 固態變壓器(SST)中雙有源橋(DAB)高頻DC/DC變換器控制算法
固態變壓器(SST)中雙有源橋(DAB)高頻DC/DC變換器控制算法

固態變壓器(SST)中雙有源橋(DAB)高頻DC/DC變換器控制算法與經典代碼實現深度研究報告
BASiC Semiconductor基本半導體一級代理商傾佳電子(Changer Tech)是一家專注于功率半導體和新能源汽車連接器的分銷商。主要服務于中國工業電源、電力電子設備和新能源汽車產業鏈。傾佳電子聚焦于新能源、交通電動化和數字化轉型三大方向,代理并力推BASiC基本半導體SiC碳化硅MOSFET單管,SiC碳化硅MOSFET功率模塊,SiC模塊驅動板等功率半導體器件以及新能源汽車連接器。?
傾佳電子楊茜致力于推動國產SiC碳化硅模塊在電力電子應用中全面取代進口IGBT模塊,助力電力電子行業自主可控和產業升級!
傾佳電子楊茜咬住SiC碳化硅MOSFET功率器件三個必然,勇立功率半導體器件變革潮頭:
傾佳電子楊茜咬住SiC碳化硅MOSFET模塊全面取代IGBT模塊和IPM模塊的必然趨勢!
傾佳電子楊茜咬住SiC碳化硅MOSFET單管全面取代IGBT單管和大于650V的高壓硅MOSFET的必然趨勢!
傾佳電子楊茜咬住650V SiC碳化硅MOSFET單管全面取代SJ超結MOSFET和高壓GaN 器件的必然趨勢!
1. 引言:能源互聯網背景下的SST與DAB技術演進
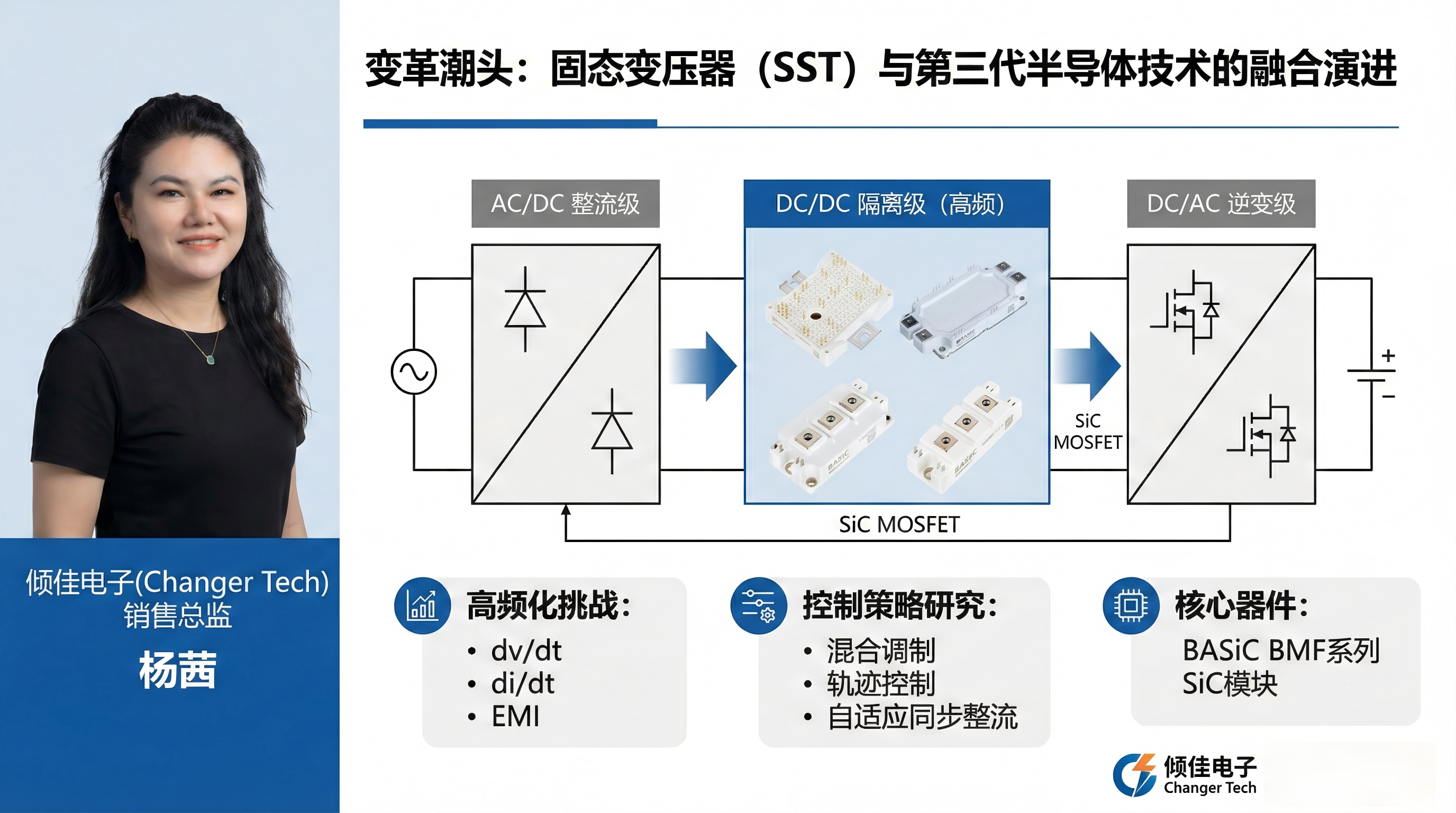
隨著全球能源結構的轉型與智能電網的推進,電力電子變壓器(Power Electronic Transformer, PET),亦稱為固態變壓器(Solid State Transformer, SST),正逐漸成為中高壓配電網與交直流混合微電網的核心樞紐。SST不僅具備傳統工頻變壓器的電壓變換與電氣隔離功能,還引入了無功補償、諧波抑制、電壓暫降穿越以及可再生能源接口等高級可控功能。在SST的三級式架構(AC/DC整流級、DC/DC隔離級、DC/AC逆變級)中,雙有源橋(Dual Active Bridge, DAB)變換器作為中間直流隔離級,承擔著功率雙向流動、電壓匹配及高頻電氣隔離的關鍵任務。
DAB變換器因其模塊化對稱結構、高功率密度以及實現軟開關(Soft-Switching)的潛力,成為SST中最受青睞的拓撲。然而,DAB在大功率、寬電壓范圍應用場景下面臨著巨大的技術挑戰,主要體現在輕載下零電壓開通(ZVS)失效導致的效率驟降、循環功率(Backflow Power)引起的電流應力增加,以及多模塊輸入串聯輸出并聯(ISOP)系統中的均壓與均流控制難題。
傾佳電子楊茜在對SST中DAB變換器的控制算法進行詳盡的剖析,涵蓋從經典的單移相(SPS)控制到高級的三移相(TPS)及模型預測控制(MPC)策略。同時,結合第三代寬禁帶半導體(SiC MOSFET)的器件特性,探討硬件參數對控制設計的影響,并提供基于工業界主流數字控制器(如TI C2000系列)的經典代碼實現方案,以期為高頻DC/DC變換器的研發提供極具價值的工程參考。
2. DAB變換器的工作機理與數學建模
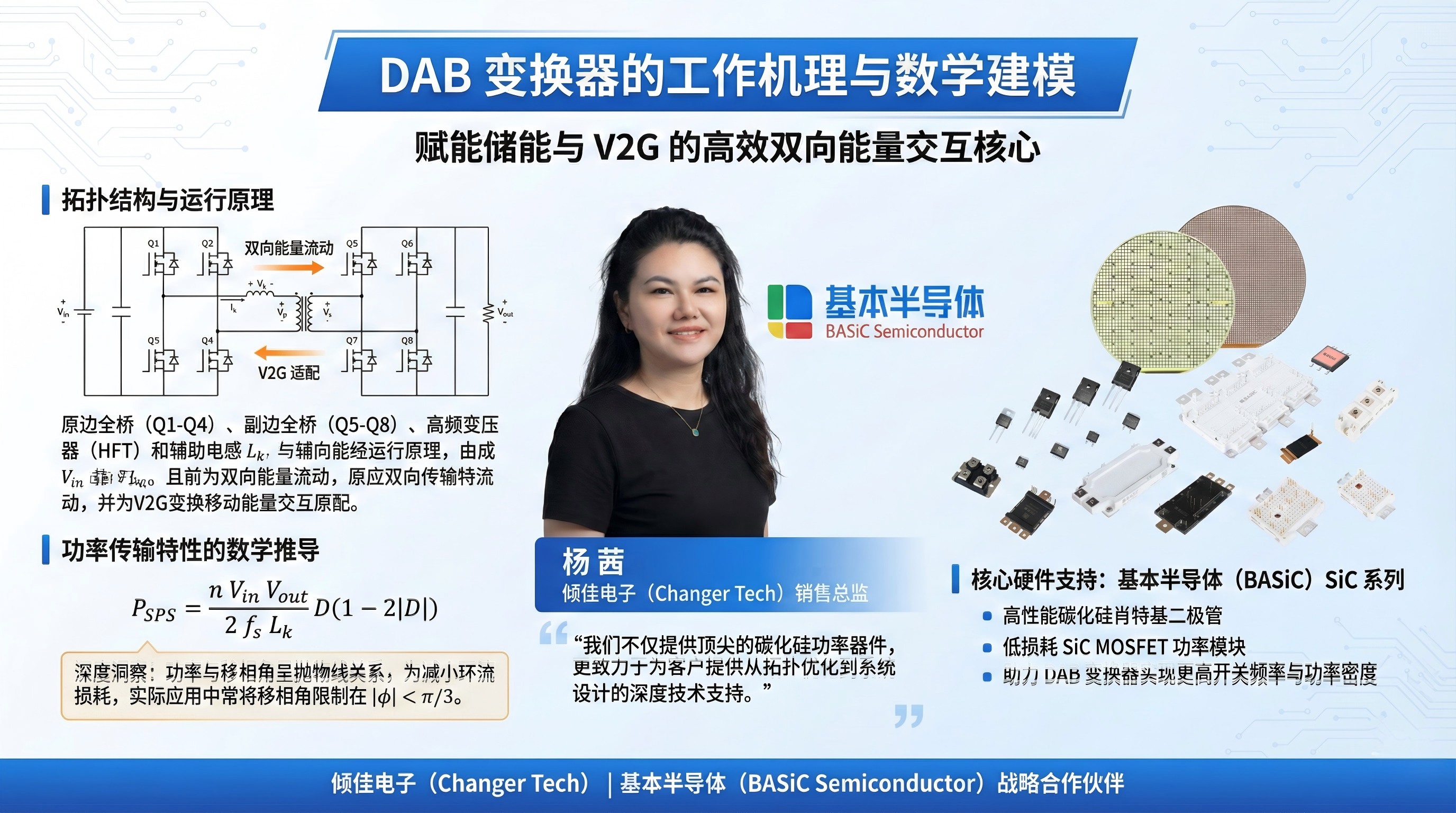
2.1 拓撲結構與運行原理
DAB變換器主要由原邊全橋、副邊全橋、高頻變壓器(HFT)以及輔助電感(或利用變壓器漏感Lk?)構成。其核心原理是利用原、副邊全橋產生兩個占空比通常為50%的高頻方波電壓vp?(t)和vs?(t),通過控制這兩個電壓源之間的相位差?(移相角),在電感Lk?上產生壓降,從而驅動功率流動。
在此拓撲中,功率傳輸的大小與方向由移相角?決定。當vp?超前vs?時,功率從原邊流向副邊;反之則反向流動。這種雙向流動的特性使得DAB天然適配于需要能量雙向交換的儲能系統與V2G(Vehicle-to-Grid)應用。
2.2 功率傳輸特性的數學推導
在經典的單移相(SPS)調制下,假設開關頻率為fs?,開關周期為Ts?=1/fs?,變壓器變比為n:1。定義歸一化移相比如下:
D=π??,D∈[?0.5,0.5]
電感電流iL?(t)的斜率由電感兩端的瞬時電壓決定。在一個開關周期內,電感電流呈分段線性變化。通過對電感電壓積分,可以推導出傳輸功率的解析表達式。對于SPS調制,平均傳輸功率P為:
PSPS?=2π2fs?Lk?nVin?Vout???(π?∣?∣)=2fs?Lk?nVin?Vout??D(1?2∣D∣)
其中,Vin?為原邊直流電壓,Vout?為副邊直流電壓。
深入洞察:
該功率公式揭示了DAB的非線性特性。功率與移相角呈拋物線關系,且在?=±π/2(即D=±0.25)時達到理論最大值。然而,在實際應用中,為了減小無功環流損耗,通常將工作點限制在較小的移相角范圍內(如∣?∣<π/3)。這也意味著在設計控制算法時,必須考慮到系統增益在不同工作點的變化,這對于線性控制器(如PI)的設計提出了魯棒性挑戰。
3. 高級調制策略與軟開關優化
雖然SPS調制簡單易行,但其僅利用了唯一的控制自由度(外移相角?)。當輸入輸出電壓比k=Vin?/(nVout?)偏離1時,SPS調制會導致巨大的電感峰值電流和回流功率,嚴重惡化變換器效率,并導致ZVS范圍縮窄。為解決這一問題,引入更多的控制自由度(內移相角)成為必然趨勢。

3.1 擴展移相(EPS)調制
擴展移相調制在SPS的基礎上,增加了一個內移相角D1?,通常施加在原邊全橋上,使其輸出電壓變為三電平波形(+Vin?,0,?Vin?),而副邊仍保持50%占空比的兩電平波形。
控制變量: 外移相角D??,原邊內移相角D1?。
優化目標: EPS主要用于降低回流功率(Backflow Power)。通過調節D1?,可以改變原邊電壓與電感電流的相位關系,使得在電壓不匹配(k=1)的情況下,減少電流反向流動的區間。
ZVS特性: EPS能夠顯著擴展原邊開關管的ZVS范圍,特別是在輕載條件下。通過KKT(Karush-Kuhn-Tucker)條件求解優化問題,可以得到使得回流功率最小的最優D1?和D??組合。
3.2 雙重移相(DPS)調制
DPS調制在原邊和副邊同時引入相同的內移相角D1?=D2?,再加上外移相角D??。
機理: 原副邊電壓均變為三電平波形。這種對稱的調制方式有利于降低變壓器的勵磁電流偏置,并在系統參數對稱時表現優異。
優勢: 相比SPS,DPS能顯著降低電感電流的峰值和有效值(RMS),從而減小磁性元件的銅損和開關管的導通損耗。
3.3 三重移相(TPS)調制
TPS是相移控制的終極形式,利用了所有三個自由度:原邊內移相D1?,副邊內移相D2?,以及外移相D??。
全局優化: TPS提供了最大的控制靈活性,理論上可以在任意電壓增益和負載條件下找到使總損耗(包括導通損耗和開關損耗)最小的最優解7。
實現復雜性: TPS的解空間極其復雜。TPS包含多達12種不同的工作模式。實時求解這些模式的最優解對控制器的算力要求極高。因此,工程實踐中常采用離線計算生成的查找表(LUT)或簡化的次優軌跡控制。
3.4 變頻調制(VFM)的引入
針對寬電壓范圍應用(如電動汽車充電,電池電壓變化范圍大),固定頻率的移相控制往往難以全范圍維持ZVS。
策略: VFM通過改變開關頻率fs?來調節等效阻抗。在輕載下提高頻率,可以削弱峰值電流,但在某些ZVS邊界處,降低頻率可能更有利于積累足夠的激磁能量來抽走結電容電荷。
混合控制: 結合SPS+VFM的混合控制策略,可以在極寬的負載范圍內(甚至低至10%額定功率)維持軟開關,顯著提升輕載效率。
3.5 調制策略對比總結表
| 調制策略 | 控制自由度 | 優點 | 缺點 | 適用場景 |
|---|---|---|---|---|
| SPS | 1 (D??) | 算法簡單,動態響應快,易于實現 | 輕載回流功率大,ZVS范圍窄,RMS電流高 | 電壓匹配度高,負載較穩定的場景 |
| EPS | 2 (D??,D1?) | 降低回流功率,擴展原邊ZVS | 副邊ZVS改善有限,控制略復雜 | 電壓不匹配,關注回流功率抑制的場景 |
| DPS | 2 (D??,Din?) | 降低電流峰值和RMS值 | 控制變量耦合,優化求解較難 | 對稱性較好的中高功率傳輸 |
| TPS | 3 (D??,D1?,D2?) | 全局最優效率,全范圍ZVS潛力 | 算法極復雜,需LUT或高性能DSP | 對效率要求極高的SST核心DC/DC級 |
| VFM | fs? + ? | 拓寬ZVS范圍至極輕載 | 磁性元件設計困難(需兼顧頻域),EMI濾波器設計復雜 | 寬輸出電壓范圍的EV充電器 |
4. 關鍵硬件參數對控制的影響:以SiC MOSFET為例
控制算法的設計不能脫離硬件特性。第三代寬禁帶半導體(SiC)的引入極大地提升了DAB的性能上限,但也對死區時間(Dead Time)和驅動控制提出了更嚴苛的要求。
4.1 BASiC Semiconductor SiC模塊特性分析
參考BASiC Semiconductor的BMF240R12KHB3 (1200V/240A) 和 BMF540R12MZA3 (1200V/540A) 模塊的數據手冊,我們能提取出對控制至關重要的參數19。
開關速度極快: BMF240R12KHB3的典型開通延遲td(on)?僅為65ns,上升時間tr?為37ns;關斷延遲td(off)?為110ns,下降時間tf?為36ns(@25°C)。這意味著SiC DAB可以工作在幾十kHz甚至上百kHz的頻率下。
極低的柵極電荷: 總柵極電荷QG?僅為672nC,這降低了驅動功率要求,允許更陡峭的驅動脈沖,從而減少開關損耗。
體二極管特性: SiC MOSFET的體二極管反向恢復電荷Qrr?極小,這對于DAB中經常出現的電流換流過程非常有利,減少了硬開關瞬間的電流尖峰。
4.2 死區時間(Dead Time)的計算與補償
死區時間是為了防止橋臂直通而設置的。然而,在DAB中,死區時間也是實現ZVS的關鍵窗口。過大的死區會導致電流過早反向,破壞ZVS條件;過小則可能導致直通或無法完全抽取結電容Coss?的電荷。
死區計算公式:
理論最小死區時間tdead?應滿足:
tdead?≥td(off)?+tf?+Iload_min?Coss(eq)??Vbus??
其中,Coss(eq)?是橋臂等效輸出電容(考慮上下管),Iloadm?in?是滯后橋臂在死區開始時的電感電流瞬時值[20]。對于SiC器件,由于Coss?具有強非線性且隨電壓變化,精確計算需積分電荷量。
死區效應與補償:
死區不僅影響ZVS,還會導致電壓波形畸變(電壓極性翻轉延遲),進而造成實際移相角與指令值產生偏差。這種偏差會導致功率傳輸誤差,特別是在高頻下,幾十納秒的誤差都會顯著影響精度。
補償算法: 在數字控制中,需根據電流極性動態調整PWM的比較值(CMPA/CMPB)。如果電流為正,實際脈寬會被死區“吞噬”,因此需要在指令中增加死區時間補償量;反之則減小。
5. SST中DAB的系統級控制策略
在SST應用中,DAB不僅僅是一個獨立的變換器,而是級聯系統中的一環。

5.1 輸入串聯輸出并聯(ISOP)電壓平衡控制
SST的中壓側通常由多個DAB模塊輸入串聯而成。由于模塊參數(如漏感、電容容值)的不一致,輸入電壓(電容電壓)會自動發散,導致個別模塊過壓。因此,**輸入電壓均壓(Input Voltage Sharing, IVS)**控制是必須的。
解耦控制架構:
輸出電壓環(由總功率決定): 所有的DAB模塊共享一個總的輸出電壓環,該環路輸出一個公共的移相角指令Dcommon?,用于調節總的輸出電壓或電流。
輸入均壓環(由個體差異決定): 每個模塊i都有一個獨立的均壓環。該環路檢測本模塊的輸入電壓Vin,i?與平均輸入電壓Vin,avg?的差值。
ΔVin,i?=Vin,i??N1?∑k=1N?Vin,k?
該誤差經過一個比例(P)或比例積分(PI)控制器,生成微調移相量Δdi?。
最終指令合成:
di?=Dcommon?+Δdi?
邏輯分析: 如果某模塊輸入電壓過高,說明其阻抗相對較大或處理功率不足。增加該模塊的移相角Δdi?(假設在單調區)會增加其傳輸功率,從而從輸入電容抽取更多電流,使其電壓下降,達到平衡。
5.2 軟啟動(Soft-Start)控制算法
DAB直接啟動會產生巨大的勵磁涌流和電容充電沖擊電流,可能瞬間擊穿SiC器件。SST的啟動必須遵循嚴格的時序。
三階段軟啟動策略:
階段一:開環占空比斜坡(Open Loop Duty Ramp):
此時副邊全橋所有開關保持關斷(利用體二極管整流)或同步整流但不移相。
原邊全橋開始發波,但占空比D從0緩慢增加到50%。這限制了施加在變壓器上的伏秒積,防止磁芯飽和與電流過沖。
階段二:移相角斜坡(Phase Shift Ramp):
當副邊電壓建立到一定水平,副邊開始發波,且初始移相角為0。
隨后,移相角?按預設斜率線性增加,直到達到閉環控制所需的初始值。
階段三:閉環切入(Closed Loop Handover):
當輸出電壓接近設定值,且系統狀態穩定后,激活PI控制器,接管移相角的控制權。此時需預置PI積分器的初值,以防止控制跳變(Bump)。
6. 基于TI C2000 MCU的經典代碼實現
數字控制器的實現細節直接決定了DAB的性能。TI的C2000系列(如TMS320F28379D, F280049C)憑借其高分辨率PWM(HRPWM)和強大的DSP核,是實現DAB控制的行業標準平臺。
6.1 ePWM模塊配置核心邏輯
實現移相控制的核心在于利用ePWM模塊的**同步(Synchronization)與相位加載(Phase Loading)**功能。
計數模式: 必須使用增減計數模式(Up-Down Count Mode) 。這不僅能產生對稱的PWM波形,減少諧波,還能保證在計數器零點和周期點更新寄存器,便于實現雙邊調制。
同步鏈: 原邊主橋(Master, 如ePWM1)配置為在CTR=0時發出同步脈沖(SYNCOUT)。副邊從橋(Slave, 如ePWM2)配置為在接收到SYNCIN時,將相位寄存器(TBPHS)的值加載到計數器(TBCTR)中。
TBPHS計算公式: 在增減計數模式下,一個完整的PWM周期包含2×TBPRD個時鐘周期。因此,180度的移相對應的時間計數值為TBPRD。
TBPHS_Ticks=180.0Phase_Degree?×TBPRD
注意:C2000的TBPHS寄存器行為受PHSDIR(相位方向)位控制。若要滯后(Lag),通常設置PHSDIR=1(向上計數)或加載特定的計數值。
6.2 經典C代碼結構
以下代碼展示了基于C2000的DAB控制核心部分的實現,包含結構體定義、移相更新函數以及控制中斷服務程序(ISR)。
6.2.1 控制結構體定義
為了代碼的可移植性和清晰度,采用結構體封裝DAB的狀態變量。
C
typedef struct {
// 測量值
float32_t V_out_meas; // 輸出電壓采樣
float32_t V_in_meas; // 輸入電壓采樣
float32_t I_out_meas; // 輸出電流采樣
// 設定值
float32_t V_out_ref; // 目標輸出電壓
// 控制輸出
float32_t phase_shift_ratio; // 歸一化移相比 d (-0.5 to 0.5)
uint16_t tbphs_ticks; // 寫入寄存器的計數值
// PI控制器狀態變量
float32_t err;
float32_t inte; // 積分項
float32_t Kp;
float32_t Ki;
float32_t out_max;
float32_t out_min;
// 軟啟動狀態
uint16_t soft_start_state; // 0: Idle, 1: Duty Ramp, 2: Phase Ramp, 3: Run
float32_t duty_ramp_val;
} DAB_Control_t;
DAB_Control_t dabCtrl;
6.2.2 移相更新函數 (Update Phase Shift)
此函數負責將計算出的移相角轉換為硬件寄存器值,并處理方向位。這是實現SPS/EPS調制的底層驅動核心。
C
// 更新ePWM2相對于ePWM1的移相角
// phase_ratio范圍: -0.5 (反向最大功率) 到 +0.5 (正向最大功率)
void DAB_UpdatePhase(float32_t phase_ratio) {
uint16_t period = EPwm1Regs.TBPRD;
int32_t shift_ticks;
// 1. 限幅保護
if (phase_ratio > 0.5f) phase_ratio = 0.5f;
if (phase_ratio < -0.5f) phase_ratio = -0.5f;
// 2. 計算計數值 (Up-Down Mode: 180度 = TBPRD)
// 假設 phase_ratio = 0.5 對應 90度移相
shift_ticks = (int32_t)(phase_ratio * 2.0f * (float32_t)period); // ratio 0.5 -> 1.0 * TBPRD???
// 修正公式: 移相角phi = pi * d. d=0.5 -> phi=pi/2 (90度).
// 180度對應TBPRD. 所以90度對應 TBPRD/2.
// 公式應為: ticks = ratio * 2 * (TBPRD)??? 不,推導如下:
// 全周期 = 360度 = 2*TBPRD.
// ratio = 1.0 對應 180度 (SPS最大范圍通常只到90度即ratio=0.5)
// 這里的ratio定義為 d = phi/pi. d=0.5 -> phi=pi/2.
// 對應時間 = (0.5 * pi) / (2*pi) * T_period = 1/4 T_period.
// T_period (ticks) = 2 * TBPRD.
// 所以 ticks = 1/4 * 2 * TBPRD = 0.5 * TBPRD.
shift_ticks = (int32_t)(phase_ratio * (float32_t)period); // 正確公式
// 3. 寫入寄存器并處理方向
// C2000的TBPHS加載邏輯: 當SYNC信號到來時, CTR = TBPHS.
// 為了實現滯后(Lag), 從機在同步時刻應加載一個較小的值或改變計數方向
if (shift_ticks >= 0) {
// 正向移相 (原邊超前副邊)
EPwm2Regs.TBPHS.bit.TBPHS = shift_ticks;
EPwm2Regs.TBCTL.bit.PHSDIR = 1; // Count Up after Sync (相當于滯后)
} else {
// 反向移相
EPwm2Regs.TBPHS.bit.TBPHS = -shift_ticks;
EPwm2Regs.TBCTL.bit.PHSDIR = 0; // Count Down after Sync
}
// 關鍵:啟用影子寄存器加載,防止波形抖動
// 這一步通常在初始化中配置: TBCTL2.bit.PRDLDSYNC = 1;
}
6.2.3 控制中斷服務程序 (ISR)
控制回路通常在ADC轉換結束中斷中執行。對于ISOP系統,還需在此處加入均壓算法。
C
#define ISR_FREQ 100000.0f // 100kHz
#define TS (1.0f/ISR_FREQ)
__interrupt void dab_control_isr(void) {
// 1. 讀取ADC采樣值并歸一化
dabCtrl.V_out_meas = (float32_t)AdcResultRegs.ADCRESULT0 * ADC_PU_SCALE;
dabCtrl.V_in_meas = (float32_t)AdcResultRegs.ADCRESULT1 * ADC_PU_SCALE;
// 2. 狀態機邏輯
if (dabCtrl.soft_start_state == 1) {
// 軟啟動階段1: 占空比斜坡 (EPS模式啟動)
dabCtrl.duty_ramp_val += 0.0001f;
if (dabCtrl.duty_ramp_val >= 0.5f) {
dabCtrl.duty_ramp_val = 0.5f;
dabCtrl.soft_start_state = 2; // 進入移相斜坡
}
// 更新原邊占空比寄存器 (CMPA/CMPB)
uint16_t cmp_val = (uint16_t)((1.0f - dabCtrl.duty_ramp_val) * EPwm1Regs.TBPRD);
EPwm1Regs.CMPA.bit.CMPA = cmp_val;
EPwm1Regs.CMPB.bit.CMPB = cmp_val; // 對稱
} else if (dabCtrl.soft_start_state == 2) {
// 軟啟動階段2: 移相角斜坡 (SPS模式, Duty=50%)
dabCtrl.phase_shift_ratio += 0.0001f;
if (dabCtrl.V_out_meas >= (dabCtrl.V_out_ref * 0.9f)) {
dabCtrl.soft_start_state = 3; // 切換到閉環
// PI積分器初始化, 保證無擾切換
dabCtrl.inte = dabCtrl.phase_shift_ratio;
}
DAB_UpdatePhase(dabCtrl.phase_shift_ratio);
} else {
// 3. 穩態閉環控制 (電壓環)
dabCtrl.err = dabCtrl.V_out_ref - dabCtrl.V_out_meas;
// 比例項
float32_t p_out = dabCtrl.Kp * dabCtrl.err;
// 積分項 (帶抗飽和)
dabCtrl.inte += dabCtrl.Ki * dabCtrl.err * TS;
if (dabCtrl.inte > dabCtrl.out_max) dabCtrl.inte = dabCtrl.out_max;
if (dabCtrl.inte < dabCtrl.out_min) dabCtrl.inte = dabCtrl.out_min;
// ISOP 均壓前饋 (假設有兩模塊, Vin_total已知)
// float32_t v_bal_term = K_bal * (dabCtrl.V_in_meas - (V_in_total * 0.5f));
// 平衡邏輯: 模塊電壓高 -> 增加移相角 -> 增加功率輸出 -> 泄放電容能量
float32_t total_out = p_out + dabCtrl.inte; // + v_bal_term;
// 輸出限幅
if (total_out > dabCtrl.out_max) total_out = dabCtrl.out_max;
if (total_out < dabCtrl.out_min) total_out = dabCtrl.out_min;
dabCtrl.phase_shift_ratio = total_out;
// 4. 更新硬件
DAB_UpdatePhase(dabCtrl.phase_shift_ratio);
}
// 5. 清除中斷標志
AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
7. 仿真與模型驗證
在硬件實現之前,基于模型的開發(MBD)是驗證控制算法的關鍵步驟。推薦使用MATLAB/Simulink或PLECS進行仿真。
模型搭建: 使用Simscape Electrical庫中的基本半導體MOSFET模塊搭建功率級,變壓器需包含漏感參數。
數字控制仿真: 推薦使用Simulink的C2000 Microcontroller Blockset。可以直接使用ePWM模塊進行配置,并在仿真環境中驗證死區設置和移相邏輯是否正確29。
ISOP驗證: 搭建兩個串聯輸入的DAB模塊,人為引入參數不一致(如Lk1?=Lk2?),驗證均壓環路是否能將兩個輸入電容電壓鉗位在Vin?/2。
8. 結論

深圳市傾佳電子有限公司(簡稱“傾佳電子”)是聚焦新能源與電力電子變革的核心推動者:
傾佳電子成立于2018年,總部位于深圳福田區,定位于功率半導體與新能源汽車連接器的專業分銷商,業務聚焦三大方向:
新能源:覆蓋光伏、儲能、充電基礎設施;
交通電動化:服務新能源汽車三電系統(電控、電池、電機)及高壓平臺升級;
數字化轉型:支持AI算力電源、數據中心等新型電力電子應用。
公司以“推動國產SiC替代進口、加速能源低碳轉型”為使命,響應國家“雙碳”政策(碳達峰、碳中和),致力于降低電力電子系統能耗。代理并力推BASiC基本半導體SiC碳化硅MOSFET單管,BASiC基本半導體SiC碳化硅MOSFET功率模塊,BASiC基本半導體SiC模塊驅動板等功率半導體器件以及新能源汽車連接器。
SST中的DAB變換器控制是一個涉及多物理場、多時間尺度的復雜工程。從底層的SiC器件驅動與死區補償,到中層的SPS/TPS調制算法,再到頂層的ISOP均壓與軟啟動策略,每一個環節都決定了最終系統的效率與可靠性。
通過深入分析BASiC Semiconductor的SiC模塊特性,結合TI C2000強大的數字控制能力,提供了一套完整的工程實現路徑。SPS調制雖然經典,但在SST的高壓大功率場景下,必須結合EPS/TPS優化以及VFM變頻控制來應對輕載效率挑戰。同時,提供的C代碼框架解決了最棘手的移相寄存器配置與時序同步問題,為實際工程開發奠定了堅實基礎。未來的研究方向將更多聚焦于基于AI的數據驅動控制(如強化學習)在DAB全工況尋優中的應用。
審核編輯 黃宇
-
SST
+關注
關注
0文章
108瀏覽量
36092 -
DAB
+關注
關注
1文章
33瀏覽量
15493 -
固態變壓器
+關注
關注
1文章
86瀏覽量
3437
發布評論請先 登錄
ED3半橋SiC模塊構建固態變壓器(SST)的隔離級DAB DC-DC的設計方案

62mm半橋SiC模塊設計固態變壓器 (SST) DAB的工程落地

100kW的SST固態變壓器高頻 DAB 隔離直流變換器設計與驗證

SST固態變壓器多變量強耦合控制策略的非線性非穩態問題的對策

SST固態變壓器級聯架構下分布式直流母線電壓均壓問題的對策

固態變壓器DC/DC隔離級DAB變換器代碼

固態變壓器SST配套SiC功率模塊直流固態斷路器的技術發展趨勢


基于半橋SiC模塊特性的SST固態變壓器高頻DC/DC級雙有源橋(DAB)變換器控制策略






 工商網監
工商網監
評論