 多物理場耦合失穩:論流場脈動、結構柔性與控制環路在航空雙系統直驅伺服閥閥芯振蕩中的交互機制
多物理場耦合失穩:論流場脈動、結構柔性與控制環路在航空雙系統直驅伺服閥閥芯振蕩中的交互機制

航空電液伺服閥作為飛行器舵面、起落架及剎車等高可靠性操控機構的核心控制元件,其性能直接決定了飛行控制的精準性、響應速度與飛行安全。傳統兩級伺服閥(如噴嘴擋板式)因結構復雜、工藝要求苛刻、抗污染能力弱,已成為機載液壓系統故障的主要來源之一。為滿足現代航空飛行控制對高可靠、大流量、高功率密度及多系統協同工作的迫切需求,直驅式電液伺服閥(Direct Drive Electro-Hydraulic Servo Valve, DDSV)應運而生,并成為當前研究的熱點。

其中,雙系統直驅伺服閥因其能夠直接驅動雙套對稱分布的液壓作動筒,實現同步聯動控制,在簡化系統架構、提升整體可靠性方面展現出顯著優勢。然而,直驅閥在摒棄了復雜的先導級液壓放大機構的同時,也面臨著閥芯運動穩定性這一核心挑戰。閥芯的高頻自激振蕩(頻率可達數百至數千赫茲)不僅會引發系統嘯叫、性能惡化,更會通過作動筒傳遞至氣動舵面,引發高頻抖動,加速結構疲勞,嚴重威脅飛行安全。因此,深入揭示航空雙系統直驅伺服閥閥芯振蕩的產生機理,并發展有效的抑制策略,是推動該技術成熟與應用的關鍵。本文系統闡述了雙系統直驅伺服閥的構造與工作原理,從流固耦合、瞬態空化、壓力脈動及機械傳動等多個維度剖析了閥芯振蕩的復雜成因,綜述了基于計算流體力學(CFD)的流場數值模擬與閥芯動力學建模方法,并探討了包括結構優化、先進控制算法(如自抗擾控制與模型預測控制)及智能監測在內的綜合抑制技術,最后對其未來發展趨勢進行了展望。
第一章:航空伺服閥的技術演進與挑戰
1.1 航空液壓控制與伺服閥的核心地位
在現代航空工業中,飛行控制(飛控)系統是確保飛機穩定操縱與安全飛行的神經中樞。飛控系統中的舵面(如副翼、方向舵、升降舵)、起落架收放及機輪剎車等關鍵操控機構,普遍采用以電液伺服閥為核心的電液控制系統。該系統接收來自飛行計算機的微弱電信號,并將其轉換為高功率的液壓能輸出,驅動作動筒產生精確的力和位移。伺服閥作為電-液轉換與功率放大的“咽喉”部件,其靜動態特性——包括精度、響應速度、線性度、滯環和穩定性——直接決定了整個飛控系統的性能天花板。
傳統上,航空領域廣泛使用兩級電液伺服閥,其典型代表為雙噴嘴擋板力反饋式伺服閥。這種閥通過力矩電機驅動擋板微位移,在先導級形成壓差來推動主閥芯運動,具有高精度和良好的動態響應。然而,其結構復雜,零件數量多,對油液清潔度要求極為苛刻(通常要求達到NAS 5級或更高),抗污染能力弱。先導級節流孔和噴嘴直徑微小,極易因固體顆粒污染物而發生堵塞或磨損,導致閥性能衰退甚至完全失效,據統計,傳統兩級伺服閥是航空液壓系統故障率最高的部件之一。

1.2 直驅伺服閥的興起與雙系統架構的必然性
為了從根本上提升可靠性與抗污染能力,直驅式電液伺服閥(DDSV)成為重要發展方向。DDSV摒棄了液壓先導級,采用大功率直線電機或旋轉電機(配合運動轉換機構)直接驅動主閥芯。這種結構簡化了閥內油路,增大了過流尺寸和閥芯行程,顯著增強了閥的抗污染能力,同時減少了潛在泄漏點,提高了可靠性。
航空飛行器(尤其是大型飛機)的舵面操控系統多采用左、右對稱分布的作動筒進行驅動,以實現冗余安全和力均衡。傳統方案需要兩套獨立的電液伺服閥及控制系統,不僅增加了系統復雜度和重量,還帶來了同步協調控制的難題。雙系統直驅伺服閥的創新設計,正是針對這一獨特需求而生。它將兩個四通滑閥的閥芯在機械上固結為一根“雙閥芯”,由同一個直線電機通過拉桿直接驅動。如此,單一閥體即可同步控制兩套液壓作動筒,實現真正的機械同步,極大地簡化了系統架構,提高了功率密度和可靠性。該設計理念已在部分先進飛機的舵面控制系統中得到應用驗證。
1.3 閥芯振蕩:高性能直驅伺服閥的阿喀琉斯之踵
盡管直驅閥在可靠性和結構簡化上優勢明顯,但也引入了新的技術挑戰,其中最突出的是閥芯的運動穩定性問題。傳統兩級閥中,主閥芯的運動受先導級液壓阻尼和力反饋彈簧的較強約束。而在直驅閥中,閥芯與驅動電機之間是直接的機械連接,傳動鏈的剛度、間隙以及閥芯所承受的復雜瞬態流體力的影響被放大,極易誘發閥芯的高頻自激振蕩。
這種振蕩并非由外部指令信號引起,而是系統內部流體動力、機械結構和控制環節相互作用下自發產生的。其表現形式為閥芯在指令位置附近發生數十至數千赫茲的高頻微小抖動,并可能伴隨尖銳的流體嘯叫聲。研究表明,振蕩與流場中的瞬態空化(氣穴)、壓力脈動、流體分離和剪切層不穩定性密切相關。閥芯振蕩會導致負載壓力或流量高頻脈動,使液壓作動筒產生“抖動”,這不僅影響控制精度,更會加速密封件和機械結構的疲勞失效,在極端情況下可能引發災難性后果。因此,深入研究雙系統直驅伺服閥閥芯振蕩的機理并發展有效的抑制方法,是突破其工程應用瓶頸、確保飛行安全的核心課題。

第二章:雙系統直驅伺服閥的核心構造與工作原理
2.1 總體結構與核心組件
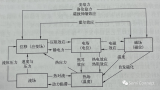
典型的航空用雙系統直驅伺服閥是一個高度集成的機電液一體化模塊,其主要由以下核心部分組成:
驅動單元:通常采用高功率密度、快速響應的永磁式直線力電機或音圈電機。該電機根據控制電流產生精確的電磁推力,是閥芯運動的直接動力源。
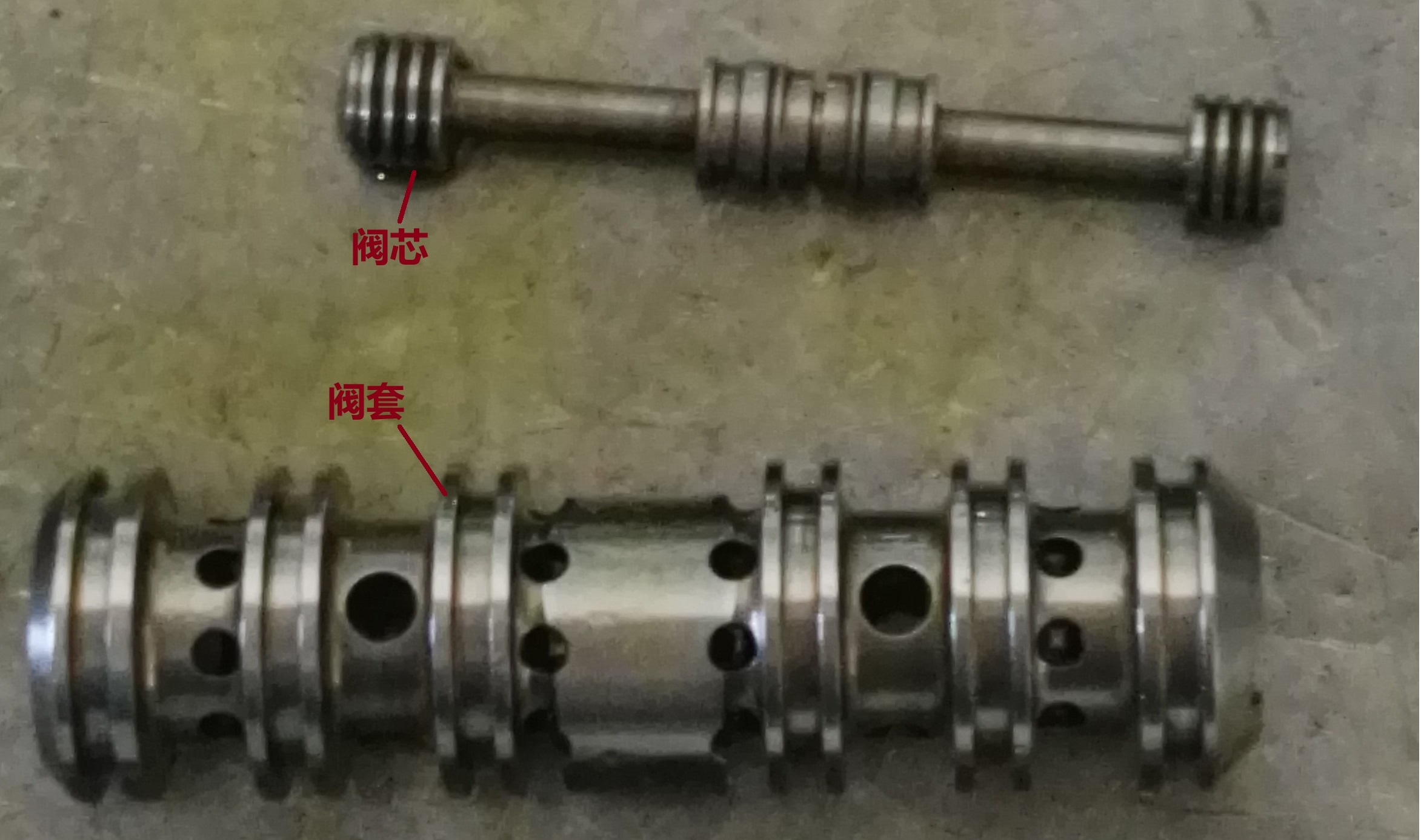
機械傳動與閥芯組件:這是雙系統設計的核心。一根由特種合金制成的細長拉桿將電機的動子與雙閥芯剛性連接。雙閥芯實質上是兩個四邊滑閥的閥芯在軸向上串聯并固結為一體的精密構件。每個閥芯段上通常有多個凸肩,與閥套上的對應窗口形成控制棱邊。
閥套與閥體:閥體內部壓裝有高精度閥套。對應于雙閥芯的每一段,閥套上均開設有供油口(P)、回油口(T)以及兩個負載控制口(A和B)。閥口形式常采用非全周開口(如矩形窗、圓形孔等),以優化流量增益特性。
傳感與反饋單元:高精度位移傳感器(如線性可變差動變壓器LVDT或磁致伸縮位移傳感器)實時測量閥芯的實際位移,其信號被反饋至閥內的專用控制器,構成閥芯位置的局部閉環,這是保證控制精度的關鍵。
集成電子控制器(IED):通常集成在閥體上或附近,負責接收上級飛行控制計算機的指令,驅動直線電機,并處理位移傳感器的反饋信號,實現閉環控制算法。先進的IED還具備狀態監測與故障診斷功能。
2.2 工作原理與雙系統同步機制
在初始零位(無控制信號),直線電機輸出力為零,復位機構(如對中彈簧)使雙閥芯處于中位。此時,P口封閉,A、B口均與T口有少量連通(零位開口設計),負載壓力為零。
當控制器接收到指令信號(通常為差分電壓或數字指令)后,經過解算和功率放大,向直線電機輸出相應的控制電流。電機產生推力,通過拉桿推動雙閥芯沿軸向運動。閥芯的位移改變了兩個獨立閥段內各控制窗口的開度。
對于單側閥段:假設閥芯右移,則P口與A口的通流面積增加,同時B口與T口的通流面積增加,從而推動該側連接的作動筒向一個方向運動;反之亦然。
對于雙側同步:由于兩個閥芯段固結在同一根桿上,直線電機的同一個動作,會完全同步地改變兩個獨立液壓回路的狀態。這意味著左、右兩個舵面作動筒將獲得完全同步的流量供應,從而實現精確的機械同步驅動,避免了傳統雙閥獨立控制可能存在的力紛爭(Force Fighting)問題。
位移傳感器持續監測閥芯的實際位置,并將信號反饋給IED。IED比較指令位置與實際位置,通過控制算法(如PID、自適應控制等)實時調整電機電流,直至閥芯準確穩定在指令位置,形成一個高帶寬的位置閉環。這種“電子反饋”取代了傳統伺服閥復雜的“力反饋桿”機械結構,簡化了設計,增加了靈活性。
第三章:閥芯振蕩的多物理場耦合機理深度剖析
航空雙系統直驅伺服閥的閥芯振蕩是一種典型的流固耦合失穩現象,其根源在于機械系統、流體動力系統與控制系統三者之間的不利能量交互。本章將從多物理場耦合的角度,系統解構其誘發機理。
3.1 流體動力誘發機理:從穩態失穩到動態沖擊
負阻尼瞬態液動力:當閥芯快速運動時,會壓縮或膨脹閥控腔內的油液。根據流體的可壓縮性和慣性,由此產生的瞬態液動力方向可能與閥芯運動速度方向相同,即形成“負阻尼”。當負阻尼效應足夠大,足以抵消系統固有的正阻尼(機械阻尼、黏性阻尼)時,微小的擾動就會被放大,形成自持振蕩。研究表明,在某些閥口形狀和工況下,瞬態液動力是導致射流管伺服閥、錐閥等產生高頻嘯叫的主要原因。
空化(氣穴)與壓力脈動:這是誘發超高頻振蕩(數千赫茲)的核心流體因素。在閥口節流區域,當局部壓力低于油液飽和蒸汽壓時,油液中的空氣析出或油液汽化,形成氣泡。這些氣泡隨流至高壓區時瞬間潰滅,產生極強的局部微觀射流和沖擊波(壓力可達GPa級)。大量氣泡的隨機潰滅會在閥芯表面和流場中引入高頻、寬頻帶的劇烈壓力脈動。
對閥芯的直接作用:作用于閥芯凸肩環面上的潰滅沖擊力是不均勻和時變的,形成前文所述的 “氣穴附著力” ,直接激勵閥芯產生微幅高頻抖動。
誘發流場不穩定:空化區的形態(如云狀空穴)是不穩定的,會發生周期性的生長、脫落和潰滅,這種空化云的自激振蕩會引發流場壓力的周期性大尺度脈動,其頻率與流道結構、流速相關,可能進一步與閥芯結構模態耦合。研究表明,減小閥芯位移(小開度)會導致氣相區擴大和氣相密度增加,加劇了空化的不穩定性。
流體分離與旋渦脫落(卡門渦街):當高速射流流經閥口、閥腔或遇到偏轉板等障礙時,會發生流動分離,在下游形成交替脫落的旋渦對,即卡門渦街。這種周期性的旋渦產生與脫落,會在閥芯表面和流道壁面產生周期性的壓力波動。研究指出,這種由剪切層振蕩誘發的壓力脈動是伺服閥高頻振動與噪聲的重要原因。
湍流脈動與能量耗散:研究通過數值模擬揭示了閥內復雜渦流結構的演變。渦流的形狀、強度和脫落位置隨閥開度變化,直接影響流場的能量損失和噪聲頻譜,從而影響振蕩的形式和強弱。
3.2 機械結構誘發機理:剛度不足與模態耦合
傳動鏈縱向剛度不足:雙系統閥芯長度顯著增加,連接電機與閥芯的拉桿等傳動件在巨大液壓力作用下會發生彈性變形。這使得驅動端(電機位置)與負載端(閥芯受力點)之間并非理想的剛性連接,而是一個“質量-彈簧-阻尼”系統。當流體力的激勵頻率接近該傳動系統的固有頻率時,就會引發嚴重的機械諧振。
結構模態耦合:長閥芯本身具有多個低階彎曲和扭轉振動模態。流體力(特別是空化沖擊和旋渦脫落壓力)的寬頻激勵,可能激發這些結構模態,形成流固耦合振動。通過研究觀察到直驅伺服閥在小開度下易發生振蕩,部分原因可歸結于此。
間隙與非線性摩擦:閥芯與閥套間的徑向配合間隙是必要的,但也帶來了非線性問題。油膜壓力的不對稱分布可能引發液壓卡緊,而庫倫摩擦在閥芯低速換向時會造成“爬行”現象,這兩種非線性因素都可能破壞運動的平滑性,在特定條件下誘發或加劇極限環振蕩。
3.3 控制系統誘發機理
控制器帶寬與相位滯后:閥內位置閉環控制器的帶寬必須遠高于預期的流體擾動頻率,才能有效抑制擾動。若控制器帶寬不足,或存在較大的相位滯后,則無法對高頻流體沖擊力做出及時補償,導致閥芯偏離指令位置。
傳感器噪聲與量化誤差:位移傳感器的測量噪聲或數字控制的量化誤差,會作為虛假信號引入閉環系統,可能被放大,尤其是在高增益控制下,可能誘發高頻抖動。
參數敏感性與負載適配:直驅閥的控制性能對負載特性(如作動筒容積、負載剛度)較為敏感。針對不同負載,控制器參數需要精細調試,否則容易導致系統在某一工況下穩定,在另一工況下失穩。

第四章:閥內流動數值模擬與閥芯動力學建模方法
為精確預測和深入理解振蕩機理,必須借助先進的仿真工具,建立能夠反映多物理場耦合作用的數值模型。
4.1 基于CFD的閥內非定常流場模擬
計算流體力學已成為研究伺服閥內部復雜流動的標淮工具。其目標是獲取閥芯表面的瞬態壓力分布和流體力,特別是捕捉空化、旋渦等瞬態現象。
模型建立:首先利用三維CAD軟件(如SolidWorks)建立包含所有關鍵流道(閥口、閥腔、節流槽)的精確流體域模型。
多相流與空化模型:為了模擬空化,必須采用多相流模型。常用的是混合模型(Mixture Model)或歐拉-歐拉模型,并耦合空化模型(如Schnerr-Sauer、Zwart-Gerber-Belamri模型)。這些模型通過求解氣相體積分數輸運方程來描述氣泡的生長與潰滅。
湍流模型:閥內流動多為高雷諾數湍流。可采用k-ε系列模型、k-ω SST模型或更高級的大渦模擬(LES)。對于涉及強剪切和分離的流動,k-ω SST模型通常能提供較好的精度。
動網格技術:為了模擬閥芯運動對流場的影響,需采用動網格技術。可預設閥芯按一定規律(如正弦振蕩)運動,計算其非定常流體力;也可與后續的動力學方程進行聯合仿真(流固耦合FSI)。
關鍵模擬結果:通過CFD仿真,可以直觀獲得:
不同開度、壓差下的空化云分布與演變過程。
閥芯表面的瞬態壓力脈動頻譜,識別主頻成分。
作用于閥芯各凸肩的瞬態流體力時域數據,這是構建高精度動力學模型的輸入。
2022年重慶大學的研究成功運用CFD方法建立了直驅伺服閥閥芯/閥套的物理失效模型,分析了壓差、顆粒直徑等因素對侵蝕磨損的影響,驗證了CFD在該類精密部件分析中的有效性。
4.2 閥芯系統動力學建模與聯合仿真
CFD提供了高精度的流體力,但全三維瞬態FSI計算成本極高,不適用于系統級動態分析和控制設計。因此,通常采用“聯合仿真”或“數據交互”策略。
高精度動力學建模:建立閥芯運動的集中參數動力學方程(如第二章所述)。方程中的液動力和氣穴附著力再是簡單的解析公式,而是來自CFD計算的數據集。
系統級仿真平臺:將包含查表模塊的閥芯動力學模型,與直線電機電磁模型、傳感器模型以及控制器模型一起,集成到系統仿真環境(如MATLAB/Simulink、AMESim、Simscape)中。
AMESim應用:燕山大學2023年的研究利用AMESim對一種新型雙冗余電液伺服閥(DREHSV)進行了建模與故障仿真,成功分析了噴嘴堵塞、閥芯磨損等故障對靜動態特性的影響,證明了多學科仿真軟件在伺服閥系統分析中的強大能力。對于雙系統直驅閥,可類似地建立其高保真模型,用于預測振蕩條件和測試抑制算法。
控制-動力學聯合仿真:在Simulink中,可以方便地將動力學模型與先進控制算法(如ADRC、MPC)結合,進行閉環仿真,評估控制策略對振蕩的抑制效果。
第五章:閥芯振蕩的綜合性抑制策略
基于對振蕩機理的深刻理解,抑制策略需從“被動免疫”和“主動干預”兩個層面綜合施策,涵蓋結構設計、控制算法和健康管理。
5.1 結構優化與被動阻尼設計
這是從源頭上改變系統動力學特性的根本方法。
5.1.1 閥口與流道優化
抗空化設計:優化節流邊型線(如采用V型或拋物線型),使壓力梯度平緩,避免壓力驟降至汽化壓以下;在閥套上設計“抗空化槽”(減壓槽),為氣泡潰滅提供緩沖空間,降低沖擊強度。
抑制渦流設計:優化閥腔幾何形狀,避免出現流動“死區”和急劇的截面變化,平滑過渡,以削弱卡門渦街的產生條件。
液動力補償:通過設計閥芯凸肩的特定輪廓(如開均壓槽、設計補償斜面),部分抵消穩態液動力,降低對驅動力的需求,提升穩定性。
5.1.2 傳動鏈剛度強化與阻尼增強
提高縱向剛度:選用高彈性模量材料(如高強度合金鋼、鈦合金)制造拉桿,優化其直徑與連接結構,確保傳動鏈的一階縱振固有頻率遠高于主要的流體擾動頻率。
引入擠壓油膜阻尼:借鑒直動式2D壓力伺服閥的設計,在閥芯臺肩端面設計特殊的圓盤結構,利用微小間隙內油液的擠壓效應產生巨大的黏性阻尼力,能有效衰減高頻振動。
應用智能材料阻尼:在傳動關鍵部位敷設約束層阻尼材料或采用壓電材料作為被動/半主動阻尼器,吸收振動能量。
5.2 先進控制算法:主動抑制的核心
當結構優化達到極限時,智能控制算法成為抑制振蕩、提升魯棒性的關鍵。
自抗擾控制(ADRC):ADRC的核心思想是將系統模型未知部分、外部擾動和內部參數變化統一視為“總擾動”,并通過擴張狀態觀測器(ESO)進行實時估計和補償。
在直驅伺服閥控制中,ESO可以觀測出空化沖擊、渦脫落等引起的“力擾動”。控制器在輸出控制力時,提前減去這個估計的擾動量,從而使得閥芯實際感受到的凈擾動大大減小,有效平抑了由此引起的振蕩。
ADRC不依賴于精確的物理模型,對系統非線性、參數時變有很強的魯棒性,非常適合應對復雜的流固耦合問題。
模型預測控制(MPC):MPC基于系統的預測模型,通過滾動優化求解未來一段時間內的最優控制序列(電機電流),并考慮系統的輸入輸出約束。
對于抑制振蕩,MPC的優勢在于其“預見性”。它可以根據當前狀態和模型,預測到未來可能因流體負阻尼等效應引發的失穩趨勢,并提前施加糾正性的控制力,將振蕩扼殺在萌芽狀態。
復合控制策略:研究表明,將ADRC的強擾動抑制能力與MPC的前瞻優化能力相結合,構成ADRC-MPC復合控制器,能取得更佳效果。該復合方法通過對直線電機電流進行高頻小范圍的精細調節,可有效抵消突變液流力的影響,顯著優于傳統的PID控制。
5.3 智能監測與健康管理(PHM)
在閥的整個生命周期內,預防和預警同樣重要。
狀態感知:除了基本的位置傳感器,可集成高頻加速度傳感器或聲發射傳感器,直接監測閥芯或閥體的振動頻譜。流噪聲和壓力傳感器的信號也可用于分析空化強度。
特征提取與故障診斷:基于大數據和機器學習(如神經網絡、深度學習),從多源傳感器數據中提取與振蕩相關的特征(如特定頻帶的能量、空化噪聲強度)。利用AMESim等工具生成的豐富故障數據,可以訓練高效的神經網絡診斷模型,實現振蕩早期預警和根源判斷(如判別是空化加劇還是機械磨損)。
自適應調節:PHM系統可根據診斷結果和當前飛行工況,自適應地微調控制器參數,或切換控制模式(例如,在檢測到強空化時,臨時限制最大指令速度或引入額外的濾波),使閥始終工作在最優穩定區間。
第六章:技術總結與發展展望
6.1 核心優勢與技術突破
航空雙系統直驅伺服閥代表了飛行控制作動技術向高可靠、高集成、高功率密度方向發展的重要突破。其核心優勢在于:通過結構簡化(取消先導級)實現了抗污染能力與可靠性的躍升;通過雙閥芯一體設計滿足了飛機對稱舵面機械同步驅動的獨特需求,大幅簡化了系統;通過全電氣位置反饋與閉環控制,獲得了更高的設計自由度和控制精度。
當前的技術突破點集中在:1)對復雜流固耦合振蕩機理的認識日益深入,從宏觀液動力深入到微觀空化潰滅和渦動力學層面;2)多物理場高保真建模與聯合仿真技術日趨成熟,為預測和復現振蕩提供了強大工具;3)智能控制算法(ADRC, MPC) 的應用,為解決這一非線性強擾動控制難題提供了行之有效的主動抑制方案;4)精密制造技術的進步,如我國在RDDV旋轉直驅閥中突破的“旋轉閥偶件精密多級配加工技術”和“基于性能的檢測技術” ,為高性能直驅閥的工程化奠定了基礎。
6.2 未來展望
面向未來更高性能的航空飛行器,雙系統直驅伺服閥的研究將呈現以下趨勢:
機理研究縱深化:結合超高分辨率CFD(如LES、DES)和先進實驗測量技術(如高速顯微攝影、粒子圖像測速),進一步揭示納米/微米尺度空化潰滅與壁面相互作用的微觀機制,以及多空泡群潰滅的協同效應,建立更精確的微觀-宏觀跨尺度力傳遞模型。
材料與結構智能化:探索將超磁致伸縮材料、形狀記憶合金等新型智能材料應用于驅動或阻尼單元,開發具有自感知、自調節能力的“智能閥芯”或“智能支撐結構”,實現振動的主被動一體化抑制[citation:用戶提供]。
控制算法融合化與邊緣智能化:進一步發展基于深度強化學習的自適應控制、將物理模型與數據驅動模型融合的混合智能控制。隨著機載計算能力的提升,將更復雜的智能控制算法部署在閥的本地邊緣控制器(IED)中,實現毫秒級的自適應振蕩抑制。
研發模式數字化與全生命周期管理:構建涵蓋“數字孿生”的完整研發體系。通過虛擬樣機在數字空間中模擬各種極端工況和磨損老化過程,優化設計。結合PHM,實現從設計、制造到服役、維護的全生命周期性能保障與健康管理。
多學科協同與產學研融合:如同 “2025年電液伺服閥技術論壇” 所倡導的,未來需要持續加強高校(如浙江大學、同濟大學、北京航空航天大學等)、科研院所與主機廠所之間的深度合作,聚焦高性能控制、極端環境適應性等核心挑戰,共同推動國產高端伺服閥技術的自主創新與產業升級。

航空雙系統直驅伺服閥作為下一代高可靠性飛控作動系統的關鍵執行元件,其閥芯振蕩問題是橫亙在卓越性能與工程應用之間的主要障礙。本文系統論述表明,這一問題是機械、流體、控制等多領域深度耦合的集中體現。根源在于高壓高速流場誘發的瞬態空化、壓力脈動與旋渦脫落等復雜流體現象,與長閥芯傳動結構剛度、阻尼特性相互作用,并在不恰當的控制律下被激發或放大。解決之道,必須堅持“機理引領、仿真驅動、綜合抑制”的路徑。即通過高保真CFD與動力學聯合仿真深刻認知機理;通過結構優化(抗空化設計、增阻尼設計)提升系統固有穩定性;通過部署以自抗擾控制和模型預測控制為代表的先進智能算法,實現對突變流體力擾動的主動、精準補償;最終結合智能狀態監測,形成貫穿產品全生命周期的振動抑制與健康管理能力。隨著相關基礎理論、關鍵技術及工程化工藝的持續突破,航空雙系統直驅伺服閥必將為實現更安全、更高效、更智能的飛行控制提供堅實可靠的作動基礎。
&注:此文章靈感來源于航空學報,文章內使用的圖片來源于網絡公開獲取,僅供參考使用,如侵權可聯系我們刪除,如需進一步了解公司產品及商務合作,請與我們聯系!!

湖南泰德航空技術有限公司于2012年成立,多年來持續學習與創新,成長為行業內有影響力的高新技術企業。公司聚焦高品質航空航天流體控制元件及系統研發,深度布局航空航天、船舶兵器、低空經濟等高科技領域,在航空航天燃/滑油泵、閥元件、流體控制系統及航空測試設備的研發上投入大量精力持續研發,為提升公司整體競爭力提供堅實支撐。
公司總部位于長沙市雨花區同升街道匯金路877號,株洲市天元區動力谷作為現代化生產基地,構建起集研發、生產、檢測、測試于一體的全鏈條產業體系。經過十余年穩步發展,成功實現從貿易和航空非標測試設備研制邁向航空航天發動機、無人機、靶機、eVTOL等飛行器燃油、潤滑、冷卻系統的創新研發轉型,不斷提升技術實力。
公司已通過 GB/T 19001-2016/ISO 9001:2015質量管理體系認證,以嚴苛標準保障產品質量。公司注重知識產權的保護和利用,積極申請發明專利、實用新型專利和軟著,目前累計獲得的知識產權已經有10多項。湖南泰德航空以客戶需求為導向,積極拓展核心業務,與國內頂尖科研單位達成深度戰略合作,整合優勢資源,攻克多項技術難題,為進一步的發展奠定堅實基礎。
湖南泰德航空始終堅持創新,建立健全供應鏈和銷售服務體系、堅持質量管理的目標,不斷提高自身核心競爭優勢,為客戶提供更經濟、更高效的飛行器動力、潤滑、冷卻系統、測試系統等解決方案。
-
航空
+關注
關注
2文章
1003瀏覽量
28604 -
飛行器
+關注
關注
13文章
840瀏覽量
47813 -
電液伺服
+關注
關注
0文章
11瀏覽量
8551
發布評論請先 登錄



永磁耦合器電機多物理場分析的方法
淺析 | 永磁耦合器電機多物理場分析方法

永磁耦合器電機多物理場分析方法
電液伺服閥作用_電液伺服閥選型

功率放大器在音圈電機直驅水液壓閥的動態特性試驗研究中的應用
基于多物理場耦合的晶圓切割振動控制與厚度均勻性提升



 工商網監
工商網監
評論