 室內外融合定位技術從核心架構、技術原理到部署實施流程等詳解(二)
室內外融合定位技術從核心架構、技術原理到部署實施流程等詳解(二)

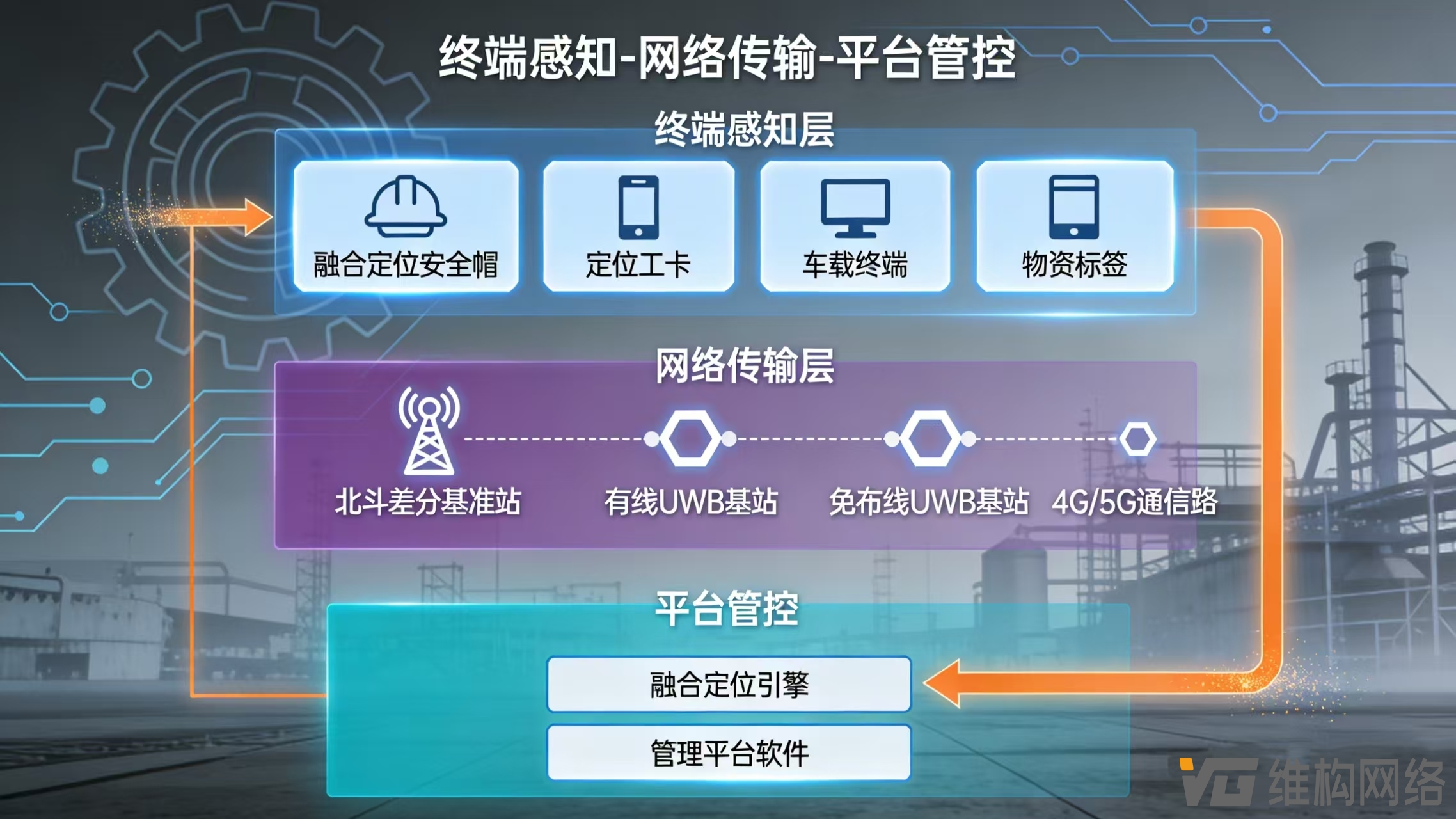
上篇[室內外融合定位系統從核心架構、技術原理到部署實施流程等詳解(一)-電子發燒友網]詳解了系統采用“終端-網絡-平臺”三層架構:終端集成北斗/UWB/IMU模塊,自動切換技術;網絡層由室外北斗差分站與室內UWB基站組成,支持多通信方式;平臺層通過融合算法統一解算位置,聯動安防系統。典型終端包括防爆安全帽、車載設備等,滿足高危環境需求,實現“室外高精度、室內無縫銜接”的精準管控。
二、室內外融合定位核心技術原理:從切換到融合的全流程解析
室內外融合定位的關鍵在于“精準場景識別、無縫技術切換、多源數據融合”,核心技術包括北斗RTK高精度定位、UWB定位、場景自適應切換、多源數據融合四大模塊。
1.室外北斗RTK高精度定位原理
室外場景采用北斗RTK(實時動態差分)技術,實現厘米級定位,核心是“基準站+移動站(終端)”的雙端協同:
(1)基準站接收北斗衛星信號,根據自身已知精確坐標,計算出衛星信號的誤差(含軌道誤差、鐘差、電離層延遲、對流層延遲);
(2)基準站通過通信網絡實時播發誤差修正數據;
(3)終端(移動站)同時接收北斗衛星信號與基準站修正數據,通過RTK算法消除大部分系統誤差,最終解算出厘米級精度的三維坐標(靜態精度±3cm,動態精度±5cm)。
適用場景:室外管廊、廠區道路、露天礦山等無遮擋區域,滿足人員越界預警、設備位移監控、車輛調度等高精度需求。
2.室內UWB定位原理
室內場景采用UWB超寬帶技術,利用納秒級窄脈沖信號的高時間分辨率實現精準測距定位,核心原理為三角定位/TDOA(到達時間差)定位:
(1)終端(UWB標簽)持續發送納秒級窄脈沖信號;
(2)多個UWB基站接收信號,記錄信號到達時間(或時間差);
(3)根據光速×傳播時間計算終端與各基站的距離,以基站為圓心、距離為半徑繪制圓,多個圓的交點即為終端的二維坐標;若需三維定位,需增加基站數量并獲取高程數據。
UWB定位優勢:抗金屬干擾能力強(多徑抑制算法),定位精度30-50cm,適合化工廠房、金屬管廊、地下隧道等衛星信號屏蔽的室內場景;支持存在性檢測、一維/二維/三維多種定位模式,可根據場景需求靈活選擇,平衡精度與成本。
3.場景自適應切換技術(無縫銜接核心)
切換技術的核心是“無感、無延遲、無斷點”,通過終端與引擎協同實現,分為三個核心步驟:
(1)場景識別:終端實時檢測北斗衛星信號強度(CN0值)與UWB基站信號強度(RSSI值),設定閾值判斷場景:衛星信號強(CN0≥40dB-Hz)且無UWB信號→室外場景;衛星信號弱(CN0<30dB-Hz)且有UWB信號→室內場景;兩者信號均存在→過渡場景。
(2)觸發切換:當檢測到場景變化時,終端觸發切換指令,同時啟動IMU慣性導航補盲(補盲時間0.5-2秒),避免切換瞬間定位中斷。例如,人員從室外進入廠房時,衛星信號逐漸減弱,當CN0值低于閾值,終端立即從北斗定位切換為UWB定位,切換延遲≤10ms。
(3)引擎融合校準:平臺融合引擎接收切換前后的北斗定位數據與UWB定位數據,通過卡爾曼濾波算法對位置進行平滑校準,確保切換前后軌跡連續,誤差≤10cm(約一個安全帽厚度),解決“一進車間就失聯”的痛點。
4.多源數據融合技術(精度保障核心)
當終端處于過渡區域(如廠房門口、管廊出入口)或單一技術定位精度不足時,融合引擎會整合北斗、UWB、IMU三類數據,通過算法迭代優化,輸出最優位置結果:
(1)北斗數據提供全局位置基準,UWB數據提供局部高精度校準,IMU數據補充短時間信號遮擋后的位置推測;
(2)采用聯邦卡爾曼濾波算法,將三類數據分為不同子系統,分別進行濾波處理后再融合,既保證定位精度,又提升系統穩定性,避免單一數據異常導致定位失效。
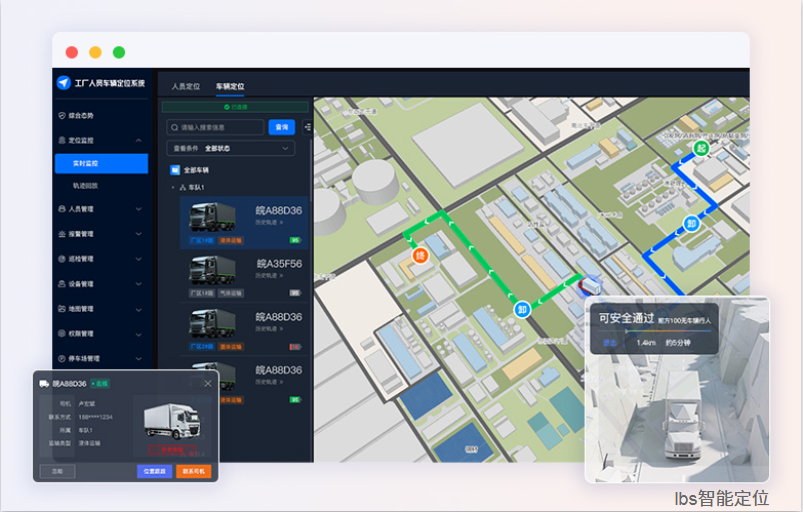
如果您想進一步了解維構lbs智能定位的技術和案例,歡迎搜索、關注、評論留言~
審核編輯 黃宇
-
定位
+關注
關注
5文章
1586瀏覽量
36695
發布評論請先 登錄
智慧工地人員定位從系統框架、核心功能到價值與趨勢詳解(二)

工廠人員定位軟件管理系統從部署實施流程、ROI分析到風險與避坑要點詳解(二)
北斗衛星導航定位技術從核心誤差修正方法、不同定位模式到工業場景融合應用詳解(二)
室內外融合定位技術從核心架構、技術原理到部署實施流程等詳解(三)
室內外融合定位系統從核心架構、技術原理到部署實施流程等詳解(一)
工廠人員定位工卡從部署實施、典型應用、成本與ROI分析等詳解(二)
藍牙定位追蹤技術:從技術原理、核心優勢詳解(一)
藍牙信標、UWB等主流室內定位無線技術的參數對比、核心算法和選型指南詳解(二)


基于北斗和藍牙beacon的室內北斗定位系統從原理到應用全面詳解(二)

基于北斗和藍牙beacon的室內北斗定位系統從原理到應用全面詳解(一)
RTK+藍牙融合定位系統在露天礦山的應用
石油煉化廠融合定位系統:技術解碼與場景應用

室內外電子工牌:北斗與藍牙融合定位的高效應用




 工商網監
工商網監
評論