 康謀直播Q A | 康謀智駕仿真測試,共筑智駕安全的「信任密碼」!
康謀直播Q A | 康謀智駕仿真測試,共筑智駕安全的「信任密碼」!

12月29日下午,康謀智駕仿真測試,共筑智駕安全的「信任密碼」”線上研討會圓滿結束,感謝各位觀眾的支持與互動。
在直播評論區,康謀感受到了大家的熱情!再次感謝大家的積極提問,促進了更多的交流與學習。本文匯總了15個直播熱點問題并邀請講師做詳細解答,請查收!(上下滑動可以瀏覽全部Q&A內容)。此外點擊閱讀原文,即可觀看直播回放!
下期「汽車多總線數據采集與分析:方案搭建與應用」直播將于2026年1月20日開講,敬請關注!
此外,文末附獲獎名單,大家快來聯系小助手兌獎啦!
量產應用主題Q&A
Q
PPT中有一個1R1V的HIL測試系統,似乎在感知傳感器方面使用的都是暗箱形式,是否可以直接通過仿真器配合相關硬件(例如GMSL板卡)形式直接發送圖像數據?
A
現在HIL使用圖像板卡注入是普遍的。值得注意的是不同廠商的驅動和數據流處理是不一樣的,如果要進行數據注入的開發,需要將這些輸出弄清楚,才能避免一些在圖像注入時的坑。所以在使用 GMSL 板卡進行注入前,需要找到一家能夠提供適配您 ECU 接口驅動的供應商。
Q
場景搭建方面,案例中似乎主要使用的還是OpenDRIVE+OpenSCENARIO,但這個如何保證仿真環境真實度?
A
仿真場景的真實度和OpenDrive和OpenScenario本身并沒有太多關系,因為他們相當于是數據格式的一種定義。
對于仿真場景真實度,需要關注被測對象。例如測試感知算法,那就要保證輸入的視頻流要足夠真實,在仿真環境中就要有足夠真實的傳感器模型。并且,組建一套滿足所有測試要求的仿真環境是困難的,通常還是根據想要測試的環節,使用特定的數據源注入。
Q
對于算法閉環評估環節,量產常用的評估方法依然是case by case嗎?有沒有相對成型的方法論?
A
對于算法評測顯然case by case是不夠的。
1. 首先需要針對你評測的算法建立評價指標體系。也就是你要評價他什么;
2 .根據測評體系,去搭建你的仿真系統,解決怎么測的問題;
3. 每個評價目標,需要搭建數據庫和評價器metrics。
實踐來講,算法無非感知和規控。感知更注重環境、目標的探測精度評價;而規控更側重道路類型、目標車動作場景下的決策評價、規劃的軌跡線評價。
上下滑動,查看更多
置信度重構主題Q&A
Q
康謀的3DGS地圖是否支持相機的多機位觀測?觀測到的模型在怎樣的范圍內可以保持完整?
A
支持。3DGS 是一種顯式的 3D 表達,它不是 2D 貼圖。所以在理論上,你可以在這個場景里擺放任意數量、任意位置的虛擬相機都能獲得正確的透視關系和遮擋關系。
但是3DGS 的渲染質量高度依賴于采集時的觀測軌跡。如果仿真相機在采集軌跡的 ±2 到 3 米 范圍內移動(模擬換道、輕微的路徑規劃偏差),我們的 NeRF2GS 可以保證模型是完整的,但是把相機拉到 50 米高空去做上帝視角,或者移動到采集車從未看見過的墻角后方,只會看到偽影和變形。
Q
生成的3DGS地圖能否配置不同的天氣光照?如何實現光照度的反饋變化?
A
原生的 3DGS 做不到物理級的太陽光角變換,因為把光照信息固定在了高斯球諧函數里,在做到ISP解耦后可以通過調整虛擬傳感器的 ISO 和曝光策略來模擬光線變化,對于添加的Mesh動態元素來說,當改變環境光方向時,渲染引擎會計算 Mesh 車輛的 Shadow Map,并將其強行投影到 3DGS 的路面上。這實現了局部動態光照,26年上半年康謀將會發布GS場景的色彩分級和光線的重計算功能。
Q
傳感器模型偏差有哪些具體表現?
A
Camera的話同色異譜(看起來顏色一樣,但光譜響應不同)、ISP 噪聲模型不一致、HDR 動態范圍不足;LiDAR:反射率錯誤(忽略材質物理屬性)、光束發散角缺失、噪聲缺失;Radar:RCS缺失,缺失多普勒特征等。
Q
靜態場景失真如何影響自動駕駛算法?
A
幾何失真:重建路面與 HD Map 不對齊導致定位算法漂移 ,導致規劃決策錯誤(如壓線行駛)。紋理/光照失真:錯誤的陰影或高光,導致感知算法產生 False Positives(幽靈剎車)或 False Negatives(漏檢障礙物)。
Q
混合渲染如何去擬合3dgs和dynamic object的光照?讓物體看得更真?
A
目前陰影的部分會實時計算 Mesh 車輛的 Shadow Map,強制投影到 3DGS 的路面上,不同天氣下的重新光照計算可以拆解3DGS重回圖形學屬性,然后利用光線追蹤管線重新打光,或者在訓練階段走風格遷移的方式。
Q
置信度是否可以量化?像車輛動力學仿真模型或者相機等傳感器仿真模型或者仿真環境,如何評估這些仿真模型的置信度高或者是低?像車輛仿真模型,是否可以基于實車數據和仿真數據做一個對標,通過調整仿真參數來得到一個置信度相關較高的仿真模型?
A
列舉一些常見的量化指標:環境/傳感器:計算 幾何 RMSE(重投影誤差)、色彩 ΔE、 點云KL 散度。動力學:對比實車與仿真的橫擺角速度 (Yaw Rate) 和 側向加速度 曲線。記錄實車的控制輸入(方向盤、油門、剎車)和狀態輸出。在仿真中輸入同樣的控制指令。調整仿真參數(輪胎剛度、懸掛阻尼),最小化仿真與實車的輸出誤差,直到置信度達標(如誤差 < 5%)。
Q
可以介紹一下動態場景中真實交通流的構建方法嗎?如何確保準確性和交互的真實性?
A
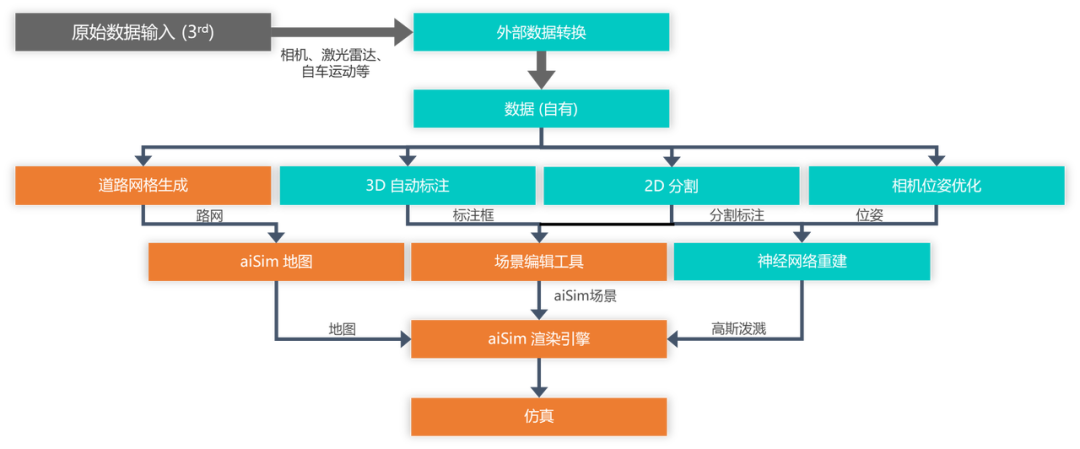
動態真實交通流會有Log2World的工具鏈,在重建NeRF2GS的過程中,從真實路采數據中提取交通流片段轉換成符合OpenSCENARIO標準的格式,然后在aiSim中使用,這個過程中自動標注出的交通流元素會具備足夠的特征信息和來實現軌跡的重建,如果是基于概率的方式重建交通流,也可以利用速分布、車頭時距、變道頻率 上的 Wasserstein 距離這些指標來看當前生成的場景的分布是否宏觀準確。
上下滑動,查看更多
虛擬數據集主題Q&A
Q
虛擬數據集可以用于感知評測嗎,與真實數據集相比優勢在哪?
A
可以用于感知模型的評測。與真實數據集相比,虛擬數據集構建的成本低,標注精度高,節省人力和時間成本。并且虛擬數據集能獲得豐富的場景,采集到真實路采中較少出現的corner cases。
Q
如何將該數據集用于感知模型訓練,格式適配度怎么樣?
A
simData目前完全符合nuScenes格式,可以用官方的SDK進行全部解析。對于使用nuScenes格式訓練的感知模型都是完美適配的。只需要修改不同的類別名就可以直接使用。同時,基于該格式,可以方便的轉換為waymo、kitt等數據集格式。
Q
對仿真生成數據的質量有什么檢測的方法和指標嗎?仿真數據給到算法訓練,是什么訓練方式呢,多少比例混合真實數據集,對算法的效果有實際驗證數據嗎?
A
可以使用感知模型進行評測。分別基于我們的simData虛擬數據集和nuScenes數據集訓練感知模型,設計了三組實驗來說明虛擬數據集與真實數據集的一致性以及對于模型性能的提升能力,具體可以查看我們的評測報告。指標用了mAP和NDS。
做評測的時候我們使用了純虛擬數據集訓練模型和真實數據集訓練的模型在虛擬數據集上進行微調。進行微調的模型展現出了更好的泛化能力。
上下滑動,查看更多
仿真加速落地主題Q&A
Q
在HIL測試中,aiSim這樣的仿真器扮演什么角色,要求仿真器具備什么樣的能力?
A
在HIL測試中,aiSim這樣的仿真器扮演著“虛擬世界生成器”與“傳感器數據源”的核心角色,負責替代真實的物理道路環境。
這就要求仿真器必須具備高保真的傳感器物理建模能力(能輸出通過物理渲染的Raw圖像、點云或雷達波形以“欺騙”感知算法)、確定性的實時運行能力(確保與ECU的時鐘毫秒級同步,不丟幀不卡頓)以及開放的硬件接口支持(能將數據流直接輸送給視頻注入板卡或CAN/以太網接口),從而在實驗室中構建出覆蓋邊緣場景的高置信度閉環測試環境。
Q
端到端的自動駕駛測試相比于傳統的自駕測試有什么區別,對仿真測試流程有什么新的要求?
A
傳統的自駕測試是高度解耦,可能將感知、規控等環節分開進行測試,每個環節有著不同的輸入源和輸出數據。
而端到端模型是一體化的,可能傳感器的數據輸入后,就直接得到最終的規控結果。這對仿真測試提出了全新要求,不能使用之前不同環節進行數據注入的方式,要求仿真器能提供高保真的傳感器數據,保證仿真測試環境與真實環境高度一致。并且測試指標有了新的變化,需要建立基于駕駛結果的全新閉環評價體系。
康謀下期直播預告
獲獎名單
康謀“智駕仿真測試,共筑智駕安全的「信任密碼」”線上研討會圓滿結束,非常感謝各位觀眾的支持與互動,以下是互動紅包獲獎名單,快來聯系小助手領獎!
本次未有邀請達人產生,期待大家下次積極參與(有效邀約人數:自動駕駛行業專業人士且填寫信息無誤。)
昵稱 | 紅包獎勵(元) | 聯系方式 |
Vito | 18.8 | 187****9119 |
Cloud | 18.8 | 178****7193 |
Beihai | 18.8 | 187****0120 |
不想錯過下一次的活動預告分享?
點擊上方卡片關注我們,及時獲取康謀資訊!
-
測試系統
+關注
關注
6文章
931瀏覽量
63828 -
HIL
+關注
關注
2文章
74瀏覽量
18306 -
仿真測試
+關注
關注
0文章
115瀏覽量
11801
發布評論請先 登錄
康謀新聞 | 康謀與Coppelia Robotics正式建立合作伙伴關系!

康謀攜aiSim亮相奇瑞-蓋世供應鏈技術共創交流日,共探智駕新未來!
邁向智駕高階驗證:康謀高保真HIL仿真解決方案,重塑測試價值
康謀直播| 汽車多總線數據采集與分析:方案搭建與應用
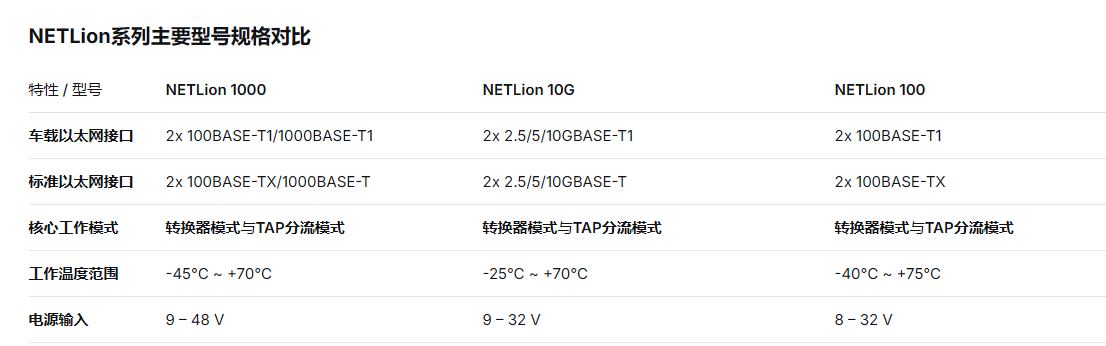
車載以太網轉換器怎么選?康謀 NETLion 系列:多場景適配、高性價比之選
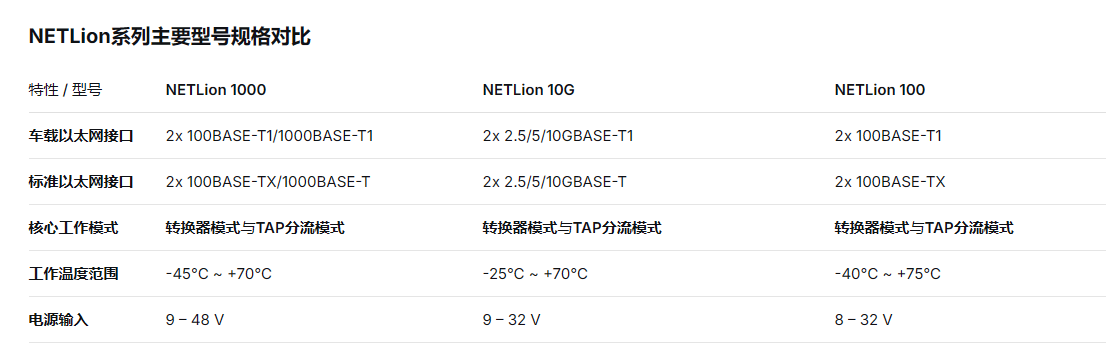
車載以太網轉換器:專業選擇指南與康謀NETLion系列深度解析
端到端自動駕駛仿真新范式:aiSim如何解決智駕測試的"災難性挑戰"

深度解析:康謀雙模態仿真測試解決方案!
L4級自動駕駛數據采集系統首選——康謀科技DATALynx ATX4 & BRICK系列全解析
康謀新聞 | 實力認證!康謀aiSim榮獲ASAM“自動駕駛仿真技術獎”
康謀 aiSim 攜經緯恒潤煥新 HIL 測試,誠邀集成商共建生態!
康謀新聞 | 康謀與Robotec.ai正式建立合作伙伴關系!
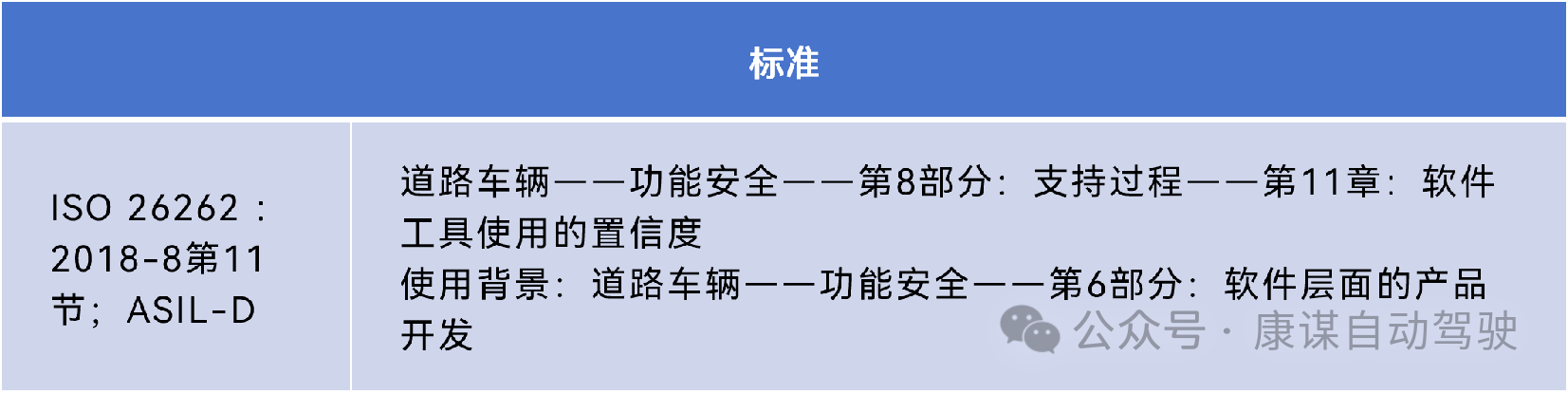
康謀新聞 | 康謀加入ASAM組織,全球首個ASIL-D認證自動駕駛仿真平臺aiSim引領安全新標桿

康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領安全新標桿
康謀分享 | 自動駕駛仿真進入“標準時代”:aiSim全面對接ASAM OpenX




 工商網監
工商網監
評論