 時識科技類腦視觸覺方案破解機器人靈巧操作難題
時識科技類腦視觸覺方案破解機器人靈巧操作難題

當前,機器人要實現如人類般靈巧的操作,其觸覺感知系統正面臨三大核心瓶頸:功耗高導致續航受限,數據量大引發延遲響應,以及系統復雜制約集成部署。這些因素共同限制了機器人在精細操作、人機安全交互等場景下的應用深度與廣度。
一項發布于arXiv的研究顯示,采用時識科技(SynSense)Speck感算一體SoC的類腦視觸覺方案,在關鍵性能上實現了跨越式突破。該方案在滑覺與紋理檢測任務中平均功耗僅6.53毫瓦,其推理能效相較傳統CPU與GPU架構,更是實現了超10,000倍與2,500倍的提升。
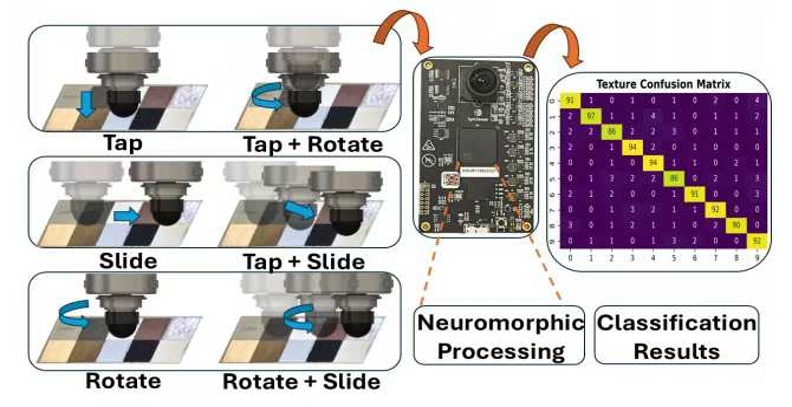
圖片來源:論文Exploratory Movement Strategies for Texture Discrimination with a Neuromorphic Tactile Sensor
從“耗能”到“能效”
類腦方案的底層革新
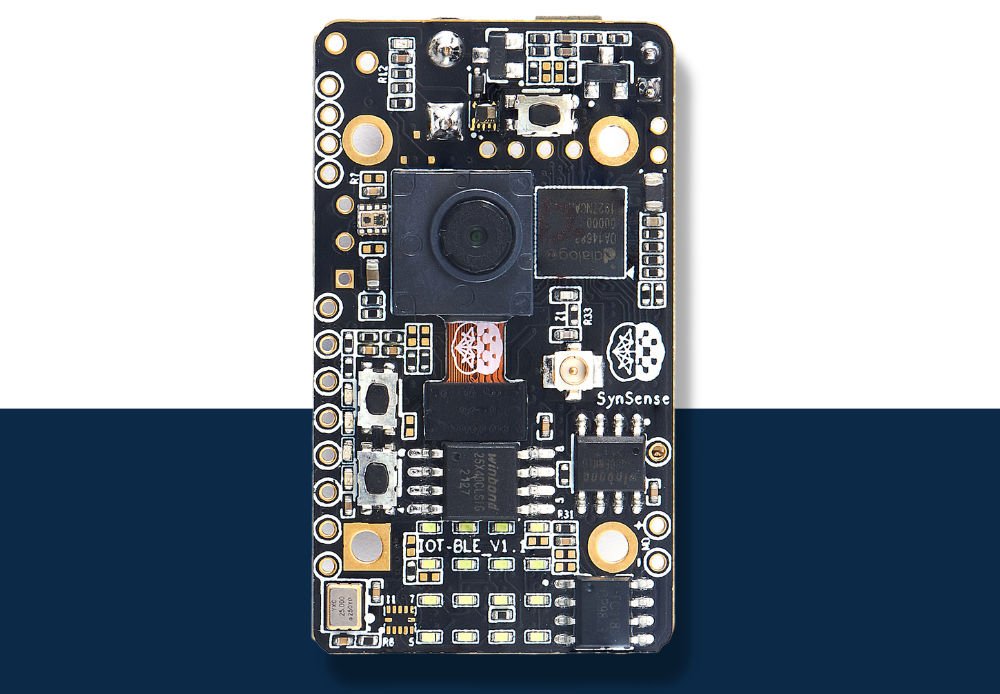
Speck感算一體SoC
時識科技(SynSense)類腦方案的優勢源于其根本性的設計范式變革。與傳統方案持續采集、集中處理海量數據不同,Speck采用“事件驅動”與“感算一體”架構。這意味著芯片僅在感知到動態變化時(即“事件”)才進行稀疏計算,從源頭避免了冗余數據處理。其高度集成的設計將視覺傳感器與脈沖神經網絡處理器緊密結合,極大減少了數據搬運帶來的功耗和延遲。
因此,與傳統方案相比,Speck在滿足實時處理的條件下,算力需求可降至傳統方案的0.1%-1%,能耗更是降低了2-3個數量級。這種“超低功耗+毫秒級延遲”的特性,使得機器人有望擺脫線纜束縛,在復雜環境中實現長期、靈敏的觸覺交互成為可能。
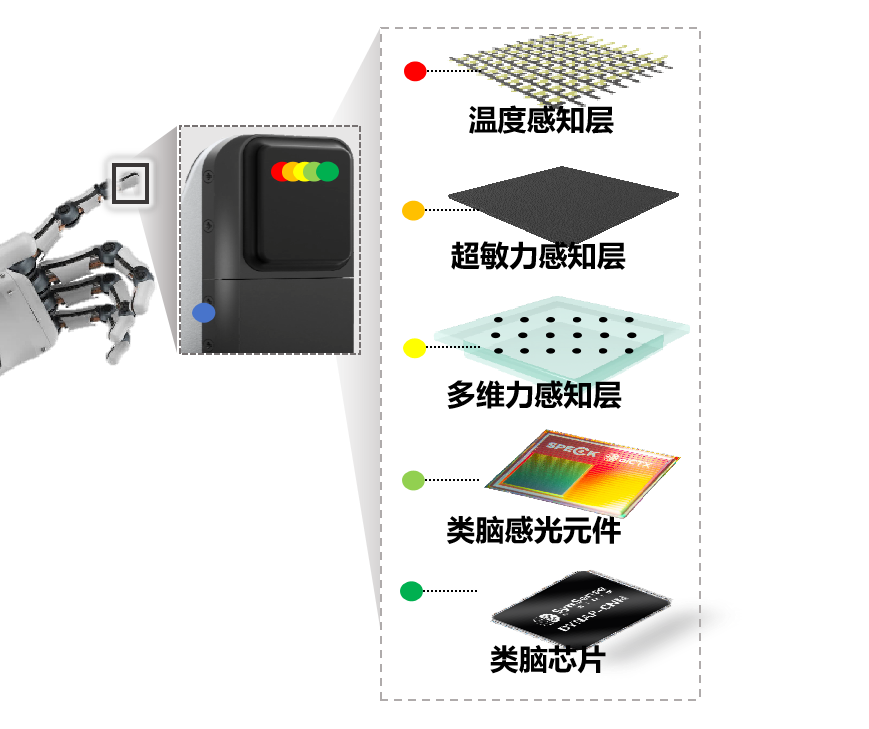
機器人視觸覺方案示意圖
邁向產業共贏:以類腦解決方案
共解實際場景難題
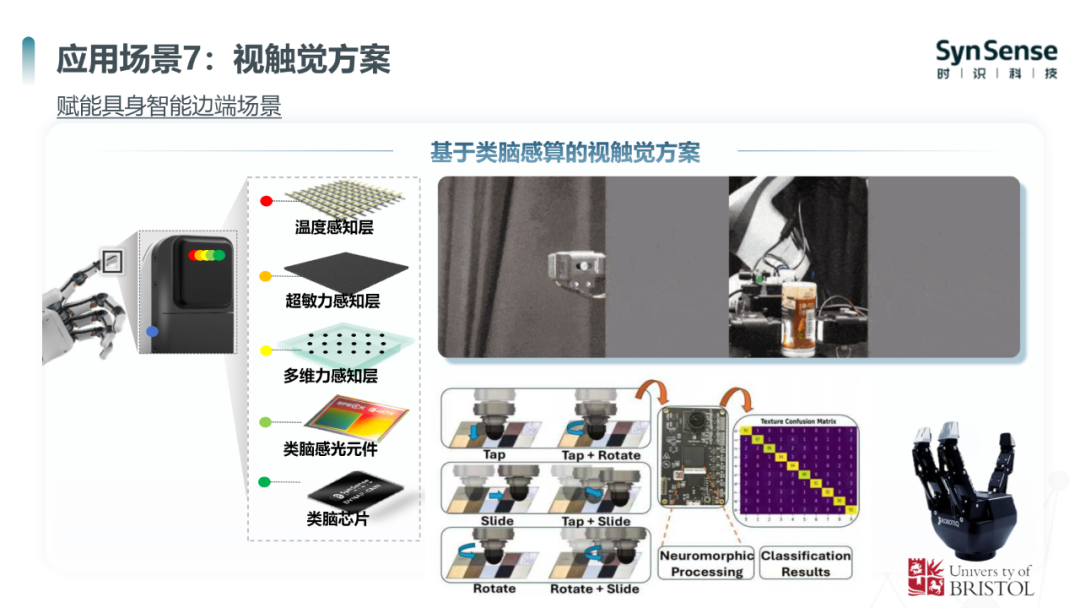
時識科技(SynSense)視觸覺方案
類腦視觸覺技術的可行性已得到初步驗證,但其巨大潛力有待與產業界、學術界共同挖掘。時識科技(SynSense)已在此方向深度布局,不僅持續迭代Speck等核心芯片,還吸引了國際知名科學家Yulia Sandamirskaya教授加入,主導前沿的脈沖神經網絡觸覺感知研究。同時,布里斯托大學也正在利用Speck芯片開展觸覺傳感技術的研發工作。
在機器人靈巧操作、精密制造中的微米級檢測、智能假肢的真實觸感反饋等前沿領域,傳統的感知與計算方案正面臨功耗、延遲與集成度的實際瓶頸。時識科技基于Speck等感算一體類腦芯片,已推出可直接集成或二次開發的成熟模組與解決方案,其毫瓦級超低功耗與毫秒級實時響應的特性,為上述高要求場景提供了切實可行的技術。
時識科技(SynSense)可提供:
類腦芯片:提供包括感算一體動態視覺智能SoC(如Speck系列)和低維信號通用類腦處理器(如Xylo系列)在內的多款核心芯片,涵蓋視覺、聲音、動態等多模態感知計算場景
核心模組:提供已通過性能驗證的類腦感知與計算硬件模組,助力合作伙伴快速集成,顯著降低功耗與延遲,加速產品智能化升級
行業方案定制:針對特定場景需求(如工業產線上的高速瑕疵檢測、微型設備高性能控制、假肢的自適應抓握控制等),聯合開發定制化的類腦感知算法與嵌入式系統
聯合項目攻關:積極參與并支持您申報省部級或國家級研發計劃,共同攻克產業關鍵共性技術難題,推動類腦智能在重點領域的規模化落地
我們相信,類腦技術的產業化是一場需要產業鏈上下游緊密協作的“長征”。時識科技(SynSense)致力于成為您可靠的技術合伙人,通過持續的技術迭代與場景驗證,共同將類腦智能的潛力轉化為提升產品競爭力、開拓新市場的強勁動能。
-
機器人
+關注
關注
213文章
31301瀏覽量
223316 -
時識科技
+關注
關注
0文章
53瀏覽量
4924
原文標題:類腦視觸覺:破解機器人靈巧操作瓶頸的新路徑已驗證
文章出處:【微信號:SynSense時識科技,微信公眾號:SynSense時識科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
靈巧手觸覺感知技術深度報告:從“單點感知”到“觸覺成像”

人形機器人“靈巧手”,正在接近27個自由度的人手

空心杯電機,為何成為人形機器人靈巧手的 “香餑餑”?

從概念到落地:靈巧手為何是人形機器人產業化的決勝環節?
時識科技在類腦與腦機接口領域實現重要突破
【案例分享】電子谷定制通訊線束:人形機器人穩定律動連接方案

如何利用NVIDIA Cosmos Cookbook提升機器人操作能力
人形機器人市場火爆!雷賽智能重磅推出“20自由度”靈巧手方案
國際類腦計算科學家Yulia Sandamirskaya教授加盟時識科技
機器人競技幕后:磁傳感器芯片激活 “精準感知力”
我國發布全球首款輕量化重載機器人仿生靈巧手

價值量占人形機器人超30%,十大國產靈巧手方案匯總
機器人氣密性測漏儀操作難度大嗎?岳信儀器帶著真相來了!




 工商網監
工商網監
評論