 PLC-300基于VASS標準制作機器人自動備份程序
PLC-300基于VASS標準制作機器人自動備份程序

制作非標準程序FB1和DB1,然后在OB1中調用.

使用SFC1讀取PLC時間.
使用SFC1 "READ_CLK"讀取時間,可以讀取當前CPU系統時鐘的日期和時間.
CDT輸出當前日期和時間值
數據類型DATE_AND_TIME
DATE_AND_TIME長度64位
DATE_AND_TIME數據類型以BCD碼格式存儲:

對月的字節進行清零

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
31074瀏覽量
222189 -
plc
+關注
關注
5051文章
14594瀏覽量
486886 -
存儲
+關注
關注
13文章
4787瀏覽量
90057
原文標題:PLC-300基于VASS標準制作機器人自動備份程序
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
自動化生產線中AB PLC通過協議轉換網關和DeviceNet協議的機器人進行通訊案例
一、案例背景:在自動化生產線中實現AB PLC與DeviceNet機器人的高效集成 隨著制造業向智能化、柔性化方向快速發展,許多傳統制造企業的自動化生產線面臨著核心設備互聯互通的嚴峻挑

高精度機器人控制的核心——基于 MYD-LT536 開發板的精密運動控制方案
一、背景:機器人邁向“微米級控制時代”
隨著智能制造和自動化產業的持續升級,工業機器人不再僅僅承擔重復搬運,而是被要求在裝配、檢測、精密加工等高精度場景中完成微米級控制任務。
在這些“高精度機
發表于 11-14 15:48
RK3576機器人核心:三屏異顯+八路攝像頭,重塑機器人交互與感知
瑞芯微RK3576 AIoT處理器處理器憑借其卓越的多屏異顯與8路攝像頭接入能力,為機器人領域帶來革新。米爾電子MYD-LR3576開發板實測數據顯示,在高負載下CPU占用僅34%,完美實現多路視覺
發表于 10-29 16:41
小蘿卜機器人的故事
經過我的申請,
馬老師發放了,
小蘿卜機器人的,
開發權限,
原來的小蘿卜公司,
因為經營不善倒閉,
作為科研產品,
幾個技術對此惋惜,
自掏腰包,
要讓小蘿卜機器人,
再生,
每次聽到小蘿卜說
發表于 10-23 05:24
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
機器人獲得更接近人類的觸覺反饋。
賽事首席技術官王博士表示:“當機器人開始‘感知’而非‘計算’環境時,真正的智能化競技時代才算到來。” 未來,磁傳感器技術的持續進化,必將不斷改寫人形機器人運動的競爭規則與技術
發表于 08-26 10:02
工業機器人的特點
生產可以提高產品品質。通過設定相同的程序,機器人可實現重復操作,保證了產品的標準化;在精細化生產方面,工業機器人可實現低于0.1毫米的運動精度,可以完成精細的雕刻工作。提高產出
由于
發表于 07-26 11:22
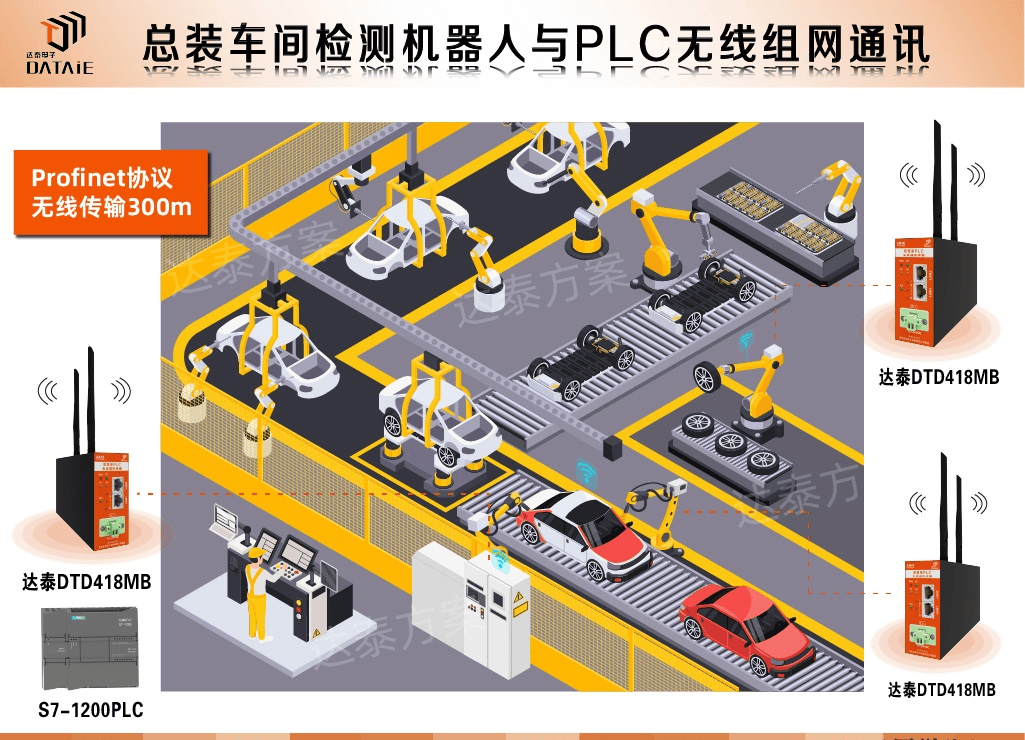
汽車制造車間檢測機器人與PLC無線以太網實時控制方案
本次項目是位于廣州的一家新能源汽車生產線。本次技改對象為總裝車間工作的檢測機器人。在汽車生產線的總裝車間中,檢測機器人扮演著至關重要的角色,其核心作用是通過自動化技術提升車輛制造的質量、效率和一致性

跨協議探秘:profinet轉ethernet ip網關搞定川崎機器人與PLC通信
在工業自動化場景中,不同品牌的設備往往采用不同的通信協議,例如西門子PLC通常使用 PROFINET ,而川崎機器人則可能采用 Ethernet/IP 。要讓它們實現數據交互,通常需要借助

當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
NY-N831-CCLKIE網關的核心在于“雙向協議翻譯引擎”:
實時數據映射:內置200+工業協議接口模板,將三菱PLC的D寄存器數據(如X/Y軸坐標)自動映射到庫卡機器人的Move指令參數,誤差控制在
發表于 06-04 14:31
工業機器人與協作機器人概念不同
在自動化生產的浪潮中,工業機器人與協作機器人逐漸成為企業提升效率、優化產能的得力助手。但它們并非同一概念,在功能、設計與應用場景上有著顯著差異。北京沃華慧通測控有限公司憑借深厚的技術沉淀,為不同需求的企業提供適配的

盤點#機器人開發平臺
地瓜機器人RDK X5開發套件地瓜機器人RDK X5開發套件產品介紹 旭日5芯片10TOPs算力-電子發燒友網機器人開發套件 Kria KR260機器人開發套件 Kria KR260-
發表于 05-13 15:02
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統
ROS的 目的 :ROS支持通用庫,是通信總線,協調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發
發表于 04-30 01:05
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
講解了如何在 ROS 2 中實現機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節點,可以接收來自上層的控制指令,如速度指令或目標位置指令,然后通過底層的驅動程序控制機器人的電機,實現
發表于 04-27 11:24
普渡工業配送機器人PUDU T300斬獲歐盟雙認證
近日,普渡機器人自主研發的工業配送機器人PUDU T300正式通過TüV南德意志集團(以下簡稱“TüV南德”)的嚴格評估,成功獲得歐盟機器指令CE-MD和歐盟無線指令CE-RED雙項認



 工商網監
工商網監
評論