") Nature傳感器新子刊第一篇論文出爐,中國青年學(xué)者聯(lián)手撰寫
Nature傳感器新子刊第一篇論文出爐,中國青年學(xué)者聯(lián)手撰寫

近期,知名學(xué)術(shù)期刊《Nature》(《自然》)旗下專注于傳感器研究領(lǐng)域的子刊《Nature Sensors》,刊發(fā)了創(chuàng)刊以來的第一篇論文。
《Nature Sensors》是今年4月份,Nature新設(shè)立的子刊,將于2026年正式上線,《Nature Sensors》的創(chuàng)刊對全球傳感器領(lǐng)域科研有重要的風(fēng)向標(biāo)意義。《Nature Sensors》聚焦于傳感器技術(shù)的各個關(guān)鍵層面,廣泛涵蓋生物、計算、工程和系統(tǒng)等多個領(lǐng)域的研究。從新型傳感器材料與裝置的研發(fā),到傳感器系統(tǒng)的設(shè)計、集成以及廣泛應(yīng)用,都是期刊重點關(guān)注的范疇。
該論文題為“A noise-tolerant human–machine interface based on deep learning-enhanced wearable sensors”,由多位中國青年學(xué)者聯(lián)合撰寫。
該論文原文可在文末【閱讀原文】查看。

在當(dāng)下從虛擬現(xiàn)實到智能機器人不斷加速演進(jìn)的時代,人機接口早已不再滿足于“能識別”,而是要做到“隨時隨地、任意姿態(tài)都能識別”。然而現(xiàn)實世界并不溫柔:IMU 傳感器對任何震動、擺臂、姿態(tài)變化都高度敏感,噪聲的頻率和幅度往往與手勢本身重疊,讓動作信號在真實環(huán)境中如同“淹沒于海嘯之中”。
傳統(tǒng)的硬件穩(wěn)固、濾波算法或多傳感器補償都有局限,尤其是在跑步、騎行、震動或水下環(huán)境中,要從偽影中“挖出真正的手勢”幾乎是不可能任務(wù)。這種挑戰(zhàn)使得當(dāng)前很多人機界面都還停留在實驗室條件,難以走入真實場景。
在此,美國加州大學(xué)圣地亞哥分校的徐升教授團隊聯(lián)合Joseph Wang教授用一種深度學(xué)習(xí)增強的可穿戴傳感器系統(tǒng),讓這個不可能任務(wù)出現(xiàn)了突破。他們開發(fā)出一種深度學(xué)習(xí)增強的可穿戴人機接口系統(tǒng),通過 IMU + EMG 多模態(tài)采集、復(fù)合數(shù)據(jù)集訓(xùn)練、卷積神經(jīng)網(wǎng)絡(luò)識別,以及可拉伸可穿戴的集成設(shè)計,實現(xiàn)了在跑步、震動、姿態(tài)變化甚至海浪干擾中依然保持高精度、實時手勢識別。
更令人驚喜的是,它不僅能穩(wěn)定識別動作,還能精確控制機械臂完成抓取、倒液等操作,仿佛為人機界面裝上了“抗噪聲盔甲”和“智能大腦”。這項技術(shù)讓未來的 VR 操作、戶外人機交互甚至水下機器人控制都看到了全新可能。
相關(guān)成果以“A noise-tolerant human–machine interface based on deep learning-enhanced wearable sensors”為題發(fā)表在《NatureSensors》上,UCSD 博士后研究員陳相君Xiangjun Chen、樓之源Zhiyuan Lou(UCSD 碩士畢業(yè)生,現(xiàn)英國帝國理工學(xué)院博士研究生)、郜曉翔Xiaoxiang Gao博士(現(xiàn)東南大學(xué)青年首席教授)和尹鹿Lu Yin博士(UCSD 博士畢業(yè)生,現(xiàn) Persperion Diagnostics 公司 CEO)是共同第一作者,徐升教授和 Joseph Wang 教授擔(dān)任共同通訊作者。

?
高度集成、可穿戴、可拉伸的人機界面系統(tǒng)
在系統(tǒng)的硬件設(shè)計中,作者把一個完整的動作識別與無線通信平臺壓縮到只有1.8 × 4.5 cm2、厚度 2 mm 的小巧貼膚設(shè)備中(圖1a)。它像一片輕薄的電子貼片,卻包含了六通道 IMU、肌電(EMG)模塊、藍(lán)牙MCU 以及一顆可拉伸 Zn/Ag?O電池。
IMU 捕捉加速度與角速度,EMG 負(fù)責(zé)識別抓握動作,而藍(lán)牙模塊則將處理后的信號實時發(fā)往后臺控制端。整個電路采用多層結(jié)構(gòu)堆疊(圖1b),柔軟基底與蛇形互連共同保證器件能承受超過 20% 的拉伸而不失效。
同時,為了確保長期穩(wěn)定工作,研究者自制了一顆耐彎折、可拉伸且循環(huán)性能穩(wěn)定的電池,它在彎折、拉伸條件下仍能保持約 25mAh的容量(圖1c)。無線通信方面,藍(lán)牙信號在 20 米內(nèi)穩(wěn)定傳輸(圖1d),而在連續(xù)運行 30 分鐘后,設(shè)備表面溫度也僅維持在 27.7°C(圖1e),佩戴安全無虞。

? 圖1:系統(tǒng)整體結(jié)構(gòu)與性能 ? 真實世界的“混亂數(shù)據(jù)”,讓模型學(xué)會在噪聲中識別動作
為了讓系統(tǒng)學(xué)會在復(fù)雜環(huán)境中識別動作,研究團隊沒有只采集理想條件下的手勢,而是構(gòu)建了一個包含“噪聲真實面貌”的數(shù)據(jù)集(圖2a)。首先,他們采集了 19種基本前臂動作的 IMU 信號,每個動作僅持續(xù)約 1 秒。隨后,他們加入海量真實偽影:例如在姿態(tài)變化時,引力分量變化造成的基線漂移(圖2b);在高頻振動中,按摩槍產(chǎn)生的劇烈擾動(圖2c);以及跑步過程中手臂自然擺動疊加身體震動的復(fù)合擾動(圖2d)。
這些擾動不僅幅度大,還在頻率、波形上與手勢信號高度重疊,正是現(xiàn)實中 IMU最難處理的部分。與此同時,EMG 信號被用來區(qū)分抓握與松開(圖2e),即便在跑步或振動中其信噪比顯著下降,但仍保留著獨特的肌肉激活結(jié)構(gòu)。

? 圖2:19?種動作的 IMU 信號及三類典型噪聲 ?
卷積神經(jīng)網(wǎng)絡(luò)讓動作“脫離噪聲”,遷移學(xué)習(xí)讓新用戶即刻上手
在這樣復(fù)雜的數(shù)據(jù)條件下,研究者構(gòu)建了一個結(jié)構(gòu)優(yōu)化的一維卷積神經(jīng)網(wǎng)絡(luò)(CNN),對 IMU 六通道信號進(jìn)行融合與分層特征提取(圖3c)。與全連接網(wǎng)絡(luò)與循環(huán)網(wǎng)絡(luò)相比,CNN 在召回率、精度、F1 值等指標(biāo)上全面勝出(圖3b),顯示它對復(fù)雜噪聲具有更強的特征分離能力。模型訓(xùn)練采用了復(fù)合數(shù)據(jù)集,即把手勢信號與不同階段的跑步、振動、姿態(tài)變化噪聲疊加在一起,使模型學(xué)會在最混亂的情況下捕捉手勢的穩(wěn)定特征。
考慮到不同人的手勢幅度與噪聲模式可能差異巨大,研究團隊還引入了參數(shù)級遷移學(xué)習(xí),讓系統(tǒng)具有“面向個人快速適配”的能力(圖3d)。模型先在五個人的大規(guī)模數(shù)據(jù)集上預(yù)訓(xùn)練,而面對新用戶時,只需要每個動作提供 2 條信號(坐著一條、躺著一條),模型就能在極少數(shù)據(jù)下迅速調(diào)整參數(shù),使識別準(zhǔn)確率從 51% 一舉提升到 92%(圖3e)。
為了實現(xiàn)實時識別,他們還加入滑動窗口機制(圖3f),每隔 0.25 秒基于 1 秒窗口進(jìn)行一次預(yù)測,使系統(tǒng)在動作連續(xù)變化中也能平穩(wěn)輸出,不會出現(xiàn)“動作斷點”。

? 圖3:卷積神經(jīng)網(wǎng)絡(luò)架構(gòu)、遷移學(xué)習(xí)流程、不同模型對比、混淆矩陣與滑動窗口機制 ?
跑步、高頻振動、姿態(tài)變化下仍可穩(wěn)定操控機械臂
系統(tǒng)的最終檢驗來自真實任務(wù):控制機械臂執(zhí)行動作(圖4a)。在傳統(tǒng) IMU 系統(tǒng)中,跑步或高頻振動會讓加速度與角速度信號劇烈跳動,幾乎無法提取有效手勢指令;但在深度學(xué)習(xí)處理后,這些噪聲被模型“消化”掉,最終輸出的手勢分類依舊清晰穩(wěn)定。研究者在跑步機上邊跑邊操作,機械臂依然能夠平穩(wěn)執(zhí)行取液并倒入燒杯的動作(圖4b),沒有因為噪聲而出現(xiàn)抖動或動作錯誤。
更難能可貴的是,不論用戶是在高頻振動下、姿態(tài)變換中,還是在“跑步 + 振動”的極端組合場景下,系統(tǒng)仍能連續(xù)識別動作并驅(qū)動機械臂無縫操作。結(jié)合 EMG 判斷抓取動作后,機械手甚至能在噪聲干擾下實現(xiàn)精準(zhǔn)的抓取與松開。這標(biāo)志著該系統(tǒng)從單純的“動作識別”真正跨越到“任務(wù)控制”,具備進(jìn)入現(xiàn)實世界的穩(wěn)定性。

? 圖4:在跑步、高頻振動等干擾下實時控制機械臂執(zhí)行抓取與倒液動作 ?
即使在海浪的周期干擾中,也能準(zhǔn)確識別動作
為了挑戰(zhàn)極端環(huán)境,研究者將設(shè)備放入海氣模擬器中,模擬不同波長、不同波高的海浪擾動(圖5a,b)。海浪的周期性與不規(guī)則疊加會讓 IMU 輸出產(chǎn)生極其復(fù)雜的“海浪噪聲”,這是 IMU 信號處理中最棘手的干擾之一。
但在深度學(xué)習(xí)模型訓(xùn)練后,系統(tǒng)能夠從“海浪 + 手勢”的疊加信號中依然分離出動作特征,實現(xiàn)穩(wěn)定高精度識別(圖5c)。令人意外的是,在海水環(huán)境中,EMG 電極與皮膚的界面阻抗更低,反而提升了抓握信號的穩(wěn)定性。
這意味著未來潛水員可以在海浪起伏的環(huán)境中,通過簡單的手勢操控水下機器人進(jìn)行探測、采樣、打撈等任務(wù),為海洋工程開辟新的操作方式。

? 圖5:海浪環(huán)境下的 IMU 信號采集與模擬海波干擾下的動作識別表現(xiàn) ? 小結(jié)
這項研究以系統(tǒng)級設(shè)計解決了可穿戴動作識別的核心瓶頸——對復(fù)雜動態(tài)噪聲的高度敏感性。從硬件的柔性集成,到真實噪聲采樣構(gòu)建的復(fù)合數(shù)據(jù)集,再到遷移學(xué)習(xí)加持的卷積神經(jīng)網(wǎng)絡(luò),最終實現(xiàn)了在跑步、震動、姿態(tài)變化與海浪干擾下依然可靠的實時識別與動作控制。
未來,通過更短窗口、更復(fù)雜動作、多模態(tài)融合以及更強的水下通信能力,這種抗噪聲、高魯棒性的可穿戴人機接口有望成為智能可穿戴設(shè)備、軟體機器人、VR 手勢控制、醫(yī)療康復(fù)乃至水下機器人操控的關(guān)鍵技術(shù)基礎(chǔ)。
本文部分資料來自:
高分子科學(xué)前沿《Nature新子刊,創(chuàng)刊論文出爐,中國青年學(xué)者聯(lián)手打造!》
-
傳感器
+關(guān)注
關(guān)注
2577文章
55247瀏覽量
792666
發(fā)布評論請先 登錄
蟬聯(lián)!明治傳感再次登頂中國工業(yè)光電傳感器第一

《Nature Sensors》創(chuàng)刊第三篇論文,中國青年學(xué)者發(fā)表,遠(yuǎn)程測心率更準(zhǔn)了!

磐時專家受邀出席科技X-Token Spark青年學(xué)堂

深蘭科技宣哲民博士入選2025福布斯中國青年海歸菁英100人
長城汽車斬獲2025年度中國青年科技創(chuàng)新“揭榜掛帥”擂臺賽一等獎
Nature Sensors第2篇,院士團隊突破可穿戴傳感器技術(shù)限制

中國第一的汽車超聲波傳感器公司奧迪威,IPO

【「高速數(shù)字設(shè)計(基礎(chǔ)篇)」閱讀體驗】 + 書籍評測第一篇
一種帶通濾波器在無位置傳感器轉(zhuǎn)子檢測中的應(yīng)用
Aigtek會議邀請:2025年第三屆電子元器件關(guān)鍵材料與技術(shù)青年學(xué)者論壇!

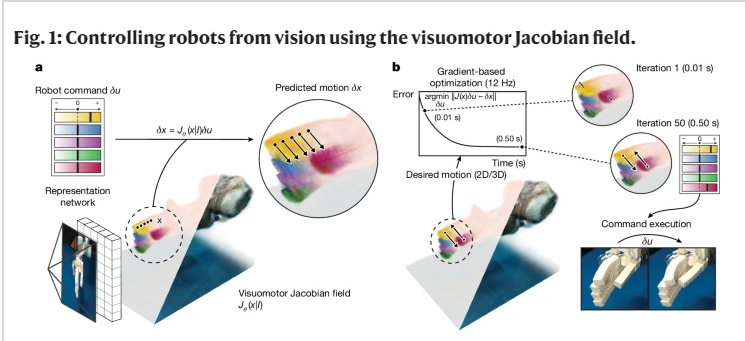
機器人也能純視覺控制?MIT華人博士團隊登上Nature主刊
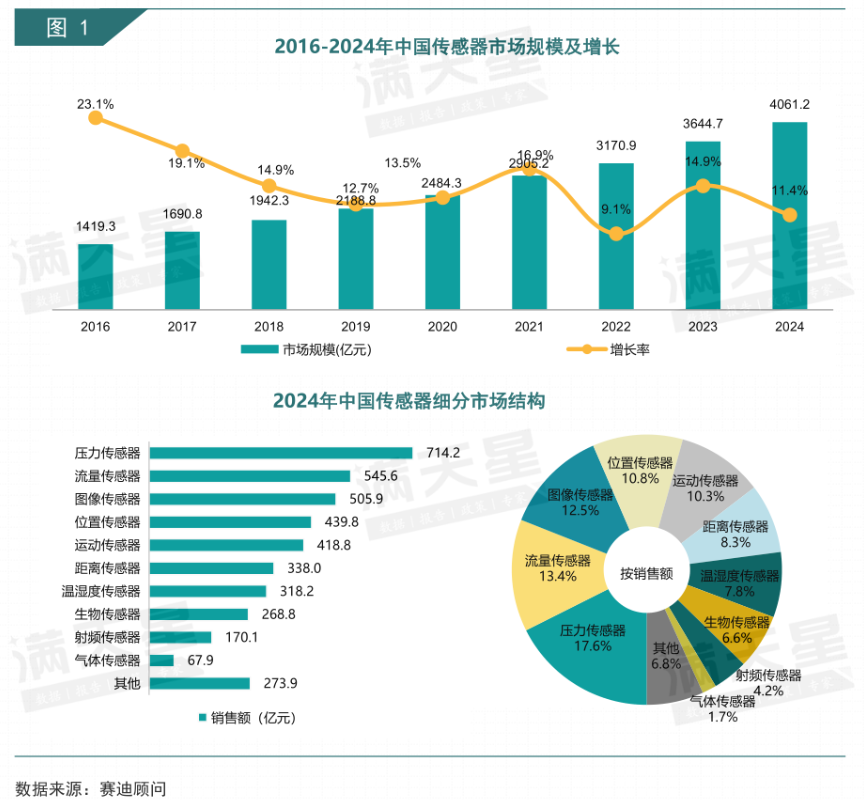
中國傳感器市場規(guī)模突破4000億!工信部產(chǎn)業(yè)研究院最新數(shù)據(jù)出爐
挑戰(zhàn)杯丨2025中國青年科技創(chuàng)新“揭榜掛帥”擂臺賽啟動,誠邁科技賽題等你來戰(zhàn)!

中國工程院院士:我國距離傳感器強國還有多遠(yuǎn)?
會議邀請 | Aigtek與您相約智能材料與傳感國際會議暨第二屆鐵電壓電材料青年學(xué)者論壇!




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論