 Nullmax DiffRefiner軌跡預測框架入選AAAI 2026
Nullmax DiffRefiner軌跡預測框架入選AAAI 2026

1月20日至27日,第40屆 (AAAI 2026) 于新加坡召開,匯聚世界頂尖學者與先鋒研究者,以智慧碰撞共繪人工智能的未來圖景。在端到端自動駕駛領域,將擴散模型的“迭代細化”能力應用于軌跡規劃,以應對駕駛行為中的多模態挑戰,是熱點研究方向之一。由 Nullmax 研發團隊與浙江大學學子共同撰寫,此次入選 AAAI 2026 的軌跡預測框架 DiffRefiner,正是對這一技術方向的深入探索,驗證了擴散模型在軌跡規劃中的可行性與優越性。本文將對該項成果進行系統解讀。
論文標題:DiffRefiner: Coarse to Fine Trajectory Planning via Diffusion Refinement with Semantic Interaction for End to End Autonomous Driving
論文鏈接:https://arxiv.org/abs/2511.17150
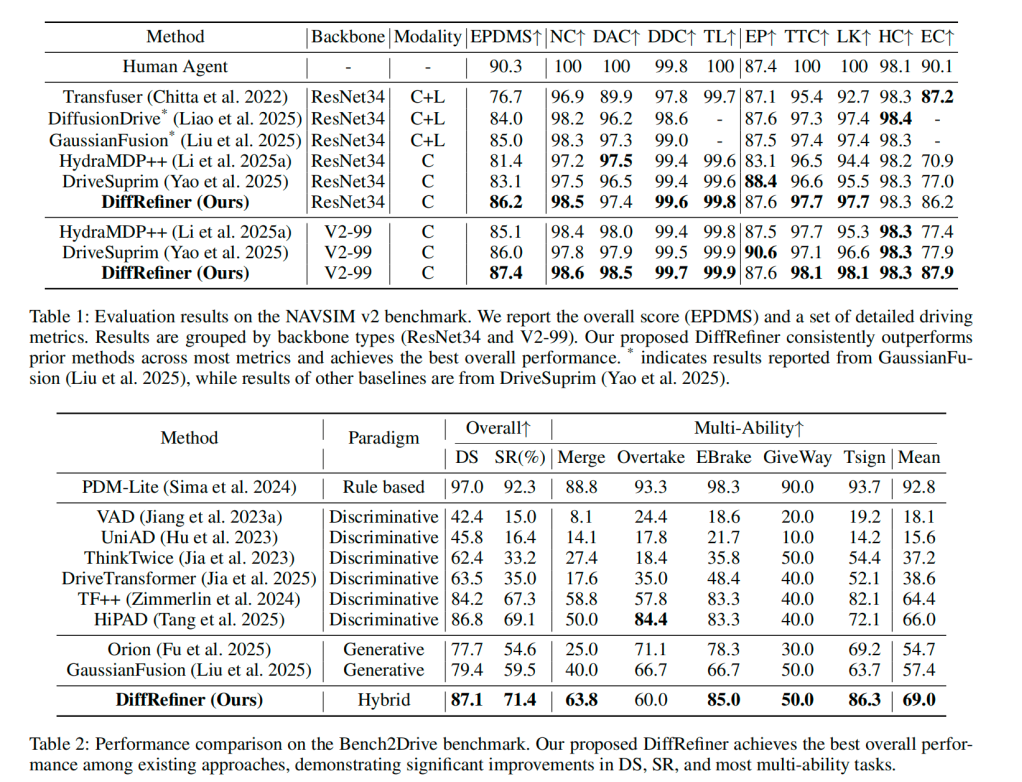
DiffRefiner 是由 Nullmax 提出的最新端到端自動駕駛規劃框架。不同于傳統只做單階段回歸或單純擴散生成的工作,DiffRefiner 通過由粗到精軌跡預測框架,實現了“生成式+判別式”的混合范式,把判別式的高效規劃和生成式的多樣性建模有機結合。在兩個公開基準測試——真實道路數據集 NAVSIM v2 和閉環仿真基準 Bench2Drive中,DiffRefiner均取得了當前最優(SOTA)性能。
由粗到精框架,混合范式實現更類人決策
在整體架構上,DiffRefiner 包含“感知模塊 + 提案解碼器 + 擴散精煉器”三大組件。首先,我們利用基于 BEV 的感知網絡同時完成目標檢測與語義分割,構建結構化的場景表示;隨后,一個輕量級 Transformer 提案解碼器在預先聚類得到的軌跡錨點上做回歸調整,生成一組符合場景先驗的粗軌跡提案,作為后續擴散過程的強引導。這種“錨點先粗擬合、擴散再精修正”的混合范式,有效模擬了人類先確定大方向、再不斷微調的決策過程。既保留了判別式方法的穩定和高效,又充分發揮了擴散模型在多模態軌跡建模上的優勢。
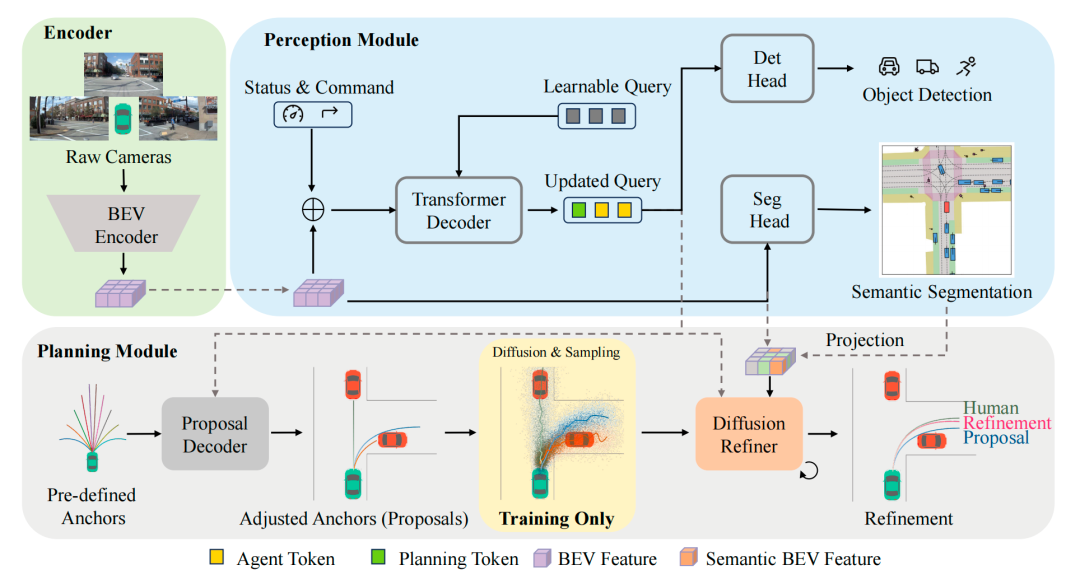
細粒度語義交互,讓規劃“看懂場景”
為了讓規劃真正“看懂場景”、貼合道路與交通參與者,DiffRefiner 設計了 Fine-Grained Semantic Interaction Module (FGSIM) 細粒度語義交互模塊。該模塊分兩步工作:先通過跨注意力將軌跡特征與可行駛區域等 BEV 語義區域建立全局關聯,再通過可變形注意力聚焦于車道線、路口等關鍵局部結構和周圍動態目標,最后由門控融合網絡自適應地平衡全局上下文與局部細節。結合約束式擴散解碼器,DiffRefiner 能在極少的反推步數(甚至單步)內完成高質量精煉,實現真正可落地的實時端到端規劃。

刷新紀錄,雙基準達成SOTA性能
實驗數據顯示,在真實道路數據集 NAVSIM v2 和閉環仿真基準 Bench2Drive 上,DiffRefiner 都刷新了當前最優成績。在性能方面,DiffRefiner 在 NAVSIM v2 上取得 87.4 的 EPDMS,在 Bench2Drive 上獲得 87.1 的 Driving Score 和 71.4 的 Success Rate,雙雙刷新公開基準的最好記錄,并在合流、超車、禮讓、緊急制動等多項能力指標上領先現有方法,展現了在復雜交互場景中的強魯棒性與安全性。此外,消融實驗也進一步驗證了各組件的有效性。
近年來,端到端自動駕駛研究進展顯著,然而基于純回歸的方法在處理軌跡預測的多模態分布時存在固有局限。DiffRefiner 通過混合規劃范式與場景感知的擴散精煉機制,為這一挑戰提供了切實可行的解決方案,也為 Nullmax 端到端系統的性能提升與落地部署提供了新思路。
-
人工智能
+關注
關注
1819文章
50231瀏覽量
266610 -
模型
+關注
關注
1文章
3805瀏覽量
52232 -
自動駕駛
+關注
關注
794文章
14952瀏覽量
181095
原文標題:AAAI 2026召開 | Nullmax DiffRefiner:用擴散模型“畫”出更優軌跡,端到端規劃迎來“精調”時代
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Nullmax研發團隊靜態元素檢測和拓撲推理新成果入選CVPR 2026
后摩智能4篇論文入選人工智能頂會ICLR 2026
Nullmax在CES 2026展示基于瑞薩R-Car X5H芯片的軟件定義汽車解決方案
Nullmax VLA算法深度賦能黑芝麻智能華山A2000芯片
小鵬汽車與北京大學研究論文成功入選AAAI 2026
Nullmax感知規劃端到端大模型進化提速
時識科技聯合創新成果SpikeRAM芯片入選ISSCC 2026
Nullmax亮相GTM 2025全球科技出行大會

地平線五篇論文入選NeurIPS 2025與AAAI 2026

自動駕駛為什么要重視軌跡預測?

摩爾線程新一代大語言模型對齊框架URPO入選AAAI 2026

Nullmax端到端軌跡規劃論文入選AAAI 2026
Nullmax端到端自動駕駛最新研究成果入選ICCV 2025




 工商網監
工商網監
評論