") 德思特方案|突破戶外測試局限:德思特GNSS仿真方案賦能機器人高精定位
德思特方案|突破戶外測試局限:德思特GNSS仿真方案賦能機器人高精定位

前置背景
在戶外機器人領(lǐng)域,像割草機器人這類需在復(fù)雜環(huán)境精準作業(yè)的設(shè)備,衛(wèi)星定位導(dǎo)航技術(shù)是其自主運行的核心支撐。然而,戶外場景挑戰(zhàn)重重:
一方面,真實環(huán)境里衛(wèi)星信號易被樹木、建筑物等遮擋產(chǎn)生多徑效應(yīng),嚴重影響定位精度;
另一方面,傳統(tǒng)實地測試受場地、天氣等因素限制,成本高、周期長,且難以全面覆蓋各類極端或復(fù)雜應(yīng)用場景,無法高效驗證機器人定位系統(tǒng)的精度與穩(wěn)定性。
同時,對于戶外機器人而言,僅依靠GNSS(全球?qū)Ш叫l(wèi)星系統(tǒng))難以滿足高精度作業(yè)需求,雙天線定向技術(shù)能為機器人提供航向等姿態(tài)信息,RTK(實時動態(tài)差分定位)技術(shù)可實現(xiàn)厘米級的定位精度,這些技術(shù)與GNSS結(jié)合,是戶外機器人實現(xiàn)精準作業(yè)的關(guān)鍵。
為在產(chǎn)品研發(fā)早期充分且高效地測試戶外機器人的衛(wèi)星定位導(dǎo)航性能,以及雙天線定向、RTK 厘米級定位的性能,室內(nèi)仿真測試成為關(guān)鍵手段。德思特憑借先進的GNSS模擬技術(shù),推出針對戶外機器人的高精定位仿真測試方案,為戶外機器人定位系統(tǒng)研發(fā)提供可靠測試保障。
方案內(nèi)容
1核心設(shè)備與技術(shù)
采用德思特GNSS模擬器,該模擬器可生成實時/預(yù)設(shè)/錄制的位置信息、6DOF(六自由度)姿態(tài)信息以及多徑模型。
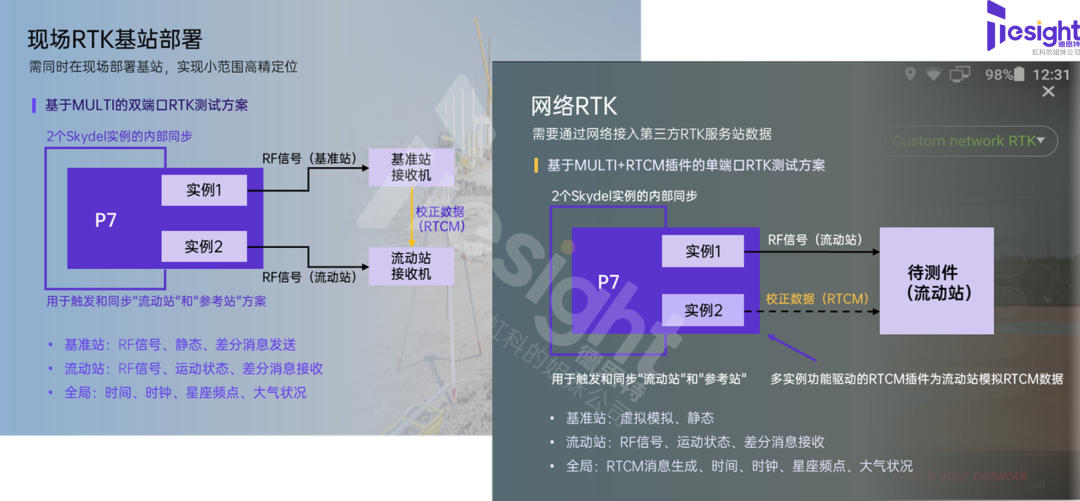
此外,它可以通過多實例功能實現(xiàn)流動站主天線+從天線仿真以及RTK虛擬信號(等同于CORS站信號的仿真,通過WIFI、5G等方式傳輸)實現(xiàn)RTK定位+雙天線定向:


方案連接圖
2測試對象
以配備雙天線+RTK(實時動態(tài)差分定位)技術(shù)的戶外機器人(如割草機器人)為待測件,待測件包含待測試的定位算法。
3測試價值
可實現(xiàn)全球范圍內(nèi)任意地點與位置的測試,突破實地測試的地域限制。
生成的衛(wèi)星信號與真實信號具有高一致性,能模擬真實環(huán)境下的定位場景。
具備雙天線同步仿真能力,可精準模擬機器人雙天線定位的情況。
支持RTK基準站與RTCM(無線電技術(shù)委員會海事服務(wù))消息模擬,為RTK定位測試提供完整環(huán)境。
接口開放且集成度高,易于部署,能快速搭建測試平臺。
可選支持硬件在環(huán)仿真功能
4解決的問題
可在室內(nèi)構(gòu)建完整測試平臺,實現(xiàn)戶外機器人定位系統(tǒng)的早期驗證,提升研發(fā)效率。
支持對戶外機器人姿態(tài)的精細仿真,全面測試機器人在不同姿態(tài)下的定位表現(xiàn)。
能夠?qū)崿F(xiàn)厘米級的高精定位測試,滿足戶外機器人對定位精度的高要求。
可模擬樹木、樓層等遮擋引起的多徑問題,測試機器人定位系統(tǒng)在復(fù)雜環(huán)境下的抗干擾能力。
機器人定位導(dǎo)航模組
RTK高精定位+雙天線測試實操
本次我們測試使用的是行業(yè)內(nèi)較為通用的和芯星通UM982模組來進行驗證測試。在該測試demo中,我們使用德思特GNSS模擬器GTS-P72的雙端口能力來實現(xiàn)對于主從天線的仿真,并采用虛擬基站來進行RTK信息的仿真。
1.方案構(gòu)成
本次測試我們需要用到的硬件有:
GTS P74 GNSS模擬器以及配套的顯示器、鼠標、鍵盤
和芯星通GNSS接收機,型號:UM982,作為待測定位設(shè)備
PC一臺
安裝和芯星通上位機軟件Uprecise(V2.0.1037)
注意:如果使用其他版本,可能部分設(shè)置有所變化
網(wǎng)線、射頻電纜等其他連接用配件
2.硬件連接圖
按照如下示意圖連接:
射頻線纜前端需要添加衰減器30dB,確保最終輸出功率為-110dBm
GNSS模擬器需要與DUT上位機位于可通信網(wǎng)絡(luò),可提前“ping”驗證通路情況

3.GNSS模擬器Skydel軟件場景配置
在本案例中,我們需要打開三個GNSS示例,分別用于“主天線”、“副天線”、“虛擬基站”模擬——
每一路模擬信號均如下:
GPS L1CA + L5
BEIDOU B1I + B2I
GALILEO E1 + E5
模擬的軌跡是無人機在美洲某郊區(qū)實行農(nóng)業(yè)任務(wù)的往復(fù)“S型”軌跡
主天線實例
①打開Skydel預(yù)設(shè)好的實例“主天線”,將會加載以上信息并設(shè)置好工作實例【往復(fù)“S型”軌跡】
星座頻點與上述要求一致
往復(fù)“S型”軌跡
此時output啟用的是DTA-2116 SDR,硬件序號為0,1
如何詳細設(shè)置GNSS參數(shù)
德思特干貨 | Skydel 天線模型配置詳解:從信號增益到物理姿態(tài)的完整設(shè)置指南


②將該案例設(shè)置為時間同步中的“主實例”。

③設(shè)置主天線位置相對于車輛幾何中心的偏移量(也可設(shè)置為0)。

從天線實例
①打開Skydel預(yù)設(shè)好的實例“從天線”/或復(fù)制“主天線實例”,將會加載以上信息并設(shè)置好工作實例
星座頻點與上述要求一致
往復(fù)“S型”軌跡
此時output啟用的是DTA-2116 SDR,硬件序號為2,3
②將該案例設(shè)置為時間同步中的“從實例”,同步上述所有設(shè)置。

③設(shè)置副天線位置相對于車輛幾何中心的偏移量。

注意:
主天線位置與副天線位置差距應(yīng)設(shè)置為大于等于50cm,在本案例中:
主天線相對車輛幾何中心偏移量為(0,0,0)
主天線相對車輛幾何中心偏移量為(0,3,0),且擁有角度偏差(30°,30°,30°)
即二者位置差為3m,且存在角度差
④此時無需額外配置就可使得主天線、副天線綁定保持相對靜止,除二者位置有絕對偏差外,其他所有信息(衛(wèi)星狀況、時間、天線增益)等全部一致,符合真實世界的應(yīng)用場景。
RTK虛擬基站實例
①打開Skydel預(yù)設(shè)好的實例“RTK基站”,將會加載以上信息并設(shè)置好工作實例:
星座頻點與上述要求一致
啟用的是“NoneRT”虛擬SDR,不占用真實SDR配置
基站坐標為一確定靜態(tài)點,位于往復(fù)“S型”軌跡附近的某個高海拔(50m)位置處,作為靜態(tài)基站。


②將該案例設(shè)置為時間同步中的“從實例”,保證時間一致。

③設(shè)置RTK基站傳輸類型為“Ntrip”,設(shè)置傳輸端口為“2101”,允許本地計算機訪問,傳輸RTCM消息類型設(shè)置為:
1006 (Base station position)
1033(Receiver & antenna)
1077 (MSM7 GPS)
1127 (MSM7 BeiDou)

④在終端框中輸入“ifconfig”查詢到本機IP地址作為后續(xù)的RTCM傳輸IP地址。
此時,我們就完成了所有配置,可以點擊從實例中的“Start”開始仿真,此時三個實例會全部啟動仿真。

4.UM982上位機設(shè)置
①在準備好的PC上連接UM982接收機,打開Uprecise,在上方receiver選擇對應(yīng)串口號,設(shè)置波特率模式為:“Autobauding”,等待連接成功。

②配置RTK設(shè)置:點擊左側(cè)工具箱標識,選擇“RTCM數(shù)據(jù)流”。

點擊“Input”,配置RTK流動站設(shè)置如下:
IP號:192.168.150.27(匹配GNSS模擬器IP地址)
端口號:2101
設(shè)置掛載點:
SKYDEL
User ID、password:空白
配置完成后,點擊"確認"。
點擊“Output”,選中接收機對應(yīng)的COM口,配置完成后,點擊"確認"。

返回RTCM數(shù)據(jù)流界面,勾選“Hex”,點擊“連接”,開始正常傳輸RTCM數(shù)據(jù)。

5.結(jié)果
等待一段時間后,應(yīng)觀測到地圖中的定位狀態(tài)變更為:RTK Fixed,則完成本地的基準站-流動站雙站同步仿真,并能夠觀測到由于主從天線帶來的定向效果。
觀測定位情況
打開GNSS信號觀測窗口、Chart圖,點擊冷啟動,等待信號穩(wěn)定后,出現(xiàn)衛(wèi)星信號柱狀圖與定位信息,并進入RTK工作模式。

觀測定向情況
點擊“姿態(tài)”窗口,可觀察到實時航向角(方位角),基本與仿真過程中的方位角一致。

至此,我們在一臺設(shè)備內(nèi)完成了對于主天線+從天線+一個獨立的RTK基站的全部仿真。
德思特GNSS模擬器GTS P7

點擊文末“閱讀原文”,了解產(chǎn)品詳情
德思特自研GNSS模擬器GTS P7是基于Skydel的定位、導(dǎo)航和定時測試解決方案。它以易于使用、一站式、小尺寸的方式提供最高標準的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號測試。GTS P7具有高端的性能,1000Hz的模擬迭代率,支持高達700個通道(搜星數(shù)量),并可模擬高動態(tài)實時同步信號和全視野衛(wèi)星信號。支持多星座和多頻率的GNSS模擬,可以通過編程來模擬所有當前和未來的GNSS信號。
卓越的HIL仿真能力,打通多家場景仿真軟件
提供匹配各行業(yè)標準的自動化測試
創(chuàng)新的“MULTI”多實例架構(gòu)
-
測試測量
+關(guān)注
關(guān)注
25文章
1015瀏覽量
92001 -
機器人
+關(guān)注
關(guān)注
213文章
31311瀏覽量
223370 -
GNSS
+關(guān)注
關(guān)注
9文章
1003瀏覽量
51344
發(fā)布評論請先 登錄
一文讀懂載波聚合(CA):從技術(shù)原理到德思特實操測試方案

軟硬協(xié)同突破傳統(tǒng):德思特&珞光電子聯(lián)合推出GNSS模擬與導(dǎo)航對抗測試解決方案

軟硬協(xié)同突破傳統(tǒng):德思特 珞光電子聯(lián)合推出GNSS模擬與導(dǎo)航對抗測試解決方案

德思特應(yīng)用 | 突破10ns脈沖限制:德思特脈沖發(fā)生器如何解決NVM測試的超快激勵與高保真挑戰(zhàn)
德思特方案 | 研發(fā)量產(chǎn)一機搞定,德思特脈沖發(fā)生器TS-PG1072為激光芯片測試降本增效

德思特方案 | 整車 GNSS 產(chǎn)線測試,3 分鐘高精度驗證

混頻器:雷達/衛(wèi)星通信核心器件,德思特脈沖發(fā)生器助力變頻測試高效落地
使用德思特GNSS模擬器實現(xiàn)RTK基站與流動站的獨立模擬
藍牙設(shè)備射頻性能測試:德思特ALifecom ACTiV非信令方案全解析
三架構(gòu)全覆蓋,德思特ALifecom基站模擬器精準賦能eSIM測試
GNSS模擬器如何賦能無人機整機檢測?揭秘高效測試背后的黑科技

案例分享 | 前沿物理實驗室突破全光學磁翻轉(zhuǎn)研究瓶頸:德思特脈沖發(fā)生器賦能飛秒級磁矩操控
德思特方案 EMI兼容測試方案——匹配不同測試標準,準確高效!

最新動態(tài)!德思特受邀亮相粵港科創(chuàng)盛會,展示國產(chǎn)高精度定位硬實力!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論