") Nullmax端到端軌跡規(guī)劃論文入選AAAI 2026
Nullmax端到端軌跡規(guī)劃論文入選AAAI 2026

11月8日,全球人工智能頂會 AAAI 2026 公布論文錄用結(jié)果,Nullmax 研發(fā)團(tuán)隊的端到端軌跡規(guī)劃論文成功入選。該論文創(chuàng)新提出一種由粗到精的軌跡預(yù)測框架——DiffRefiner,能夠?qū)崿F(xiàn)更為靈活、精準(zhǔn)的軌跡預(yù)測。
AAAI (Association for the Advancement of Artificial Intelligence) 是人工智能領(lǐng)域最具影響力、歷史最悠久的頂級學(xué)術(shù)會議之一。該會議素以評審嚴(yán)格、競爭激烈著稱。此次 AAAI 2026 共吸引了全球范圍內(nèi)超過2.3萬篇論文投稿,投稿量創(chuàng)歷史新高,而最終錄用率僅為17.6%。
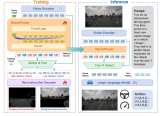
本次入選論文題為《DiffRefiner: Coarse to Fine Trajectory Planning via Diffusion Refinement with Semantic Interaction for End to End Autonomous Driving》,創(chuàng)新提出一種由粗到精軌跡預(yù)測框架——DiffRefiner。通過在生成式推理過程中融入判別式的軌跡粗解模塊,粗軌跡為生成式去噪提供了強(qiáng)有力的先驗(yàn)與引導(dǎo)。同時進(jìn)一步地設(shè)計了細(xì)粒度去噪解碼器,以增強(qiáng)場景約束的作用,使預(yù)測軌跡能更好地關(guān)注周圍的駕駛環(huán)境,從而提升精度。
本次論文的入選,標(biāo)志著Nullmax研發(fā)團(tuán)隊成果在相繼入選CVPR、ICCV、ECCV、WACV、ICRA、IROS等全球頂級會議及期刊后,進(jìn)一步實(shí)現(xiàn)了在智能駕駛端到端領(lǐng)域的持續(xù)深耕。
此項成果不僅體現(xiàn)了Nullmax在端到端技術(shù)領(lǐng)域的前沿研發(fā)實(shí)力,也為打造領(lǐng)先、優(yōu)質(zhì)的智駕產(chǎn)品積累了全鏈條技術(shù)優(yōu)勢。后續(xù),Nullmax將推出關(guān)于該技術(shù)成果的詳盡解讀,敬請關(guān)注!
-
人工智能
+關(guān)注
關(guān)注
1819文章
50238瀏覽量
266635 -
智能駕駛
+關(guān)注
關(guān)注
5文章
3029瀏覽量
51361
原文標(biāo)題:AAAI 2026公布!Nullmax端到端軌跡規(guī)劃論文入選
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
地平線11篇論文強(qiáng)勢入選CVPR 2026

Nullmax研發(fā)團(tuán)隊靜態(tài)元素檢測和拓?fù)渫评硇鲁晒?b class='flag-5'>入選CVPR 2026
自動駕駛端到端為什么會出現(xiàn)黑盒現(xiàn)象?

后摩智能4篇論文入選人工智能頂會ICLR 2026
Nullmax DiffRefiner軌跡預(yù)測框架入選AAAI 2026

Nullmax在CES 2026展示基于瑞薩R-Car X5H芯片的軟件定義汽車解決方案
Nullmax VLA算法深度賦能黑芝麻智能華山A2000芯片
小鵬汽車與北京大學(xué)研究論文成功入選AAAI 2026
Nullmax感知規(guī)劃端到端大模型進(jìn)化提速
地平線五篇論文入選NeurIPS 2025與AAAI 2026

摩爾線程新一代大語言模型對齊框架URPO入選AAAI 2026

自動駕駛中“一段式端到端”和“二段式端到端”有什么區(qū)別?

Nullmax端到端自動駕駛最新研究成果入選ICCV 2025

一文帶你厘清自動駕駛端到端架構(gòu)差異

Nullmax亮相2025上海車展汽車智能化峰會

- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區(qū)月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
評論