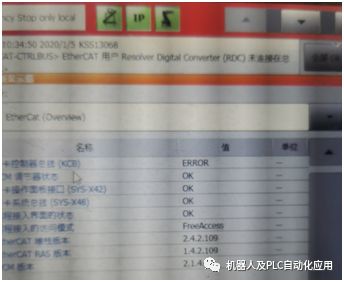
KCB控制總線故障,包括: KPP ,KSP,RDC 連線故障
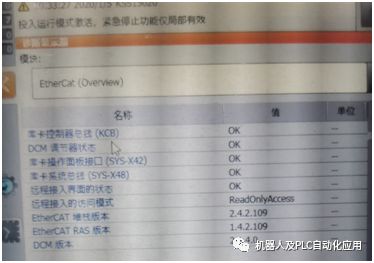
KUKA內部Ethercat總線的診斷:
通過診斷顯示器對Ethercat 內部總線狀態進行檢查。
下圖為內部總線正常時的狀態:
下圖為內部總線KCB斷網時的狀態:
-
機器人
+關注
關注
213文章
31073瀏覽量
222162 -
網絡安全
+關注
關注
11文章
3489瀏覽量
63407 -
總線
+關注
關注
10文章
3040瀏覽量
91657
原文標題:KUKA內部EtherCAT總線及故障診斷
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數據?





 工商網監
工商網監
評論