 DRV8106-Q1:汽車半橋智能柵極驅動器的技術剖析與應用指南
DRV8106-Q1:汽車半橋智能柵極驅動器的技術剖析與應用指南

DRV8106-Q1:汽車半橋智能柵極驅動器的技術剖析與應用指南
在汽車電子系統中,電機控制和驅動的穩定性與可靠性至關重要。DRV8106-Q1作為一款專為汽車應用設計的半橋智能柵極驅動器,憑借其高度集成的特性和豐富的功能,為汽車刷式直流電機、電磁閥和繼電器等應用提供了理想的解決方案。本文將深入剖析DRV8106-Q1的技術特點、工作原理以及應用設計要點,希望能為電子工程師們在實際項目中提供有價值的參考。
文件下載:drv8106-q1.pdf
一、DRV8106-Q1核心特性
1.1 高集成與寬電壓范圍
DRV8106-Q1是一款高度集成的半橋柵極驅動器,能夠驅動高端和低端N溝道功率MOSFET。其工作電壓范圍為4.9V至37V(絕對最大40V),通過集成的倍壓電荷泵為高端MOSFET生成合適的柵極驅動電壓,為低端MOSFET則采用線性穩壓器。這種設計不僅能適應不同的電源環境,還能確保在寬電壓范圍內穩定工作。
1.2 智能柵極驅動架構
采用智能柵極驅動架構,該架構具有諸多優勢。它可以優化死區時間,避免直通現象,有效提高系統的可靠性。同時,通過可調的柵極驅動電流,能夠控制MOSFET的轉換速率,從而降低電磁干擾(EMI)。此外,還配備了(V{DS})和(V{GS})監測器,可有效保護MOSFET免受漏源和柵極短路的影響。柵極驅動器的峰值源電流和峰值灌電流均可在0.5mA至62mA之間進行配置,為不同的應用需求提供了靈活的選擇。
1.3 寬共模電流檢測放大器
集成了寬共模分流放大器,支持在線、高端或低端電流檢測方式。該放大器具有可調增益設置(10、20、40、80 V/V),并集成了反饋電阻,可根據實際需求進行靈活調整。同時,還具備可調的PWM消隱方案,能夠在循環窗口期間持續測量電機電流,為電機控制提供準確的電流反饋。
1.4 多接口與保護功能
提供多種接口選項,包括SPI和硬件(H/W)接口。SPI接口可實現詳細的配置和診斷功能,而硬件接口則簡化了控制,減少了MCU的引腳使用。此外,還具備集成的保護功能,如專用的驅動器禁用引腳(DRVOFF)、電源和穩壓器電壓監測器、MOSFET (V{DS})過流監測器、MOSFET (V{GS})柵極故障監測器等,能夠有效保護器件和系統免受各種故障的影響。
二、工作模式與狀態切換
2.1 睡眠狀態
當nSLEEP引腳為低電平或DVDD電源低于(V_{DVDD_POR})閾值時,器件進入低功耗睡眠狀態。此時,除了nSLEEP引腳的低功耗監測器外,所有主要功能模塊均被禁用,同時為外部MOSFET的柵極提供被動下拉電阻,確保MOSFET處于關斷狀態,從而降低器件的靜態電流消耗。
2.2 待機狀態
當nSLEEP引腳為高電平且DVDD輸入超過(V{DVDD_POR})閾值時,器件在經過(t{WAKE})延遲后進入上電待機狀態。此時,數字核心和SPI通信將處于活動狀態,但電荷泵和柵極驅動器仍保持禁用狀態,直到PVDD輸入超過(V_{PVDD_UV})閾值。在該狀態下,可以對SPI寄存器進行編程并報告故障信息,但無法進行柵極驅動器操作。
2.3 工作狀態
當nSLEEP引腳為高電平,DVDD輸入超過(V{DVDD_POR})閾值,且PVDD輸入超過(V{PVDD_UV})閾值時,器件進入全工作狀態。此時,除柵極驅動器外的所有主要功能模塊均處于活動狀態。柵極驅動器必須通過EN_DRV寄存器位啟用后,才能開始進行全功能操作。對于硬件接口的器件,在工作狀態下將自動啟用驅動器。
三、應用設計要點
3.1 典型應用場景
DRV8106-Q1的典型應用是控制外部MOSFET半橋,用于單向刷式直流電機控制。在實際應用中,需要根據具體的設計要求選擇合適的外部組件,并進行合理的布局和布線。
3.2 設計參數與計算
3.2.1 電荷泵負載計算
在設計過程中,需要確保DRV8106-Q1的電荷泵負載能力足以滿足MOSFET和PWM頻率的要求。可使用公式(V{CP}(A)=Q{G}(C) × f{PWM}(Hz) × # of switching HS FEIs)計算電荷泵的輸出負載電流。例如,當(Q{G}=30nC),(f{PWM}=20kHz),且只有一個高端MOSFET開關時,(V{CP}=30nC × 20kHz × 1 = 0.6mA),表明在這種情況下電荷泵的輸出負載能力是足夠的。
3.2.2 柵極驅動電流計算
柵極驅動電流強度(I{DRIVE})的選擇應基于外部MOSFET的柵極至漏極電荷以及開關節點的目標上升和下降時間。如果(I{DRIVE})選擇過低,MOSFET可能無法在配置的(t{DRIVE})時間內完全導通或關斷,從而導致柵極故障。同時,緩慢的上升和下降時間會增加外部功率MOSFET的開關功率損耗。可使用公式(I{DRIVEP}=Q{GD} / t{rise})和(I{DRIVEN}=Q{GD} / t{fall})分別計算源電流和灌電流。例如,當(Q{GD}=5nC),(t{rise}=750ns),(t{fall}=250ns)時,(I{DRIVEP}=5nC / 750ns ≈ 6.67mA),(I{DRIVEN}=5nC / 250ns = 20mA)。在實際應用中,建議在系統中使用所需的外部MOSFET和負載來驗證這些值,以確定最佳設置。
3.2.3 電流檢測放大器配置
DRV8106-Q1的差分分流放大器增益和分流電阻值的選擇應基于可用的動態輸出范圍、分流電阻的功率額定值以及需要測量的最大電機電流。在雙向電流檢測模式下,放大器輸出的動態范圍可通過公式(V{SO{BI}}=(V{AREF}-0.25V)-(V{AREF} / 2))計算;在單向電流檢測模式下,可通過修改CSADIV SPI寄存器設置來擴展動態范圍,計算公式為(V{SO{UNI}}=(V{AREF}-0.25V)-(V{AREF} / 8))。例如,當(V{AREF}=3.3V)時,(V{SO{BI}}=(3.3V - 0.25V) - (3.3V / 2) = 1.4V),(V{SO{UNI}}=(3.3V - 0.25V) - (3.3V / 8) = 2.6375V)。同時,外部分流電阻值和放大器增益設置應滿足(R{SHUNT}
3.2.4 功耗計算
在高溫環境下,需要估計驅動器的內部自發熱情況。內部功耗主要由高端驅動器功耗(P{HS})、低端驅動器功耗(P{LS})、PVDD電池電源功耗(P{PVDD})和DVDD/AREF邏輯/參考電源功耗(P{VCC})四部分組成。可使用公式(P{HS}(W)=I{HS}(A) × V{PVDD} × 2)、(P{LS}(W)=I{LS}(A) × V{PVDD})、(P{PVDD}(W)=I{PVDD}(A) × V{PVDD})和(P{VCC}(W)=(I{DVDD}(A) × V{DVDD}) + (I{AREF}(A) × V{AREF}))進行計算。例如,當(I{HS}=I{LS}=0.6mA),(V{PVDD}=12V),(I{PVDD}=2mA),(I{DVDD}=3.5mA),(I{AREF}=1mA),(V{DVDD}=3.3V)時,(P{HS}=0.6mA × 12V × 2 = 0.0144W),(P{LS}=0.6mA × 12V = 0.0072W),(P{PVDD}=2mA × 12V = 0.024W),(P{VCC}=(3.5mA × 3.3V) + (1mA × 3.3V) = 0.01485W)。然后,可使用公式(T{JUNCTION}(^{circ}C)=T{AMBIENT}(^{circ}C)+(R{theta, UA}(^{circ}C/W) × P{TOT}(W)))估計器件的結溫。假設(T{AMBIENT}=105^{circ}C),(R{theta, UA}=34.9^{circ}C/W),(P{TOT}=P{HS}+P{LS}+P{PVDD}+P{VCC}=0.0144W + 0.0072W + 0.024W + 0.01485W = 0.06045W),則(T_{JUNCTION}=105^{circ}C + (34.9^{circ}C/W × 0.06045W) ≈ 107.1^{circ}C)。
3.3 布局與布線
在PCB布局方面,需要遵循一些關鍵的指導原則。例如,使用低ESR陶瓷旁路電容將PVDD引腳旁路到GND引腳,推薦值為0.1μF,并將該電容盡可能靠近PVDD引腳放置,同時使用粗走線或接地平面連接到GND引腳。此外,還需要使用額定電壓為VM的大容量電容對PVDD引腳進行旁路,該電容至少為10μF,可與外部功率MOSFET的大容量電容共享。在外部MOSFET的高電流路徑上,也需要額外的大容量電容進行旁路,以減少高電流路徑的長度,并使用盡可能寬的連接金屬走線和多個過孔連接PCB層,以降低電感并確保大容量電容能夠快速提供高電流。
四、總結與展望
DRV8106-Q1以其高度集成的設計、智能的柵極驅動架構、寬共模電流檢測放大器以及豐富的保護功能,為汽車刷式直流電機控制等應用提供了強大而可靠的解決方案。在實際應用中,電子工程師們需要根據具體的設計要求,合理選擇外部組件,進行準確的參數計算,并遵循正確的布局和布線原則,以充分發揮DRV8106-Q1的性能優勢。隨著汽車電子技術的不斷發展,相信DRV8106-Q1將在更多的應用場景中展現出其卓越的性能和價值。
各位工程師朋友們,在使用DRV8106-Q1的過程中,你們遇到過哪些挑戰和問題呢?又是如何解決的呢?歡迎在評論區分享你們的經驗和見解。
-
汽車電子
+關注
關注
3045文章
8956瀏覽量
172794 -
柵極驅動器
+關注
關注
8文章
1488瀏覽量
40390
發布評論請先 登錄
汽車級單H橋柵極驅動器DRV870x-Q1的深度解析與應用指南
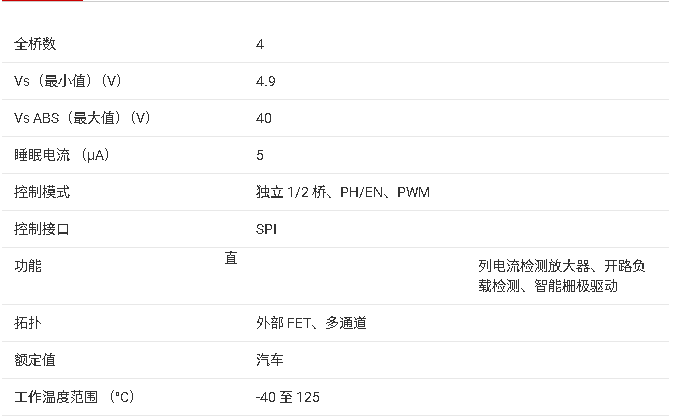
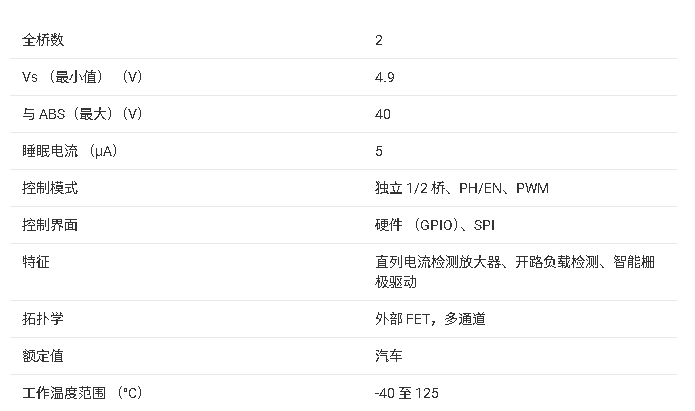
DRV89xx-Q1 汽車多通道半橋驅動器:特性、應用與設計要點
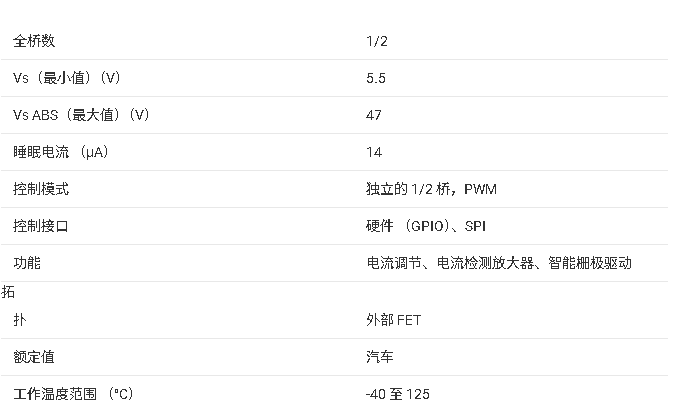
DRV8703D-Q1 汽車用 47V 半橋智能柵極驅動器技術手冊
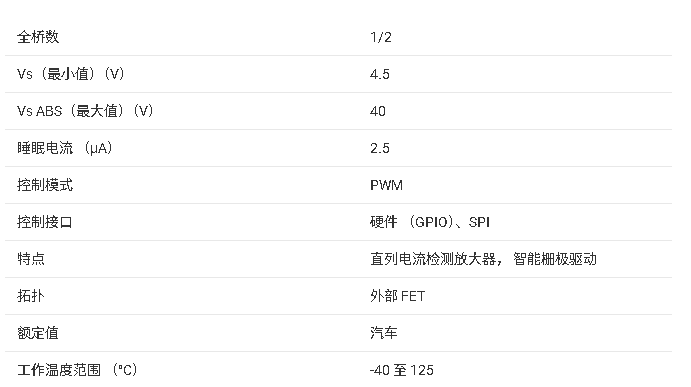
?DRV8106-Q1 汽車級半橋智能柵極驅動器技術文檔總結?
DRV8718-Q1智能半橋柵極驅動器技術文檔總結
DRV8714-Q1智能半橋柵極驅動器概述



 工商網監
工商網監
評論