 步進電機直接驅動可行性及驅動板設計
步進電機直接驅動可行性及驅動板設計

步進電機以 開環定位精準、無累積誤差、低速大轉矩、控制簡單 等特點,在小型化、低成本、中低速運動控制場景中被廣泛應用。步進電機 直接驅動(Direct Drive) 是指取消同步帶、齒輪箱、聯軸器等中間傳動機構,由電機軸直接驅動負載,實現更高剛性、更高響應速度與更低維護成本。
本文從 直接驅動可行性分析、適用工況邊界、關鍵技術要點、步進直接驅動板硬件架構、控制方案與工程設計規范 等方面,系統闡述步進電機直接驅動的應用價值與落地實現路徑。
一、步進電機直接驅動基本概念
步進電機直接驅動(Stepper Motor Direct Drive):
電機輸出軸與負載 剛性直連 ,無減速機構、無傳動間隙,電機一步對應負載一步,實現:
- 零間隙、零回程誤差
- 高剛性、高動態響應
- 低噪聲、低磨損
- 結構簡化、體積更小
與傳統“步進+減速箱”對比:
- 優點:無間隙、響應快、精度高、可靠性高
- 缺點:同等轉矩下電機體積更大、高速性能弱
二、步進電機直接驅動可行性分析
2.1 可行條件(滿足即可直接驅動)
1. 負載轉矩 ≤ 電機保持轉矩的 1/3~1/2
保證不失步、不堵轉。
2. 運行轉速 ≤ 600rpm
步進電機高速轉矩跌落明顯,直接驅動更適合低速工況。
3. 負載轉動慣量與電機慣量匹配合理
一般建議 JL / JM ≤ 5~10。
4. 無強沖擊、無劇烈振動負載
步進開環抗擾動能力弱,沖擊易失步。
5. 定位精度要求高、間隙敏感
如閥門、云臺、精密滑臺、風扇/泵類負載。
2.2 典型可行應用
- 散熱風扇/離心風機 直連驅動
- 小型泵、計量泵、隔膜泵
- 監控云臺、攝像吊艙
- 醫療儀器、分析儀器運動機構
- 閥門執行器、風門執行機構
- 3D 打印機/小型數控機床直連軸
- 光學鏡頭調焦、激光振鏡外轉子步進
2.3 不適合直接驅動的場景
- 高速旋轉(>1000rpm)
- 重載、大沖擊負載
- 需要極高加速性能的場合
- 長距離、大慣量傳動機構
三、步進直驅核心優勢與限制
優勢
1. 無傳動間隙 ,定位精度完全由步進步距角決定
2. 結構極簡 ,體積小、成本低、可靠性高
3. 低速 大轉矩 ,無需減速即可驅動
4. 開環控制, 無需編碼器 也能精確定位
5. 噪聲與振動比齒輪傳動更低
限制
1. 同等輸出轉矩下,電機體積比“步進+減速”大
2. 高速區轉矩快速下降, 不適合高轉速
3. 開環易失步,擾動大時需閉環步進
4. 大慣量負載啟動/急停易過沖或失步
四、步進直接驅動驅動板總體架構
步進直驅驅動板與普通步進驅動架構基本一致,但針對 直連負載、低轉速、高剛性、低噪聲 做專門優化。
4.1 整體硬件架構
```
外部電源(12V/24V/36V)
↓
EMI濾波 → 母線電容 → 全橋逆變電路(H橋/三相橋)
↓
MCU/專用驅動芯片 → 柵極驅動 → 功率MOS管
↓
步進電機繞組(直驅負載)
保護電路(過流/過溫/欠壓/堵轉) ←→ MCU
位置/電位器/通信控制 ←→ MCU
```
4.2 驅動板核心功能
1. 微步細分驅動(1/2、1/4、1/8、1/16、1/32 微步)
2. 限流恒流控制,抑制發熱
3. 低速靜音斬波(TMC 靜音技術)
4. 過流、過溫、欠壓、堵轉保護
5. 方向/使能/脈沖控制或總線控制(RS485/CAN)
6. 可選:閉環反饋(霍爾/編碼器)
五、驅動板關鍵硬件模塊設計
5.1 功率級設計
- 拓撲: 兩相 H 橋 或 三相全橋(針對三相步進)
- MOSFET:低 Rds(on),耐壓 ≥ 2 倍電源電壓
- 母線電容:100μF 電解 + 0.1μF 高頻陶瓷電容
- 電流采樣:0.1Ω~0.2Ω 合金采樣電阻
5.2 驅動芯片方案
方案A:專用集成驅動(推薦)
- TMC2209/TMC2225(靜音、UART)
- A4988、DRV8825(低成本)
- TMC5160(高電壓、大電流、閉環)
優勢:外圍簡單、可靠性高、靜音效果好。
方案B:分立驅動(大功率)
- MCU + 柵極驅動(IR2104/EG2132)+ MOS 管
適合大電流、高電壓直驅平臺。
5.3 控制核心
- 普通步進:GPIO 脈沖+方向
- 智能直驅:STM32/GD32 + 步進專用驅動
- 總線型:RS485 / CAN 控制位置、速度、加速度
5.4 保護電路
- 過流保護:采樣電阻+比較器
- 過溫保護:NTC 貼功率管
- 欠壓保護:母線電壓檢測
- 堵轉保護:電流異常/失步檢測
六、直驅控制策略與微步優化
6.1 微步細分控制
直接驅動必須使用 高微步細分 :
- 1/16~1/32 微步
- 轉矩波動更小、運行更平滑
- 噪聲顯著降低
6.2 電流衰減模式
- 快衰減:高速性能好,噪聲大
- 慢衰減:低速平穩,發熱略高
- 混合衰減:直驅負載推薦使用
6.3 靜音斬波技術(TMC 核心)
- SpreadCycle / StealthChop
- 直驅風扇、泵、家電場景必備
- 實現 20dB 以上降噪
6.4 加減速曲線
直驅負載慣量直接耦合,必須使用:
- S 型加減速
- 梯形加減速(簡單可靠)
避免啟動/停止沖擊失步。
七、風扇/泵類直驅步進可行性重點說明
結合你之前一直在寫的 散熱風扇、無刷風扇驅動 主題,重點對比:
7.1 步進電機直驅風扇是否可行?
完全可行,且在特定領域已大量應用:
- 低轉速、大風量靜壓風扇
- 工業機柜靜音風扇
- 醫療設備、實驗室風扇
- 需要 精準恒速 的散熱系統
7.2 優勢
- 轉速精度遠高于普通 BLDC
- 低速轉矩大,啟動性能好
- 無霍爾/無傳感器算法問題
- 結構簡單,直連葉輪
7.3 限制
- 轉速上限低(通常<3000rpm)
- 效率低于 FOC 無刷電機
- 高速噪聲大于 BLDC
> 結論: 靜音、低轉速、高精度散熱風扇非常適合步進直驅;高轉速大功率風扇仍以 BLDC 為主。
八、步進直驅驅動板典型設計案例
8.1 24V 兩相步進直驅驅動板
- 電源:12–24V
- 電流:0.5–2A
- 微步:1/32
- 驅動芯片:TMC2209
- 控制:脈沖/方向 或 UART
- 應用:直驅風扇、小型泵、云臺、閥門
8.2 結構特點
- 單面/雙面小體積 PCB
- 功率管大面積鋪銅散熱
- 信號地與功率地單點共地
- 輸入輸出加 ESD、RC 濾波
九、工程設計注意事項
1. 直連必須保證同軸度 ,偏心會引發振動噪聲
2. 葉輪/負載慣量不宜過大,避免失步
3. 驅動電流按 額定電流的 70%~90% 設置
4. 高微步細分降低振動
5. PCB 功率回路盡量短,減少 EMI
6. 風扇類直驅注意動平衡
十、總結
1. 步進電機 直接驅動在中低速、低/中負載、高精度場景下完全可行 ,尤其適合風扇、泵、閥、云臺等直連負載。
2. 直驅取消傳動機構,帶來 零間隙、高剛性、低噪聲、高可靠性 ,是小型精密運動機構的優選方案。
3. 驅動板以 集成步進驅動芯片 + 微步細分 + 靜音斬波 + 完善保護 為核心架構,硬件簡單、易于量產。
4. 在散熱風扇領域,步進直驅適合 靜音、精密恒速 場景,可與 BLDC 形成差異化互補方案。
如果你需要,我可以繼續為你寫一篇 配套文章:
《步進直驅風扇驅動板完整原理圖與PCB設計要點》
或者
《步進電機與BLDC風扇直驅方案對比與選型指南》
審核編輯 黃宇
-
步進電機
+關注
關注
153文章
3270瀏覽量
152679 -
直接驅動
+關注
關注
1文章
8瀏覽量
9723
發布評論請先 登錄
步進電機控制方案中驅動板的核心作用與技術解析
步進電機驅動板細分控制策略與電流波形優化
直播云臺閉環步進電機驅動板關鍵技術研究
長晶驅動芯片ULN2003與ULN2803系列高可靠性步進電機驅動方案解析

基于麥歌恩磁編碼芯片的步進電機驅動板研發
步進電機驅動器的作用介紹

Trinamic步進電機驅動芯片有哪些優點?
Trinamic步進電機驅動芯片有哪些優點?

HR4988微特步進電機驅動器:高效便捷的驅動解決方案
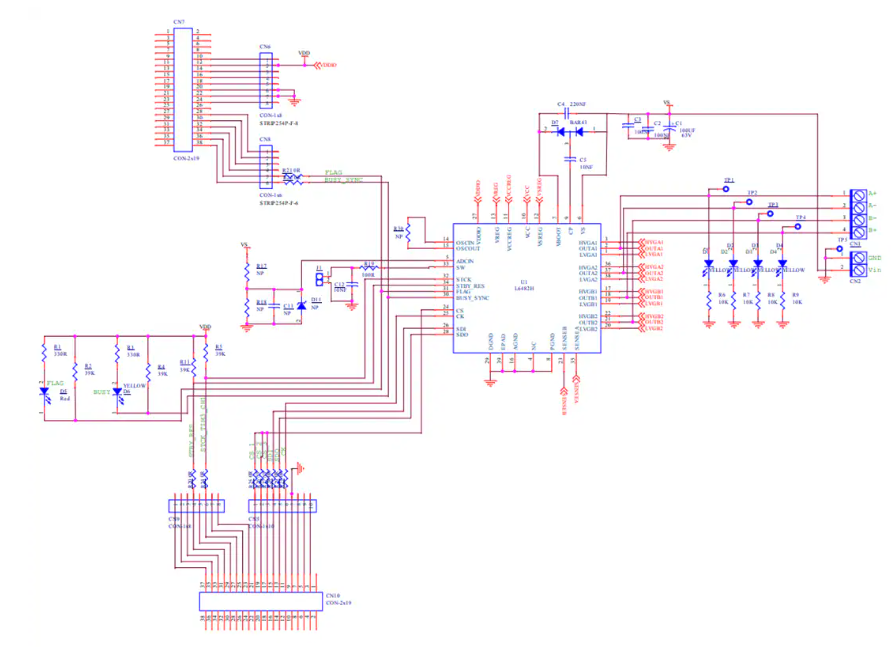
基于L6482的步進電機驅動評估板技術解析



 工商網監
工商網監
評論