") 深度解析:康謀雙模態(tài)仿真測(cè)試解決方案!
深度解析:康謀雙模態(tài)仿真測(cè)試解決方案!

▍文章來源于康謀自動(dòng)駕駛
隨著端到端自動(dòng)駕駛架構(gòu)的興起,傳統(tǒng)基于規(guī)則的仿真測(cè)試正面臨“真實(shí)感不足”與“場(chǎng)景泛化難”的雙重挑戰(zhàn)。
本文深入解析康謀推出的雙模態(tài)仿真測(cè)試解決方案:一方面依托aiSim提供確定性的物理級(jí)傳感器建模;另一方面通過World Extractor實(shí)現(xiàn)基于3DGS/NeRF的自動(dòng)化世界重建。
重點(diǎn)探討二者如何通過混合渲染(Hybrid Rendering)的技術(shù)路線,在保留真實(shí)世界視覺保真度的同時(shí),實(shí)現(xiàn)動(dòng)態(tài)交通流的泛化,構(gòu)建可用于閉環(huán)驗(yàn)證的數(shù)字孿生環(huán)境。
01 端到端測(cè)試挑戰(zhàn)
自動(dòng)駕駛仿真測(cè)試的核心矛盾,長(zhǎng)期存在于“物理真實(shí)性(Realism)”與“仿真可控性(Controllability)”之間。康謀基于此構(gòu)建了兩條既獨(dú)立又互補(bǔ)的技術(shù)路線,形成了完整的工具鏈生態(tài):
物理驅(qū)動(dòng)路線(Model-based):以 aiSim 仿真平臺(tái)為核心,基于高精度的3D網(wǎng)格與物理材質(zhì)系統(tǒng),提供ISO 26262 ASIL D認(rèn)證級(jí)的確定性仿真,側(cè)重于閉環(huán)驗(yàn)證、傳感器模型研究與極端邊緣場(chǎng)景構(gòu)造。
數(shù)據(jù)驅(qū)動(dòng)路線(Data-driven):以 World Extractor 工具鏈為核心,利用 3DGS 和 NeRF 技術(shù),將真實(shí)采集數(shù)據(jù)自動(dòng)化重建為高保真數(shù)字世界,側(cè)重于解決感知模型的Sim-to-Real Gap(虛實(shí)遷移差距)。
這兩條路線并非割裂,而是通過混合渲染架構(gòu)在終端匯聚,為高階智駕提供“靜態(tài)環(huán)境真實(shí)、動(dòng)態(tài)目標(biāo)可控”的閉環(huán)測(cè)試能力。

工具鏈總覽
02 aiSim:確定性高保真引擎
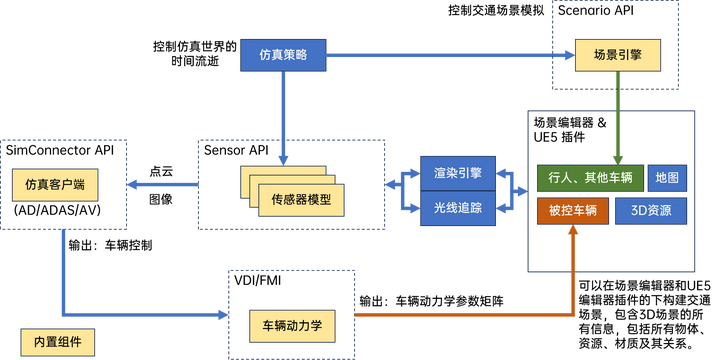
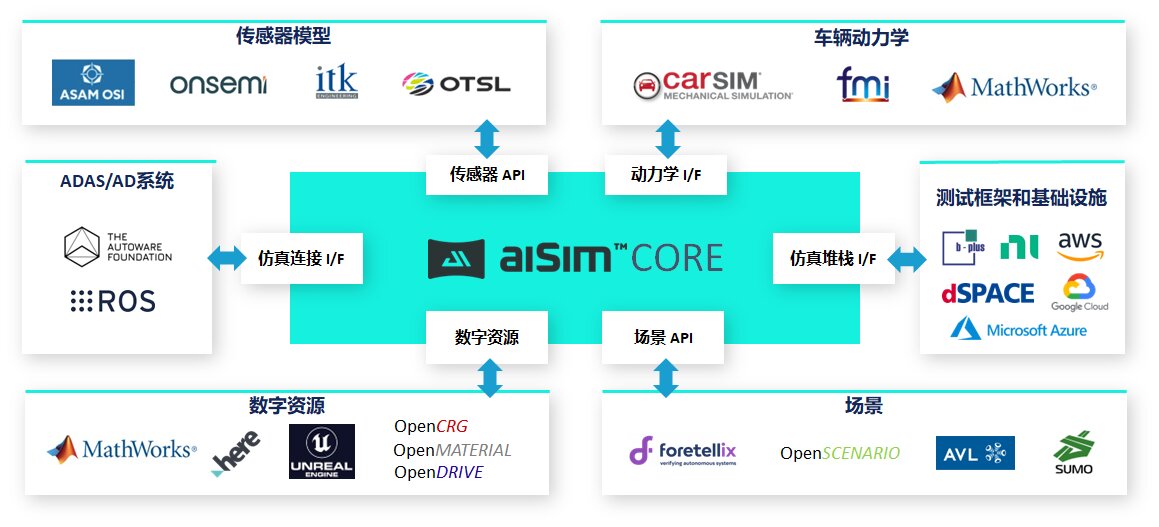
aiSim并非僅為神經(jīng)渲染服務(wù)的播放器,而是一款獨(dú)立的、基于物理的高性能仿真全棧仿真平臺(tái),集成了動(dòng)力學(xué)仿真、天氣環(huán)境系統(tǒng)、物理傳感器模型、場(chǎng)景編輯等自動(dòng)駕駛測(cè)試關(guān)鍵功能,并是全球首個(gè)通過 ISO 26262 ASIL D 認(rèn)證的仿真平臺(tái)。其核心價(jià)值在于為端到端智駕系統(tǒng)提供高保真的確定性輸出,并進(jìn)行有效閉環(huán)測(cè)試。

自研渲染引擎與確定性
不同于基于游戲引擎(如UE/Unity)的方案,aiSim 采用自研的基于 Vulkan API 的渲染管線。
確定性(Determinism):保證在不同硬件架構(gòu)(從工作站到云端大規(guī)模集群)上,同一幀場(chǎng)景的渲染結(jié)果在任意傳感器數(shù)據(jù)層面完全一致,包括像素、點(diǎn)云、動(dòng)力學(xué)信息。這對(duì)于回歸測(cè)試至關(guān)重要。
光線追蹤(Ray-tracing):支持對(duì)激光雷達(dá)(LiDAR)和雷達(dá)(Radar)進(jìn)行多徑反射仿真和高斯線束,并基于物理材質(zhì)屬性(PBR)計(jì)算反射率,非簡(jiǎn)單的幾何投影。
物理級(jí)傳感器建模
aiSim 并不止步于理想傳感器模型,而是深入到物理特性層面:
Camera:支持從光圈、畸變(F-theta/Mei/Ocam)、CFA(色彩濾光陣列)到ISP后處理的全鏈路仿真。
LiDAR:基于輻射測(cè)量(Radiometric)而非光度測(cè)量,考慮了905nm波長(zhǎng)下的材質(zhì)反射率、大氣衰減(雨霧中的Mie散射)以及卷簾門效應(yīng)(Rolling Shutter)。
Radar:采用光線追蹤模擬多徑效應(yīng),支持輸出RCS、多普勒速度及點(diǎn)云級(jí)別的仿真。
03 World Extractor:自動(dòng)化重建
針對(duì)傳統(tǒng)手工建模周期長(zhǎng)(月級(jí))、成本高的問題,World Extractor提供了一套從采集到重建的成熟可用的端到端自動(dòng)化工具鏈,將現(xiàn)實(shí)世界轉(zhuǎn)化為數(shù)字資產(chǎn)。

嚴(yán)格的硬件采集標(biāo)準(zhǔn)
高質(zhì)量的重建始于高質(zhì)量的數(shù)據(jù)。康謀定義了嚴(yán)格的傳感器部署規(guī)范以滿足神經(jīng)渲染需求:
覆蓋要求:相機(jī)需實(shí)現(xiàn)360°全覆蓋,相鄰視場(chǎng)重疊度需 >10°,以確保特征點(diǎn)匹配。
同步精度:多傳感器(Camera/LiDAR)與GNSS/INS的時(shí)間同步精度需 <1ms,位置誤差需控制在厘米級(jí)(RTK/PPK)。
推薦配置:采用Sony IMX490/728傳感器及128線激光雷達(dá),確保高動(dòng)態(tài)范圍與點(diǎn)云密度。
自動(dòng)化處理與3DGS訓(xùn)練
采集的數(shù)據(jù)經(jīng)過脫敏、清洗后,進(jìn)入自動(dòng)化標(biāo)注與訓(xùn)練流程:
動(dòng)態(tài)物體移除
這是重建純凈靜態(tài)世界的關(guān)鍵。工具鏈利用自動(dòng)化標(biāo)注算法(結(jié)合2D分割與3D包圍盒)識(shí)別并剔除路面上的移動(dòng)車輛與行人,僅保留靜態(tài)車輛建筑物、路面、植被、等靜態(tài)元素。
訓(xùn)練新范式
針對(duì)傳統(tǒng)3DGS在稀疏視角下幾何結(jié)構(gòu)崩壞以及外推能力差的問題,提出了NeRF2GS的新路徑。
Step 1 (Teacher):先訓(xùn)練一個(gè) NeRF 模型。利用 NeRF 在幾何連續(xù)性上的優(yōu)勢(shì),結(jié)合含噪聲的 LiDAR 點(diǎn)云進(jìn)行深度正則化(Depth Regularization)訓(xùn)練。
Step 2 (Student):將 NeRF 生成的高質(zhì)量深度圖和法線圖作為監(jiān)督信號(hào),初始化并訓(xùn)練 3DGS 模型。
優(yōu)勢(shì):這種方法顯著修復(fù)了路面、天空等弱紋理區(qū)域的幾何錯(cuò)誤,確保了在合成新視角(Novel View Synthesis)時(shí),路面平整、車道線清晰,且無偽影。
大規(guī)模分塊訓(xùn)練
針對(duì)城市級(jí)大規(guī)模場(chǎng)景(>100,000 m2),采用BEV空間動(dòng)態(tài)分塊(Block-based)策略,支持多GPU并行訓(xùn)練,通過重疊區(qū)域(Overlap)消除塊與塊之間的渲染接縫。
04 混合渲染以實(shí)現(xiàn)閉環(huán)測(cè)試
這是康謀方案的核心技術(shù)壁壘。單純的3DGS/NeRF雖然視覺逼真,但本質(zhì)是“三維錄像”,難以修改內(nèi)容。為了實(shí)現(xiàn)閉環(huán)測(cè)試(Closed-loop Testing),康謀采用了“混合渲染”技術(shù)。
Why “靜態(tài)3DGS + 動(dòng)態(tài)OpenSCENARIO”?
目前學(xué)術(shù)界存在的4DGS技術(shù)雖然能還原動(dòng)態(tài)場(chǎng)景,但缺乏交互性——你無法控制錄制視頻中車輛的剎車或變道。
康謀的策略是解耦:
背景(Background):使用World Extractor生成的靜態(tài)3DGS模型,確保環(huán)境的絕對(duì)真實(shí)(紋理、光照、幾何細(xì)節(jié))。
前景(Foreground):使用aiSim物理引擎生成的動(dòng)態(tài)網(wǎng)格(Mesh)物體(車輛、行人),這些物體的行為由 OpenSCENARIO 標(biāo)準(zhǔn)格式驅(qū)動(dòng),支持泛化和交互。
這種組合既滿足了感知算法對(duì)分布外(OOD)數(shù)據(jù)的渴求,又滿足了規(guī)控算法對(duì)交互式測(cè)試的需求。

深度合成技術(shù)
在渲染管線中,如何讓“虛擬的車”正確地行駛在“真實(shí)的路”上,并被“真實(shí)的樹”遮擋?這依賴于精確的深度合成(Depth Compositing)技術(shù):
系統(tǒng)實(shí)時(shí)計(jì)算3DGS背景的深度圖(Depth Map)與aiSim前景物體的Z-buffer。
遮擋關(guān)系:能夠精確處理“虛擬車輛行駛在真實(shí)樹木后方”的遮擋關(guān)系,且邊緣無鋸齒。
光照融合:利用從神經(jīng)場(chǎng)中提取的環(huán)境光照信息(IBL),照亮虛擬物體,使其陰影和反射與背景環(huán)境渾然一體。

aiSim+3DGS中DEVIANT單目識(shí)別CAR類
多模態(tài)一致性
對(duì)于 LiDAR 仿真,康謀并未采用簡(jiǎn)單的深度圖投影,而是實(shí)現(xiàn)了針對(duì)3D高斯球的光線追蹤。
機(jī)制:將3D高斯球作為代理幾何體(Proxy Geometry)構(gòu)建加速結(jié)構(gòu)(BVH)。LiDAR 射線直接與這些高斯球進(jìn)行求交計(jì)算。
多模態(tài)輸出:不僅能獲取距離信息,還能從神經(jīng)特征中解碼出強(qiáng)度(Intensity)信息,從而合成出帶有真實(shí)反射率特性的點(diǎn)云數(shù)據(jù)。
保證了Camera與LiDAR在同一時(shí)刻、同一視角下的時(shí)空強(qiáng)同步。
05 場(chǎng)景泛化與工程落地
基于上述架構(gòu),康謀實(shí)現(xiàn)了從“復(fù)現(xiàn)”到“泛化”的跨越。
動(dòng)態(tài)交通流泛化
在重建的高保真靜態(tài)地圖中,測(cè)試人員可以通過 OpenSCENARIO自由配置交通流。例如,在一段空曠的舊金山重建路段中,通過算法生成擁堵場(chǎng)景、Cut-in(切入)場(chǎng)景或事故場(chǎng)景。
這極大地?cái)U(kuò)展了ODD(運(yùn)行設(shè)計(jì)域)的覆蓋范圍,解決了感知算法在真實(shí)路測(cè)中難以遇到Corner Case的痛點(diǎn)。
廣泛的HiL集成
該工具鏈已在多個(gè)OEM及Tier 1中驗(yàn)證,支持與主流域控平臺(tái)的硬件在環(huán)(HiL)集成:
視頻注入:支持通過HDMI/DP或GMSL注入卡,將混合渲染后的視頻流直接注入域控制器(如NVIDIA Orin, NVIDIA Thorn, Horizon J6)。
實(shí)時(shí)性:在單節(jié)點(diǎn)部署下(如4卡仿真圖站),即可實(shí)現(xiàn)12路相機(jī)+激光雷達(dá)的高幀率實(shí)時(shí)仿真,通過分布式集群部署可進(jìn)一步提升性能表現(xiàn)和渲染質(zhì)量。
康謀的雙模態(tài)仿真測(cè)試解決方案,并非簡(jiǎn)單的工具堆疊,而是對(duì)自動(dòng)駕駛測(cè)試痛點(diǎn)的深刻工程解構(gòu)。
通過NeRF2GS技術(shù),我們將真實(shí)世界“搬進(jìn)”了仿真器;通過aiSim 物理引擎,我們讓這個(gè)世界“活”了起來。這種“靜態(tài)環(huán)境高保真,動(dòng)態(tài)場(chǎng)景全泛化”的混合渲染模式,為從感知到規(guī)控的端到端閉環(huán)驗(yàn)證提供了目前行業(yè)內(nèi)最優(yōu)的數(shù)據(jù)底座,顯著降低了對(duì)高成本路測(cè)的依賴!
-
傳感器
+關(guān)注
關(guān)注
2577文章
55193瀏覽量
792498 -
仿真測(cè)試
+關(guān)注
關(guān)注
0文章
115瀏覽量
11799 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
794文章
14920瀏覽量
180427
發(fā)布評(píng)論請(qǐng)先 登錄
康謀方案 | 從概念到生產(chǎn)的自動(dòng)駕駛軟件在環(huán)(SiL)測(cè)試解決方案
康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

康謀分享 | 3DGS:革新自動(dòng)駕駛仿真場(chǎng)景重建的關(guān)鍵技術(shù)

雙模態(tài)共振濾波器的特性影響分析
康謀新聞丨走進(jìn)康謀科技——您的自動(dòng)駕駛解決方案合作伙伴

康謀產(chǎn)品 | 為ADAS/AD開創(chuàng)的次世代AutoGI仿真工具
康謀分享|aiSim5基于生成式AI擴(kuò)大仿真測(cè)試范圍(終)

康謀分享 | 汽車仿真與AI的結(jié)合應(yīng)用

康謀新聞 | 康謀加入ASAM組織,全球首個(gè)ASIL-D認(rèn)證自動(dòng)駕駛仿真平臺(tái)aiSim引領(lǐng)安全新標(biāo)桿

康謀 aiSim 攜經(jīng)緯恒潤(rùn)煥新 HIL 測(cè)試,誠(chéng)邀集成商共建生態(tài)!

康謀新聞 | 實(shí)力認(rèn)證!康謀aiSim榮獲ASAM“自動(dòng)駕駛仿真技術(shù)獎(jiǎng)”
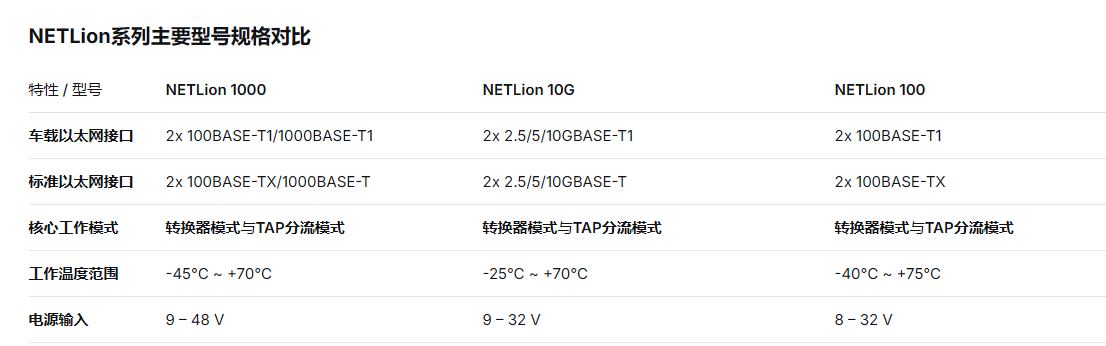
車載以太網(wǎng)轉(zhuǎn)換器:專業(yè)選擇指南與康謀NETLion系列深度解析
康謀直播Q A | 康謀智駕仿真測(cè)試,共筑智駕安全的「信任密碼」!
自動(dòng)駕駛仿真軟件推薦:康謀aiSim——ISO 26262 ASIL-D 認(rèn)證的高保真選擇
康謀新聞 | 康謀與Coppelia Robotics正式建立合作伙伴關(guān)系!



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論